
BIBOT-1 robota īpatnība ir tā, ka tas var veikt divus uzdevumus. Tas var pārvietoties aiz gaismas avota vai pa melnu līniju, ko var uzzīmēt uz papīra. Robots iestatījumos ir ļoti elastīgs, tas ir, vēlāk to var pielāgot jebkuriem vēlamajiem apstākļiem, tas ir, padarīt to jutīgāku pret gaismu vai mazāku. Ir iespējams arī pielāgot motoru griešanās ātrumu, tas ļaus robotam darboties labāk, īpaši pārvietojoties pa līniju.

Ierīce un robota darbības princips:
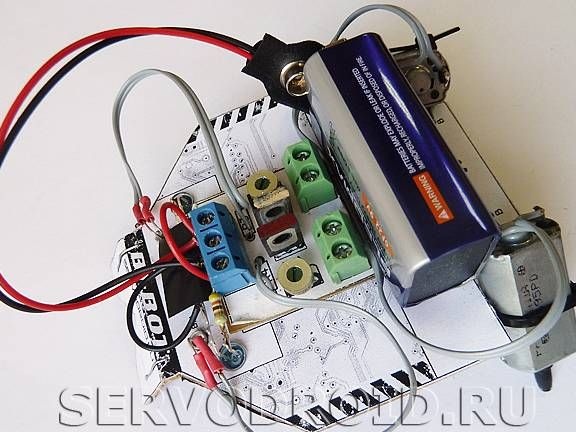
Robota pamatne ir izgatavota no kartona, veidne tiek izdrukāta uz printera un pēc tam avarē. Attiecībā uz radiokomponentu moduli par pamatu tika ņemts tekstolīts, modulis ir piestiprināts pie robota pamatnes. Lai padarītu ķermeni stingrāku, dizainā tiek izmantotas īpašas ribas.
Dzinēji ir uzstādīti tāpat kā vairumā no tiem mājās gatavots, tas ir, leņķī. Sakarā ar to nav nepieciešams likt riteņus un pārnesumkārbu. Lai vārpstas neslīdētu virs virsmas, tām tiek uzlikti aizsargi.
Kā barošanas avots tiek izmantota 9 V tipa 6F22 baterija. Akumulators ir piestiprināts ar lenti un vienmēr ir pieejams, lai to viegli nomainītu.
Tad attiecībā uz slēdzi auto nolēma izvairīties no tā instalēšanas. Robots ieslēdzas un izslēdzas, manipulējot ar skavu, kas piestiprinās pie akumulatora.
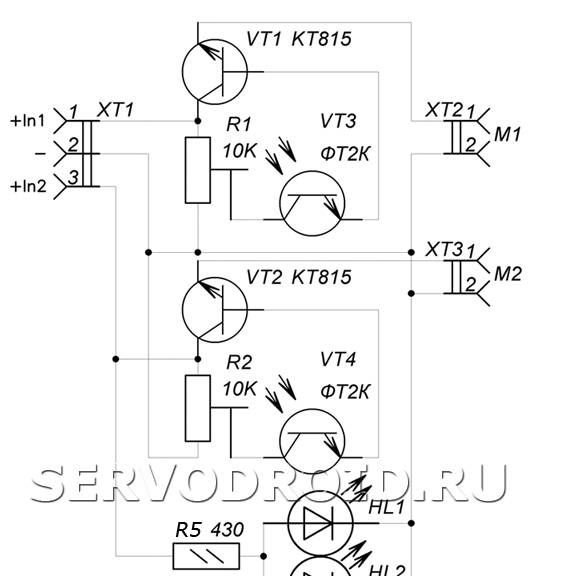
Un visbeidzot - robota pielāgošana. Lai pielāgotu robota jutīgumu, sistēmai ir divi regulēšanas rezistori. Kad tie rotē, jūs varat pielāgot robota jutīgumu pret gaismu, kā arī varat pielāgot arī motoru griešanās ātrumu. Jo jutīgāks robots ir pret gaismu, jo ātrāk tas kustēsies, un otrādi.
Runājot par darbības principu, viss ir norādīts diagrammā.
Materiāli un instrumenti:
- 9 V akumulators un skava savienošanai;
- divi savienotāji motoru savienošanai (divu sekciju spaiļu bloki);
- motori;
- neilona klona;
- aizsargs (gumijas veltnis);
- divi fototransistori;
- divas infrasarkanās gaismas diodes;
- kronšteins no skavotāja;
- trīs sekciju spaiļu bloks barošanas avota pieslēgšanai;
tuning rezistors -.

Ražošanas process:
Pirmais solis. PCB dizains
Maksa tiek veidota, izmantojot LUT metodi. Pirms darba stiklplasta virsma ir rūpīgi jānotīra, pēc tam jānomazgā un rūpīgi jāizžāvē. Pēc izgatavošanas vadošās sliedes jāpārbauda ar multimetru, vai nav īssavienojuma.
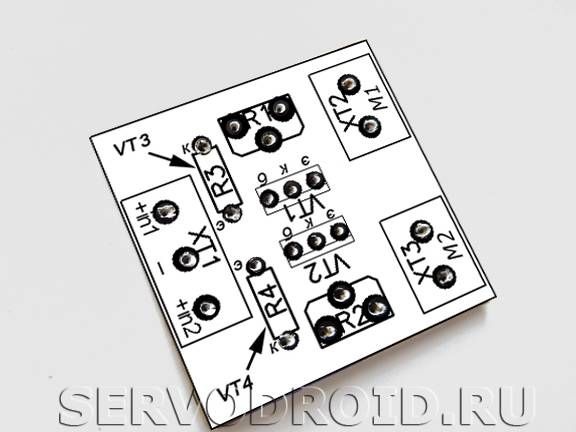
Otrais solis Uzstādīšana elektroniska elementi
Tālāk jums jāņem zīmējums, kas iespiests uz papīra, un jāpielīmē tas izveidotajā tāfelē. Šajā gadījumā caurumiem uz papīra un PCB ir precīzi jāsakrīt. Pēc tam radio komponenti tiek uzstādīti, kā norādīts diagrammā. Darba procesā rezistoru R3, R4 uzstādīšanai nepieciešams uzstādīt fototransistorus VT3, VT4.
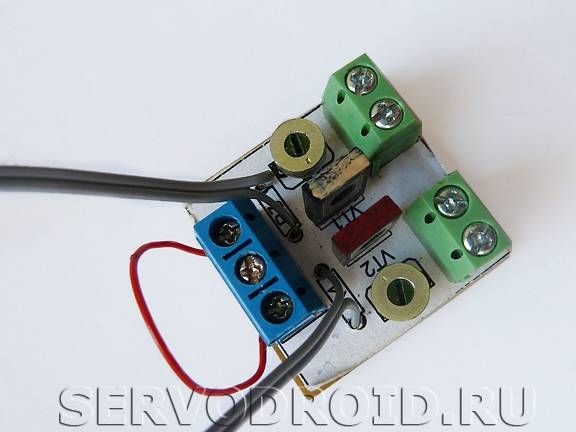
Trīs sekciju spaiļu bloka XT1 galējās sekcijas jāsavieno ar montāžas vadu. Kontaktu savienojuma vietām jābūt labi izolētām, šajos nolūkos vislabāk ir izmantot karstuma saraušanās cauruli.
Trešais solis Kā izveidot lietu
Korpusa rasējums ir jāizdrukā uz parastas A4 formāta papīra lapas. Tālāk jums jāņem gofrētā kartona gabals un uz tā jāpielīmē zīmējums, pēc tam lieta jāapgriež pa perimetru.
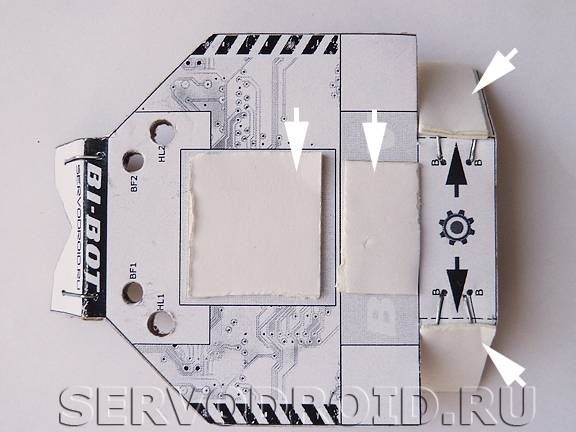
Vietās, kur piktogramma "šķēres" atrodas gar treknām līnijām, ir jāveic iegriezumi. Pēc tam gar melnām punktētām līnijām jums ir nepieciešams saliekt kartonu, kā fotoattēlā, un ievietot melnās bultiņas.



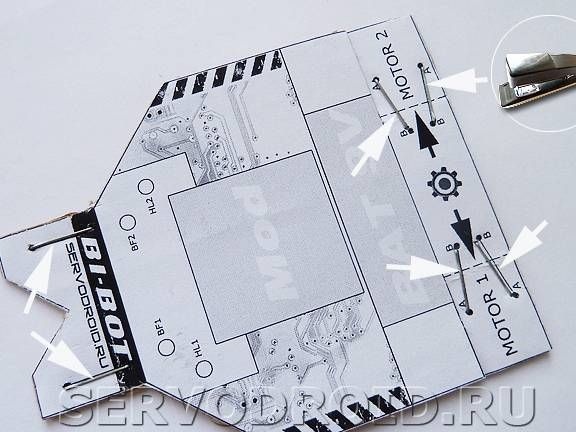


Korpusa priekšpusē un aizmugurē, izmantojot skavotāju, norādītajā stāvoklī, jums jāinstalē kronšteini. To uzstādīšanas vietas ir apzīmētas ar melnām līnijām ar apļiem. Skavas ir vajadzīgas, lai rāmis būtu stingrāks. Pēc iekavu uzstādīšanas tie ir garlaicīgi saliekties gar salocīšanas līnijām.
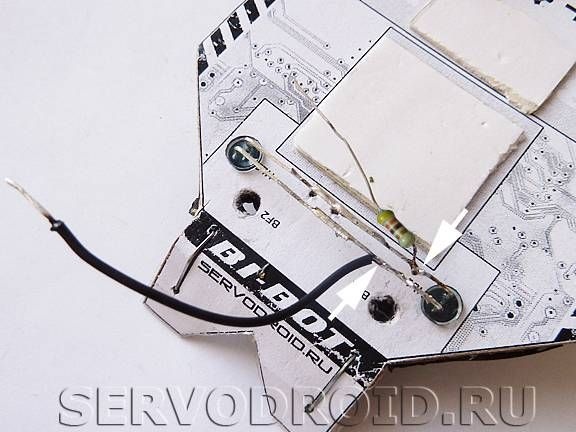
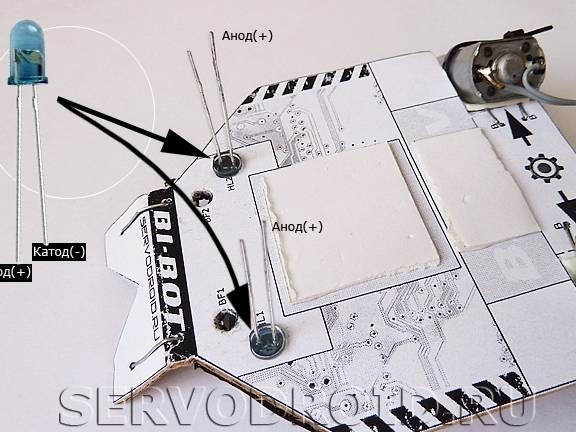
Vietās, kas apzīmētas ar BF1, BF2, jums ir jāizveido caurumi fototransistoru uzstādīšanai. Vietās HL1, HL2 jums jāizveido tāda izmēra caurumi, lai tie atbilstu infrasarkano gaismas diožu korpusa diametram.
Vietās, kas apzīmētas kā Mod "," BAT 9V "un" MOTOR 1 "," MOTOR 2 "pielīmējiet abpusējās lentes sloksnes.
Ceturtais solis Motoru uzstādīšana
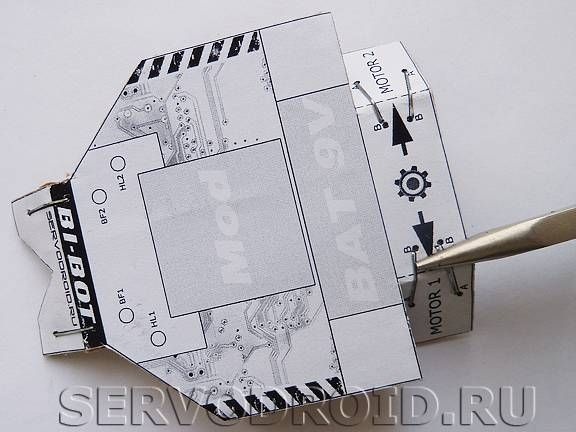
Motori ir uzstādīti pozīcijā ar neilona saitēm. Lai vārpstas neslīdētu, tās jāvalkā ar aizsargiem. Tie ir izgatavoti no gumijas lentēm, kuras atrodas pildspalvu hēlija stieņos. Tajā pašā posmā pielodējiet vadus motoriem.


Piektais solis Infrasarkano gaismas diožu uzstādīšana
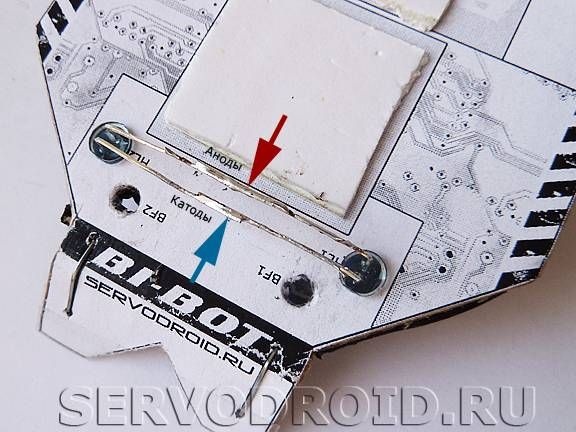
Instalējot infrasarkanās gaismas diodes, ir svarīgi nejaukt to secinājumus, importētiem elementiem garš kontakts ir anods, tas ir, plus. Gaismas diodes ir uzstādītas pozīcijās HL1, HL2, kā parādīts fotoattēlā. Rezultāti ir saliekti tā, lai diodes varētu savienot paralēli.
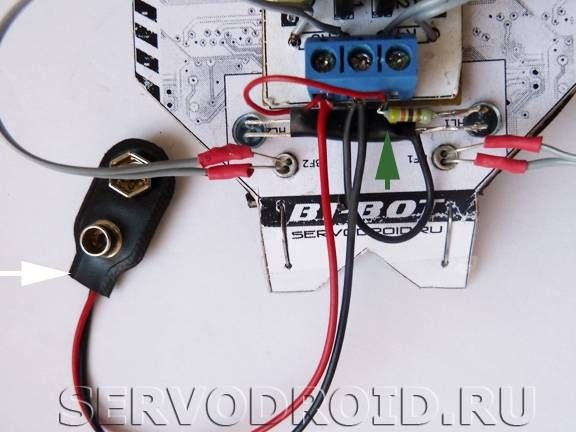
Rezultāts 430 omi jāpielodē līdz gaismas diožu pozitīvajam kontaktam, un melns vads - pie negatīvā kontakta.
Melnā vada otram galam jābūt savienotam ar trīs sekciju spaiļu bloka centrālo tapu. Kas attiecas uz rezistora izeju, tas ir savienots ar spaiļu bloka spaili.
Sestais solis Pēdējā būvēšanas fāze
Lai robots varētu pārvietoties pa līniju, fototransistori ir ievietoti vietās BF1, BF2 tāpat kā fotoattēlā.
Tranzistori kustībai aiz gaismas avota ir novietoti aizmugurē.
Noslēgumā jāsaka, ka motori ir savienoti, un akumulators ir ielikts.


Tas ir viss, robots ir gatavs. Tagad jūs varat mēģināt to iespējot un konfigurēt nepieciešamajos apstākļos.