

Robota darba video
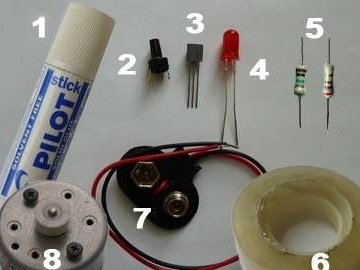
Materiāli un instrumenti robota izveidošanai:
- sausas līmes nūja;
- caurspīdīga lente;
- divu tapu nav fiksēta poga;
- viens mirgojošs LED tips ARL-513URC-B;
- tranzistora tips KP505A;
- divi rezistori ar nominālo vērtību 1M un 270 omi;
- spraudkontakts savienojumam ar "Crown" tipa akumulatoru;
- motora modelis RF-300CA-D / C 3V vai līdzīgs.

Robota funkcionalitāte un raksturojums:
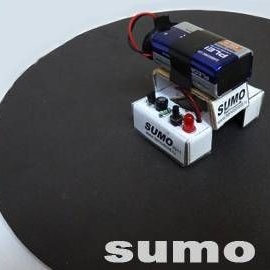
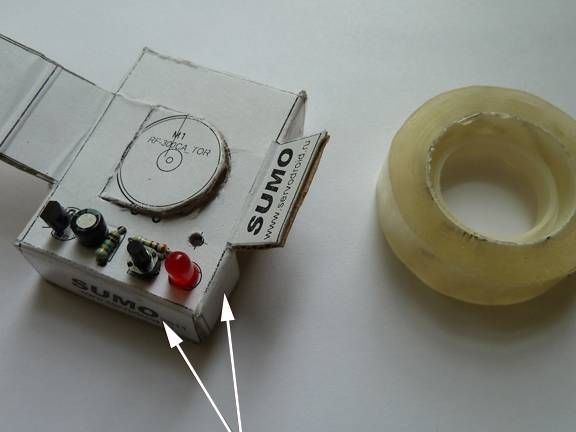
Fotoattēlā var redzēt jau saliktu robots. Lai pārvietotu ierīci, tiek izmantots tikai viens motors, tas ir uzstādīts vertikāli, bet noteiktā leņķī. Pārvietojoties īsā segmentā, robots pārvietojas taisnā līnijā un veido loku uz garāku posmu.
Viena poga tiek izmantota, lai ieslēgtu robotu; kad tas tiek nospiests, robots ieslēdzas uz 20 sekundēm. Pēc tam notiek automātiska izslēgšanās, un robots atrodas gaidīšanas režīmā līdz nākamajai aktivizācijai.
Vēl viena robota īpašība ir tā, ka tas automātiski apstājas pie gredzena malas. Šo nosacījumu var izpildīt, ja pretinieka svars nav mazāks par robota svaru un gredzena biezums nav mazāks par 3 mm.
Šeit kā strāvas avots tiek izmantots 9 voltu akumulators, tas ir uzstādīts uz robota. Pateicoties papildu svaram, robots uzkrāj nepieciešamo kinētisko enerģiju nepieciešamajām darbībām.
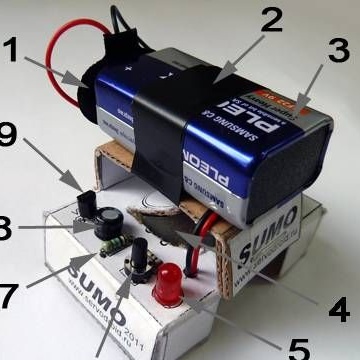
Attēlā robotu komponenti ir apzīmēti ar cipariem:
1. Saspraude akumulatora pievienošanai.
2. Akumulatora aizbīdnis.
3. Barošanas avots (9 V akumulators).
4. Motors.
5. Mirgojoša gaismas diode (norāda, ka strāva ir pievienota).
6. Poga, lai ieslēgtu robotu.
7. Rezistors, pateicoties tam jūs varat iestatīt robota laiku.
8. Kondensators, viņš ir atbildīgs arī par robota laiku.
9. Tranzistora tips KP505A, tas ir motora vadītājs.
Robotu montāžas process:
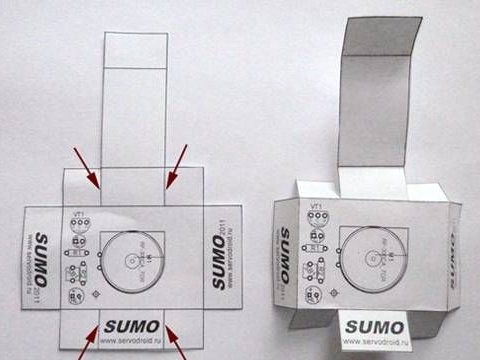
Pirmais solis. Mēs sagatavojam lietu
Lai izgatavotu lietu, autors izmanto gofrētu kartonu, jums saskaņā ar veidni jums jāpieliek kontūra. Veidni var izdrukāt uz printera, tā ir pievienota rakstam. Pēc nepieciešamo kroku izgatavošanas modeli var sagriezt pa biezām līnijām. Lai uzstādītu motoru, jums jāsagriež pusloks kartonā un pēc tam to nedaudz saliekt, kā norādīts fotoattēlā.


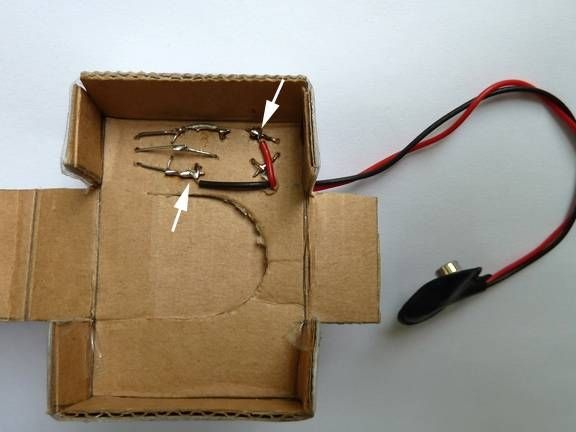
Otrais solis Radioelementu uzstādīšana
Nākamajā posmā jums jāinstalē visi nepieciešamie radioelementi. Lai to izdarītu, jums ir jāpieņem vērps un jāizveido caurumi kartonā, tie jādara apaļās atzīmēs. Lai salabotu komponentus, pēc uzstādīšanas to secinājumiem jābūt nedaudz saliektiem. Jūs varat arī redzēt marķējumu redzamības veidā uz kartona, šeit jums ir jāizveido liels caurums, caur to izies barošanas vads.
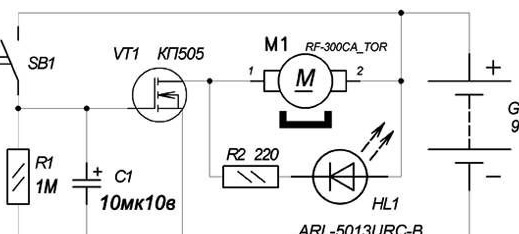
Pēc tam jūs varat ņemt lodāmuru un sākt savienot radio elementu kontaktus saskaņā ar shēmu.





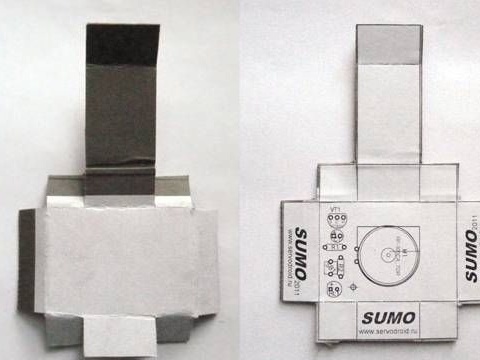
Trešais solis Mēs piestiprinām apakšējās sānu virsmas
Šajā posmā apakšējās sānu virsmas var savienot. Lai to izdarītu, jums ir nepieciešams saliekt apakšējās plaknes un pēc tam nostiprināt ar caurspīdīgu lenti. Arī attēlā var redzēt korpusa elementus noliektus uz augšu, tie nepieciešami akumulatora nostiprināšanai.


Ceturtais solis Pievienojiet perifērijas ierīces
Lai akumulatoram pievienotu strāvu, jāizmanto klipsavienojums. Vads jāpārvada caur caurumu, sarkans ir pielodēts līdz gaismas diodes pozitīvajam kontaktam, bet melns - līdz kondensatora C1 mīnusam.
Tad jums jāsavieno kreisās un labās puses virsmas, kā rezultātā jāiegūst burts "P". Elementu drošai fiksēšanai tiek izmantots stiprinājums no skavotāja. Kronšteinu uzstādīšanas vietu norāda balta bultiņa. Skavas var saspraust ar knaibles.


Piektais solis Uzstādiet un pievienojiet motoru
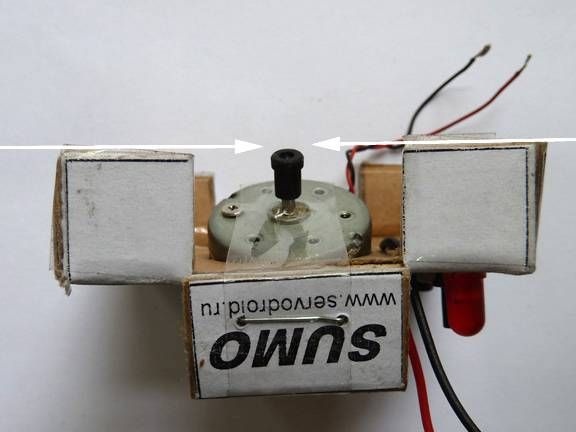
Lai robots varētu pārvietoties taisni, tā vārpstai jābūt noteiktā leņķī pret virsmu. Citiem vārdiem sakot, robots stāvēs uz sānu daļām, un tā vārpsta būs saskarē tikai ar virsmu. Lai robota vārpsta būtu ar labu saķeri, jums uz tās jāpieliek elastīgā josla, tā var būt kambrika vai gumijas aizturis no hēlija pildspalvas.
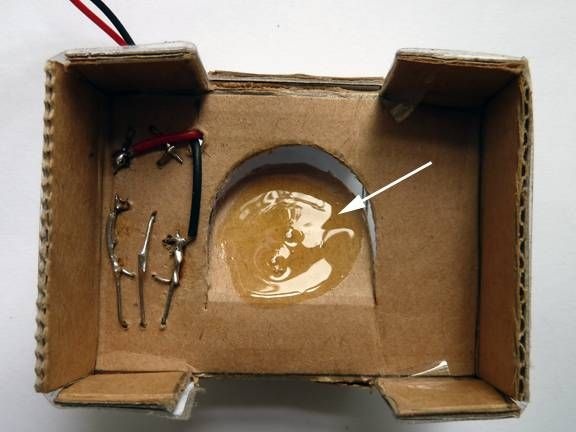
Motors ir uzstādīts uz līmes, eļļošanas vieta ir atzīmēta ar baltu bultu. Pēc līmes uzklāšanas jums mazliet jāgaida, līdz tā kļūst viskoza, pretējā gadījumā šķidrā līme var iekļūt motorā un to sabojāt.
Papildu fiksēšanai motors ir iesaiņots ar lenti.


Runājot par robota leņķi, tas viss ir skaidri redzams attēlos. Pēc uzstādīšanas motors ir jāpievieno. Viena tapa ir savienota ar mīnusu, bet otra - ar tranzistora VT1 aizplūšanu.


Sestais solis Montāžas pēdējais posms
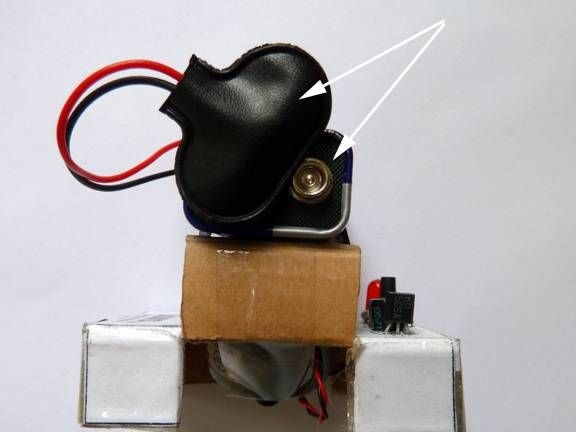
Akumulators ir uzstādīts uz U formas rāmja, akumulators tiek fiksēts, izmantojot elektrisko lenti. Rāmis ir pārdomāts tādā veidā, ka papildus atbalstam tas ir arī akumulatora amortizators. Ja robots ir pilnībā jāatvieno no barošanas avota, jūs varat atvienot vienu vadu no akumulatora.
Noslēgumā jāsaka, ka konkursam jums būs nepieciešams gredzens, tas ir izgatavots divslāņu, ar vismaz 3 mm biezumu. Ja šis nosacījums nav izpildīts, robots nevarēs apstāties pie gredzena malas. Gredzena diametram jābūt 250 mm. Apakšējo slāni veido plāns gofrēts kartons, bet augšējo - no melna plāna kartona. Abi slāņi ir jāsalīmē kopā. Montāža ir beigusies, jūs varat sākt sacensības. Uzvarētājs ir robots, kurš paliek ringā.