
Šis robots kontrolē ar Bluetooth viedtālruni. Viedtālruņa akselerometrs mēra tālruņa leņķi pa kreisi / pa labi, uz augšu / uz leju, izmanto šos datus virziena motoru ātruma aprēķināšanai, dati tiek pārsūtīti caur Bluetooth uz Arduino
Kas jums nepieciešams, lai izveidotu robotu.
Arduino uno, HC-06 Bluetooth modulis, divi 300 RPM 12v pārnesumu motori, H-bridge L298N Dual H Bridge motora kontrolieris
12 līdz 1,3 Svina skābes akumulators. Katrs motors patērē 0,4A, kā arī vadītāja loģikas patēriņu. Arduino vadi, parastās 9v baterijas un savienotājs akumulatora pievienošanai Arduino. Elektriskie vadi elektromotoru vadītāju savienošanai. USB kabelis. Tālrunis ar Android versiju 4 un jaunāku. 4 grozāmie 50 mm gumijas riteņi no Screwfix vai Toolstation; divi universālie rumbas Lynxmotion HUB-02.










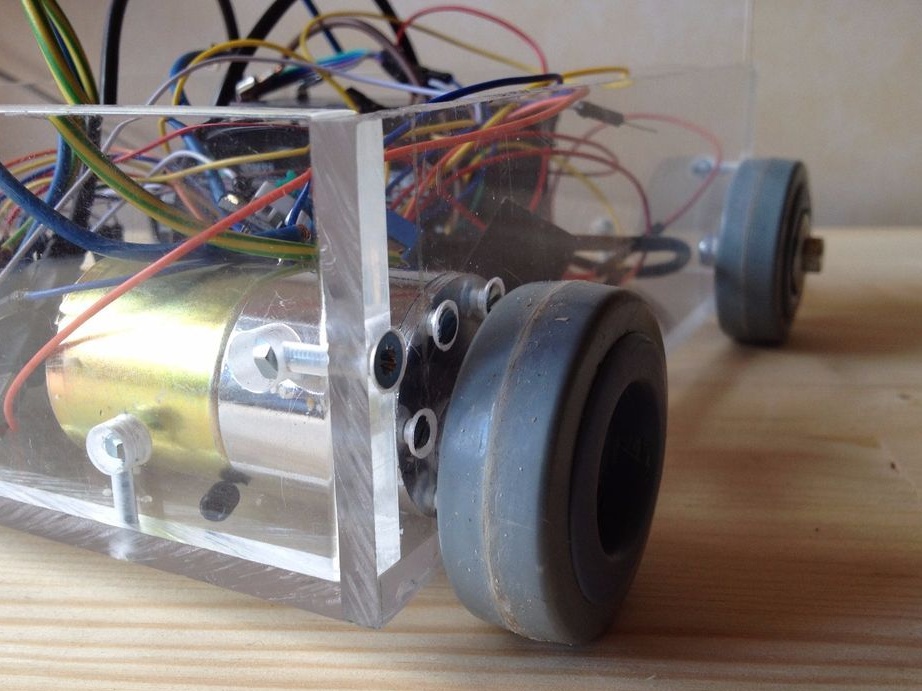
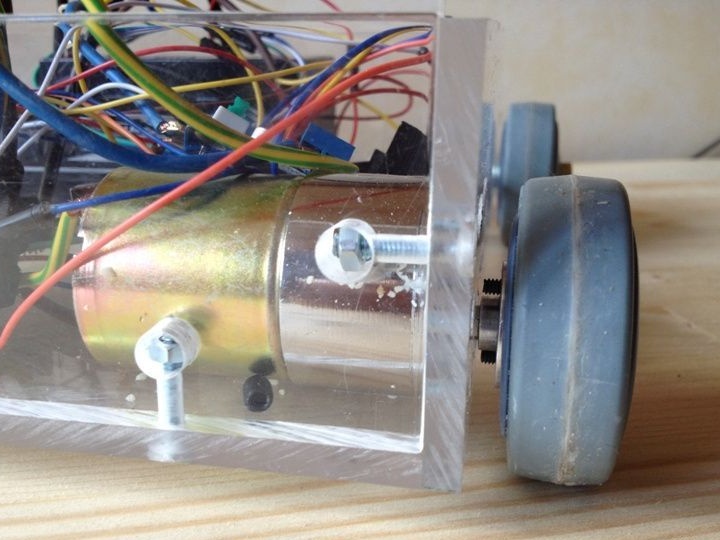
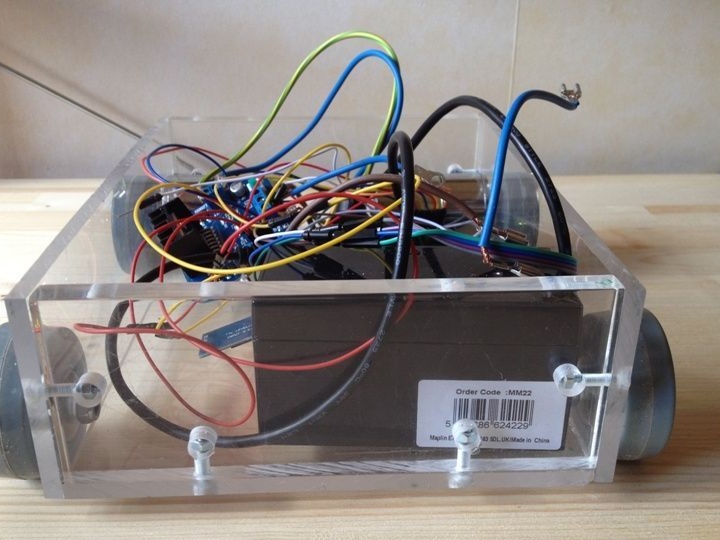
Korpuss ir samontēts no 22 cm garas un 17 cm platas plastmasas. Diviem motoriem jābūt savienotiem ar vārpstu un jānostiprina ar vītņotu tapu.
Priekšējie riteņi
Gumija tiek noņemta no veltņiem, un tajās tiek urbti divi caurumi atbilstoši rumbas caurumiem. Rumbas ir nostiprinātas uz asīm, kas iet caur korpusu, ar vītņotiem tapām. Pēc tam veltņi tiek fiksēti uz rumbām, un uz tiem tiek uzlikta gumija.
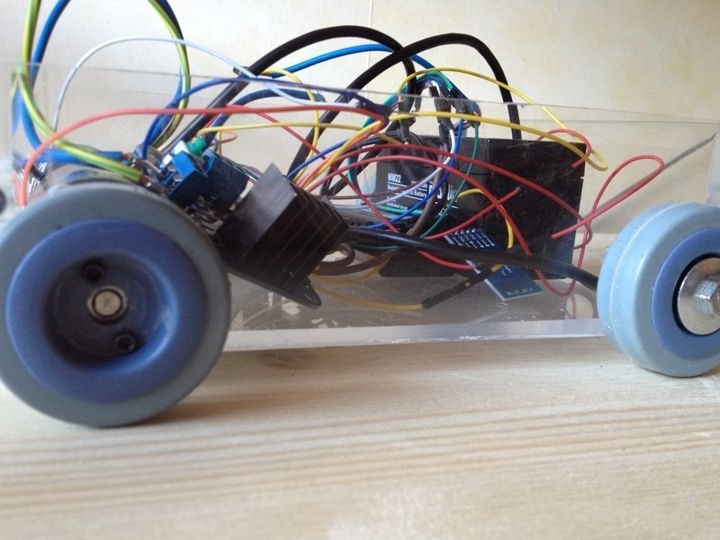
Aizmugurējie riteņi
Aizmugurējos riteņus vienkārši atskrūvē no eņģes un nostiprina caur caurumiem, kas urbti korpusā.
Elektriskie savienojumi.
Ielādējot programmas kodu Arduino, radīsies problēmas. Tas ir saistīts ar faktu, ka Bluetooth modulis, tā RX \ TX kontakti, ir savienoti ar Arduino tapām 1 un 2, kuras tiek izmantotas arī datu pārsūtīšanai, izmantojot USB. Pievienotajā bibliotēkā ir jāmaina kontakti 1 un 2 uz 11 un 12, kas tiks izmantoti datu pārsūtīšanai.
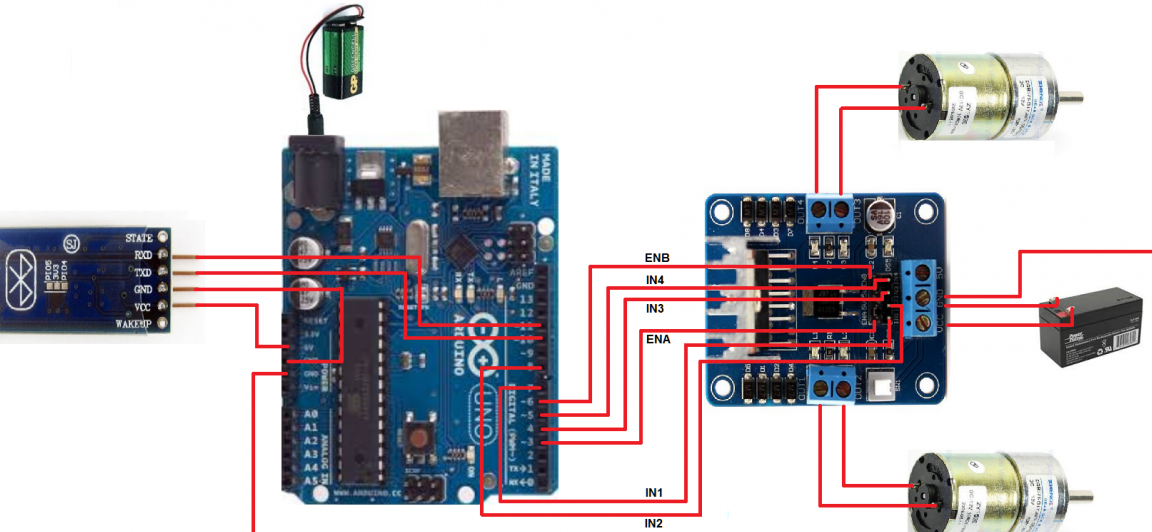
Motora vadītājam loģikai nav nepieciešams atsevišķs barošanas avots. 12 V ir pietiekami, lai darbinātu vadītāja loģiku un pašu motoru. Akumulatora mīnusiem jābūt savienotiem gan ar Arduino, gan ar motora vadītāju. ECA / 5V un ENB / 5V motora vadītāja kontaktus var pārlēkt. Pirms pieslēgšanas Arduino tas ir jānoņem. Nekas nedrīkst būt savienots ar diviem 5 V tapām.
Android kods.
Pievienotais fails ir jāizpako un jāimportē Android Studio, iesaiņojiet to apk un instalējiet tālrunī.
Galvenie faili:
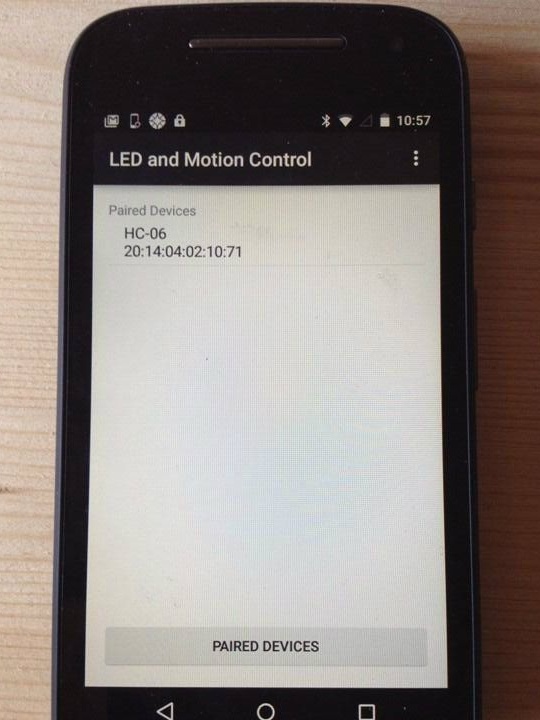
Pārī savienoto ierīču darbība:
ierīceList.java
aktivitāte_ierīču_saraksts.xml
LED un kustības vadības darbība:
ledControl.java
activity_led_control.xml
Manifests:
AndroidManifest.xml
Pārī savienoto ierīču darbība parāda pieejamās Bluetooth ierīces. Tiklīdz ierīces ir savienotas, vadība tiek pārsūtīta uz LED un kustības vadības darbību.
Ieslēgšanas / izslēgšanas pogas nosūta “ieslēgts” vai “izslēgts” ziņojumu Arduino, ieslēdzot vai izslēdzot iebūvēto gaismas diodi. Tālruņa akselerometrs, kas pārraida x / y vērtības no sensora, katru reizi mainoties šīm vērtībām, kontrolē kustību. Balstoties uz to, Arduino aprēķina motoru ātrumu un griešanās virzienu diapazonā no 0 līdz 255. Tas pārraida šīs Arduino vērtības formā “L-255:” vai “R100” utt. Balstoties uz to, Arduino nosūta kreisā motora griešanās ātruma komandas ENA, labo pusi - ENB un maina griešanās virzienu, mainot polaritāti uz IN1, IN2 pa kreisi, N3 un N4 labajam motoram.