
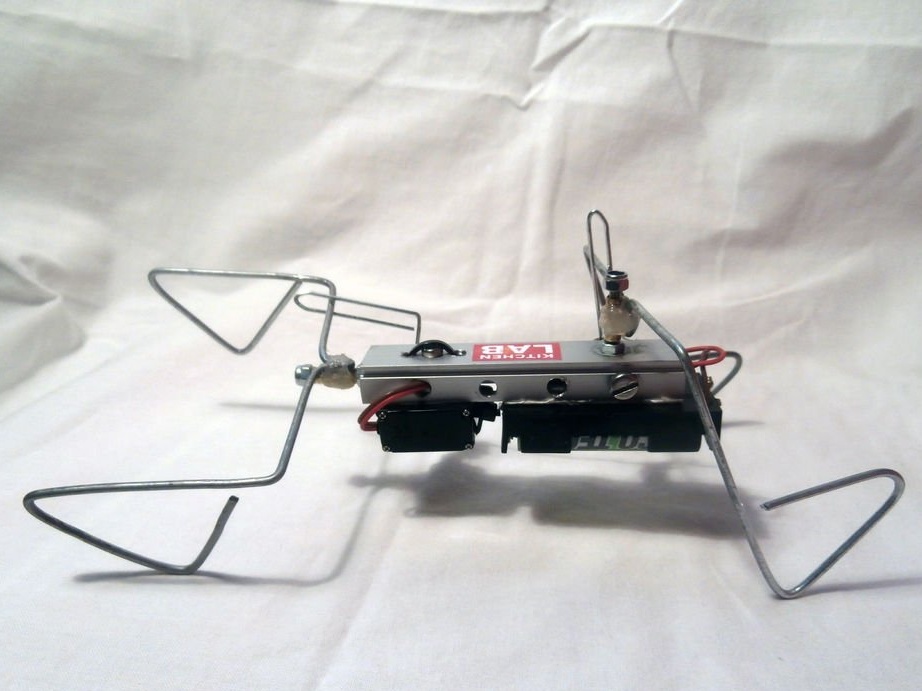
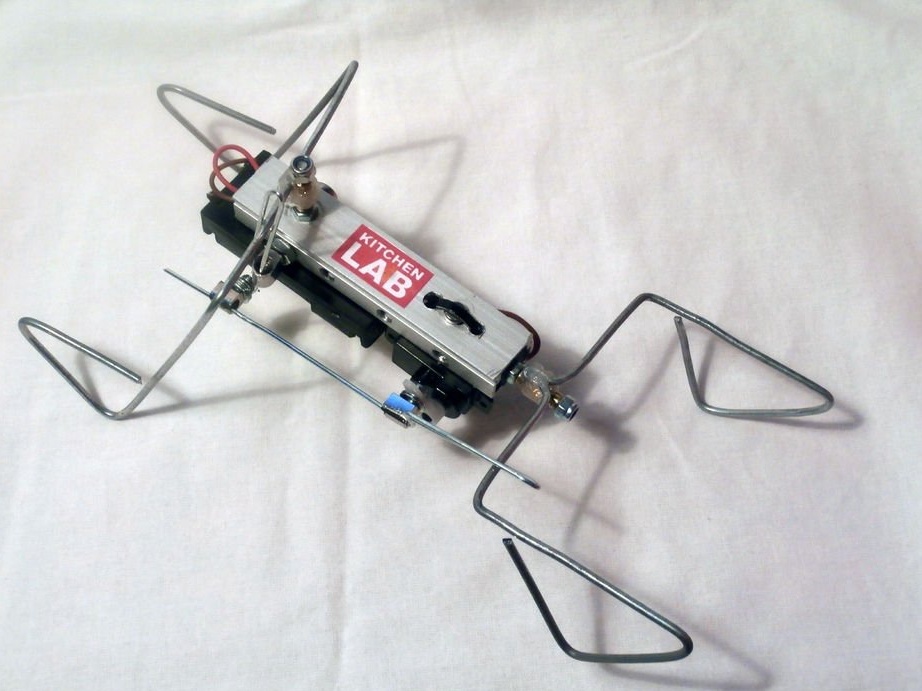
Sveiki visiem! Mani iedvesmoja izveidot savu BEAM robotu, jo es internetā esmu pietiekami daudz redzējis šos robotikas brīnumus ar vienu dzinēju un divmotoriem. Ideja bija izveidot staigājošu robotu, kas staigā tāpat kā ar 1- vai 2-motoru BEAM gājējiem. Pēc vairākiem neveiksmīgiem eksperimentiem es izdarīju to, ko vēlējos!
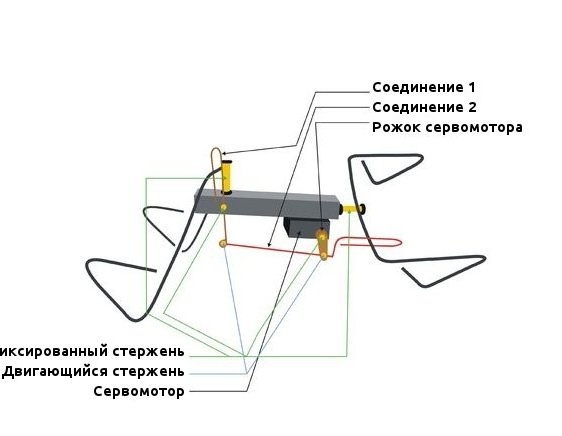
1. solis: Mehānisms
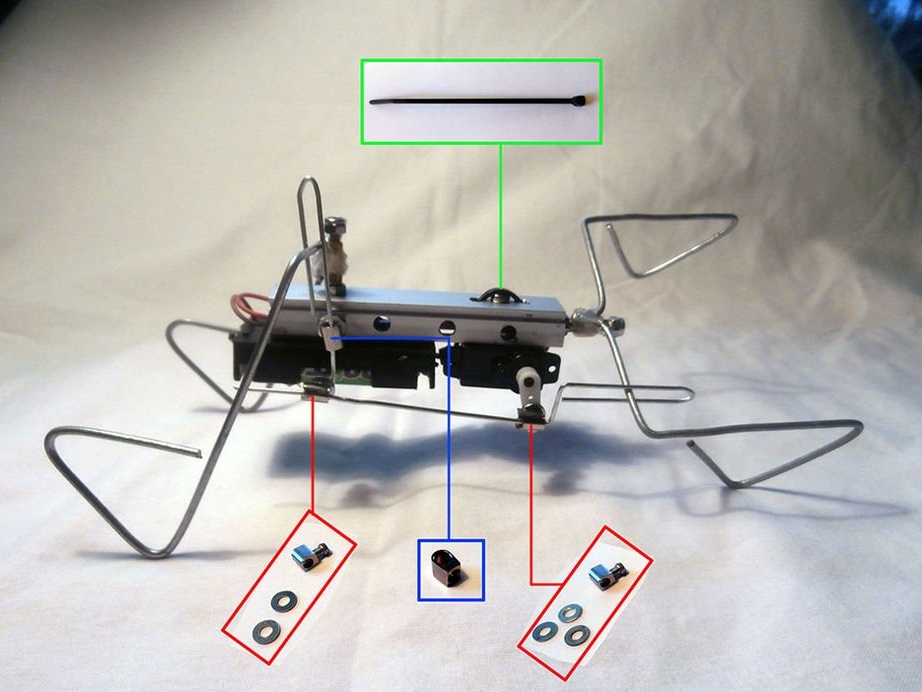
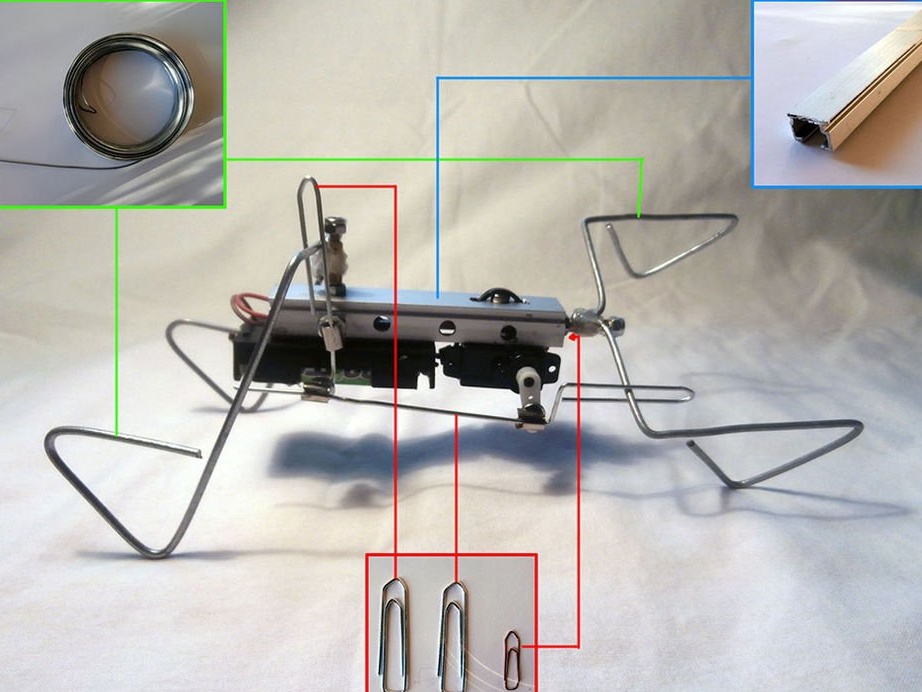
2. solis: nepieciešamās daļas

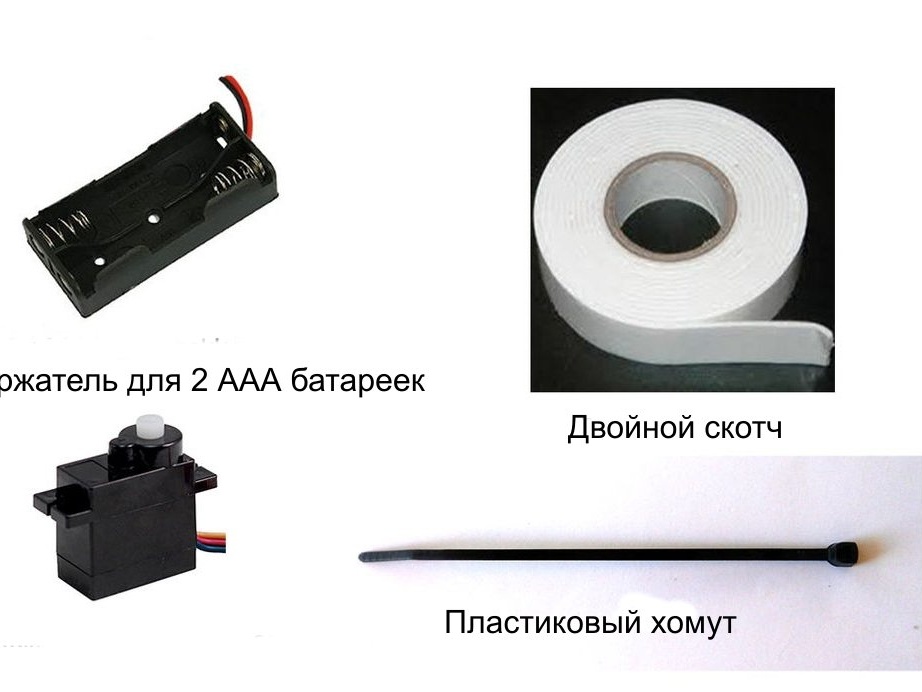



(1x) nepārtrauktas rotācijas servo
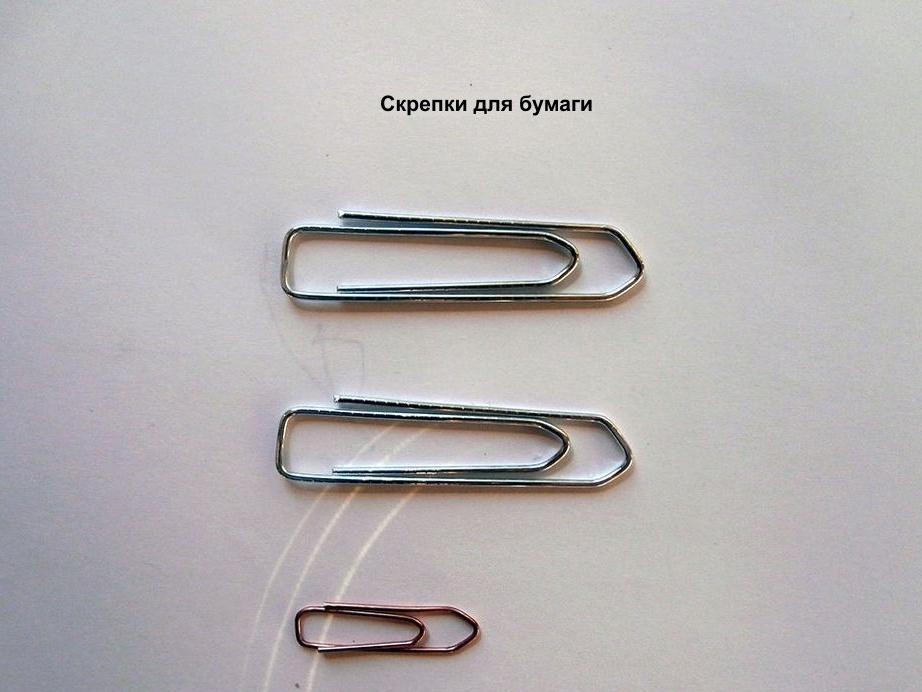
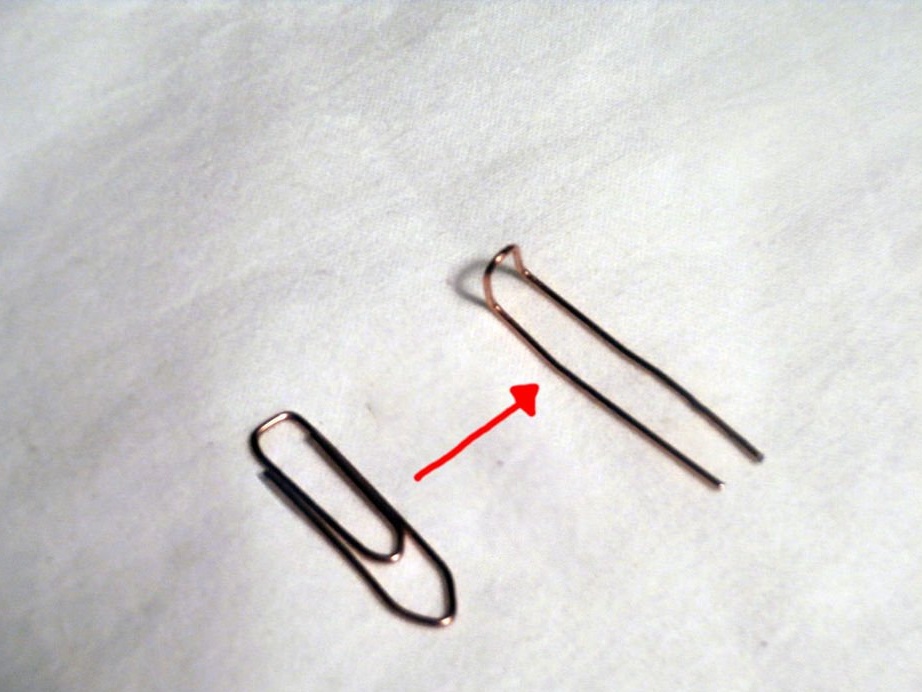
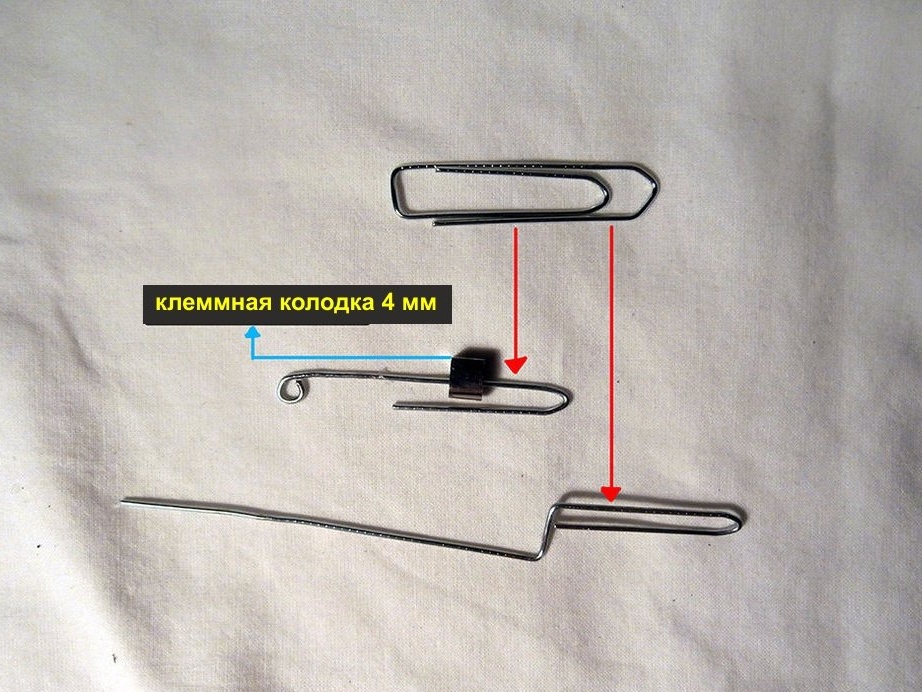
(2x) lieli saspraudes
(1x) mazs saspraude
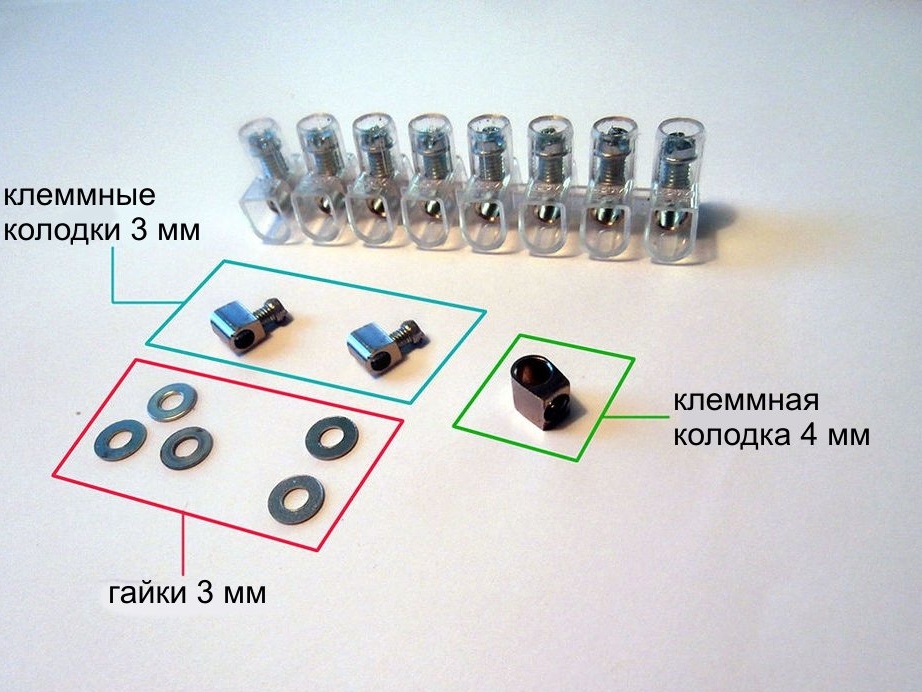
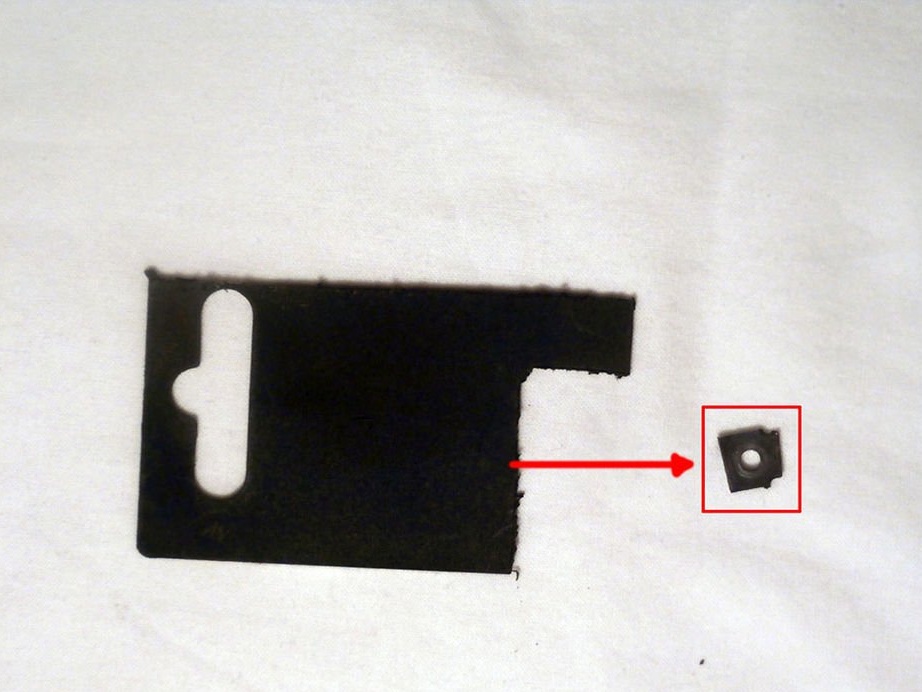
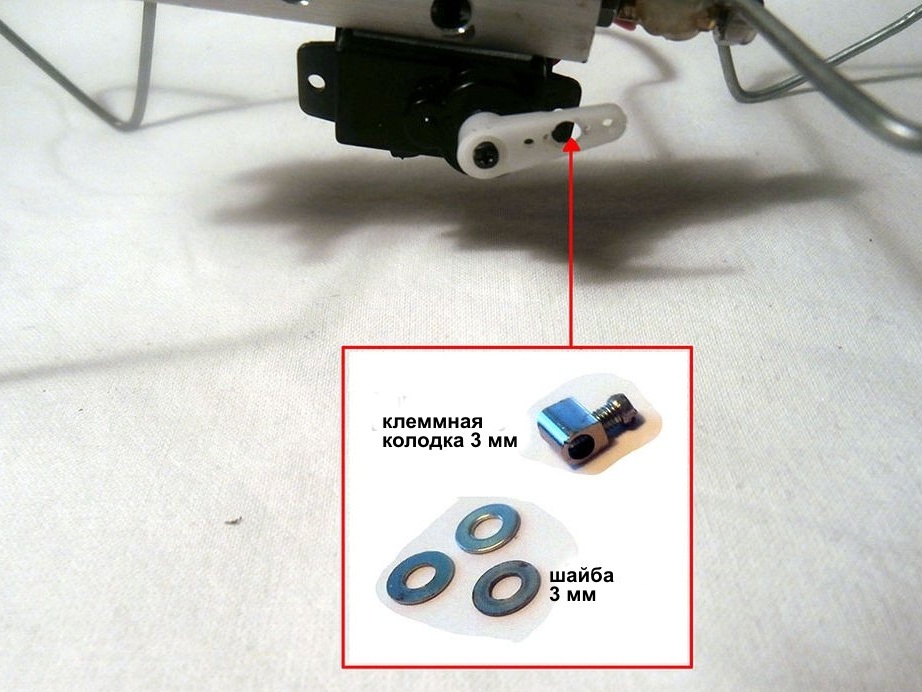
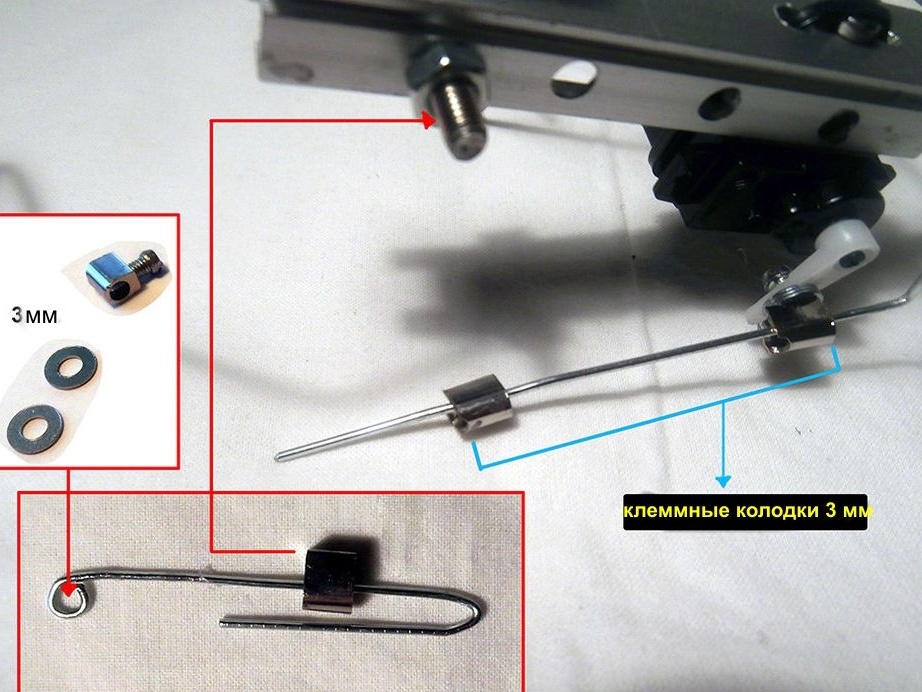
(2x) spaiļu bloki (3mm)
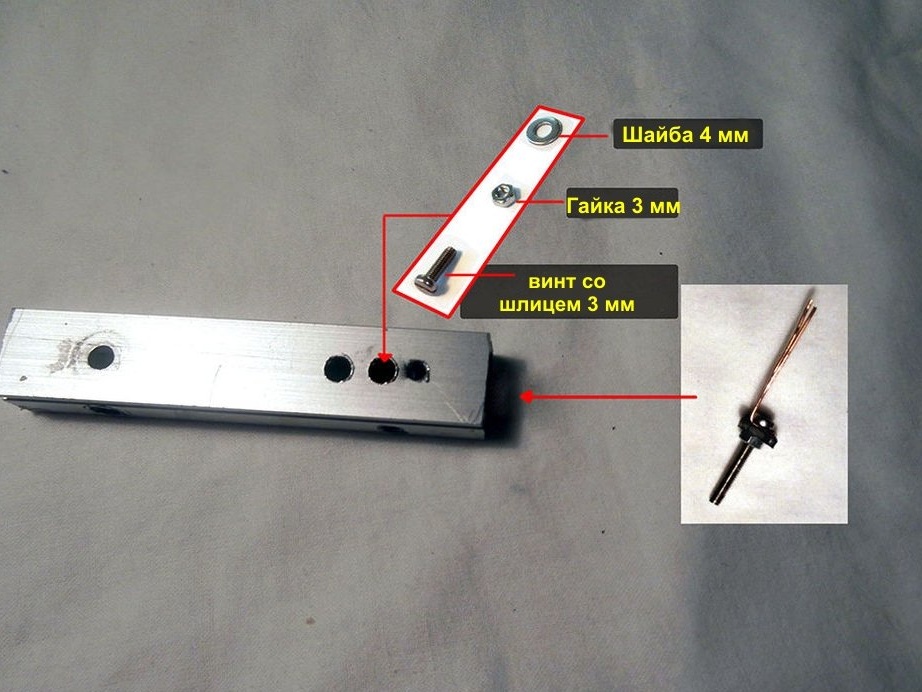
(1x) spaiļu bloki (4mm)
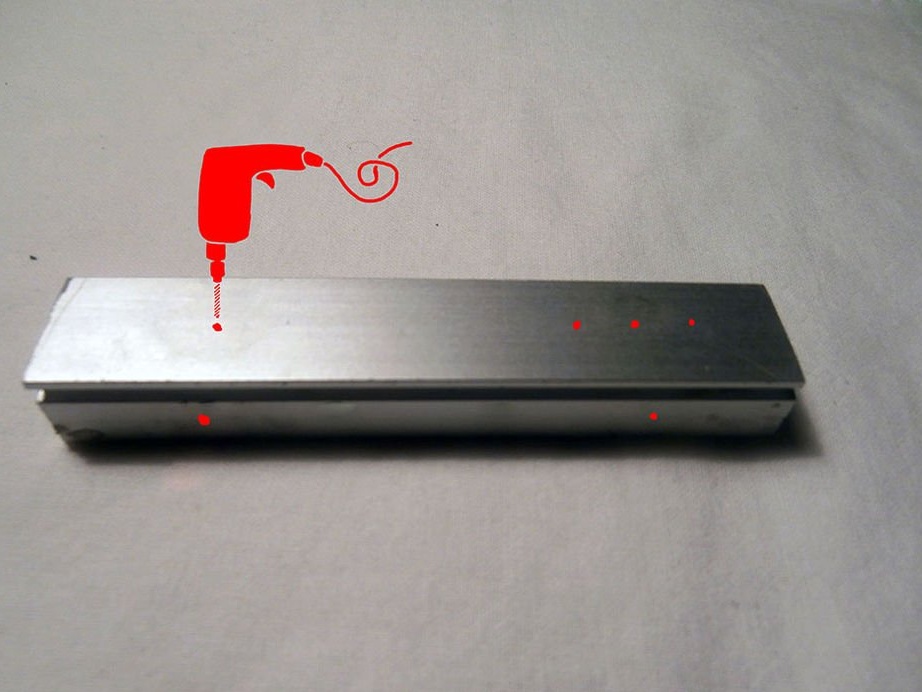
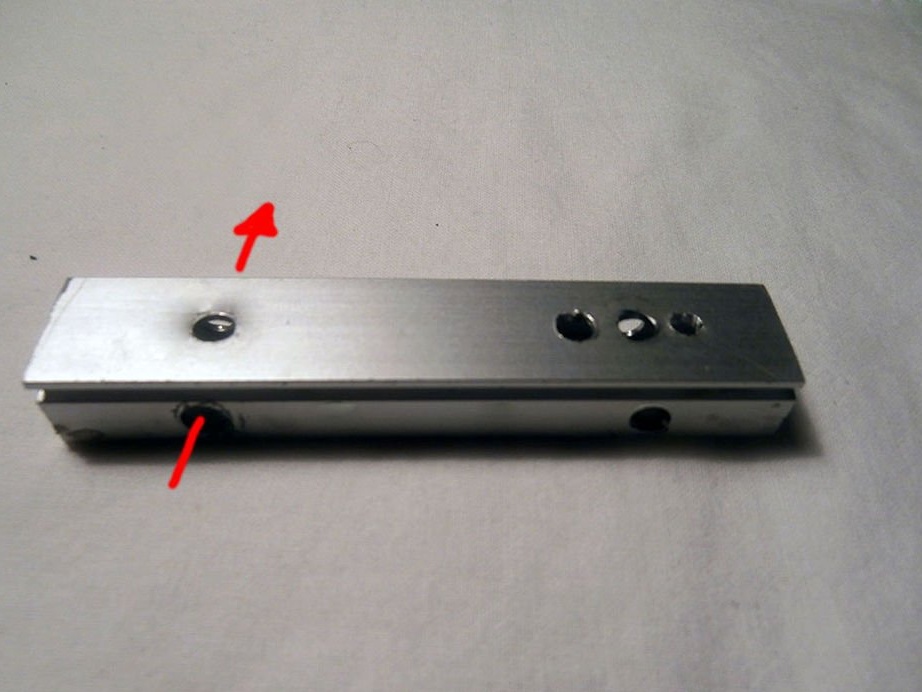
(1X) Lietots alumīnija profila bloks
(1X) plastmasas gabals
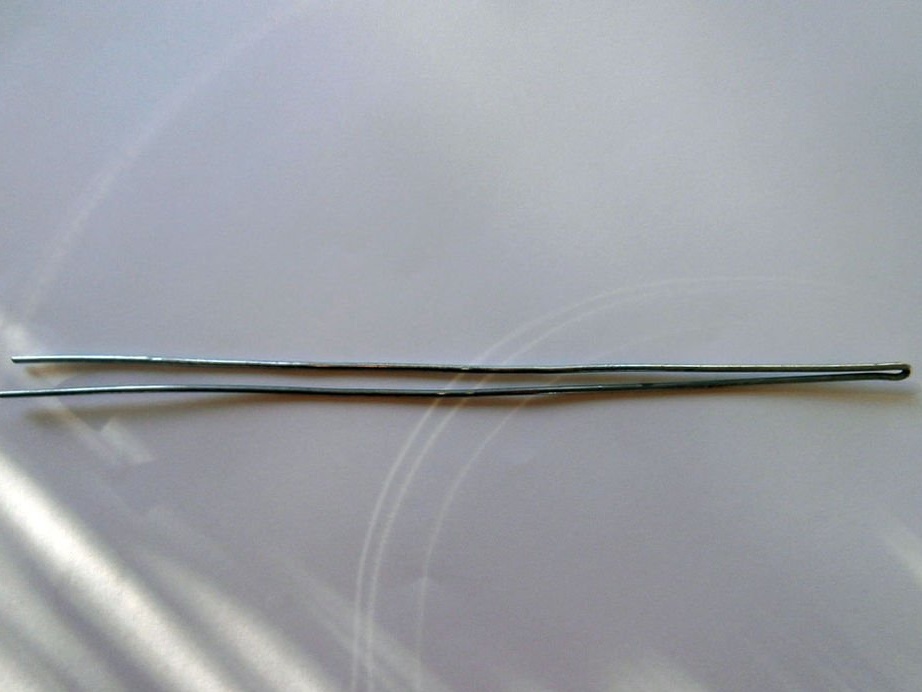
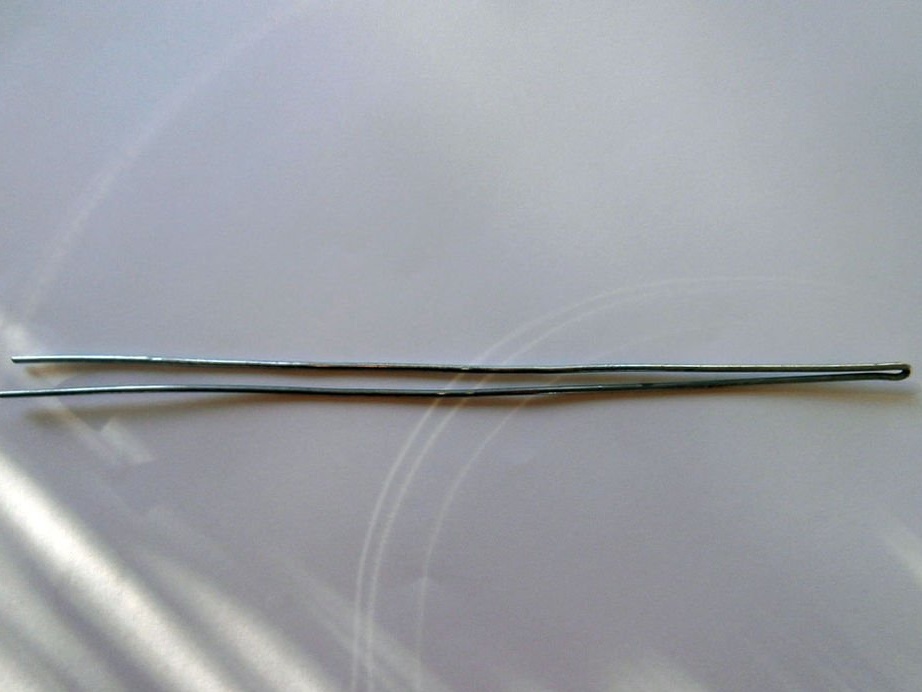
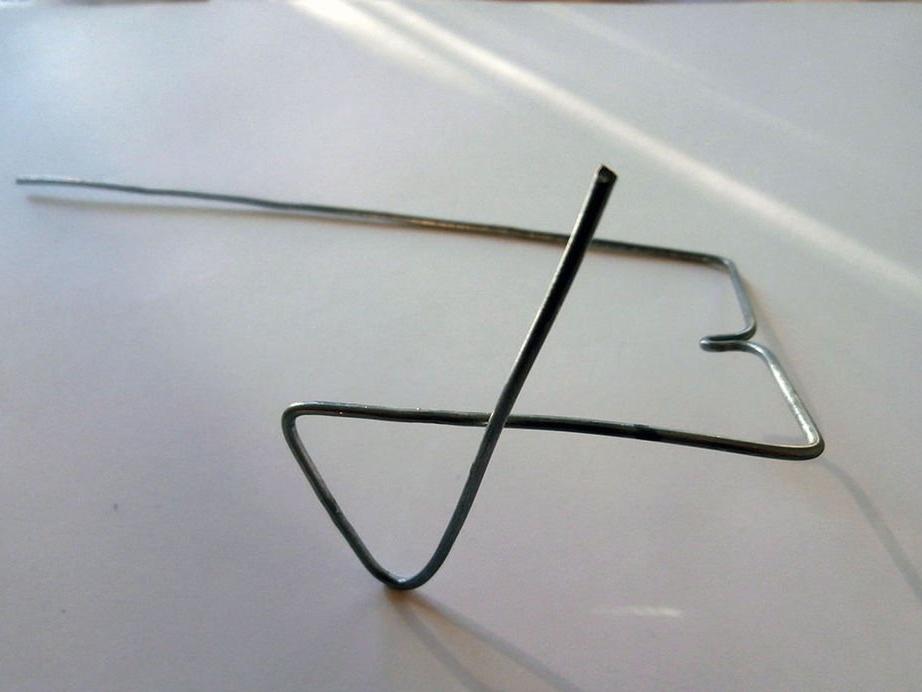
Tērauda stieple (2 mm)
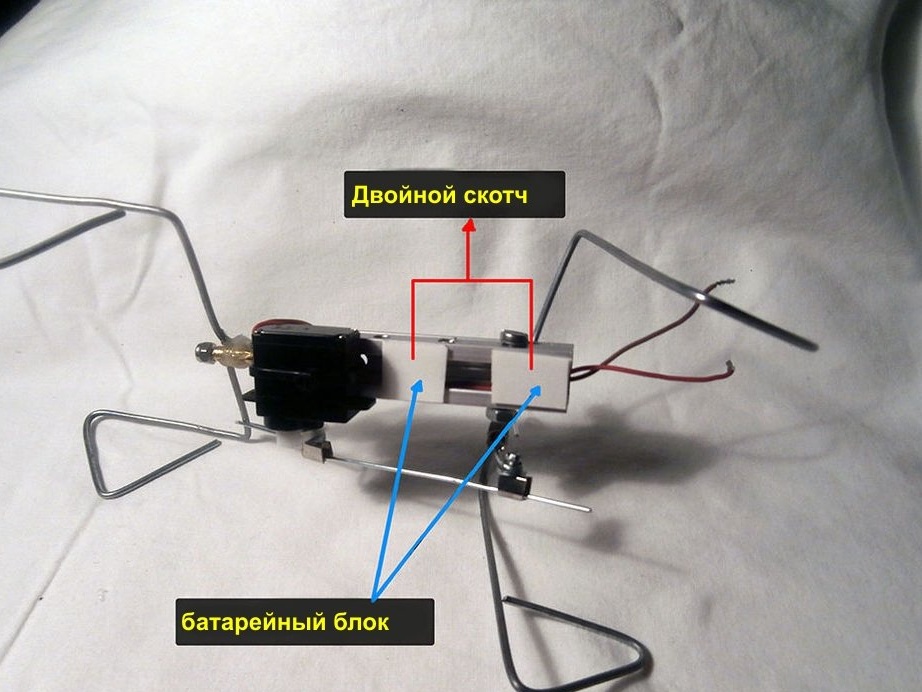
Divkārša līmlente
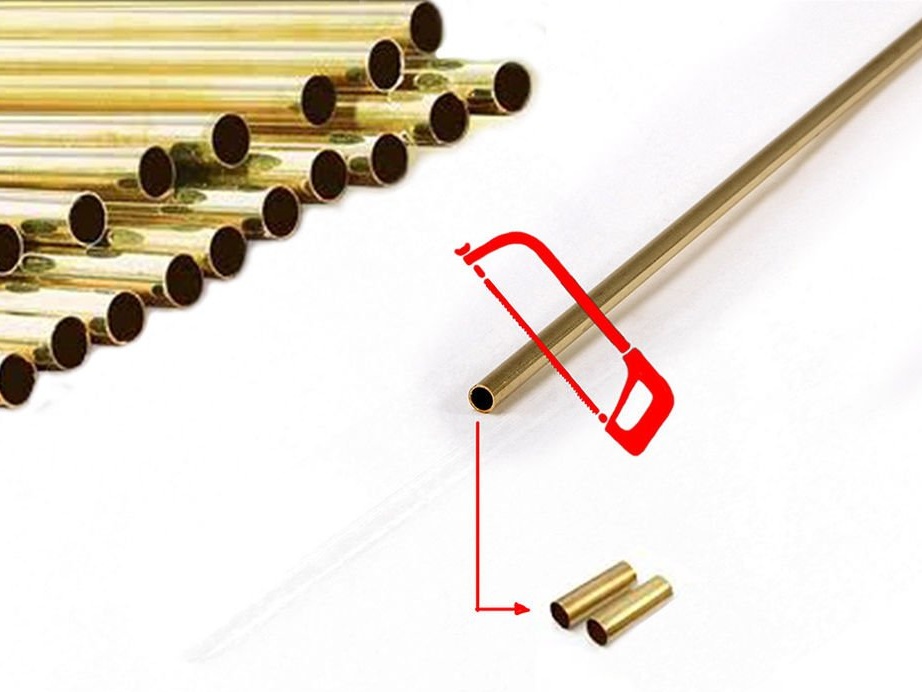
Misiņa caurule
(1X) maza skava
(1X) akumulators (2 x AAA)
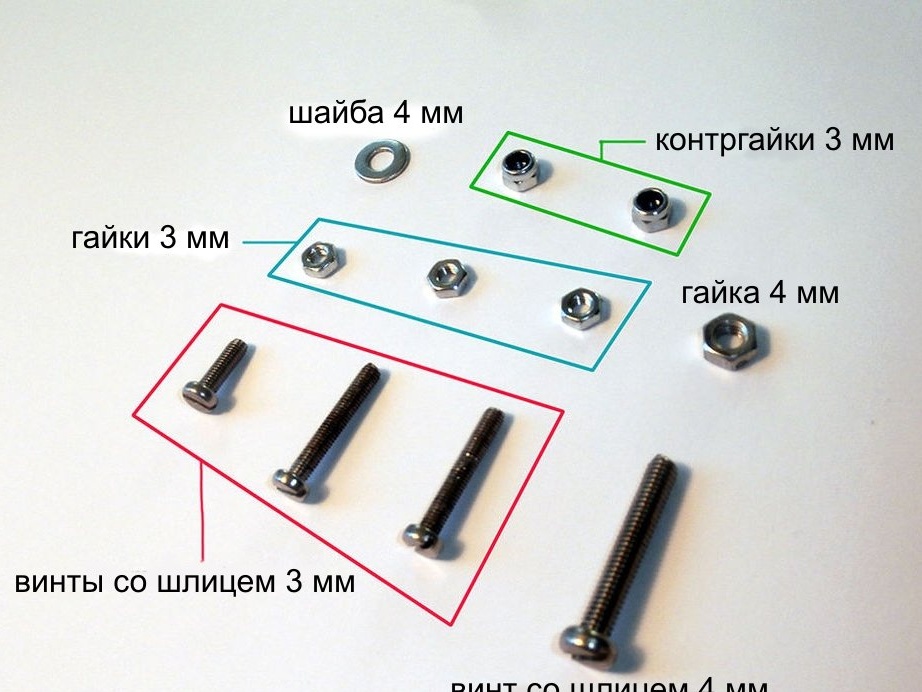
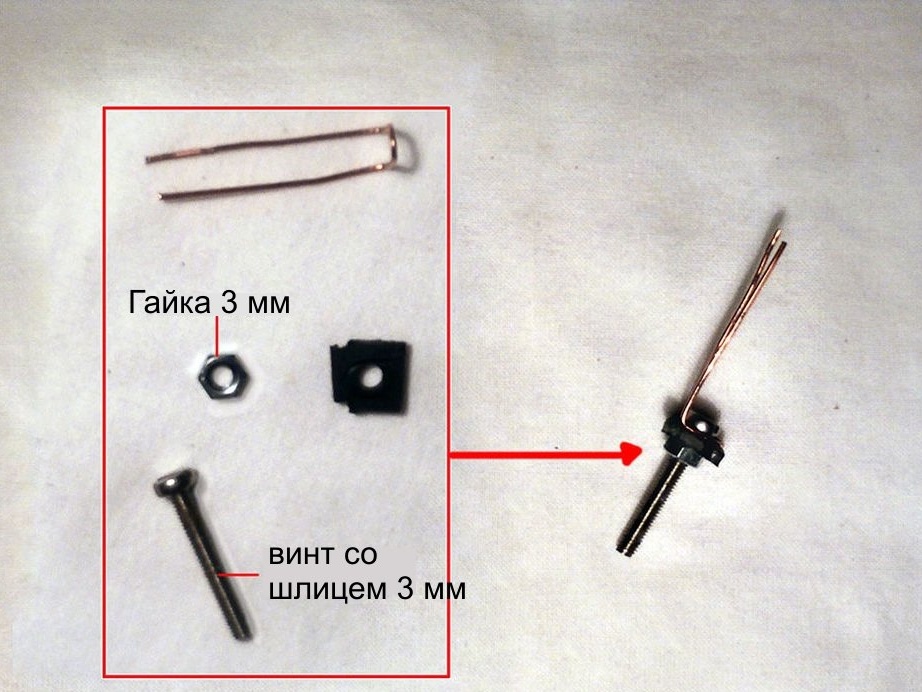
(2X) fiksējošie uzgriežņi (3 mm)
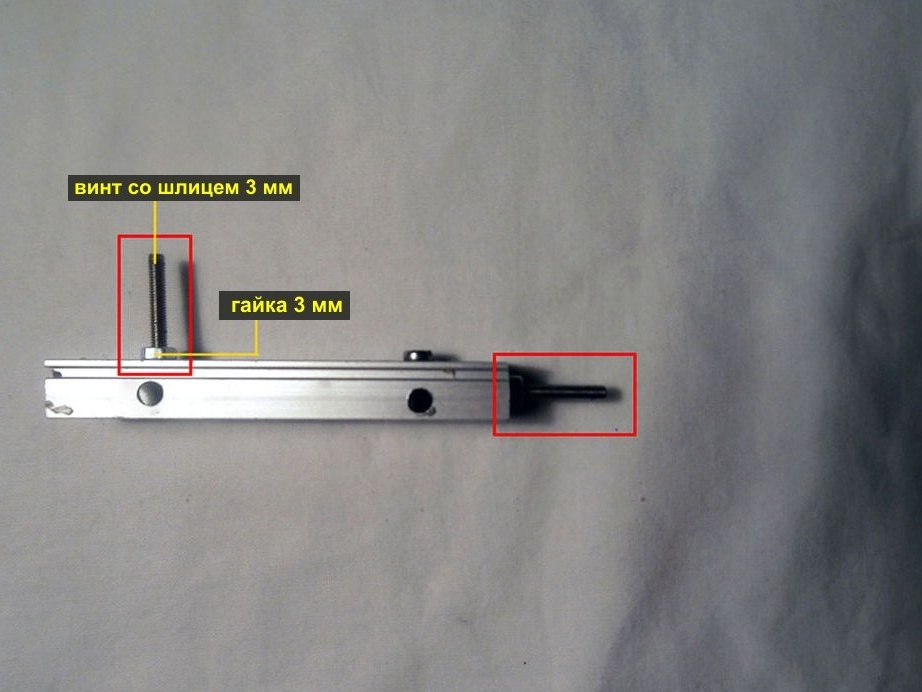
(3X) uzgriežņi un skrūves (3 mm)
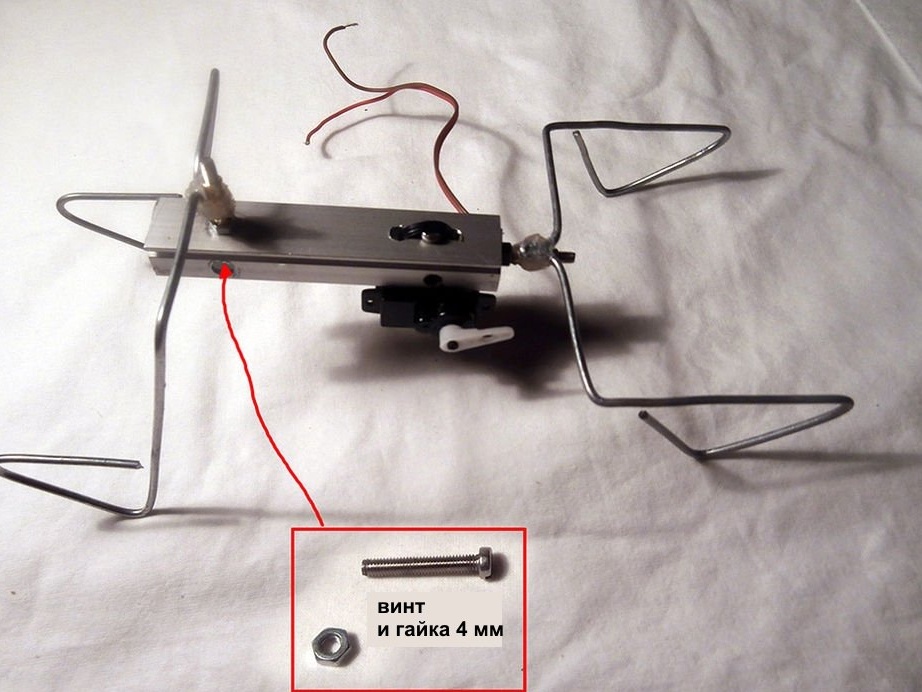
(1x) uzgriežņi un skrūves (4 mm)
(5x) paplāksne (3mm)
(1X) paplāksne (4mm)
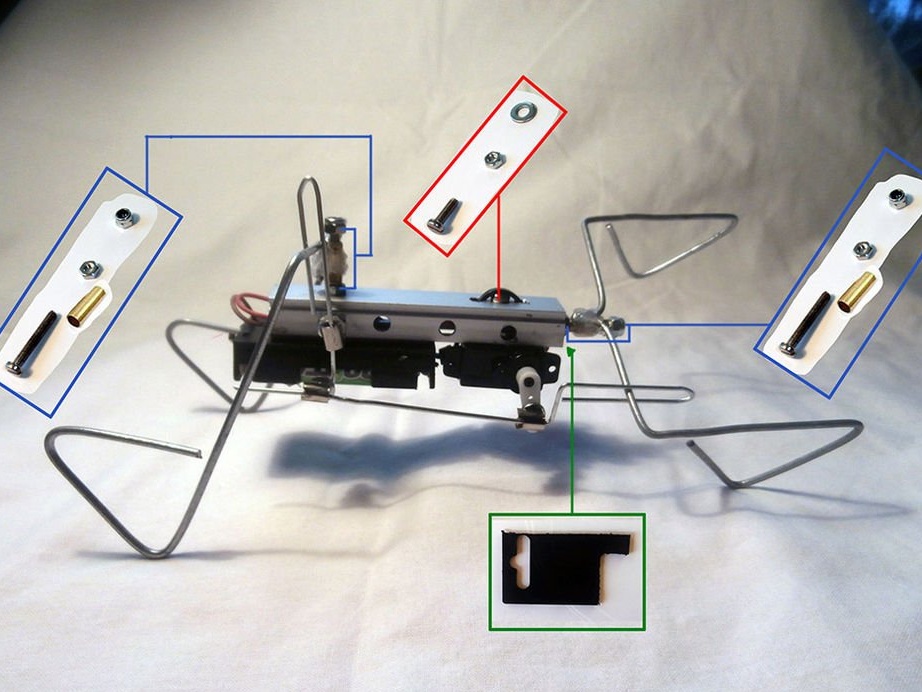
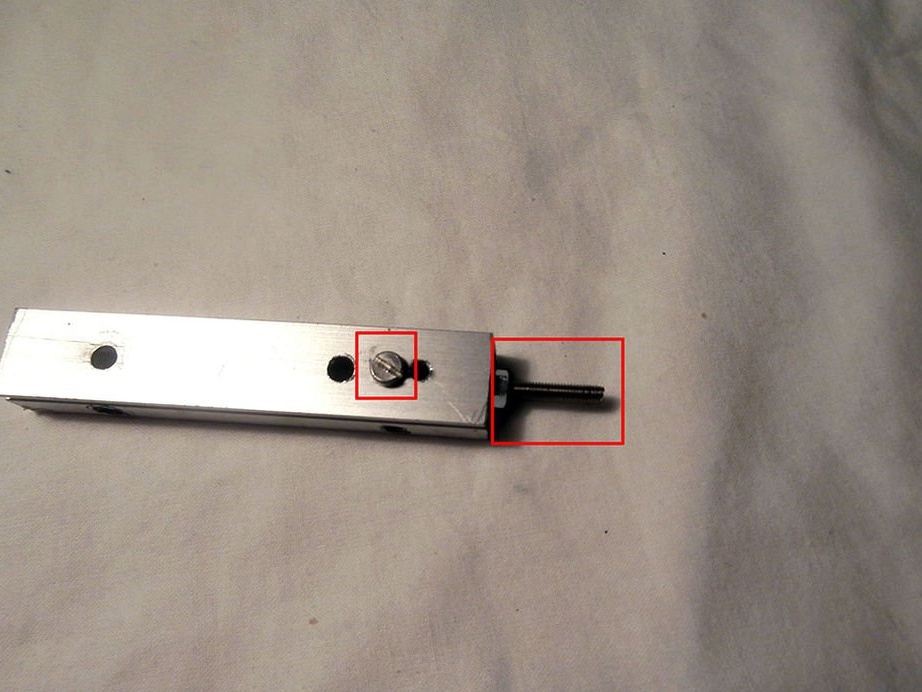
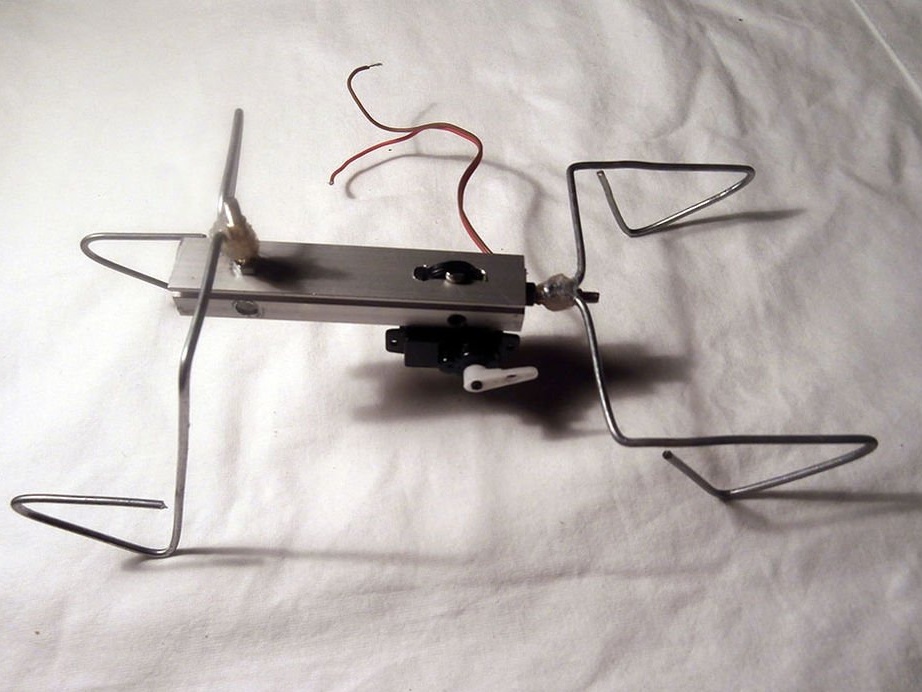
3. solis: detaļu salikšana
4. solis: rīki
5. solis: izmitināšana


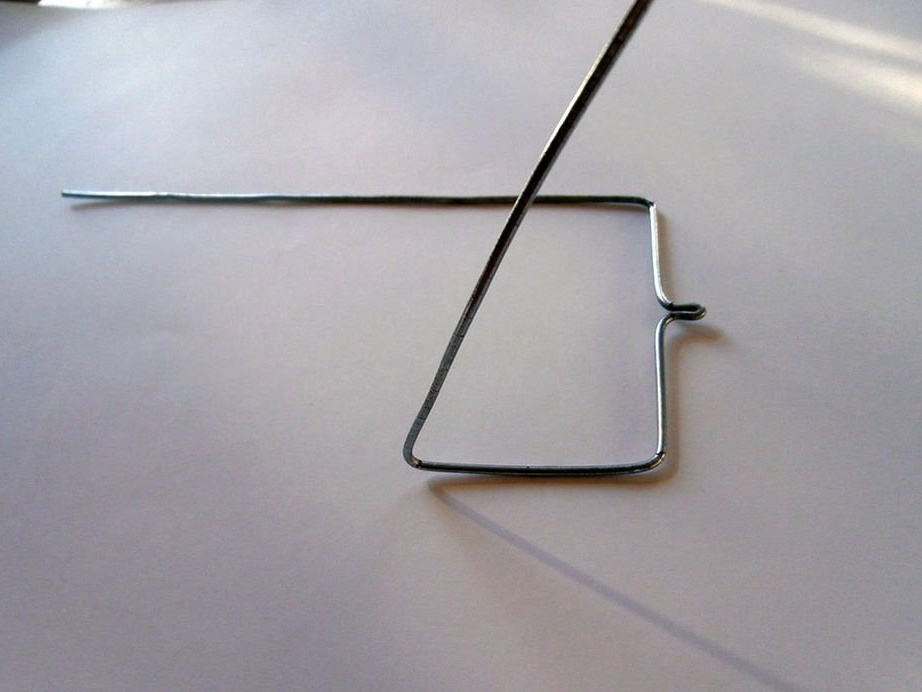
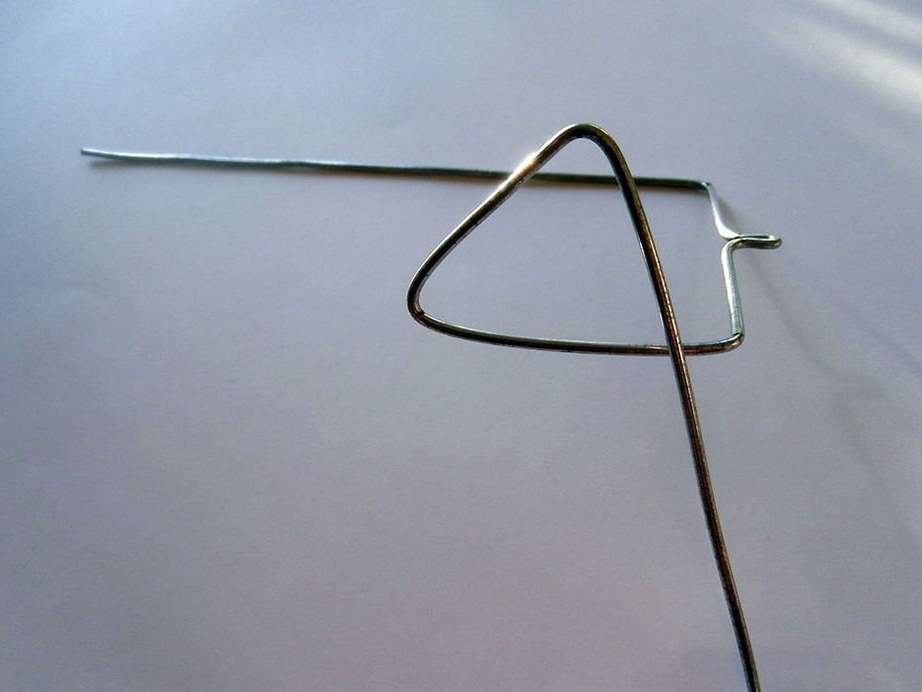
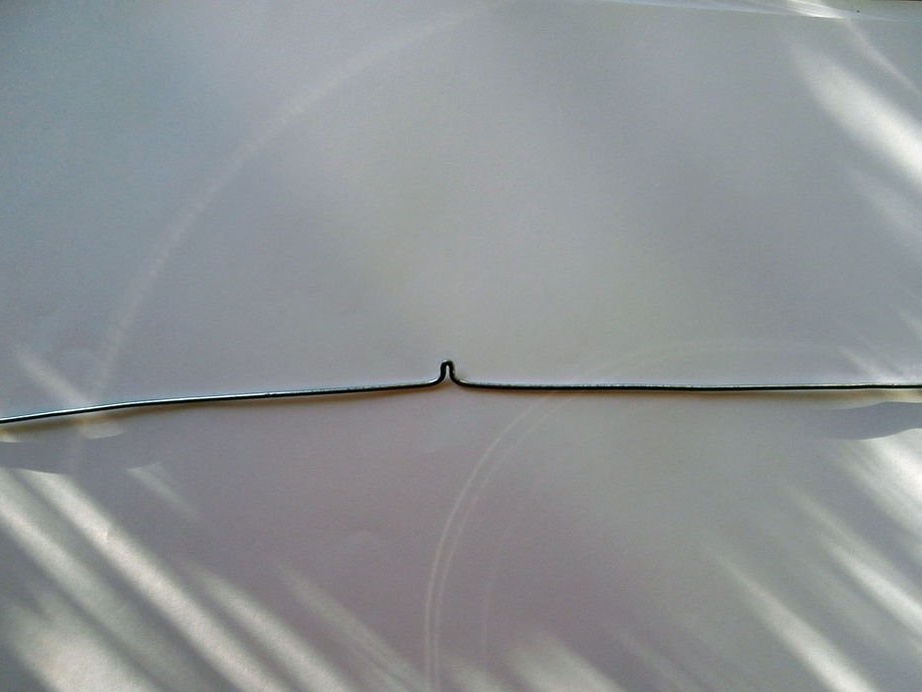
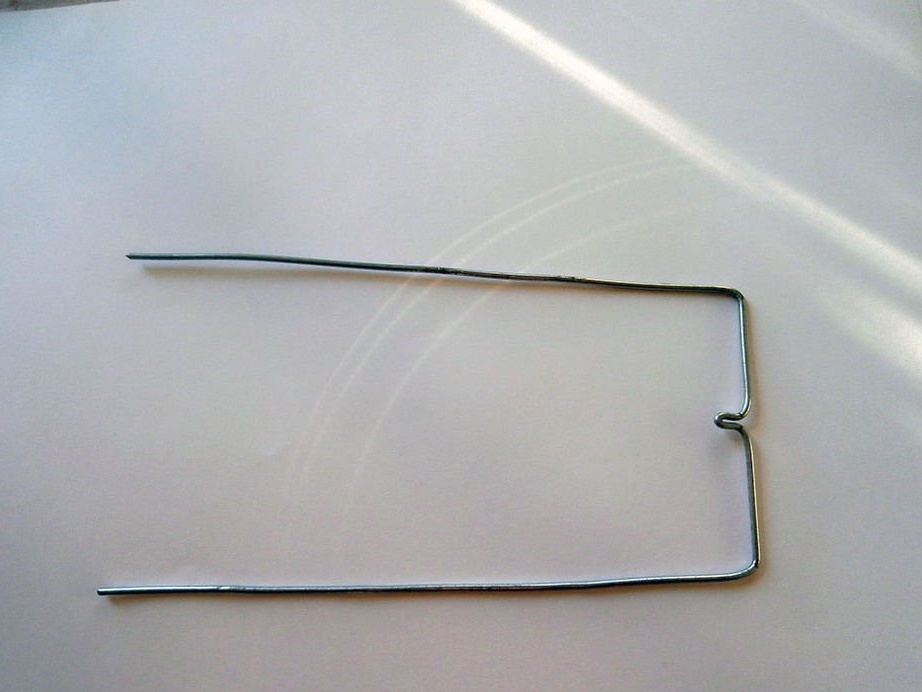
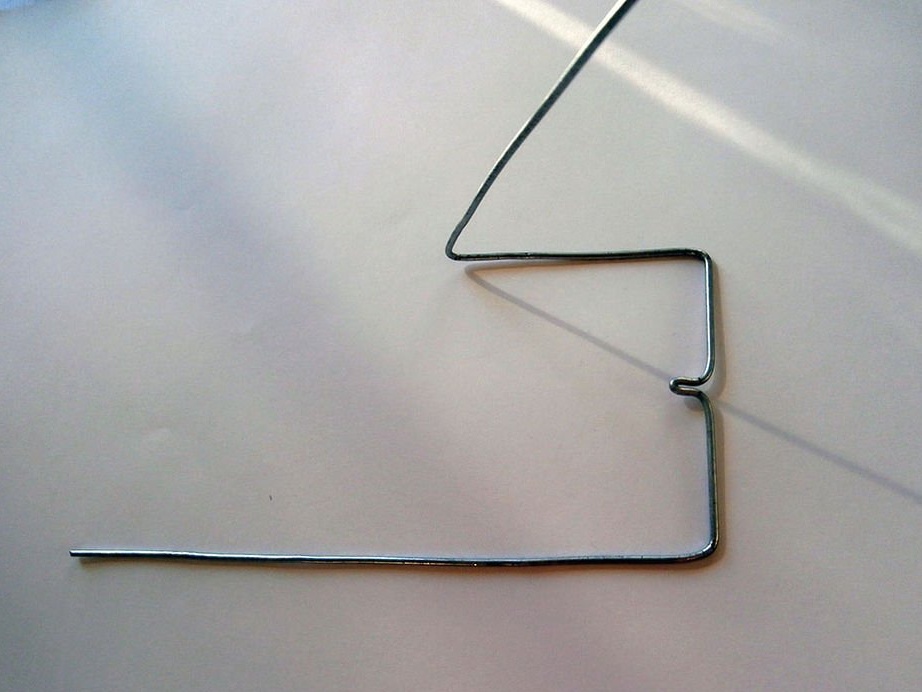
6. solis: priekšējās kājas
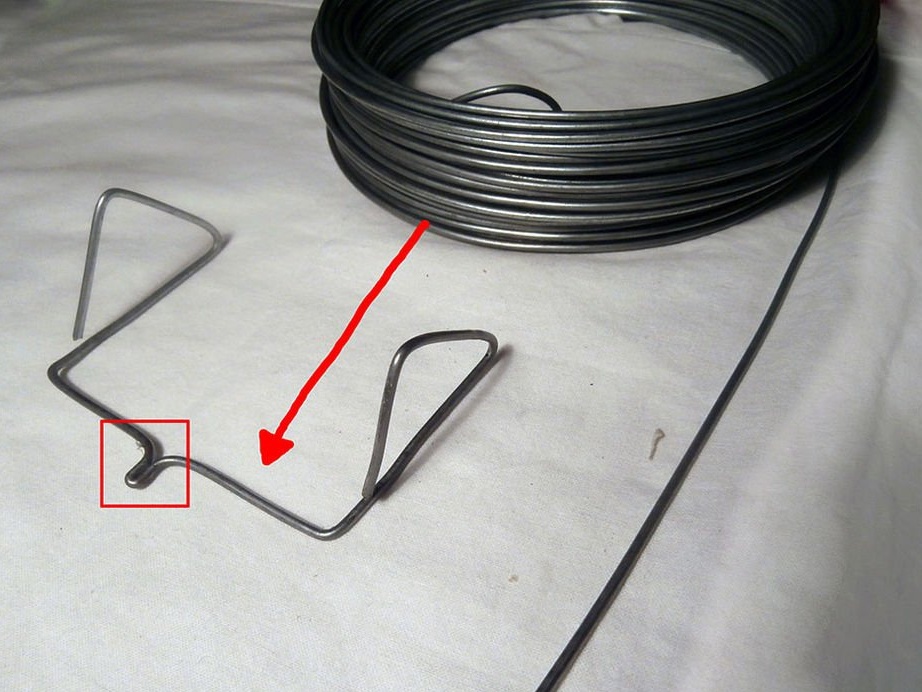
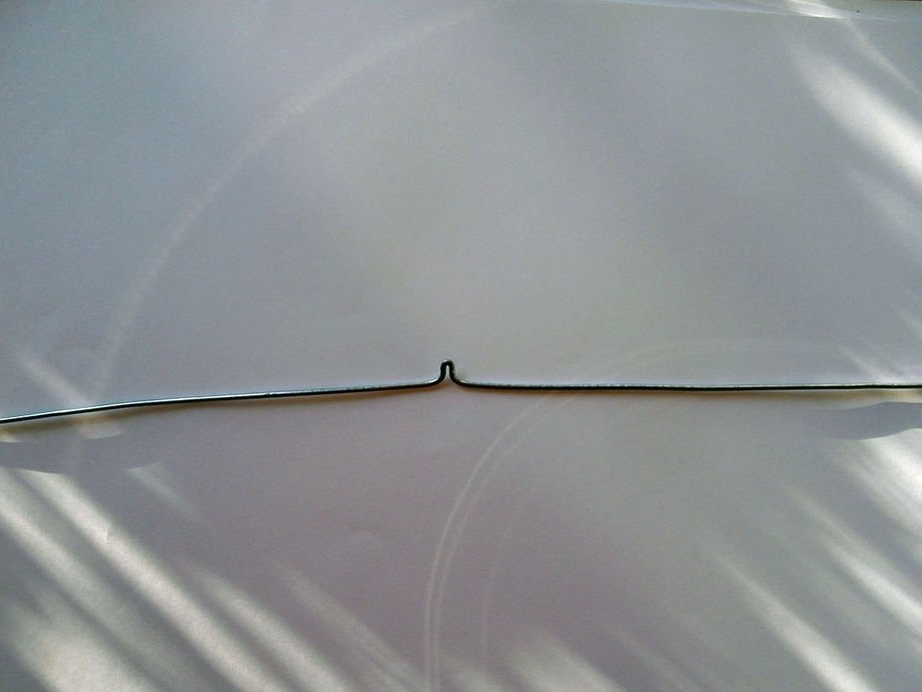
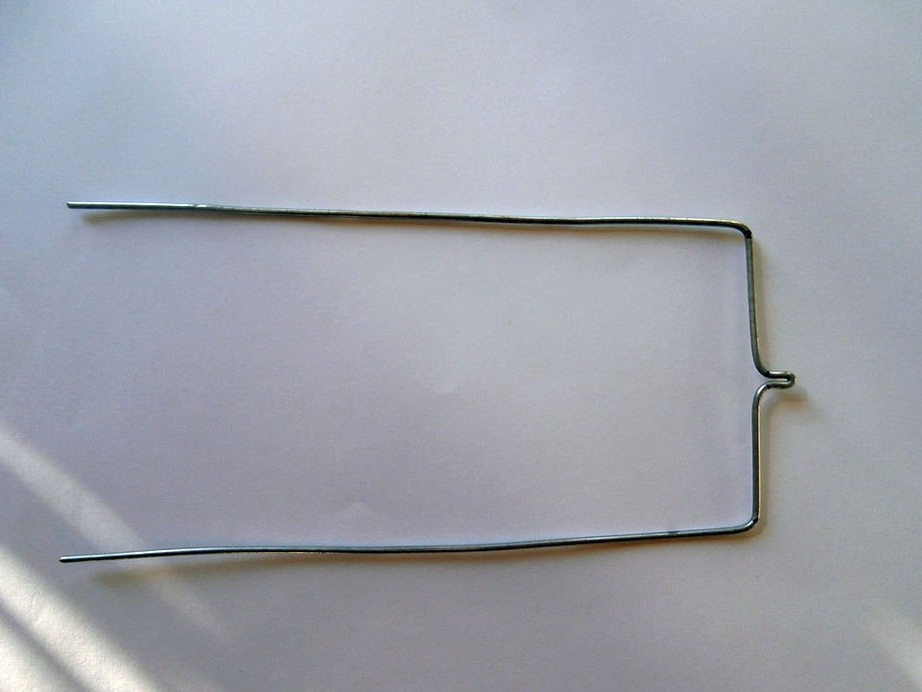
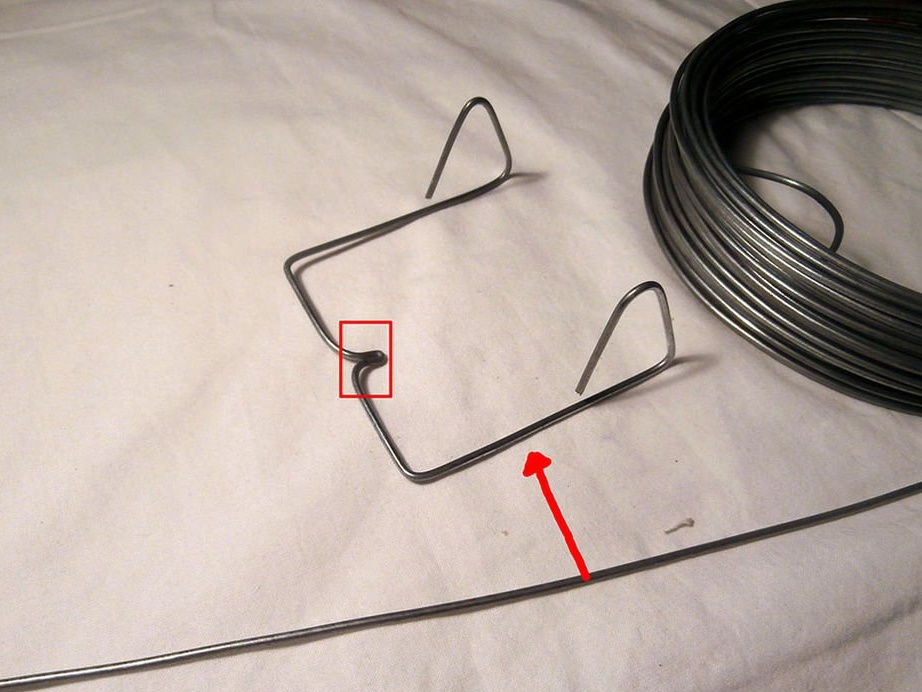
7. solis: pakaļkājas
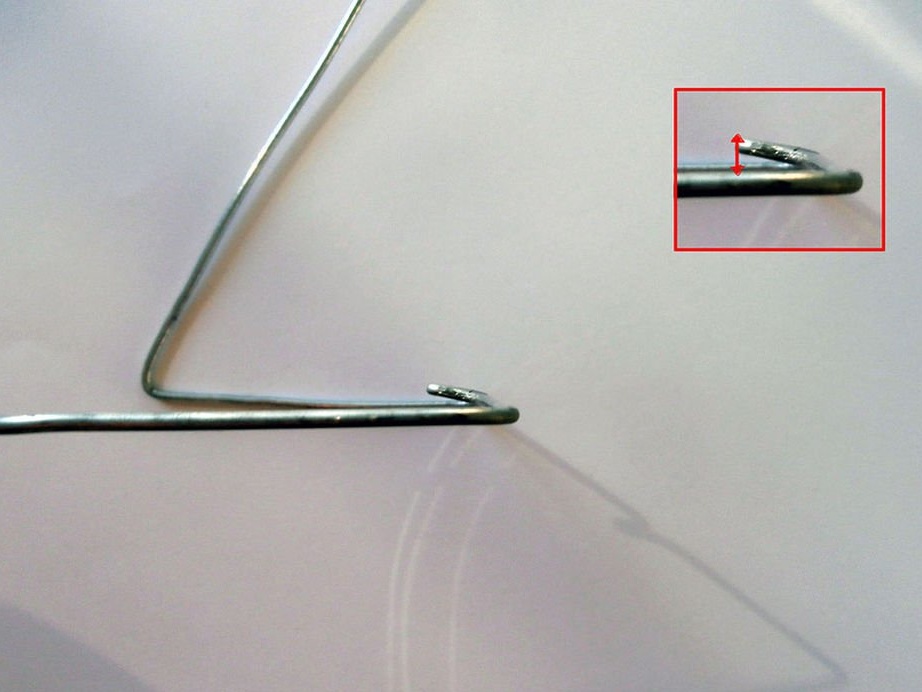
8. solis: pēdu piestiprināšana
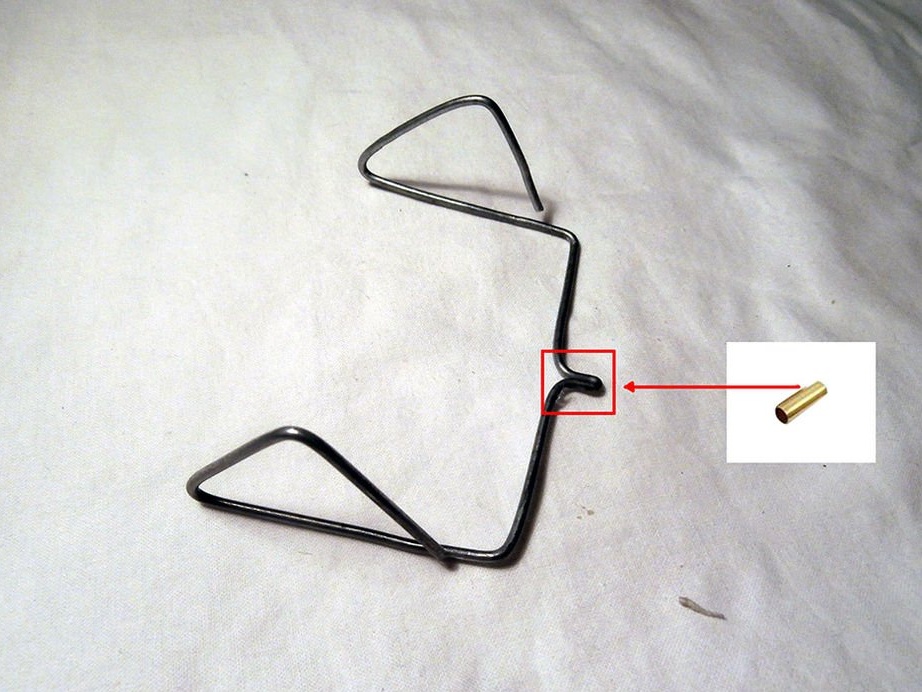
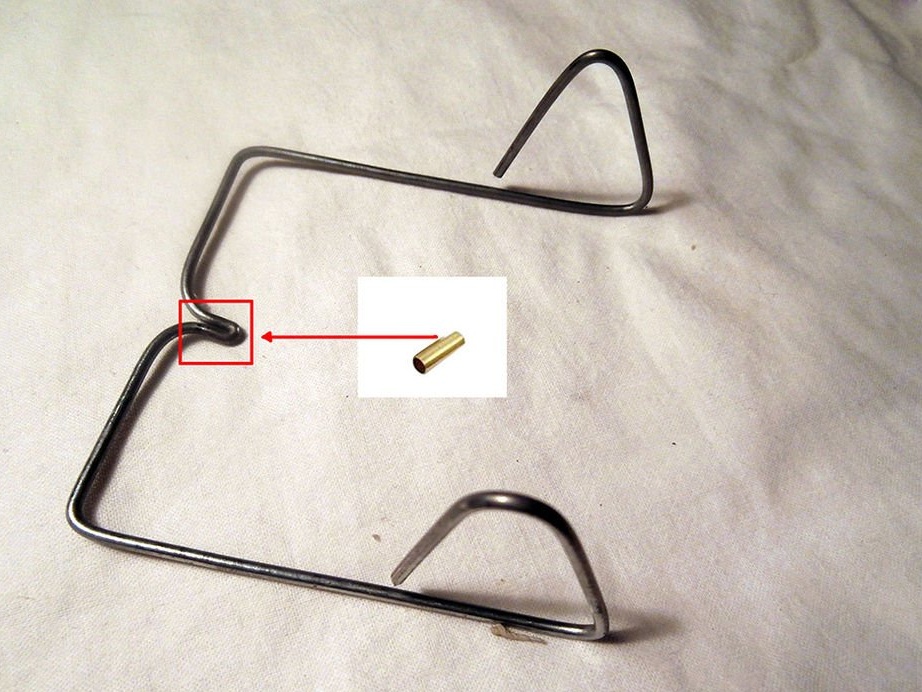
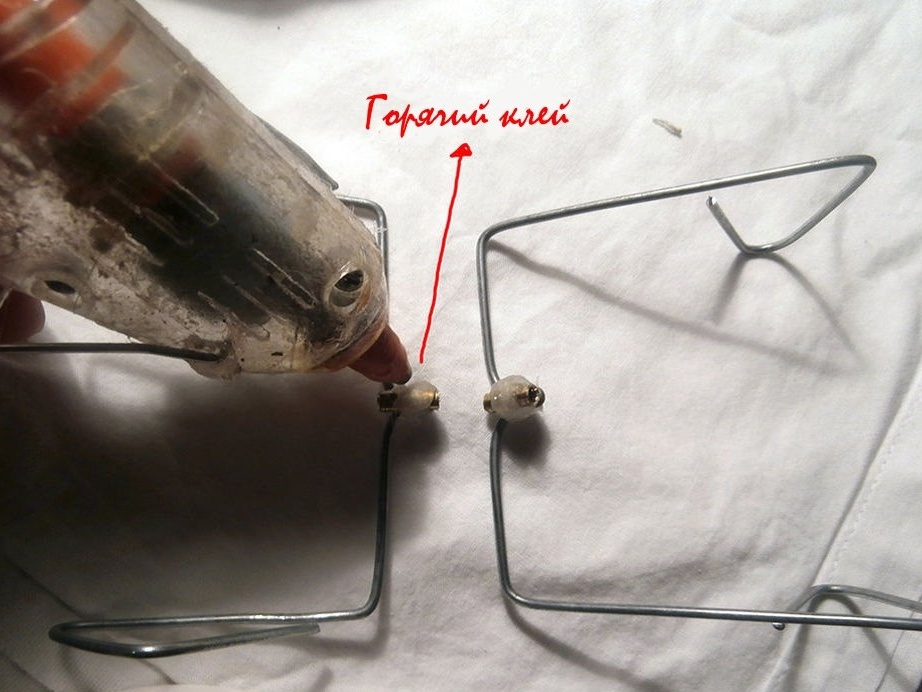
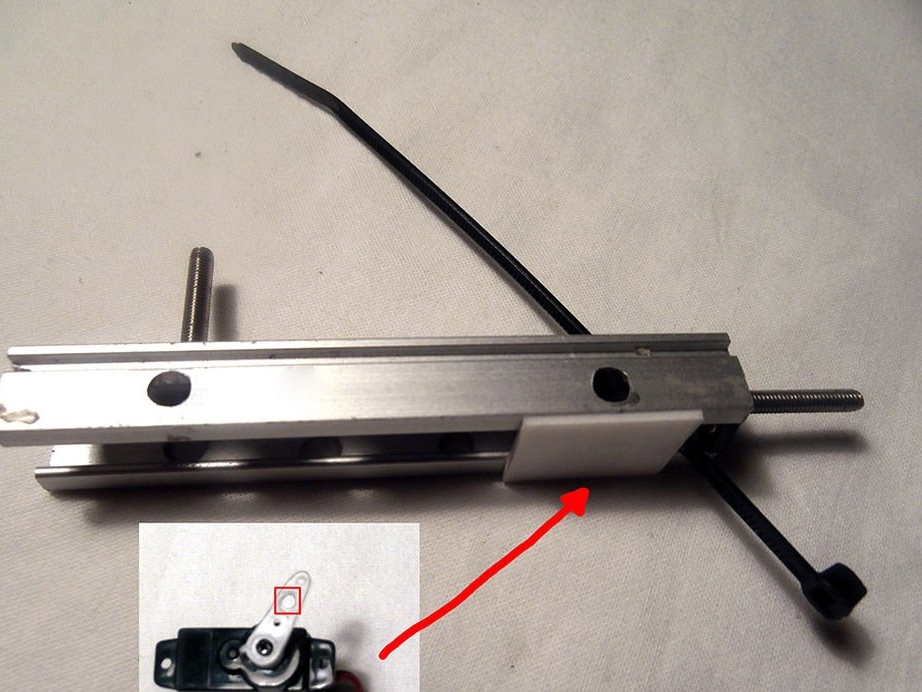
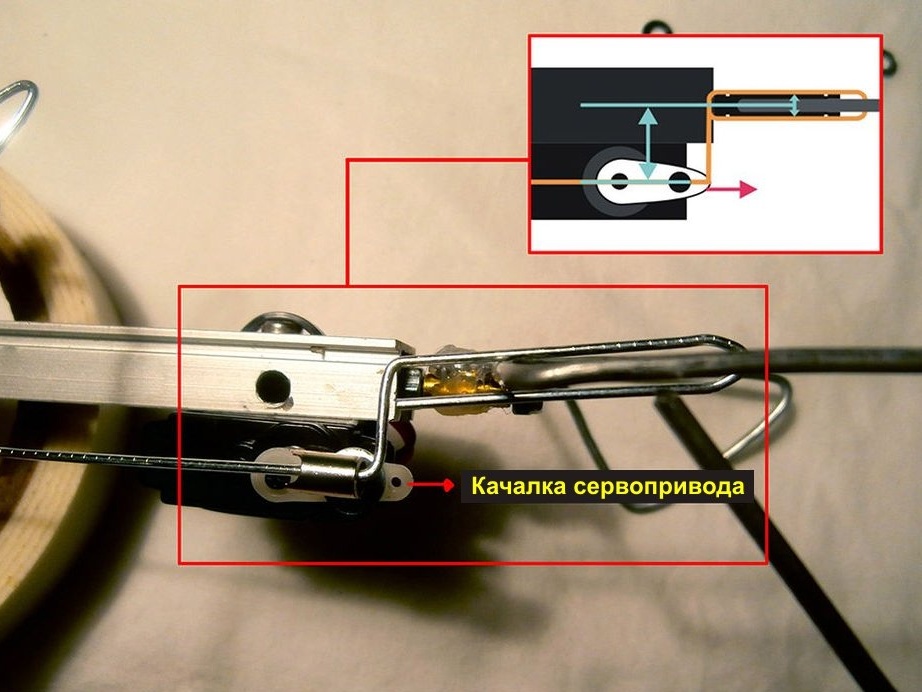
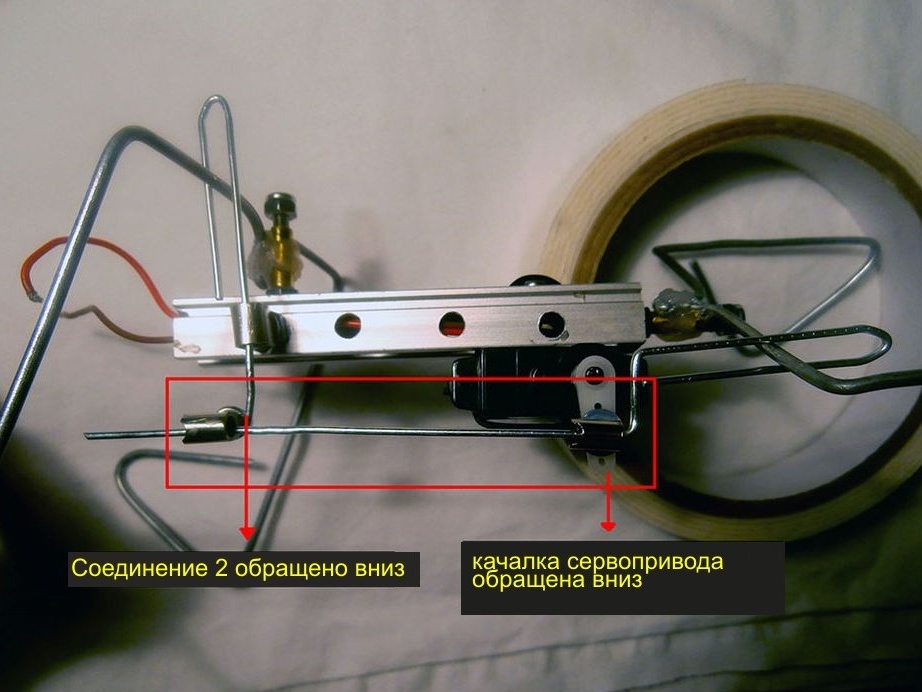
9. solis: Sajūgs
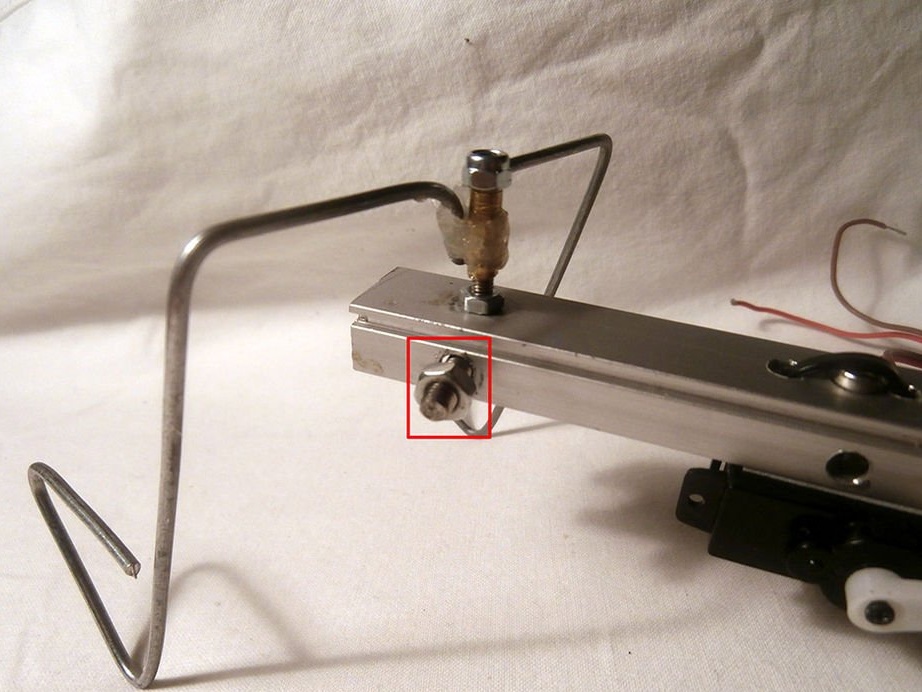
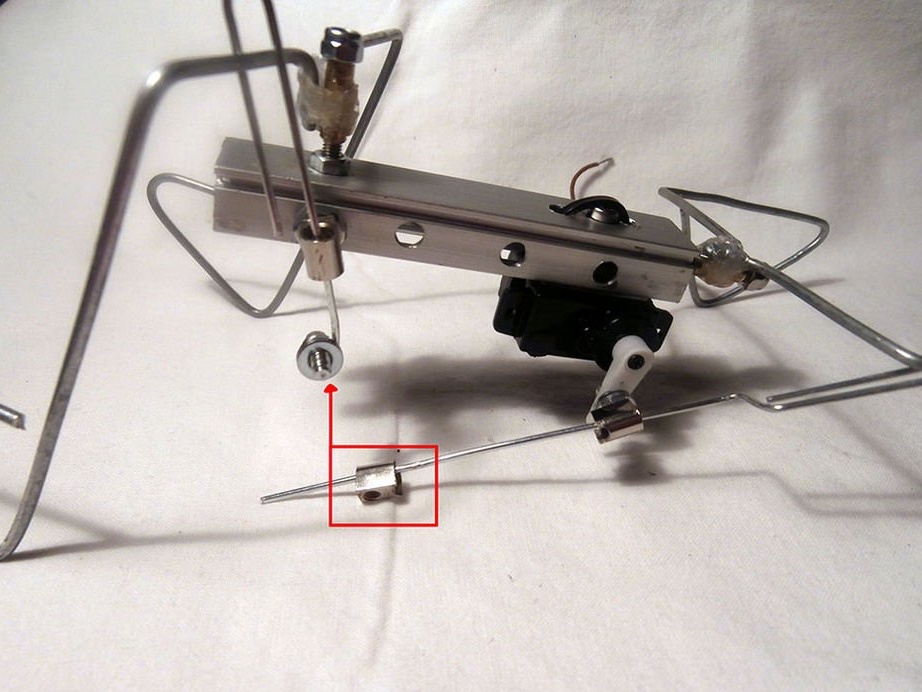
10. solis: Sajūga stiprinājums
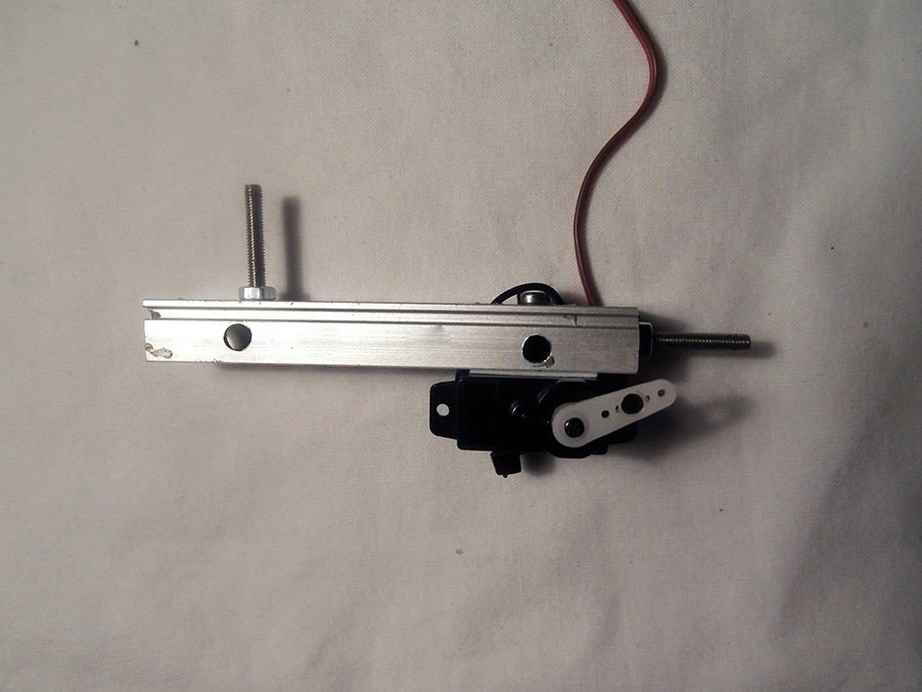
11. solis: pēdējie pieskārieni
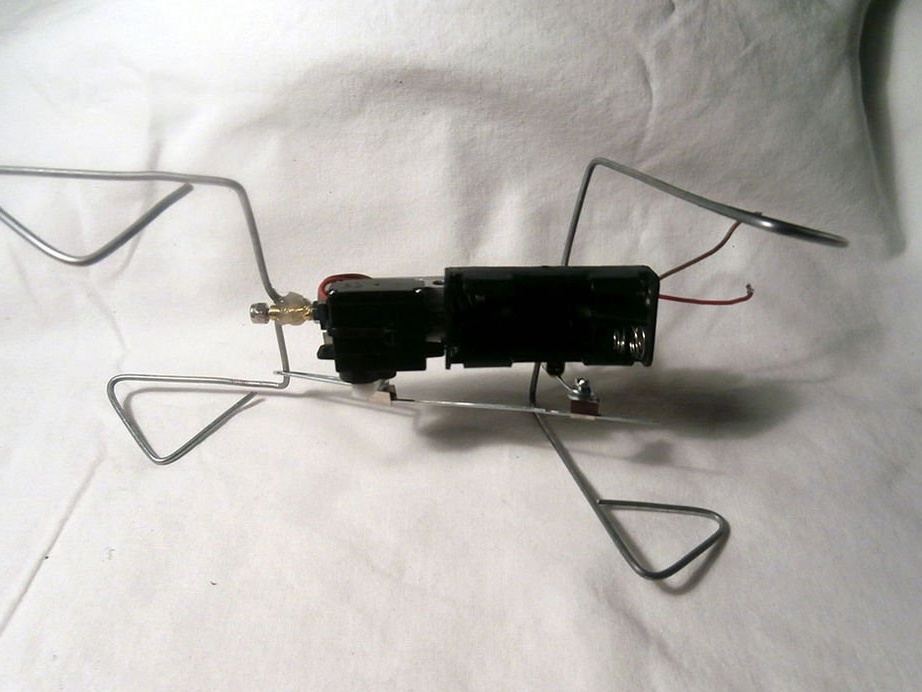
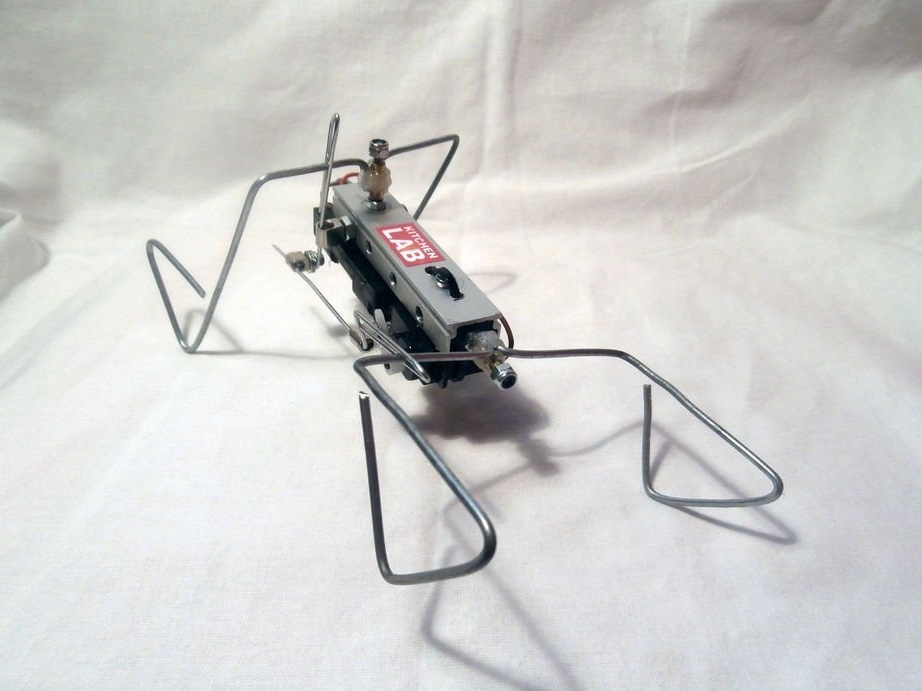
Noslēgumā vienkārši vadiet servo un baterijas un robots Pūce sāks ceļojumu apkārt jūsu mājām :)