

Ja jūs veidojat savu pirmo kvadrocopteru un jums nav 3D printera, šī instrukcija ir paredzēta jums. Ceļā uz šī kvadrocoptera celtniecību kapteinis izgatavoja septiņus modeļus, un katram bija savi, nozīmīgi trūkumi. Visbeidzot, izmantojot izmēģinājumus un kļūdas, viņš spēja panākt, ka tas darbojas modeli.
Instrumenti un materiāli:
- saplāksnis ar biezumu 7 mm un izmēru aptuveni 30 x 22 cm;
- alumīnija profila caurule 25 * 25 mm - 1 metrs;
-Izolenta;
-Stiprinājumi;
-Latch pavediens;
-Līmēšanas piederumi;



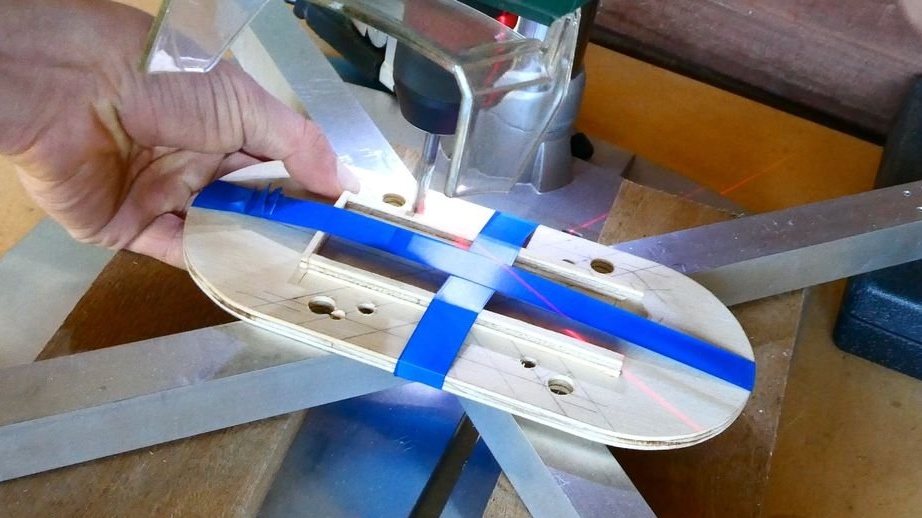
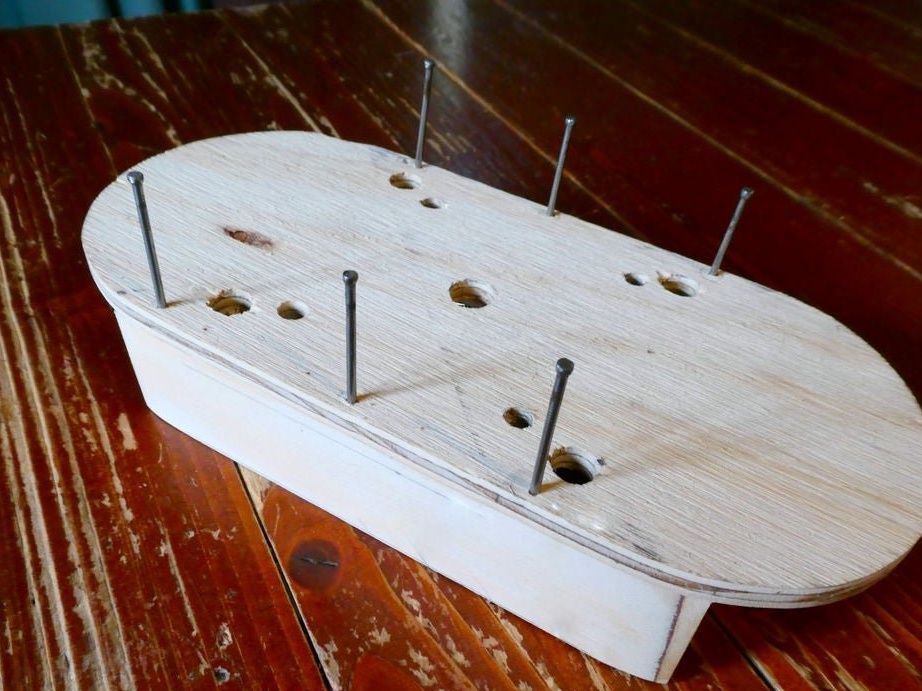
Pirmais solis: lieta
Veids raksts un pielīmējiet to uz saplākšņa. Izgrieziet detaļas un urbjiet visus caurumus.
Novietojiet akumulatoru uz pamatnes un līdzsvaro pamatni. Ieskicējiet akumulatoru. Līmējiet sloksnes no trim akumulatora pusēm.





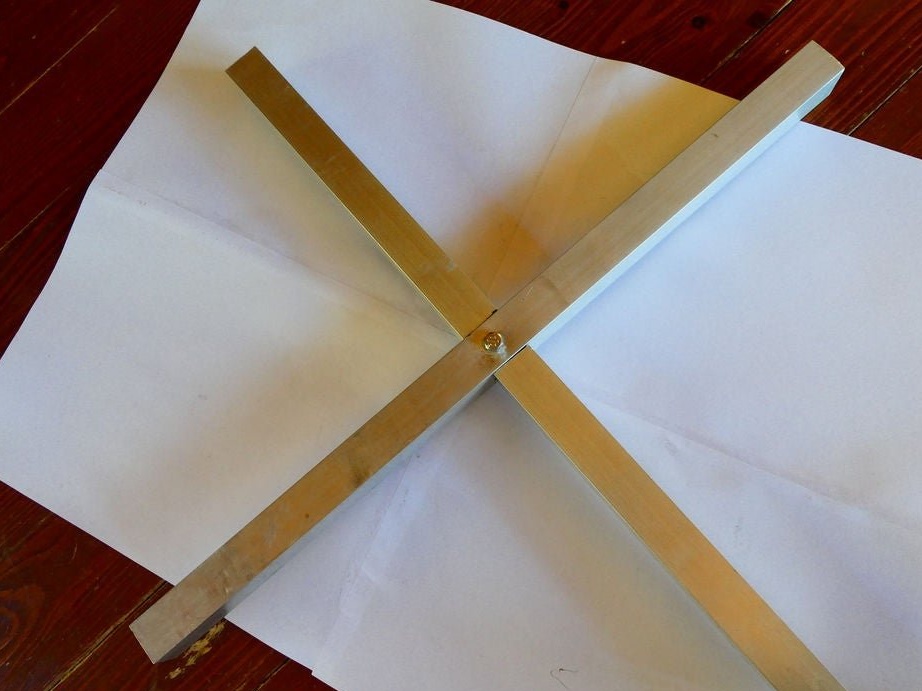
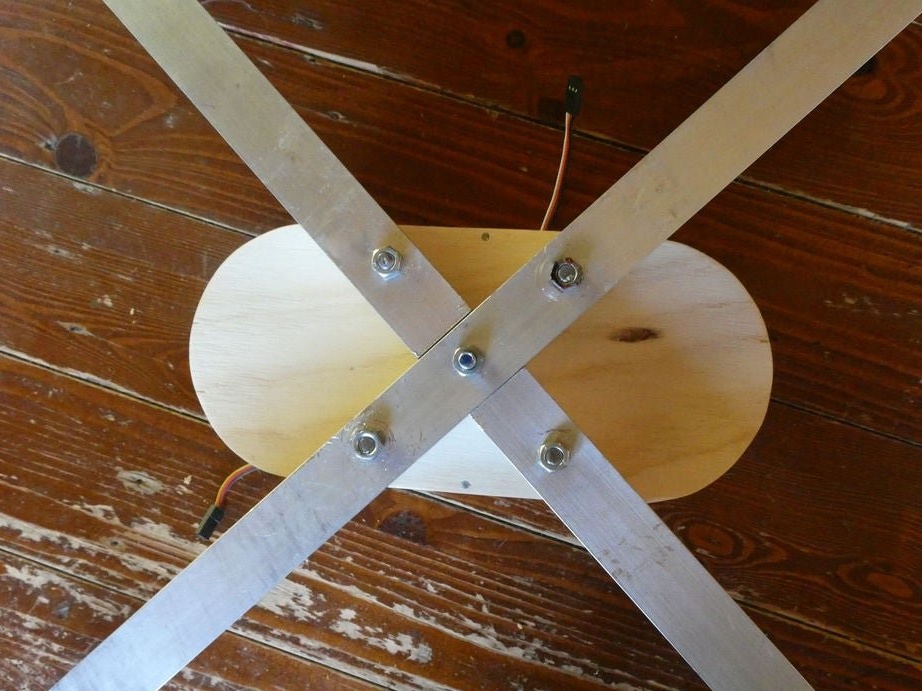
Otrais solis: rāmis
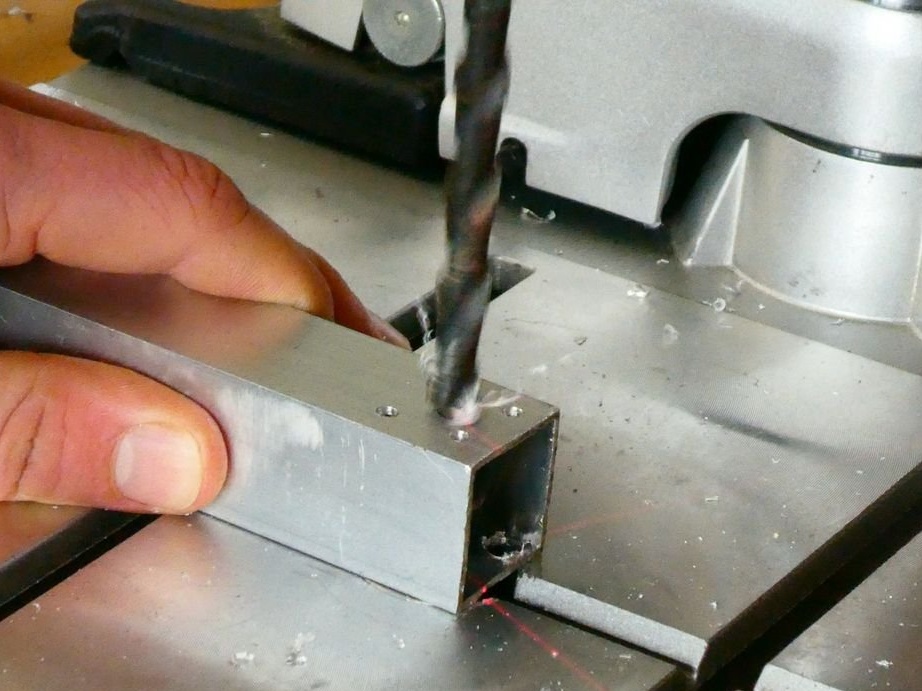
Sagrieziet alumīnija profila cauruli divās vienādās daļās (katra 50 cm). Cauruļu vidū nogrieziet divas 2,5 cm rievas.Izurbiet cauruma centrā. Salieciet krustu un piestipriniet ar skrūvi.

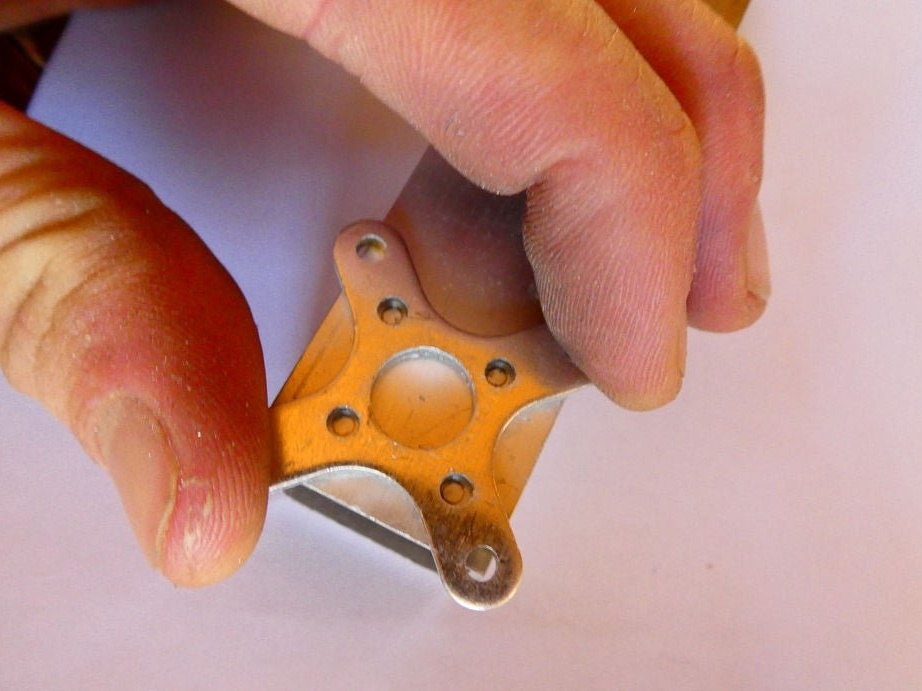
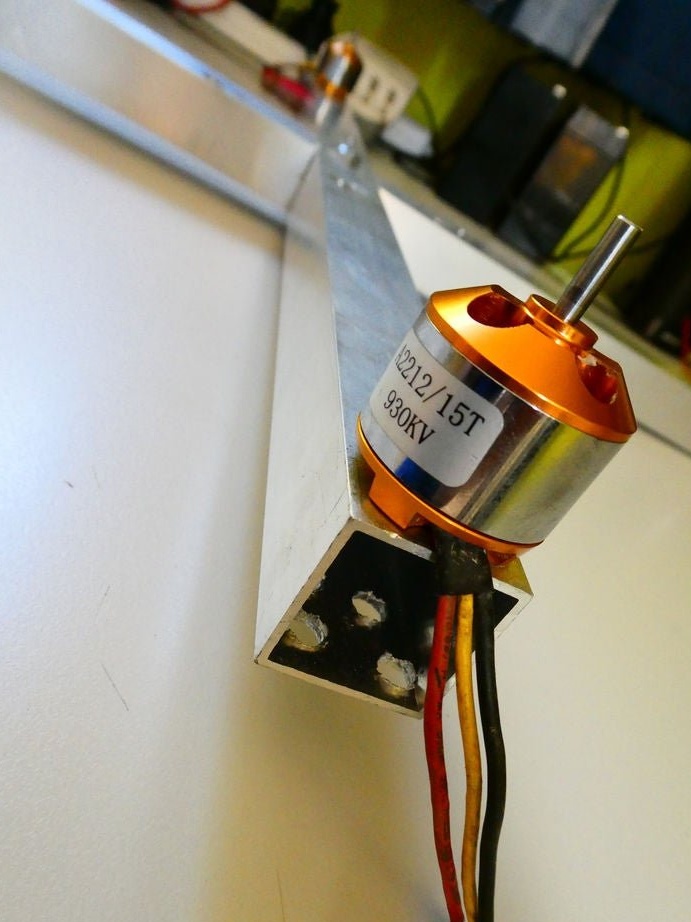
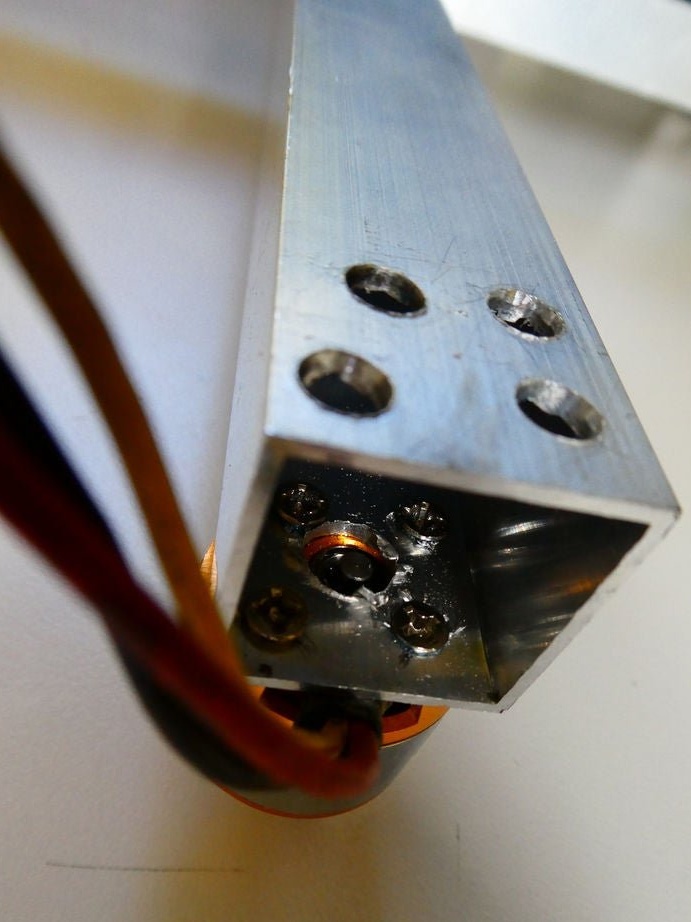
Tagad atzīmējiet montāžas caurumus, izmantojot tiem pievienoto motora stiprinājumu. Urbt caurumus. Stieņi ir jānoslīpē.

Atzīmējiet un urbējiet montāžas caurumus šasijas piestiprināšanai pie rāmja.
Līmējiet sānu sloksnes pie ķermeņa.

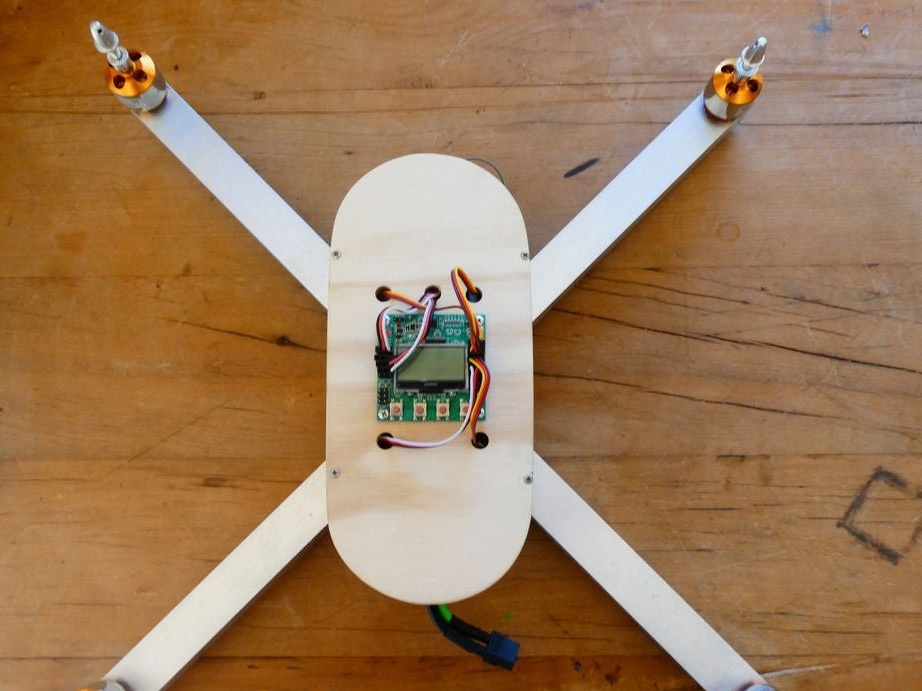
Trešais solis: uzstādīšana
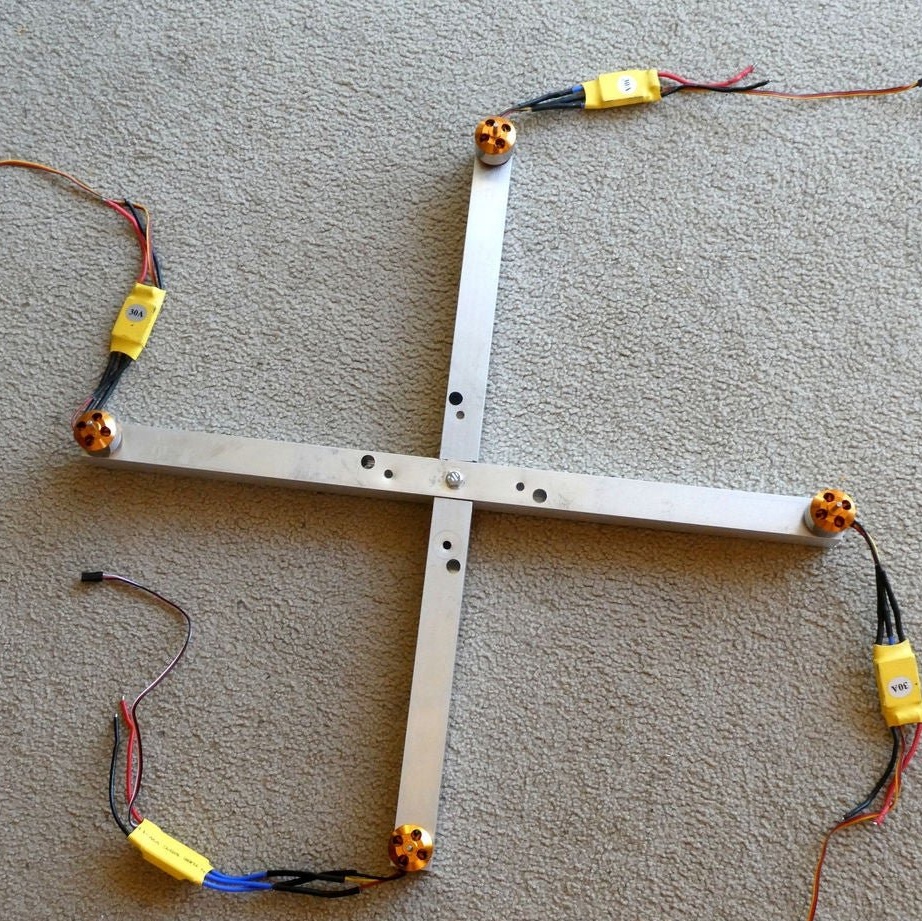
Tagad jums ir jānostiprina motori uz rāmja. Stiprināšanas skrūvēm ir absolūti nepieciešams uzlikt vītņu fiksatoru, pretējā gadījumā skrūves tiks atskrūvētas un motori aizlidos.
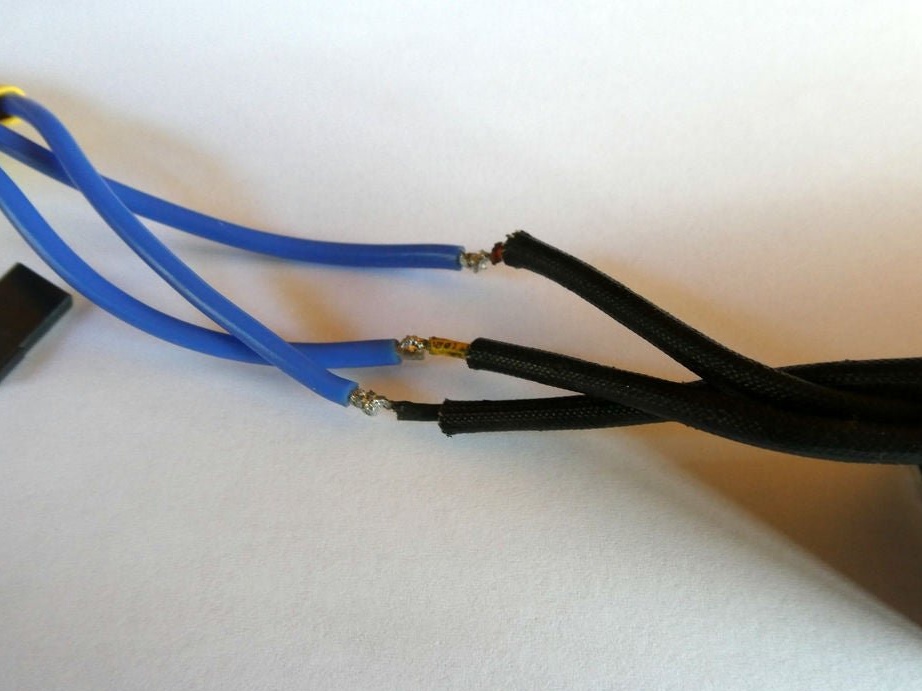
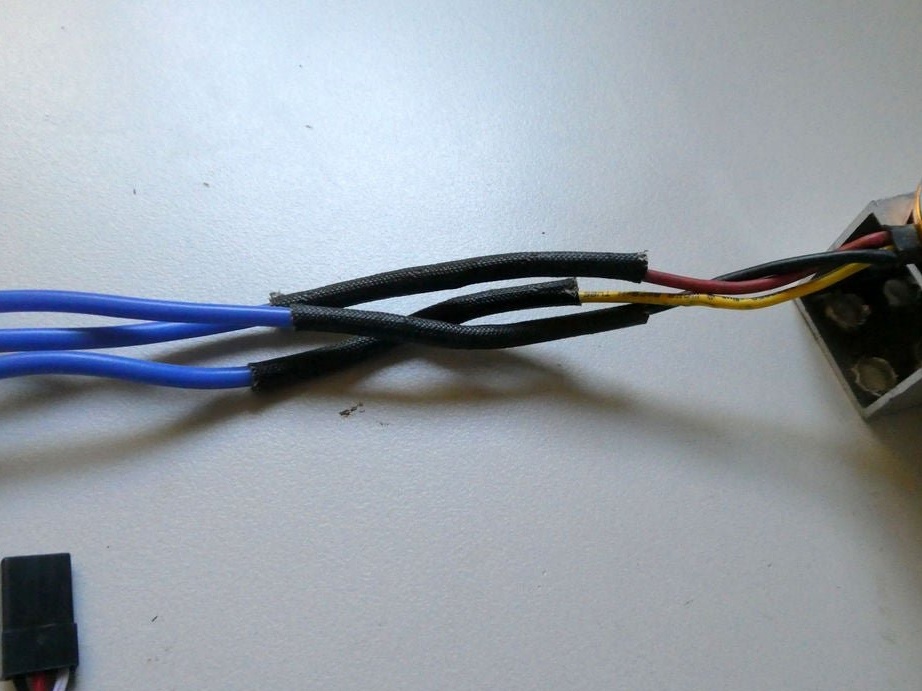
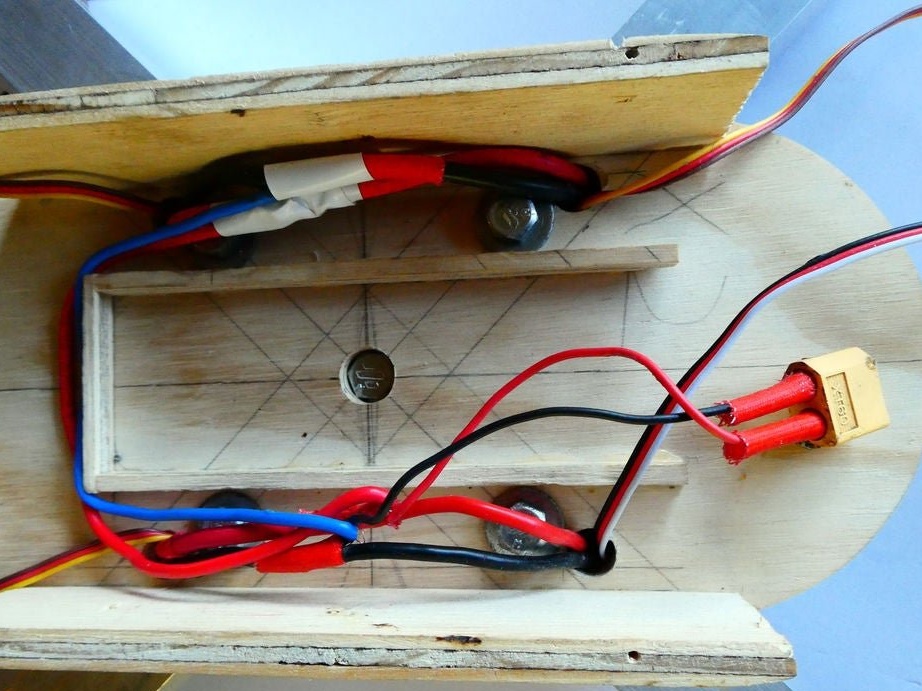
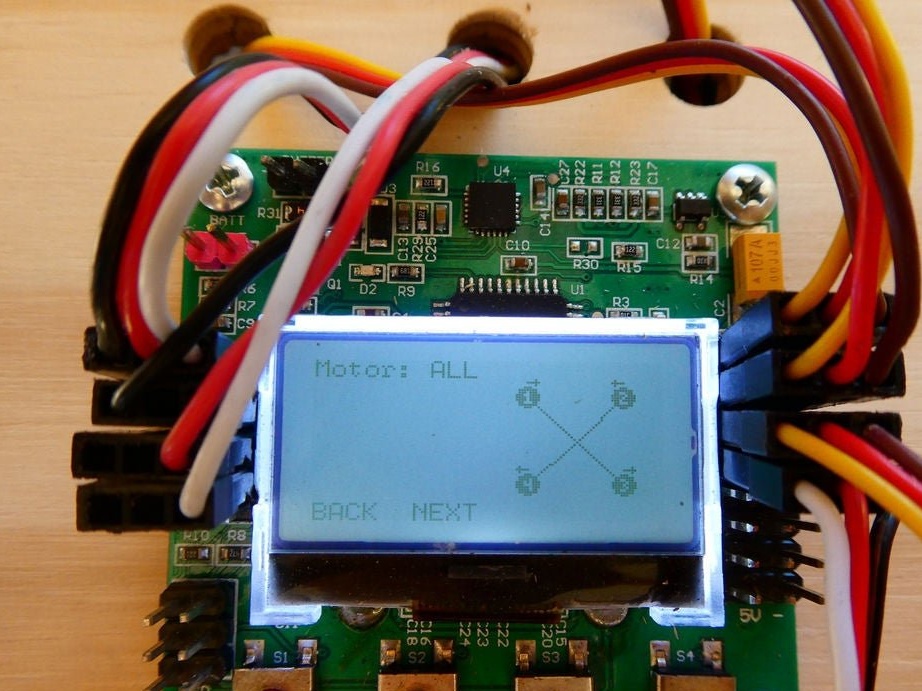
Pievienojiet ESC motoriem tā, lai augšējais kreisais motors pagrieztos pulksteņrādītāja virzienā, augšējais labais motors pagriezt pretēji pulksteņa rādītāja virzienam, apakšējais labais motors pagriezt pulksteņrādītāja virzienā, un apakšējais kreisais motors pagriezt pretēji pulksteņrādītāja virzienam. Lai mainītu motoru griešanās virzienu, nomainiet divus no trim vadiem. Izolējiet savienojumus.
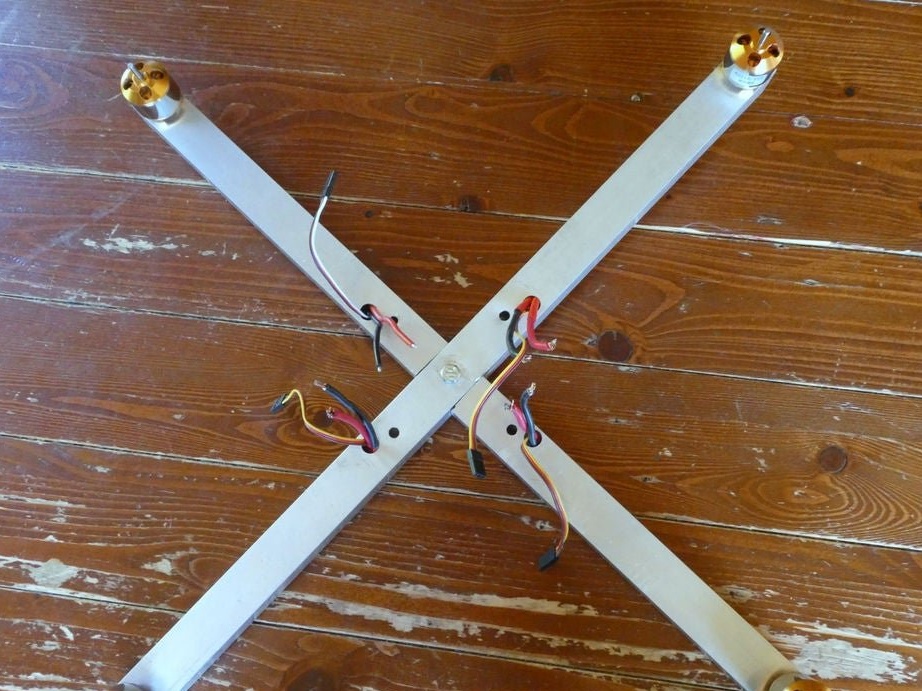
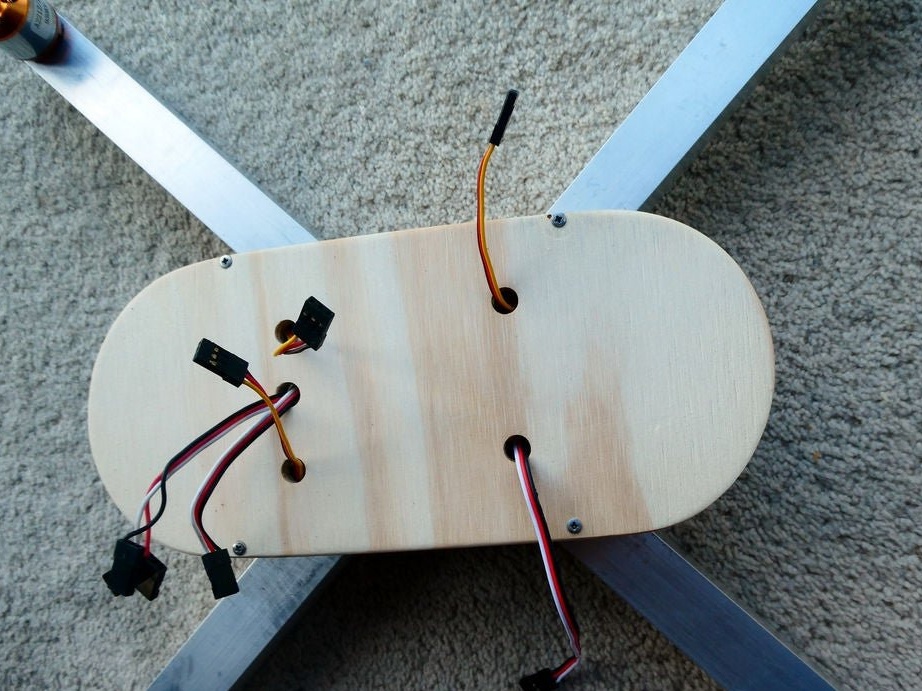
Izvelciet vadus caur rāmi un ievelciet caurumā, ESC ir fiksēts rāmja caurulēs.

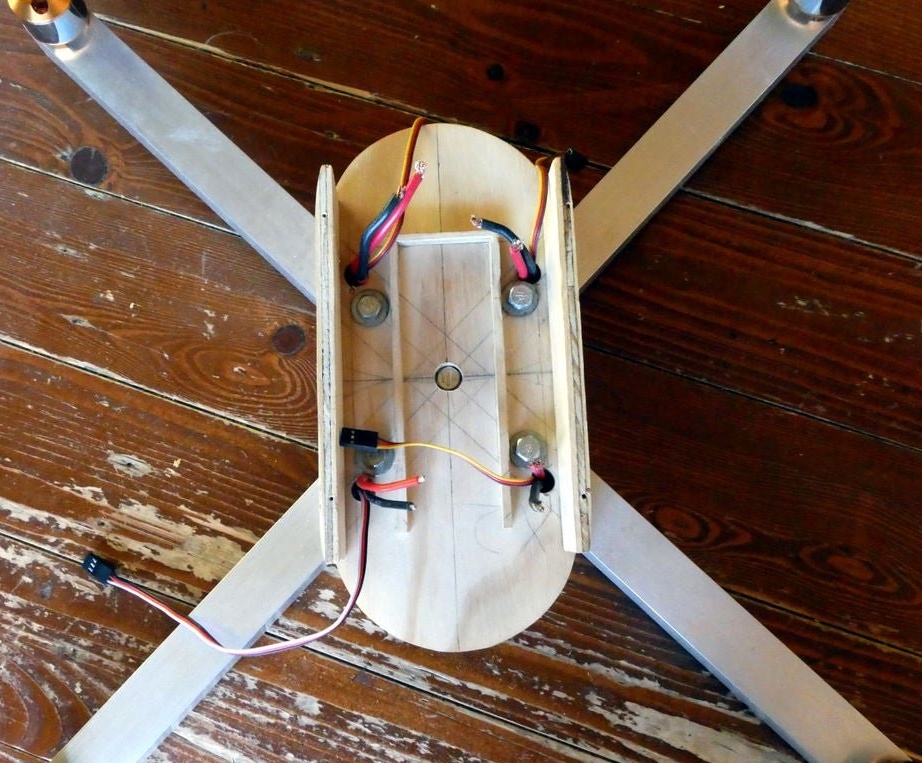
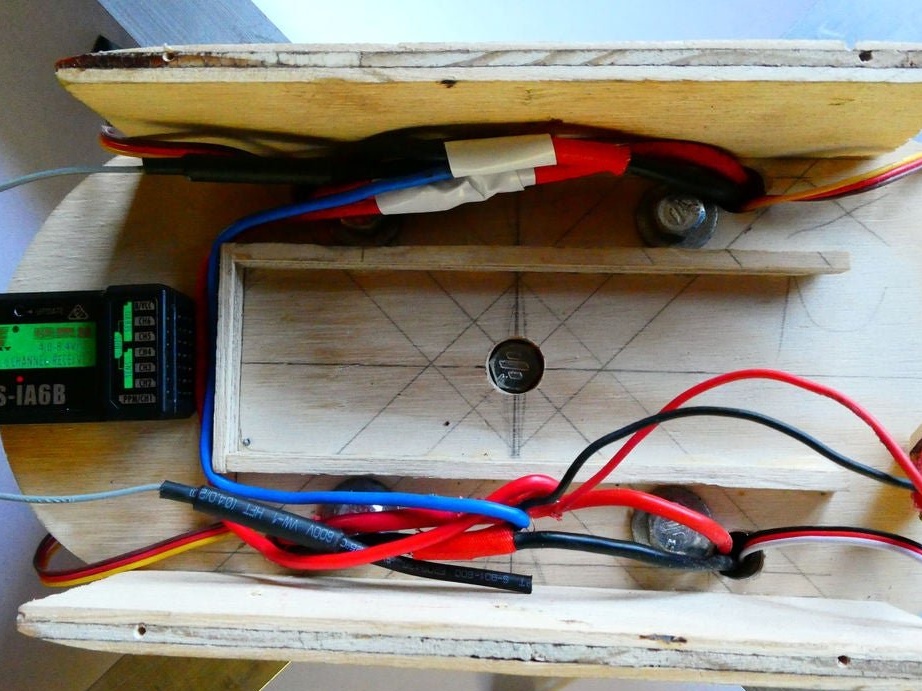
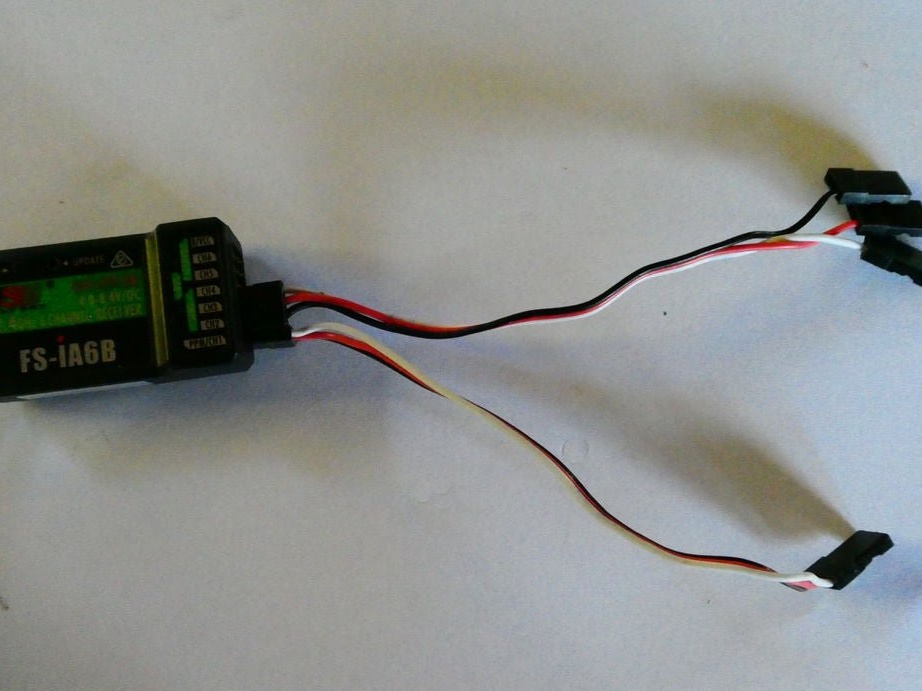
Savienojiet visus melnos (mīnus) un visus sarkanos (plus) vadus kopā. Divus vadus pielodējiet pie XT60 savienotāja (sarkanā un melnā). Nostipriniet uztvērēju pie šasijas, izmantojot abpusēju lenti.
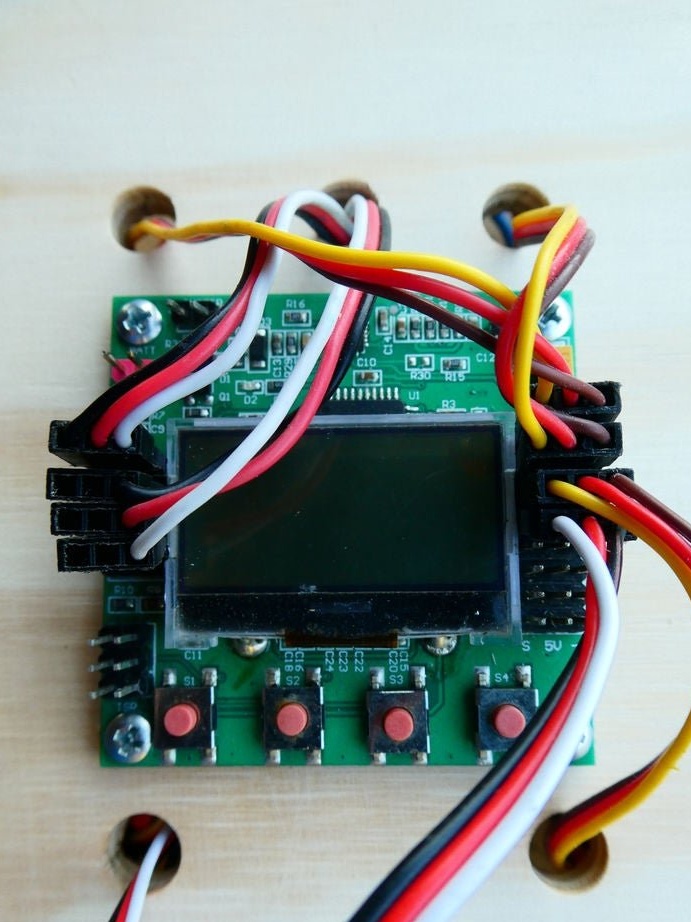
Izvelciet vadus no regulatora un uztvērēja caur caurumiem nodalījuma vākā, pēc tam pieskrūvējiet vāku. Pieskrūvējiet kontrolieri pie vāka. Pievienojiet vadus lidojuma vadības panelim.
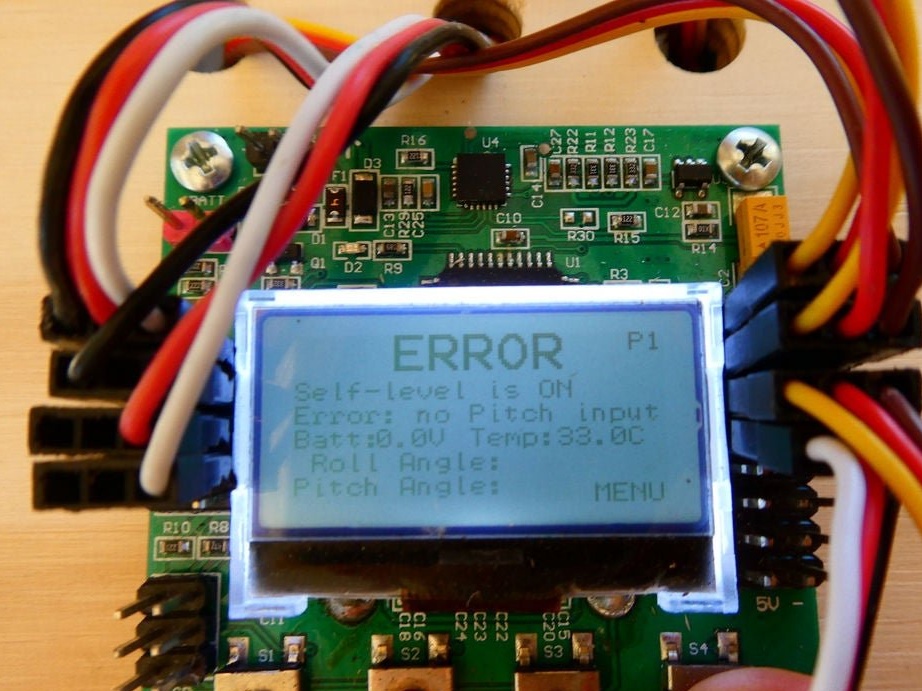
Ceturtais solis: iestatīšana
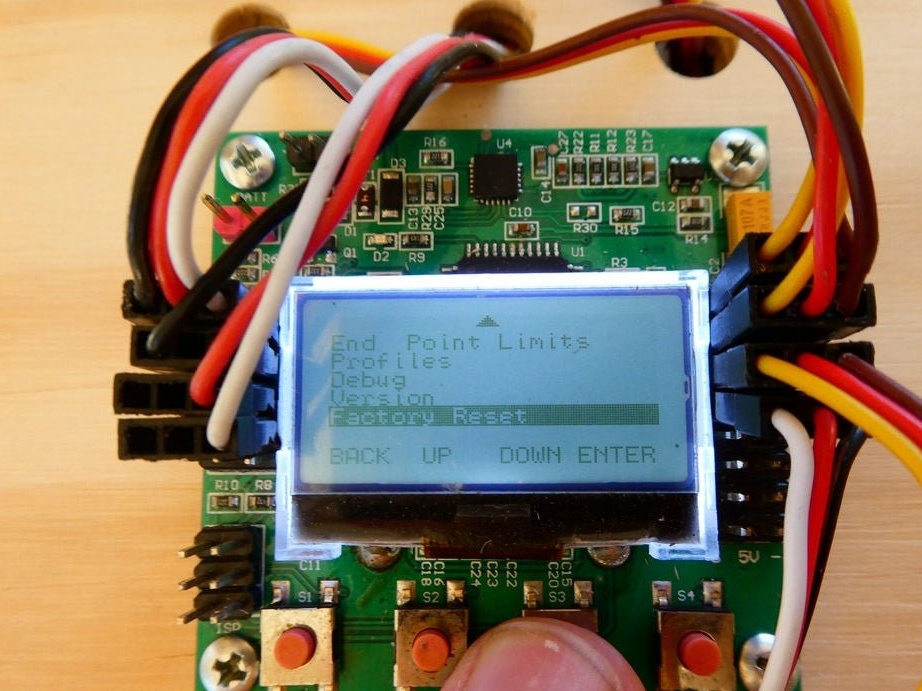
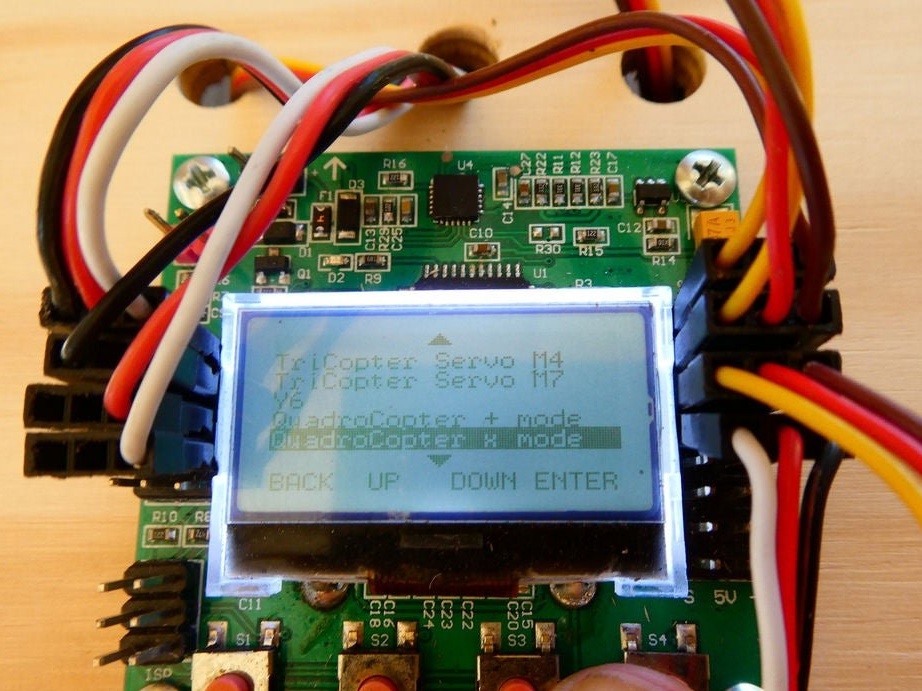
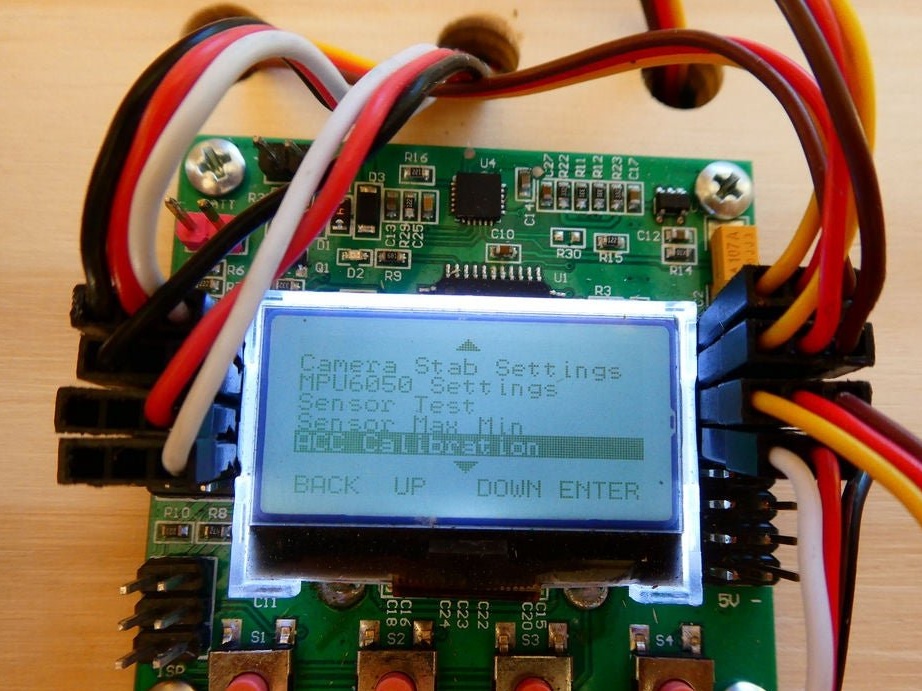
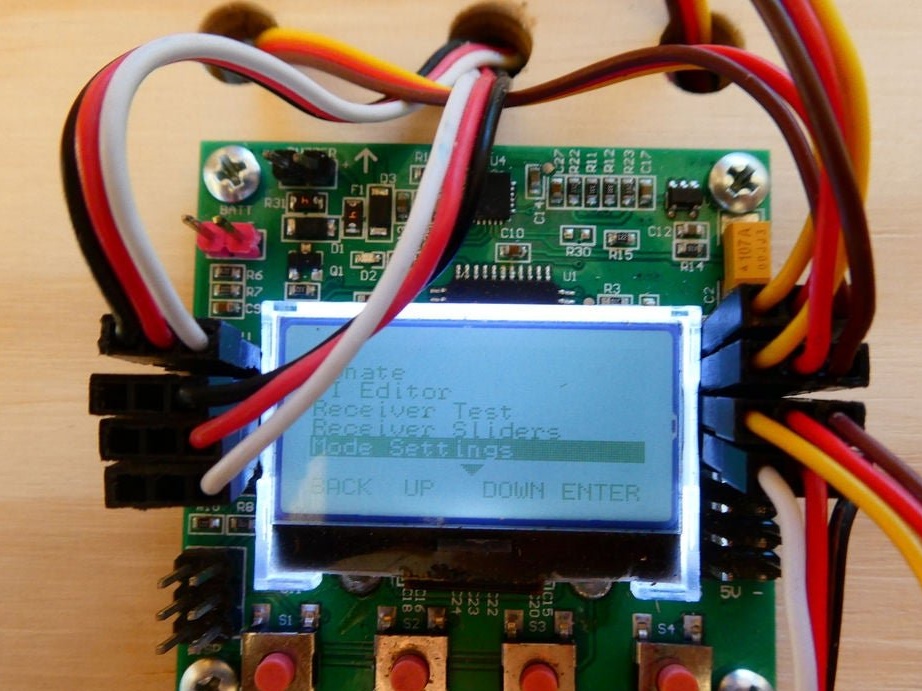
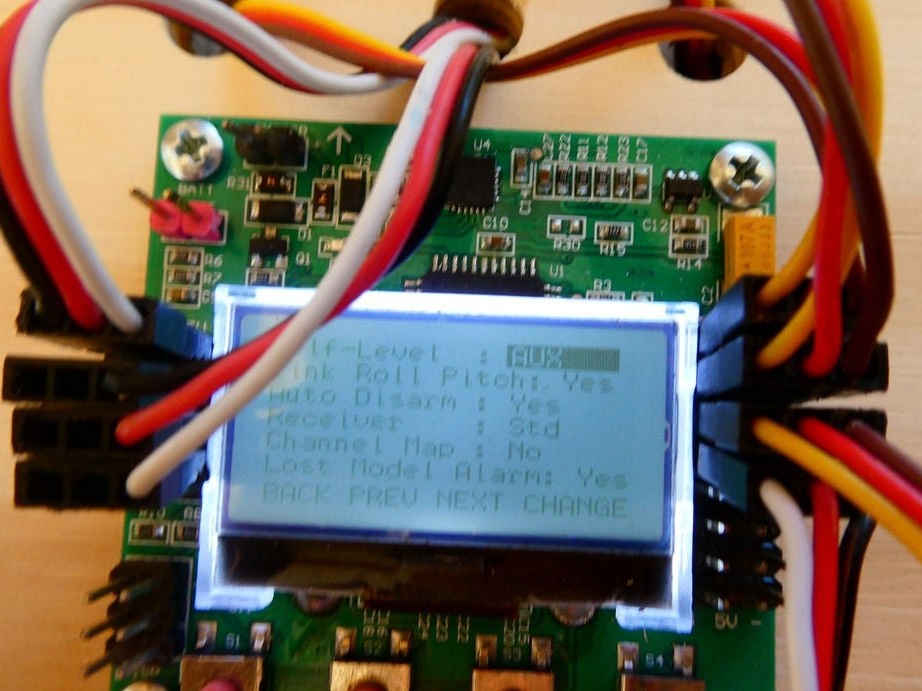
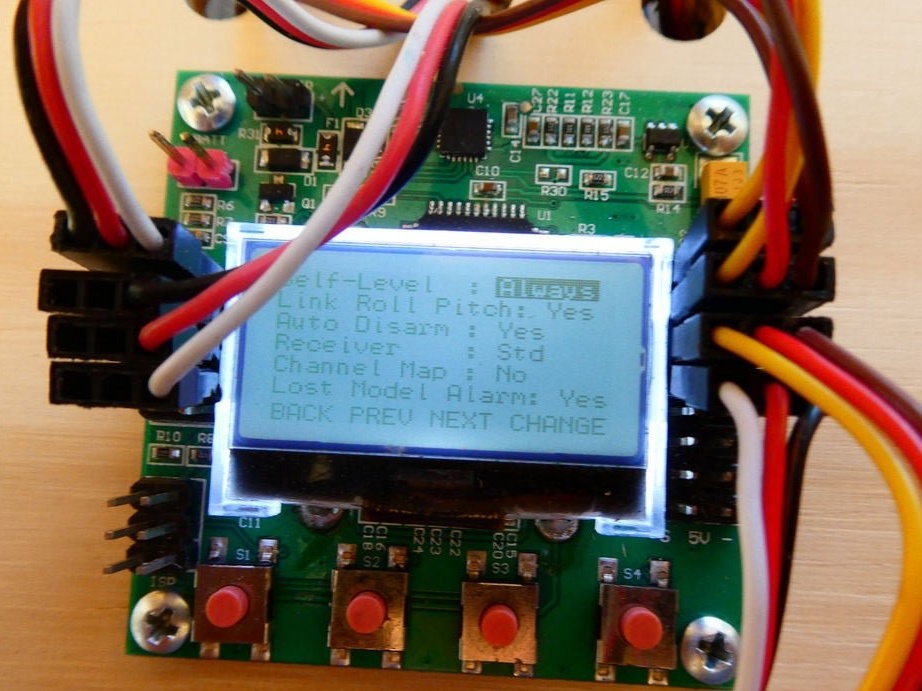
Pievienojiet akumulatoru un regulatoram vajadzētu boot. Displejā vajadzētu parādīties kļūdas ziņojums. Ignorējiet to un nospiediet izvēlnes pogu. Ritiniet uz leju un noklikšķiniet uz “atiestatīt”. Tad vajadzētu parādīties izvēlnei, lai izvēlētos vajadzīgo dronu kadru. Ritiniet uz leju, līdz atrodaties Quadcopter-X režīmā, un nospiediet “akceptēt”. Nospiediet atpakaļ un atlasiet “AUX kalibrēšana”. Novietojiet dronu uz līdzenas virsmas un nospiediet “kalibrēt”. Kad tas ir izdarīts, ritiniet līdz režīma iestatījumiem un mainiet automātisko līmeni no “AUX” uz “Vienmēr”.
Izslēdziet akumulatoru, ieslēdziet kontrolieri un pēc tam atkal pievienojiet akumulatoru. Lidojuma kontrolierim vajadzētu ieslēgties un parādīt DROŠU. Pārvietojieties pa kreisi uz kreiso stūri, un displejam vajadzētu mainīties no SAFE uz ARMED,
Piektais solis: dzenskrūves
Piestipriniet skrūves pie motora vārpstām.


Viss ir gatavs. Visbeidzot, daži padomi no kapteiņa.
Sākumā kvadrocopteru var šķist grūti kontrolēt. Labākais veids, kā sākt lidojumu, ir kāpt apmēram 1 metru virs zemes un lidot uz priekšu un atpakaļ, pa kreisi un pa labi, un pēc tam sākt kvadriciklu aplī. Quadcopter nepatīk “mazgāšana”, tāpēc iemācieties darboties nevainojami.
Sākot lidot, turiet drona aizmuguri pret sevi, lai jūs vienmēr zinātu.
Oglekļa šķiedras skrūves ir stiprākas nekā plastmasas skrūves, un tās nesadalās.


