


Pirmkārt, sapratīsim atšķirību starp astoņkopu un četrkopienu. Papildus nosaukumam tas ir arī motoru skaits uz sliedēm. T. i. kvadrocopters - četri dzinēji, astoņkopis - astoņi. Tas attiecas arī uz heksakopteru - sešiem, tricopteru - trīs utt. Ja, piemēram, vadotnes ir četri (X) un astoņi dzinēji, tad tas joprojām ir astoņkopis, bet tiek apzīmēts ar X8. T. i. uz četrām sliedēm, astoņi dzinēji.
Būtībā skaitļi ar prefiksu kopētājiem ir lidaparāti, kurus no zemes kontrolē operatora radio signāls. Kāds students no Indijas nolēma iet tālāk un izgatavot astoņkopu, kas spētu cilvēku pacelt gaisā. Šis nav lēts projekts. Finansējumu pārņēma izglītības iestāde.
Instrumenti un materiāli:
- Dzinēji Turnigy CA170 motori - 8 gab.;
- kontrolieris Turnigy Fatboy 300A - 4 gab.;
- Turnigy 200A HV kontrolieris - 4 gab.;
- raidītājs Hitech XG11 Tx / Rx;
-Lidojuma DJI A3 Pro kontrolieris;
-Lidojuma kontrolieris DJI Naza M V2;
- akumulators Zippy 22.2V 5Ah 40C LiPo - 16 gab.;
- lādētājs 6s LiPo;
-XT150 savienotāji - 50 gab .;
-Wire 8AWG silikona stieple - 10 metri;
Servos;
-Bumba skvoša spēlēšanai (Skvoša bumbiņas) - 4 gab .;
- MDF loksne 25cm x 50cm x 2mm;
-Drill;
- leņķa slīpmašīna;
- skrūvgrieži;
- uzgriežņu atslēgas;
- Knaibles;
-Lāzera griezējs vai lentzāģis;
- 4mm, 6mm un 8mm uzgriežņu, skrūvju un paplāksņu sortiments;
-Deglis;
-LED LED;
-Līmēšanas piederumi;
- 2 un 3 mm tērauda stieple;
-Telrep skrūve 100mm-200mm - 40 gab .;
- 40 āķi un bultskrūves;
-Tachometer Turnigy RPM;
-Power Analyzer (Turnigy Wattmeter / Ampmeter);
-Akumulatora kontrolieris;
- alumīnija profila caurules;
-Alumīnija plāksne;
- abpusēja lente;
-Metināšanas mašīna;
-Roulette;
-Datoru ar Fusion 360;
- akumulators 11,1 V 2200 mAh LiPo 30C;
-Blīvs audums 1,2m x 1,2m;
- Spēcīgs pavediens un adata;
-Siksnu drošība;
Pirmais solis: dizains
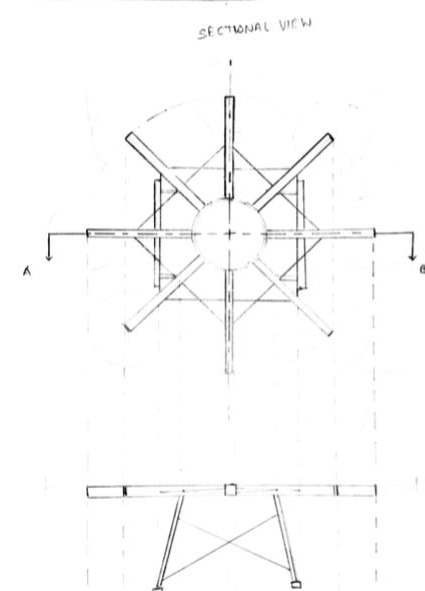
Izstrādājot apkalpoto astoņkopu, kapteinis apsvēra dažādas konfigurācijas iespējas, kā arī X8 un H, un T, bet nonāca pie secinājuma, ka visoptimālākais dažādu iemeslu dēļ ir oktokoptera dizains atbilstoši tradicionālajai shēmai.
Tad vajadzēja noskaidrot, cik lielumam vajadzētu būt oktoktoram. Aprēķini tika veikti, izmantojot kā modeli Fusion 360, izmantojot CAD modeļus, un aprēķinos tika ņemtas vērā esošās skrūves. Optimālais izrādījās trīs metru diametrs, viena metra augstums. Iekšējais grozs, cilvēkam 55x55 cm.

Otrais solis: iepirkumu grozs
Rāmis tika metināts no alumīnija kvadrātveida profila ar plauktu 50 mm un sienas biezumu 2 mm.
Profils tika sagriezts un metināts. Šuves tiek notīrītas.



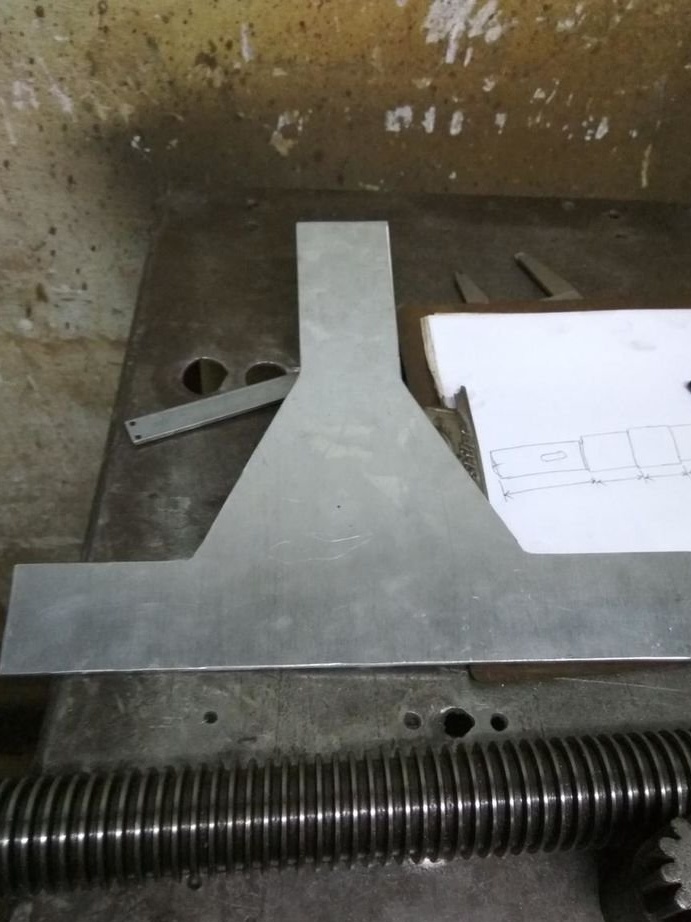
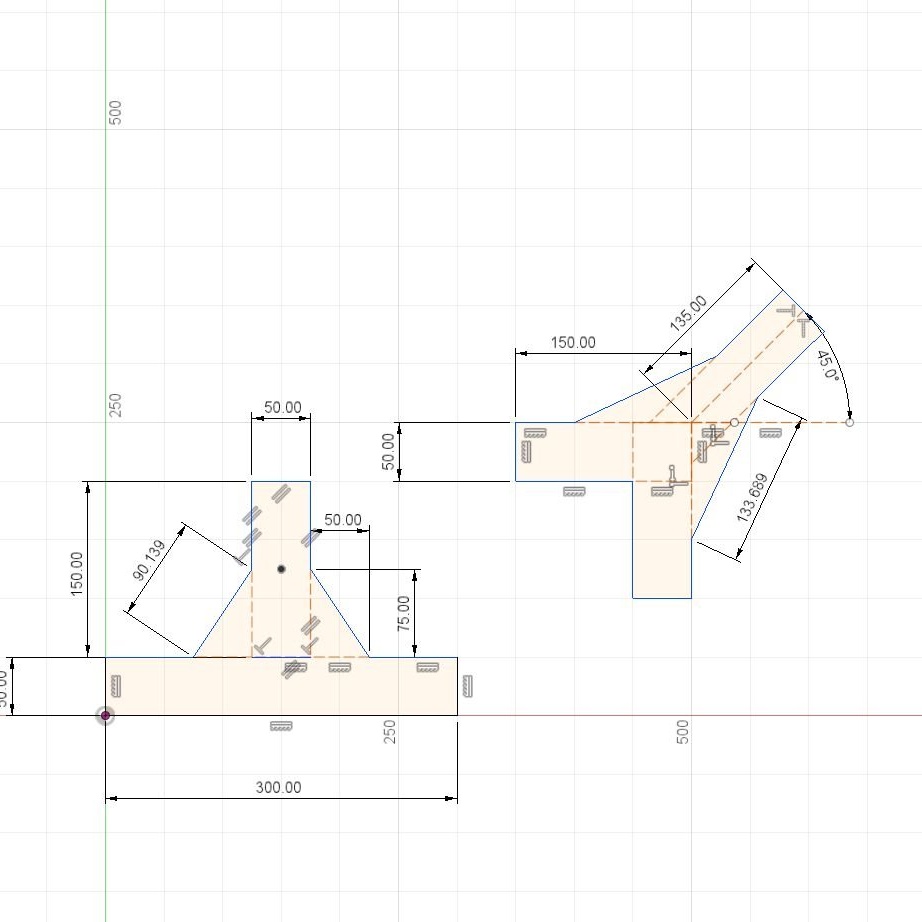
Trešais solis: Montāžas plātnes
Iekavās kapteinis izmantoja 1,5 mm alumīnija plāksnes. Kopā ir astoņi iekavās, četri stūros un četri rāmja vidū. Rokas pleca un atbalsta daļas garums ir 15 cm katrs. Kronšteini tika izstrādāti Fusion 360. Plāksnes tika sagrieztas ar frēzmašīnu. Tajos tiek urbti montāžas caurumi. Tad kronšteini tika metināti pie rāmja.






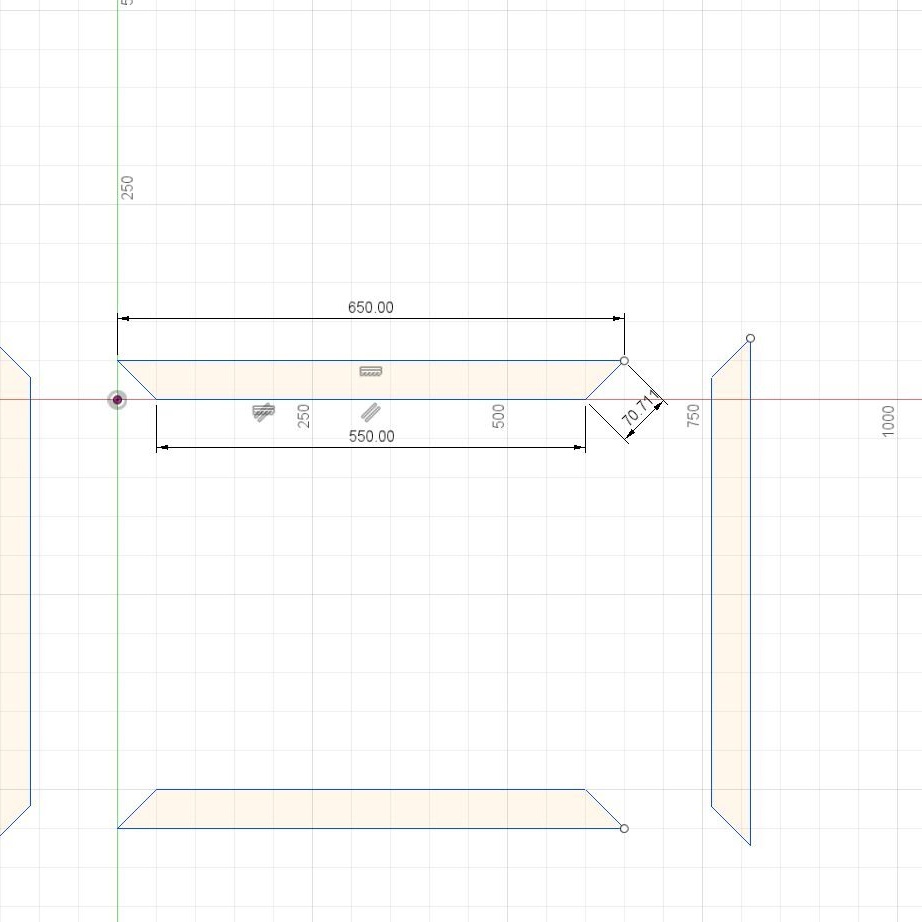
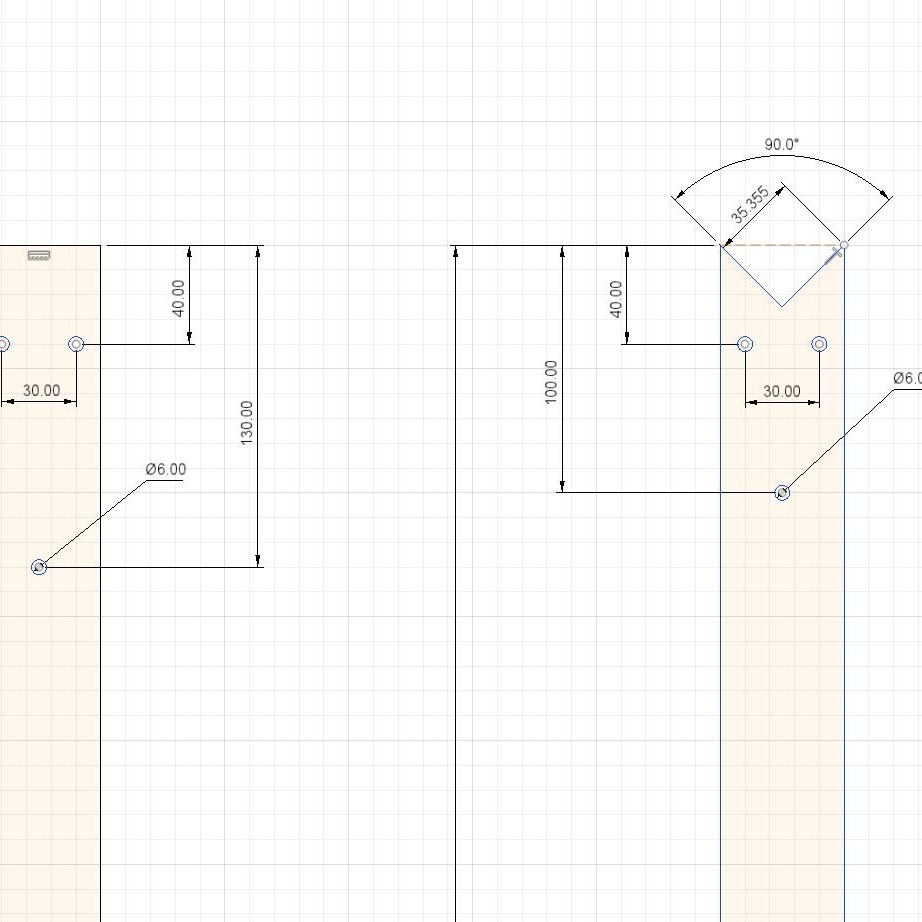
Ceturtais solis: Pārvadātāja profils
Šie profili ir piestiprināti pie stiprinājumiem, un to galos ir uzstādīti motori. Profili ir kvadrātveida, 50 X 50 cm, un tiem ir dažādi garumi. Stūros ir piestiprināti 112,5 cm gari profili, sānos - 125 cm profils, leņķa profilos 45 grādu leņķī tiek veikts izgriezums. Ir nepieciešams, lai tā gala virsma būtu blakus leņķa plaknei.
Lai piestiprinātu profilus pie stiprinājumiem, meistars urbj skrūvju caurumus.




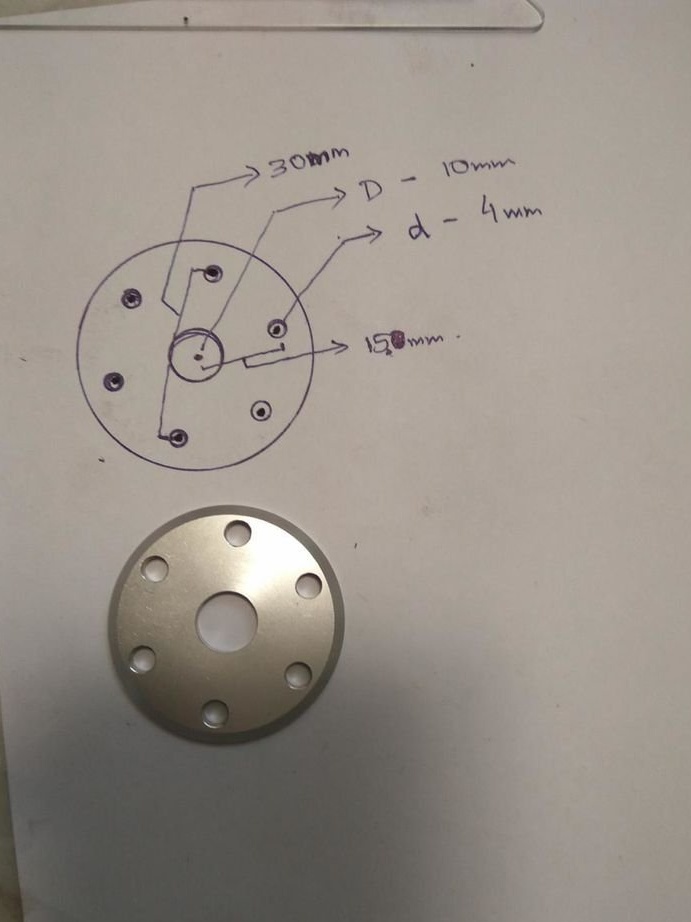
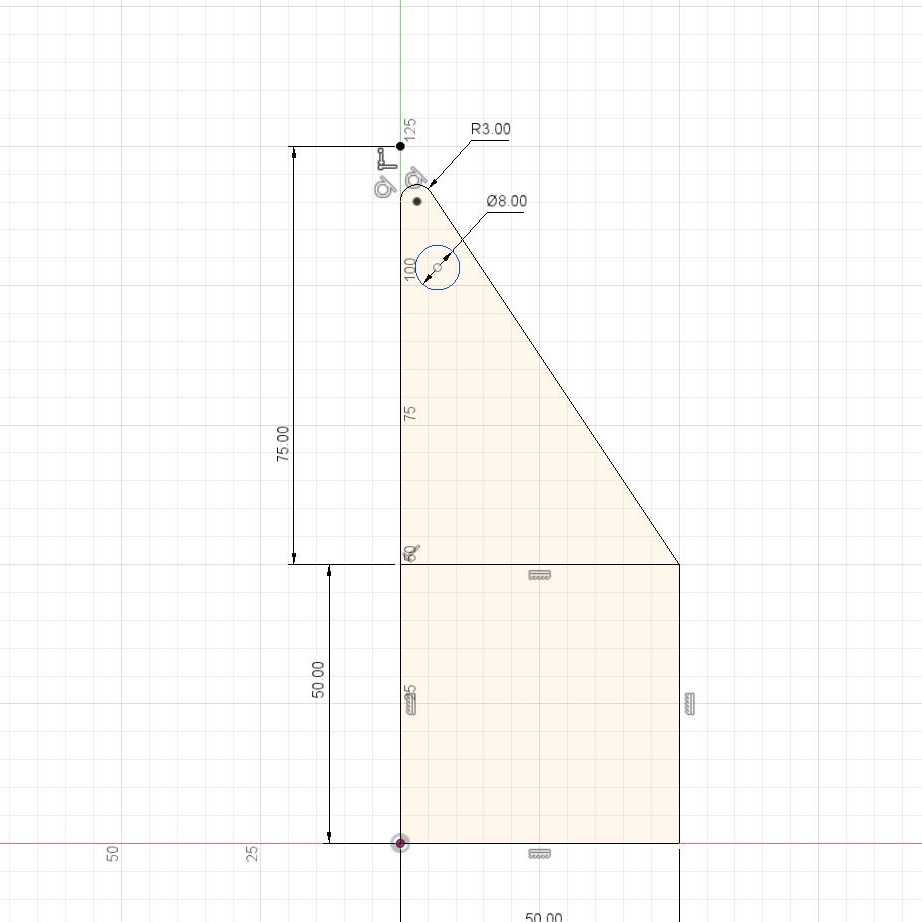
Piektais solis: motora stiprinājums
Motori ir pieskrūvēti uz alumīnija kvadrātveida plāksnes. No plāksnes apakšas, paralēli viena otrai, ir pieskrūvēti divi stūri. Attālums starp tiem ir vienāds ar profila platumu. Tālāk plāksne ar motoru ir uzstādīta uz profila, tiek urbti montāžas caurumi un viss ir savīti ar skrūvēm.





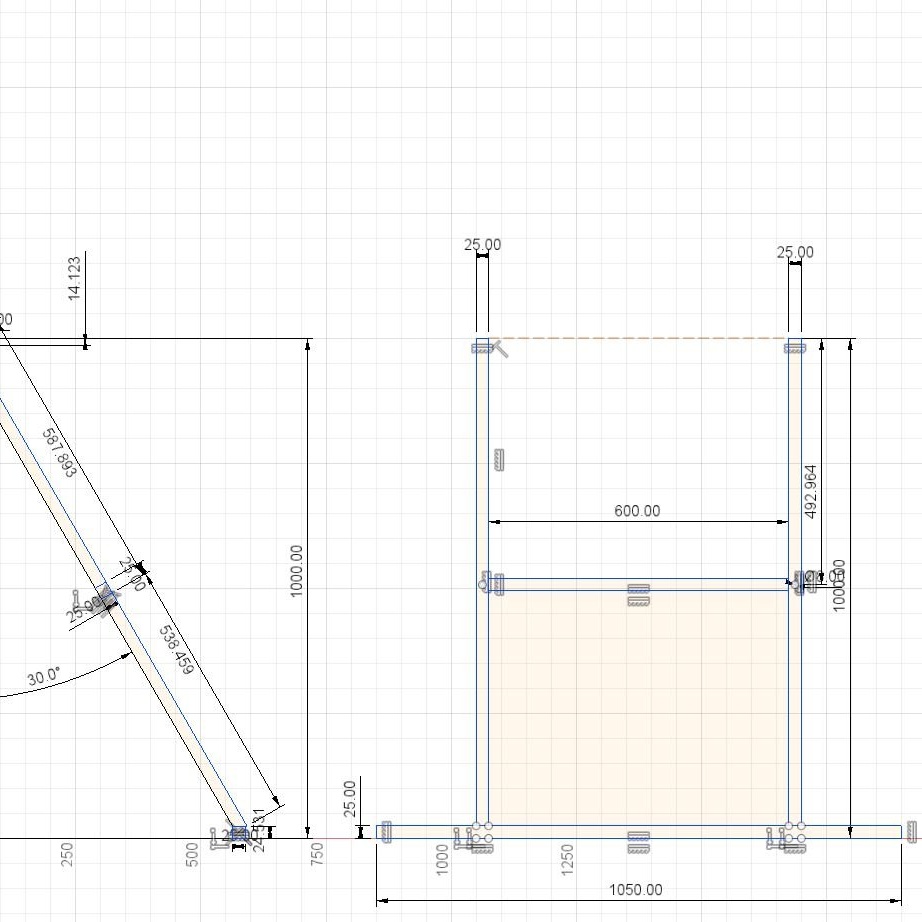
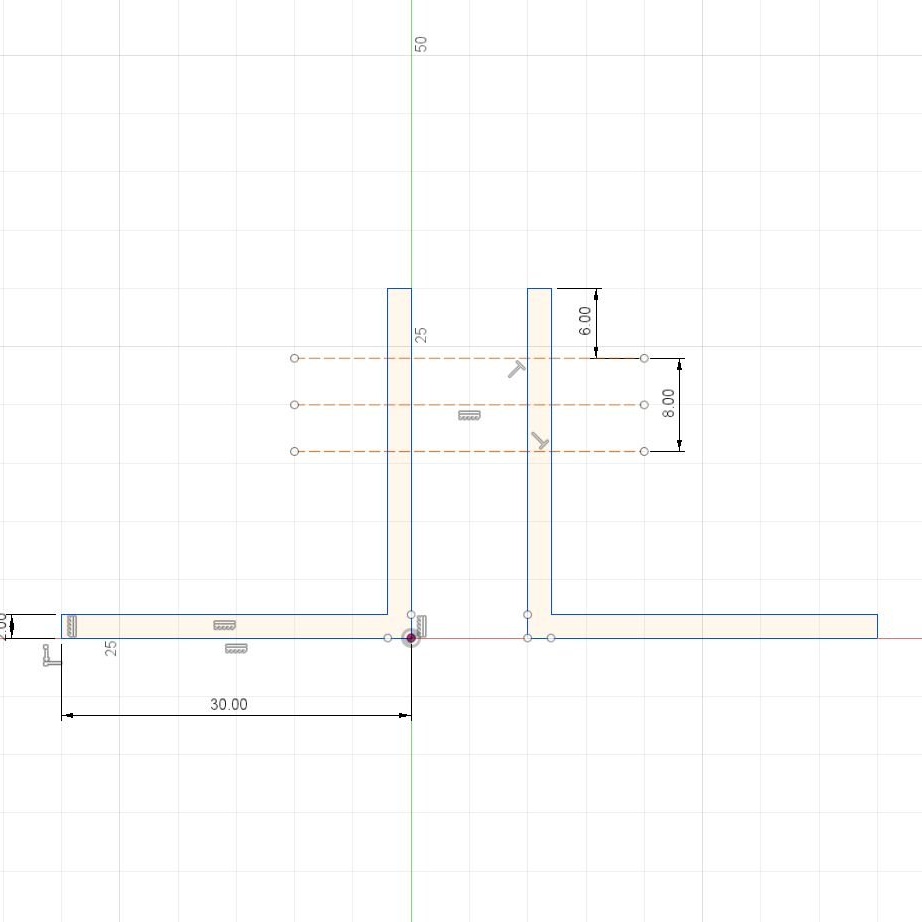
Sestais solis: šasija
Šasija tika izgatavota no alumīnija profiliem 25 x 25 mm un 3 mm biezuma. Visas detaļas tika metinātas, un to izmēri ir redzami fotoattēlā. Ideja bija uzstādīt šasiju no groza 30 grādu leņķī. Lai nesabojātu šasiju, starp tām ir jāvelk atbalsta kabeļi.


Septītais solis: atbalsta profilu atbalstīšana
Pēc motoru uzstādīšanas atbalsta profili sāka saliekties. Tad kapteinis mēģināja iedarbināt motoru un uzzināja, ka profili "staigā". Bija nepieciešams stiprināt dizainu.
Plākšņu pievienošana palielinātu struktūras svaru. Tad meistars nolēma izgatavot V formas dizainu no groza uz leju. Virves ir piestiprinātas tās apakšējai daļai. Pārējie kabeļu gali ir piestiprināti pie stiprinājumiem atbalsta profilu vidū. Kabeļus velk ar pacēlāju. Tādējādi struktūra kļūst stīva.















Astotais solis: izveidojiet savienojumu
Pirmkārt, kapteinis lodē savienotājus vadu galos.


Tad sākas instalēšana. Katram motoram bija jāpārbauda rotācijas virziens. Ja nepieciešams, ir viegli mainīt motora un attiecīgi skrūves griešanās virzienu, apmainot divus no trim vadiem, kas nāk no ESC uz motoru. Pēc tam, kad visi motori bija pareizi pievienoti, vednis veica instalēšanu saskaņā ar ražotāja pievienoto shēmu.
Lidojuma kontrolieri IMU DJI A3 ir ļoti jutīgi pret metālu radītiem traucējumiem, un kapteinis traucējumu dēļ nespēja konfigurēt sistēmu. Tā rezultātā kapteinis aizstāja A3 ar Naza M V2, kuram bija līdzīga savienojuma shēma. Naza M V2 strādāja ļoti uzticami.
Tad vednis savieno baterijas. Katrā nesējprofilā secīgi ir savienotas divas 22,2 V baterijas.



Deviņs solis: Pilota sēdeklis
Sēdeklis tika nošūtas no izturīga auduma. Arī pilotam ir piestiprināta drošības josta, kas piestiprināta pie rāmja, un ķivere.






Desmit solis: pirmais lidojums
Pirms pilota lidojuma ar oktokopteru tika veiktas vairākas pārbaudes ar smilšu maisu un pēc tam ar personas modeli. Lidojuma laikā tika simulētas dažādas situācijas - no vadības zaudēšanas līdz vēja brāzmai.
Pēc visiem testiem pilots beidzot lidoja gaisā.






Pirms lidošanas jums jāveic šādas darbības.
Pārbaudiet skrūvju, kabeļu un motora stiprinājumu hermētiskumu.
Pārbaudiet vadu.
Pārbaudiet, vai skrūves viegli griežas.
Pārliecinieties, vai visi ESC ir izslēgti.
Pārliecinieties, vai visas baterijas ir droši piestiprinātas un uzlādētas.
Pievienojiet strāvu lidojuma kontrolierim inicializēšanai un kalibrēšanai.
Pēc savienojuma ar GPS tas pārslēgsies pilnībā automātiskajā režīmā (Alt. + Att. Hold).
Sēdies pilota sēdvietā un sprādzi uz augšu.
Pievienojiet visas baterijas ESC.
Pievienojiet abas sērijas baterijas (ESC-RB-RB-ESC), izmantojot rezistoru, lai novērstu dzirksteli.
Ieslēdziet motorus, pagriežot slēdzi ieslēgtā stāvoklī.
Izmantojiet kontrolieri, lai vadītu oktokopteru.