

Video varat redzēt, kā robots darbojas. Darbības laikā tā pakāpeniski maina krāsu.

Materiāli un instrumenti robota salikšanai:
- U veida stiprinājuma kronšteini;
- četras 1,5 V LR44 baterijas;
- daudzkrāsains RGB-LED ar pārslēgšanas funkciju;
- izolācijas caurules;
- tērauda spiedpoga;
- zemsprieguma motora tips RF-300CA;
- poga, lai ieslēgtu robotu (ar diviem vadiem);
- vadi motora pievienošanai;
- mirgojoša trauksmes gaismas diode.
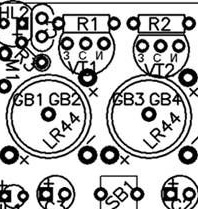

Attiecībā uz nepieciešamo elektroniska elementi, tie ir parādīti attēlā. Iespiestā shēma ir izgatavota no PCB folijas loksnes, tās izmēri ir tikai 30X30 mm. Autore arī iesaka montāžai izmantot mazos polāros kondensatorus.
Robotu ražošanas process
Pirmais solis. Robota shematiska diagramma
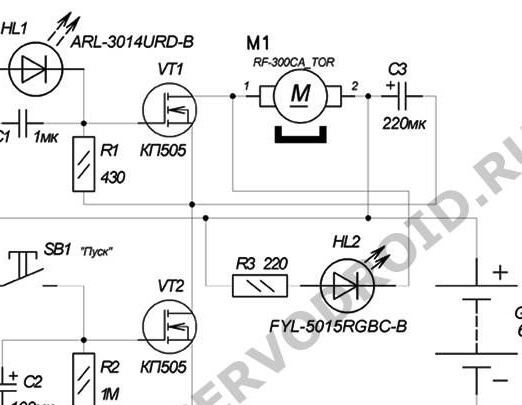
Robota shēma ir redzama attēlā. Pēc akumulatora ievietošanas robots ir izslēgtā stāvoklī, lai to ieslēgtu, nospiediet pogu SB1. Tūlīt pēc tam kondensators C2 tiek nekavējoties uzlādēts. Pozitīvā plāksne no kondensatora ir savienota ar lauka efekta tranzistora VT2 vārtiem. Šajā sakarā, kad tiek sasniegts pārslēgšanas slieksnis, šī kanāla kanalizācijas avota kanāla pretestība uzreiz samazinās un aizplūdes vietā veidojas negatīvs potenciālais lādiņš. Nu, kas notiks tālāk, sīkāk var redzēt diagrammā.
Otrais solis RGB gaismas diode
Gaismas diode zem numura 1 ir uzstādīta uz iespiedshēmas plates. Zīmējumā šo pozīciju sauc par HL2. Pēc gaismas diodes uzstādīšanas tā secinājumiem jābūt saliektiem tā, lai gaismas diode būtu vērsta uz sāniem. Tādējādi darbības laikā LED spīdēs nevis uz augšu, bet uz sāniem, apgaismojot sienas. Kurā virzienā spīdēs gaisma, norāda melna bultiņa.

Trešais solis Piestipriniet akumulatora stiprinājuma kronšteinus
Lai nodrošinātu kontaktu starp akumulatoru un robotu, tiek izmantotas spiedpogas.Viena poga ir uzstādīta centrā, diagrammā tā ir apzīmēta ar GB1, GB2, bet otra ir iestatīta uz pozīciju GB3, GB4. Lai droši nostiprinātu kontaktus, pogas ir pielodētas ar lielu daudzumu lodmetāla.


Baterijas ir uzstādītas uz metāla pogas ar numuru 3. Baterijas tiek fiksētas ar U formas stiprinājumu, uz kura tiek nēsāti cauruļu izolatori. Kronšteina augšējai daļai jābūt nedaudz saliektai ar loku uz leju, tas ļaus baterijas nospiest līdz apakšējam kontaktam. Izolācijas caurules ir vajadzīgas, lai bateriju vertikālās virsmas nesaskartos ar horizontālajām.
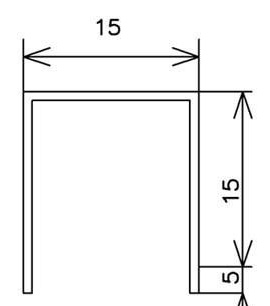
Lai izgatavotu U formas stiprinājumu, jums jāizmanto divi saspraudes. Viņiem jābūt saliektiem U formā, kā norādīts zīmējumā. Var izmantot jebkuras caurules, šeit izmanto polivinilhlorīdu. Viņu augstumam jābūt vienādam ar bateriju augstumu.
Kronšteinu uzstādiet, lodējot, tam jums ir jānoslāpē tā gali. Tinšanai nepieciešams izmantot neitrālu, mazgāšanas līdzekli, kas nemazgā.
Ceturtais solis Uzstādiet motoru
Motors ir uzstādīts tā dēļa pusē, kur iet sliedes, tas atrodas ar vārpstu uz leju. Lai piestiprinātu motoru, varat izmantot karstu līmi vai abpusēju lenti. Bet pirms cieši pievienojat motoru, jums tas jāpieslēdz un jāpārbauda visas sistēmas darbība.

Piektais solis Iestatīšana un testēšana mājās gatavots
Pēc robota salikšanas jūs varat pārbaudīt un konfigurēt. Lai to izdarītu, robotā jāinstalē akumulatori, tie tiek uzstādīti GB1, GB2 un GB3, GB4 vietā. Šajā gadījumā elektronikai jābūt izslēgtā stāvoklī. Pēc akumulatoru ievietošanas robotu var ieslēgt, tas tiek darīts, izmantojot pogu SB1. Pēc tā nospiešanas motoram jāsāk darboties, mirgo HL1 gaismas diode, iedegas arī RGB gaismas diode.
Pēc kāda laika robots automātiski izslēgsies, tas apstāsies un visas diodes izdzisīs. Pēc tam to ieslēdz tāpat kā pirmo reizi, nospiežot pogu.

Lai pielāgotu robota laiku, jums jāeksperimentē ar rezistora R2 un kondensatora C2 vērtībām, viņi ir atbildīgi par šo funkciju. Ja jums jāiestata maksimālā robota darbība, tad kondensatora kapacitātei jābūt pēc iespējas lielākai. Tik vienkāršā veidā jūs varat salikt tik interesantu robotu.