

Rakstā tiks apskatīts leģendārā robota ar nosaukumu “Canbot” izveidošanas piemērs. Lielākā daļa robota detaļu tiek izdrukāta uz 3D printera. Robots tiek vadīts no attāluma.
Materiāli un instrumenti mājās gatavots:
- Viens Atmel Attiny85 mikrokontrolleris;
- divi mikropakalpojumi HXT900 vai to analogi;
- viena 3,7 V LiPo baterija;
- viens infrasarkanais uztvērējs 38kHz frekvencē;
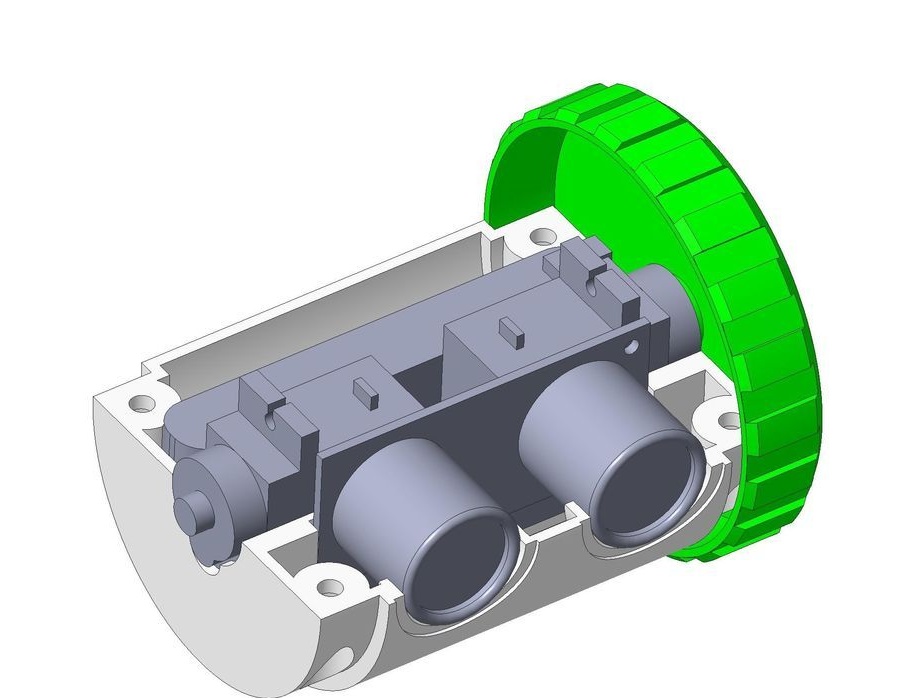
- ultraskaņas pārveidotājs tips HC-SR04;
- 9x4mm slēdzis vai džemperis;
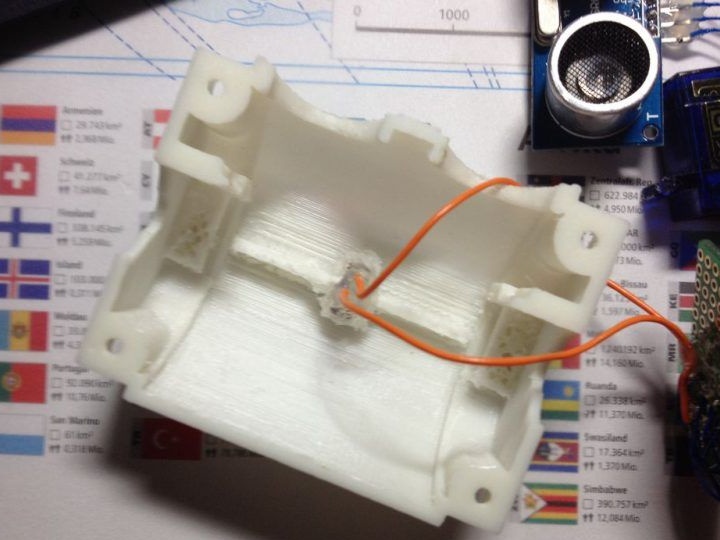
- 3D daļas (iespējams). Tas prasīs vienu augšpusi (top.stl), vienu apakšu (bottom.stl) un divus riteņus (wheel.stl).
Protams, būs nepieciešami lodēšanas instrumenti, karstā līme, skrūvgrieži, skrūves, stieples un citi sīkumi.

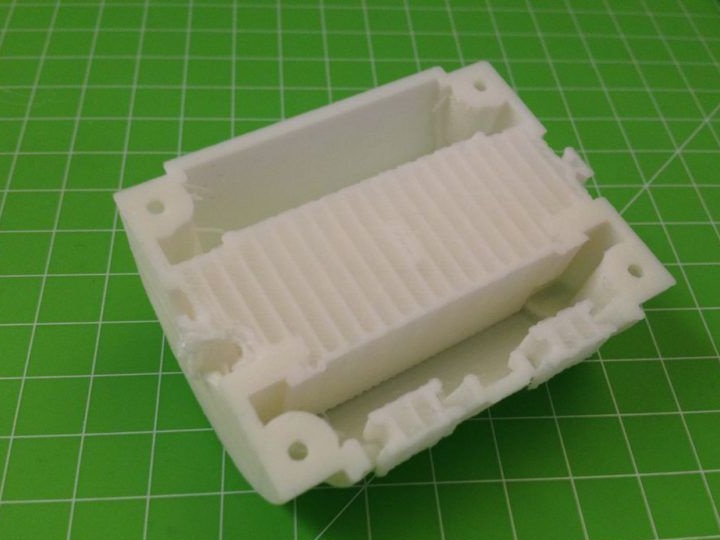
Augšējā un apakšējā daļa būs jāizdrukā līdzenu pusi uz leju, izmantojot opciju “atbalsta struktūras”. Atkarībā no tā, kāda veida printeris tika izmantots, gatavās detaļas beigās var būt jātīra.
Robota ražošanas process:
Pirmais solis. Elektroniska robota daļa
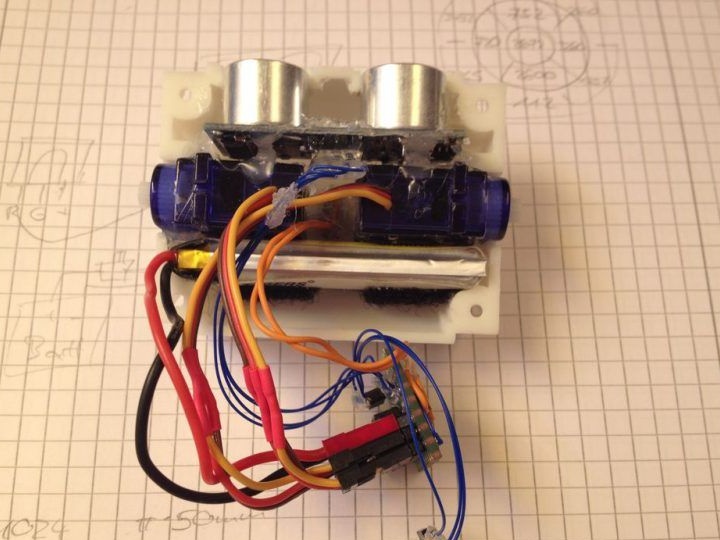
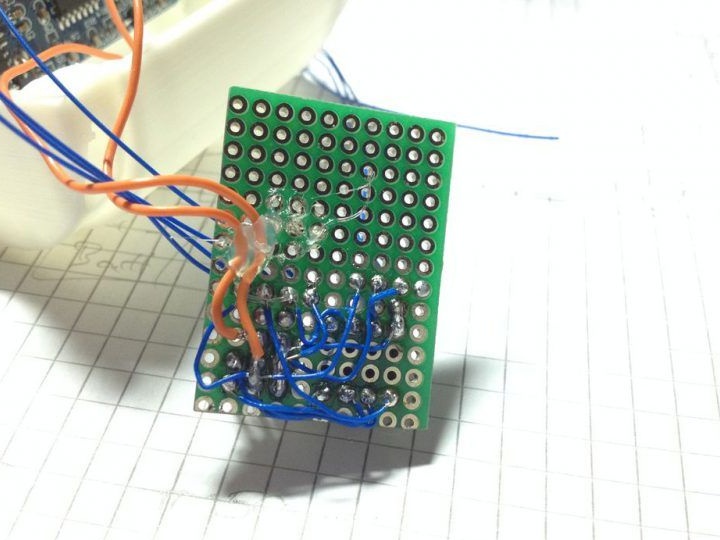
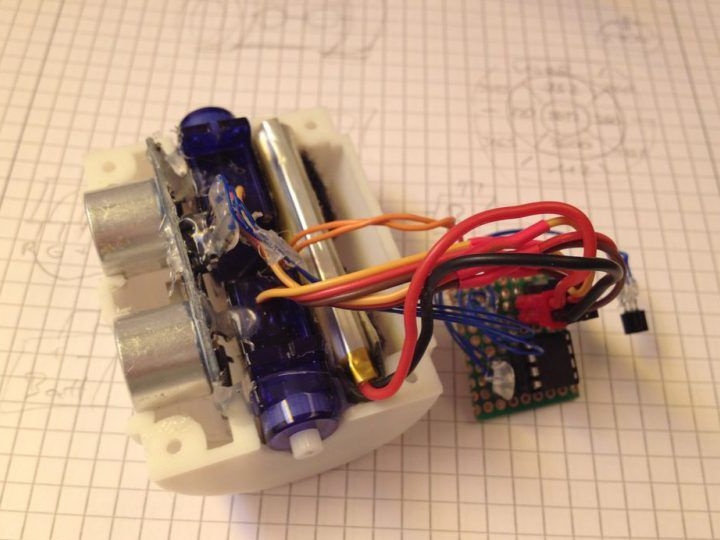
Vispirms jums ir jākonfigurē servo, tie jāpārveido par nepārtrauktu rotāciju. Kā to izdarīt, internetā ir ļoti daudz instrukciju. Tad visi elektroniskie elementi būs jāsamontē, kā norādīts diagrammā. Lai saliktu elektronisko daļu, bija ērti, varat paņemt nelielu maizītes gabalu, kā arī plānus vadus.


Otrais solis Robota programmatūras daļa
Ja tuvojas robota izveidošanas procesam ar visaugstāko profesionalitāti, tad programmatūras daļu var uzrakstīt patstāvīgi. Bet tas jums būs jāapgūst programmēšanas valoda. Vienkāršākā versijā varat lejupielādēt gatavu kodu un vienkārši augšupielādēt to mikrokontrollerā.
Pēc autora domām, labākais robots saņem infrasarkanos signālus no Sony firmas tālvadības pultīm. Nākotnē būs jāpārskata koda daļa Arduino un izvada datus, izmantojot funkciju Serial.print (). Tā rezultātā būs iespējams uzzināt, kāds kodējums ir uz katras pogas.
Trešais solis Pēdējais posms. Salieciet robotu
Nu, noslēgumā robots dodas. Šajos nolūkos jums būs nepieciešama karsta līme. Ar to jums ir jānostiprina vadi tā, lai tie neizkristu, kad robots pārvietojas.Ir arī jānostiprina slēdzis un labi jānostiprina ultraskaņas sensors. Noslēgumā jāsaka, ka robota pārsegi ir savienoti, izmantojot četras skrūves, kā rezultātā vajadzības gadījumā to var viegli izjaukt. Starp citu, skrūves servo ir lieliski piemērotas montāžai.

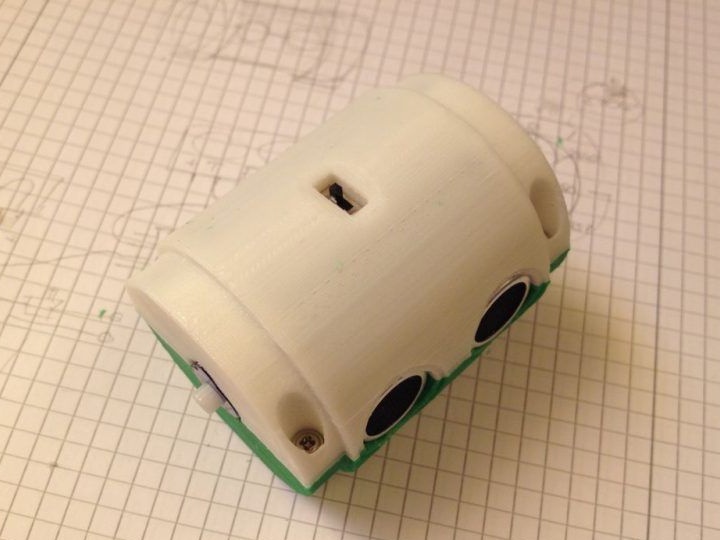
Tas ir viss, tagad robots ir gandrīz gatavs. Atliek uzstādīt riteņus uz servomotora vārpstām, un jūs varat sākt izmēģināt robotu. Detalizētāk varat redzēt, kā darbojas mājās gatavots video.