Meistaru jau sen interesē gaisa kuģu modeļi. Sākumā tas bija lidmašīnu modelis, pēc tam kvadrocopteri. Šajā rakstā vednis jums pateiks, kādus materiālus izvēlēties kvadrocopterim, kā arī to, kā izgatavot rāmi no saplākšņa. Noskatīsimies īsu demonstrācijas video.
Lai izgatavotu kvadrocopteru, kapteinis izmantoja sekojošo
Instrumenti un materiāli:
-Birza saplāksnis;
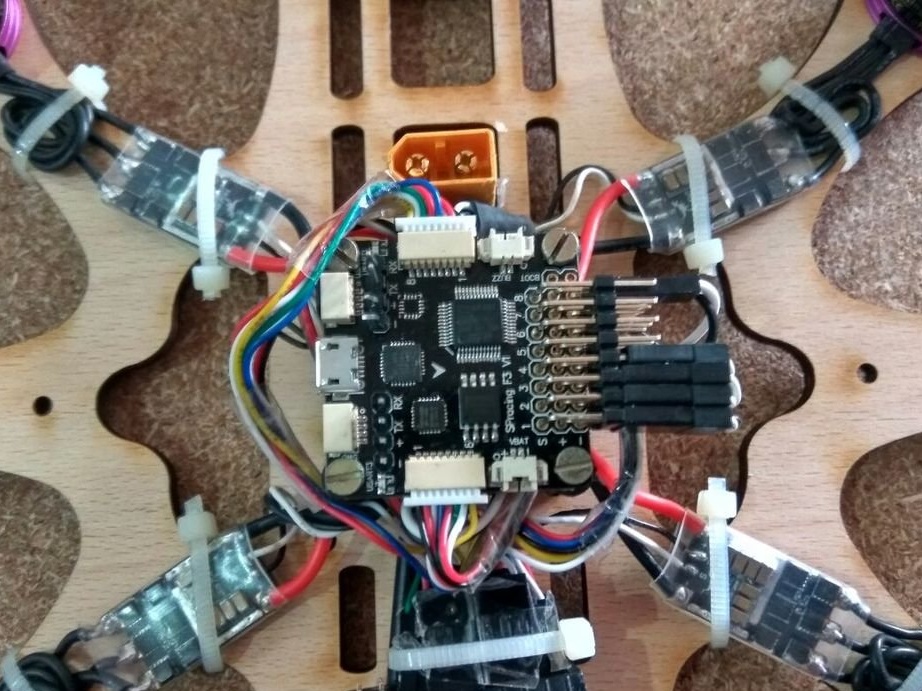
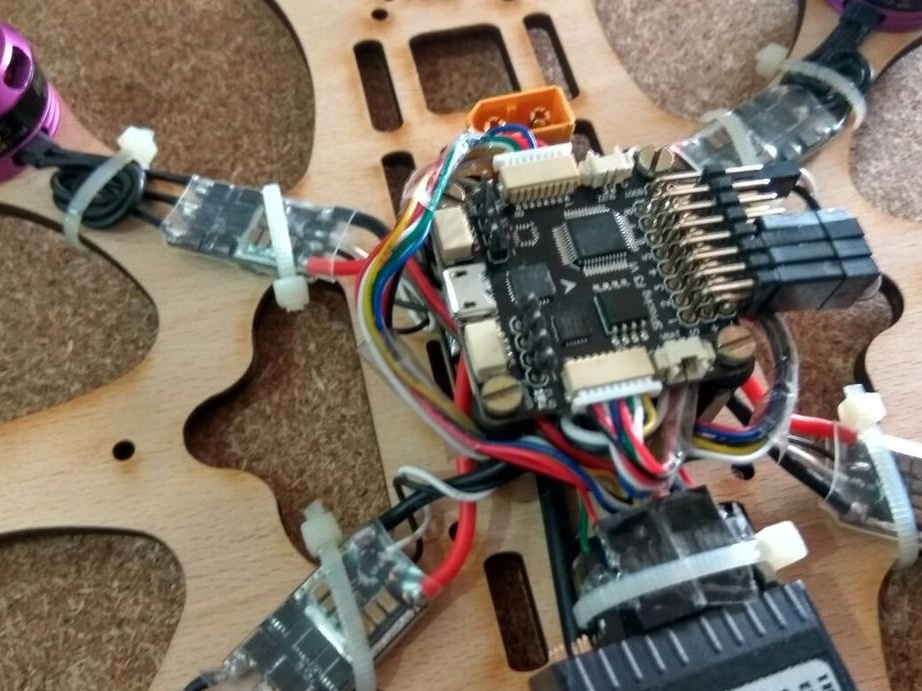
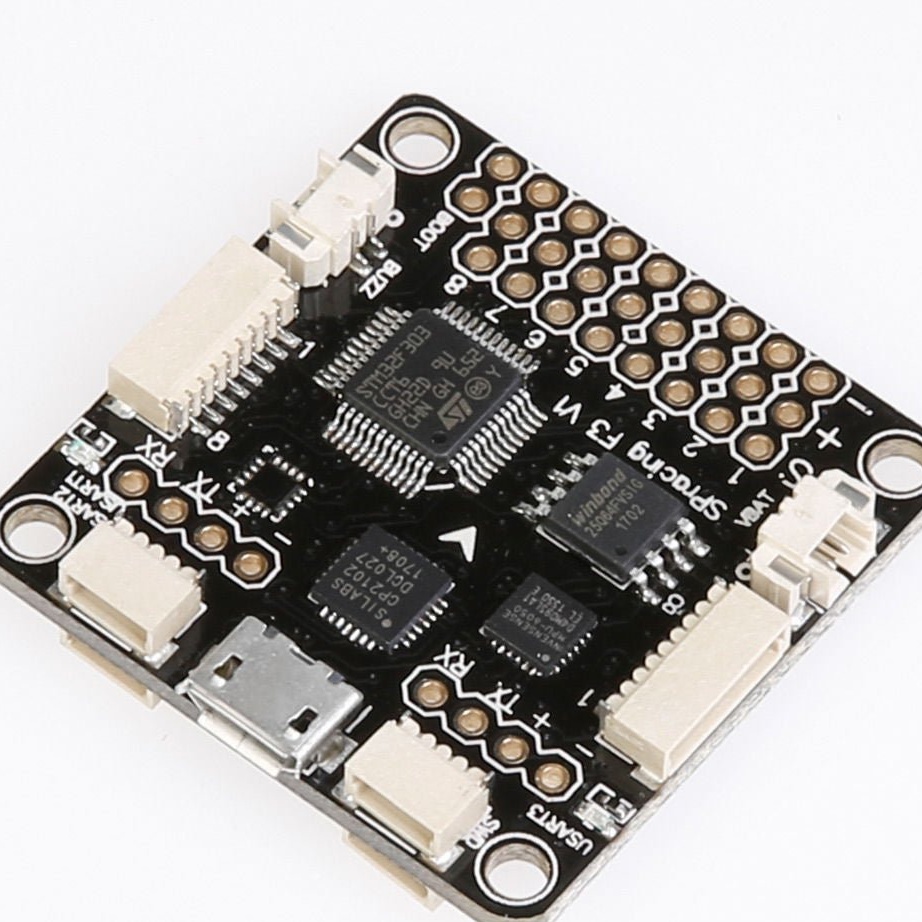
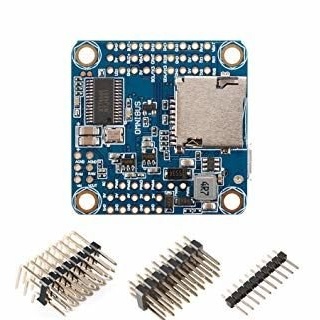
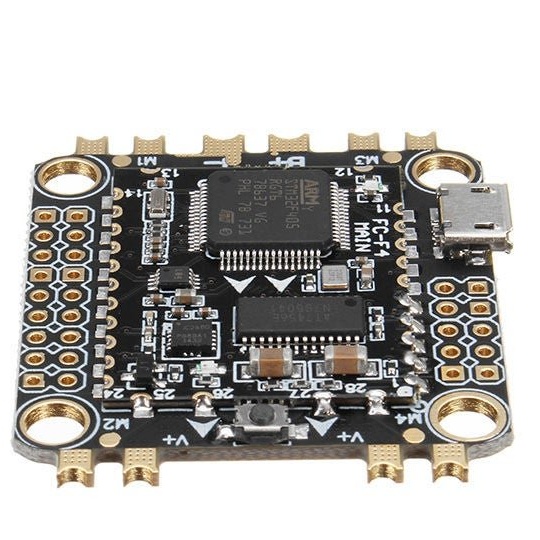
-Omnibus F4 kontrolieris, SP Racing F3;
-Mateck enerģijas sadales plate;
- kontrolieris HGLRC 28A BLHeli ESC - 4 gab .;
- Motor Racestar BR2204 2600Kv Racing Edition -4 gab .;
- dzenskrūves KingKong 5X4X3 - 4 gab .;
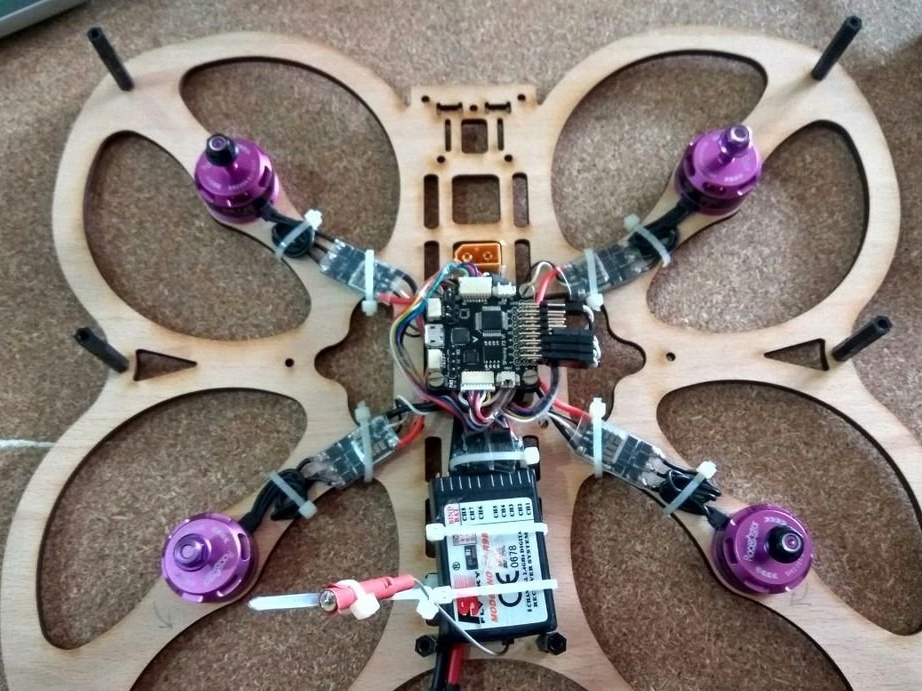
- radio modulis Flsky TH9X ar uztvērēju;
Akumulatora Gens 3800 mAh;
-Piekabes; - 16 gab .;
-Skrūves M3;
- skrūvgriezis;
-Līmēšanas piederumi;
-Knifele;
- CNC griezējs;
Pirmais solis: materiāla izvēle
Rāmis.
Parasti rāmis ir izgatavots no vieglām un stingrām sastāvdaļām, piemēram, stiklplasta, oglekļa šķiedras, koka, alumīnija utt. Ir daudz dažādu rāmju veidu, kapteinis izgatavos rāmi četriem motoriem.
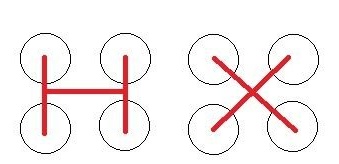
Šādi rāmji galvenokārt ir H vai X formā. X forma ir labs līdzsvars starp stabilitāti un manevrēšanas spēju. Tieši šo rāmi meistars izveidos.

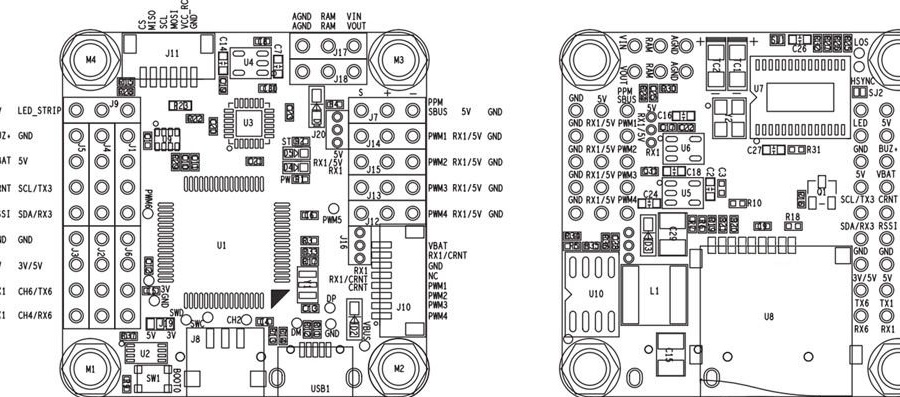
Kontrolieris
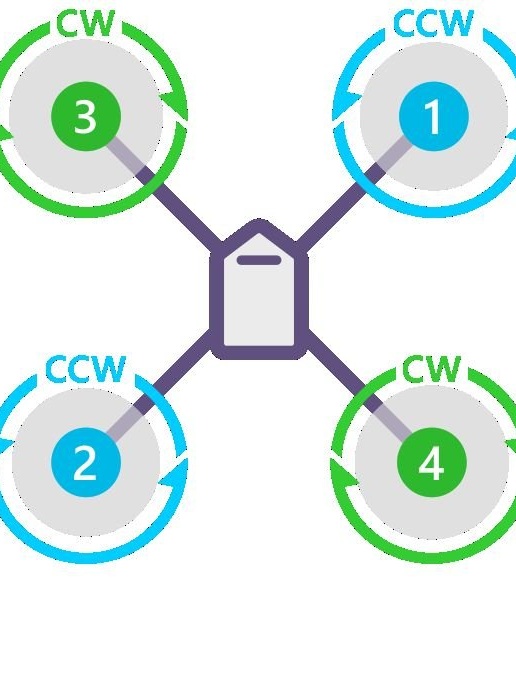
Kontrolieris kontrolē motoru darbību. Diagramma parāda, ka visi motori griežas pretējos virzienos, lai neitralizētu katra dzinēja radīto griezes momentu. Kontrolieris ir kvadrocoptera smadzenes, tas būtībā ir mazs dators, kas savus sensorus izmanto, lai pastāvīgi mērītu leņķi un ātrumu.
Lidojuma kontrolieri galvenokārt tiek klasificēti atbilstoši procesora specifikācijām.

Dzinēji
Ir divu veidu motori, bezkontaktu motori un bezkontaktu motori. Lielākajā daļā kvadrocopteru tiek izmantoti bezkontakta motori, kas ļoti ātri var reaģēt uz ātruma un griezes momenta izmaiņām. Motoriem bez suku, īpašs elektroniska ātruma kontrolieris (ESC).
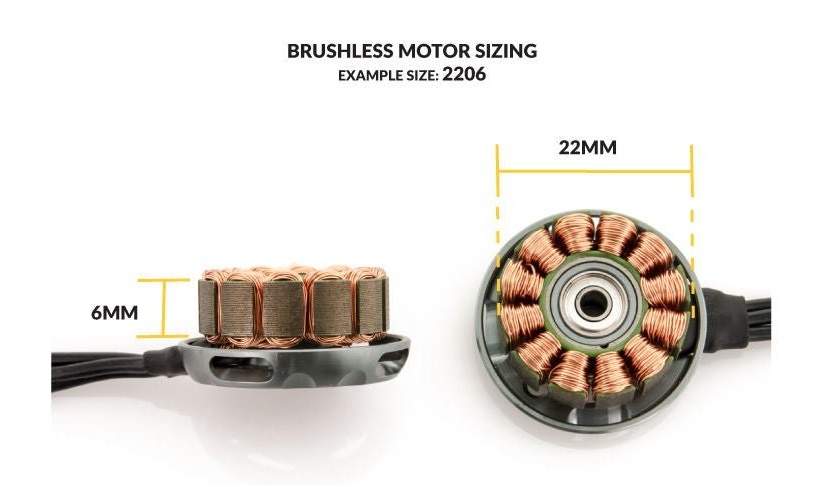
Bezkontakta motoru lielumu norāda četrciparu skaitlis - AABB. “AA” ir statora platums, un “BB” ir statora augstums vai statora diametrs, abi izteikti mm (milimetros). Piemēram, Racestar BR2205 ir stators ar diametru aptuveni 22 mm un augstumu aptuveni 05 mm.
Faktiski, jo augstāks ir stators, jo lielāka jauda pie lielākiem ātrumiem, un jo platāks ir stators, jo lielāks griezes moments ir zemāks ātrums.
Motora KV vērtība norāda ātrumu, ar kādu motors griezīsies, kad tā tinumiem pieliekat 1 voltu.To nosaka ar vara stieples tinumu skaitu motora statorā un magnētu magnētisko spēku.
Mazāks tinums nozīmē mazāku pretestību, un līdz ar to lielāku apgriezienu skaitu minūtē. Tāpēc motoriem ar augstāku KV parasti ir mazāks statora tinums.
KV nosaka, kuru skrūvi jūs varat izmantot ar motoru. Jo zemāks ir KV, jo lielāku skrūvi tas var pagriezt, un otrādi. Pacelšanas spēku nav iespējams palielināt, uzstādot motorā lielāku skrūvi ar augstāku KV, jo griezes momenta prasības pārsniegs pieļaujamo jaudu un motors pārkarst.
Piemēram: BR2205 2600 kV motori var darboties ar 5x4 collu skrūvēm, un BR2212 1000 kV motori var darboties ar 10x4,5 collu skrūvēm
KV nekādā ziņā nav motora jaudas rādītājs; dzinēji ar augstāku KV nav obligāti jaudīgāki nekā dzinēji ar zemāku KV.


Elektroniskie ātruma kontrolieri (ESC).
Jaunākos sasniegumus mini kvadrocopteros ļāva ieviest mazi elektroniski ātruma kontrolieri, kas ļauj darbināt bezmotoru motorus. Elektronisko ātruma kontrolieru darbība ir saistīta ar droseles signāla saņemšanu no lidojuma kontroliera un motora rotācijas uzturēšanu vajadzīgajā ātrumā.
Šajās mazajās ierīcēs darbojas vairākas tehnoloģijas, kuras neietilpst šīs rokasgrāmatas darbības jomā. Pērkot, izvēlieties ESC ar nominālo līdzstrāvu, kas vismaz par 20% pārsniedz aprēķināto.


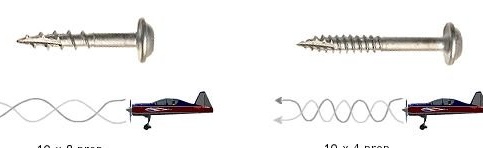
Propelleri.
Propelleri pārveido motoru mehānisko enerģiju vilcē. Propellera izmēram un formai ir milzīga loma lidojuma efektivitāti.
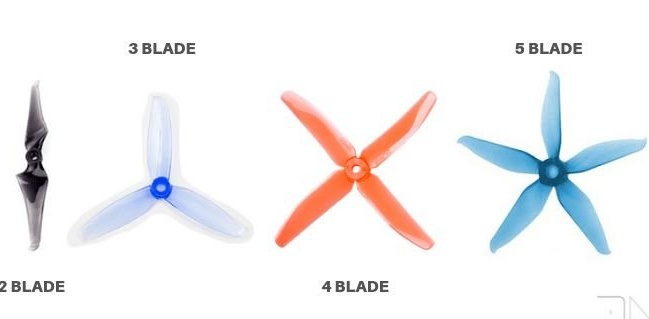
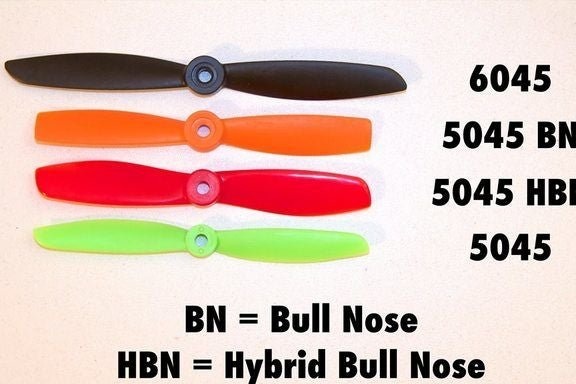
Ir 2 veidu formāti, kurus ražotāji izmanto: L x P x B | LLPP x B. Kur L ir garums, P ir piķis, B ir asmeņu skaits.
Propelleri var būt izgatavoti no dažādiem materiāliem, piemēram, plastmasas kompozītmateriāla, oglekļa šķiedras, koka utt. Katram materiāla veidam ir unikālas īpašības, piemēram, oglekļa šķiedra un koks ir patiešām stingri un pazīstami ar vienmērīgu darbību, un dažas plastmasas ir īpaši izturīgas. Lielākā daļa skrūvju, ko izmanto mini kvadrocopteros, ir izgatavotas no plastmasas kompozītiem.
Dzenskrūves izmēru, kuru varat izmantot, ierobežo jūsu rāmja izmērs, kā arī jūsu motora HF jauda. Kā likums, jo vairāk dzenskrūves jūs varat izmantot, lai izveidotu noteiktu vilci, jo efektīvāka tā būs. Mini kvadrocopteriem tie atšķiras no 5 līdz 6 collu skrūvēm ar 4-5 collu soli.
Lāpstiņu skaits ietekmē vilkmi un enerģijas patēriņu. Jo vairāk asmeņu, jo lielāka vilce un vairāk enerģijas tiek tērēta.

Baterijas
Pašlaik lielākajā daļā dronu tiek izmantotas litija polimēru baterijas, ko parasti sauc par Lipo baterijām. Akumulators kopā ar ESC un motoru ir četrkodolu energosistēma.
Nedomājiet par akumulatoru kā enerģijas rezervuāru, motori ļoti īsos intervālos var vilkt milzīgu daudzumu ampēru. LiPo baterijas ir elementu kopums, kuru katra nominālais spriegums ir 3,7 V. Ja nepieciešams lielāks spriegums, šīs baterijas var savienot virknē, lai izveidotu vienu akumulatoru. Sērijveidā savienotās baterijas ir apzīmētas ar burtu “S” un paralēli ar burtu “P”.
Jo vairāk šūnu ir savienotas virknē, jo lielāks spriegums un jo vairāk šūnu ir paralēli, jo lielāka ir kapacitāte.
Piemēram:
1S = 1 šūna = 3,7 V
2S = 2 šūnas = 7,4 V
3S = 3 šūnas = 11,1 V
4S = 4 šūnas = 14,8 V
5S = 5 šūnas = 18,5 V
6S = 6 šūnas = 22,2 V
Jauda tiek norādīta miliamperos vai “mAh”. Tas ir ampēru skaits, ko akumulators var piegādāt vienā stundā. Piemēram, 3S 2000 mAh akumulators var nodrošināt 2 A 1 stundu. Tātad, ja jūsu četrkopējs velk 20A, tad tā lidojums turpināsies 2/20 * 60min = 6 minūtes.
Nominālā izlāde norāda maksimālo ātrumu, ar kādu jūs varat iegūt strāvu no akumulatora. To norāda ar ciparu "C" augšpusē. Jo augstāks ir C vērtējums, jo lielāku akumulatora strāvas daudzumu var radīt.
Piemēram, 2000 mAh 25C akumulators var piegādāt līdz 2000x25 = 50 000 mA vai 50 A.



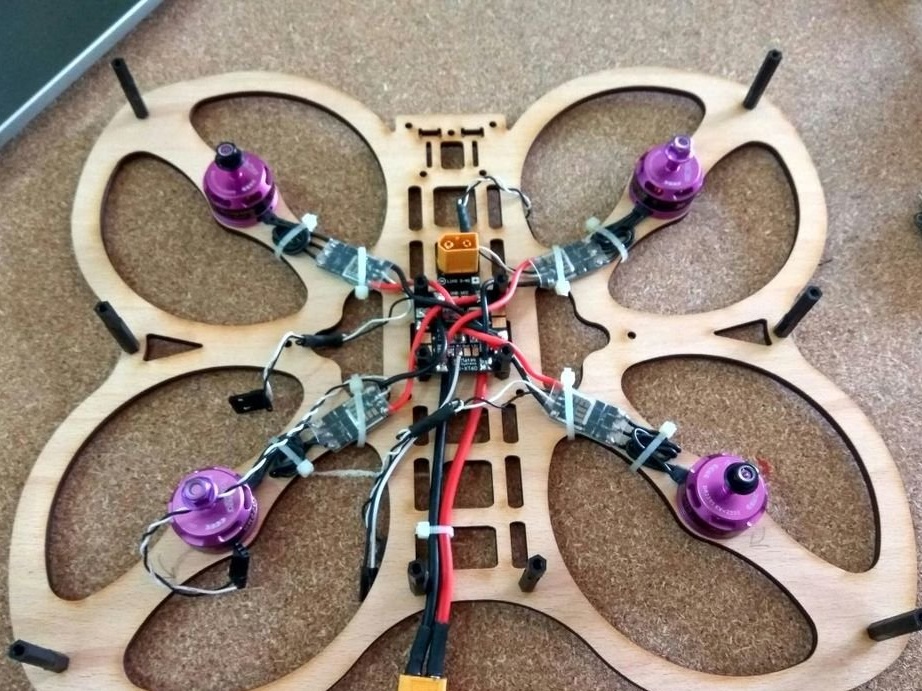
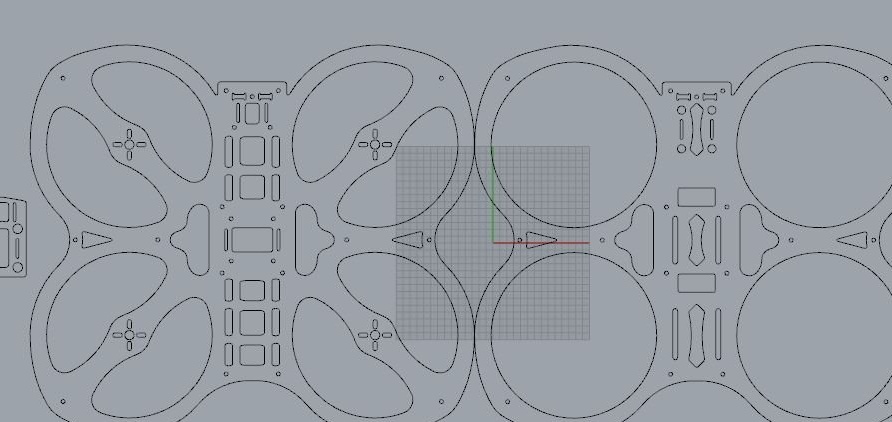
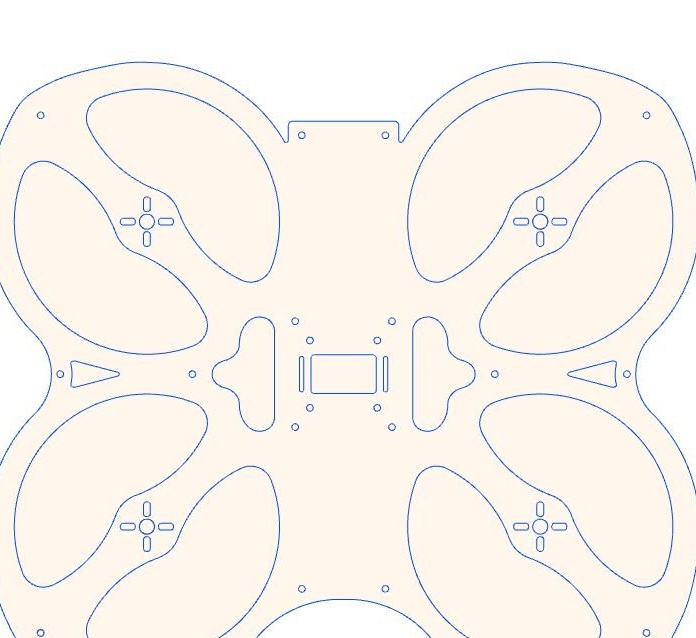
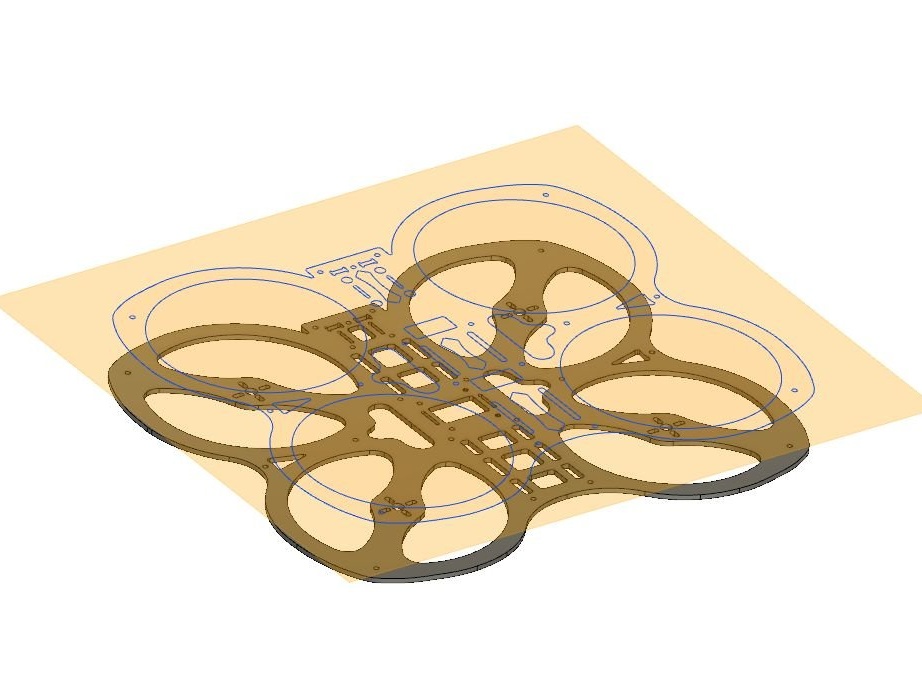
Otrais solis: rāmja dizains un montāža
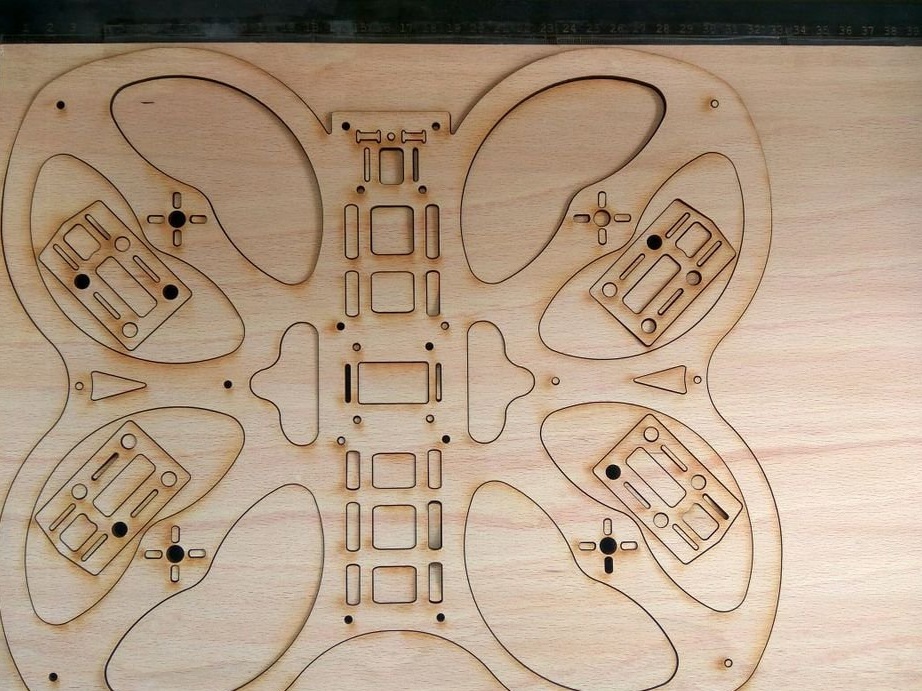
Rāmja dizainu iedvesmoja monarha tauriņa forma.Kad paskatās uz rāmi no augšas, tas izskatās kā divi spārni.
Vednis noformēja dizainu Fusion 360 un Rhino CAD. Rāmja izmērs ir aptuveni 230 mm, tas ir saistīts ar diagonālo attālumu no viena motora rumbas uz otru. Populārākie rāmja izmēri ir 210 mm, 250 mm utt. Kad esat iestatījis rāmja izmēru, uzzīmējiet motora stiprinājumus.
Centrālā ēka ir vieta, kur tiks uzstādīta visa elektronika, ieskaitot lidojuma kontrolieri, uztvērēju, akumulatoru utt. Viduspunktā ir 4 M3 caurumi, kas atrodas 30,5 mm attālumā viens no otra.
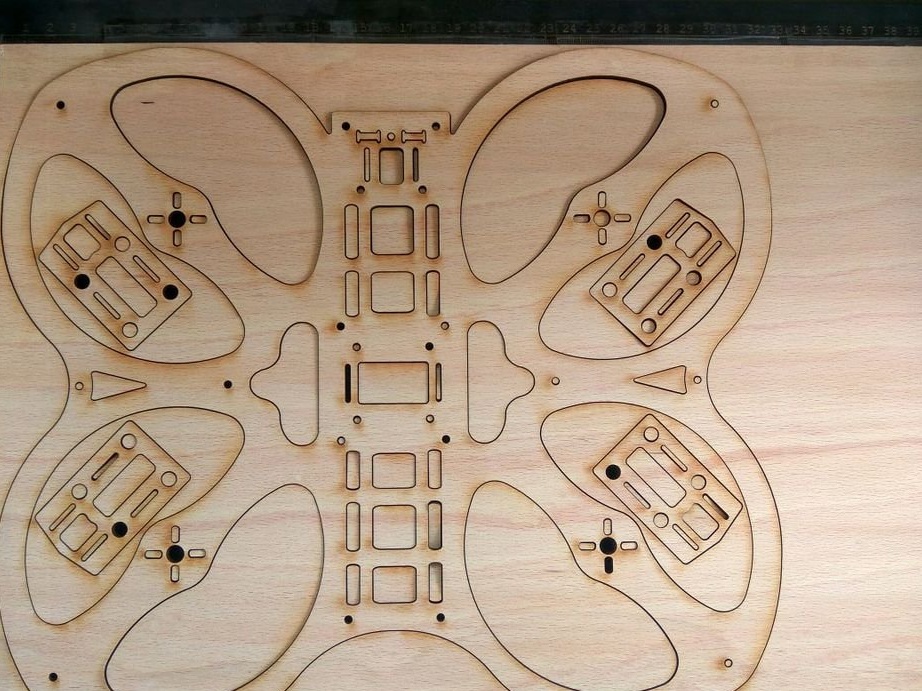
Izstrādājums tiek izgatavots, izmantojot griešanu ar lāzeru. Ja jums nav griezēja, jūs varat griezt darbnīcā. Izgriešanas failu var lejupielādēt zemāk.
Faila dizains.rar









Trešais solis: Veidojiet
Tagad jums ir jāsamontē kvadrocopters.
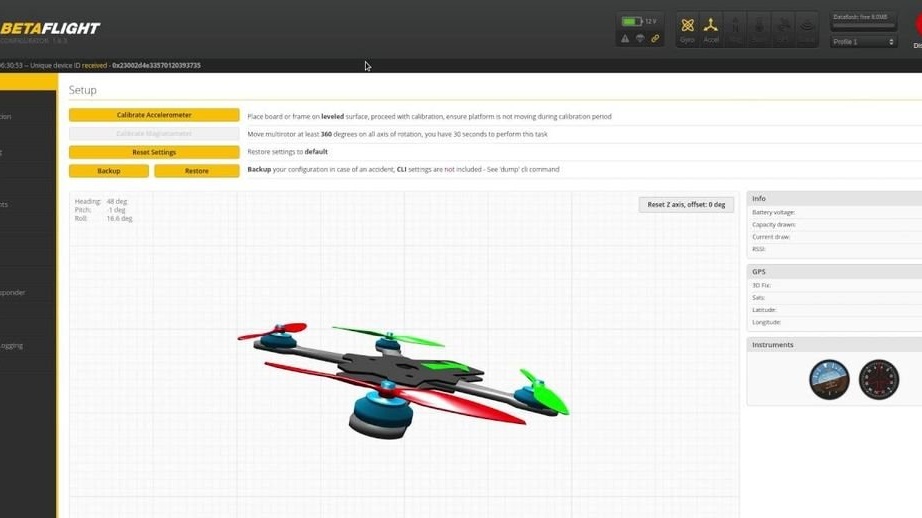
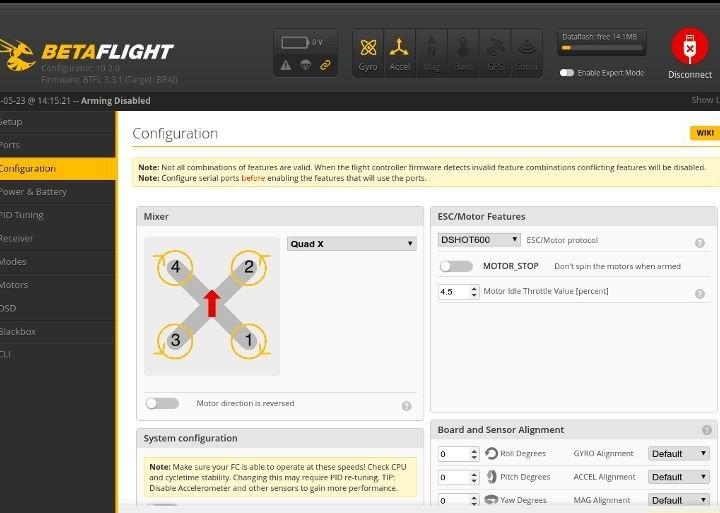
Vispirms ir jāapgaismo kontrolieris ar Betaflight programmaparatūru. Pēc tam kalibrējiet sensoru. Pievienojiet radio moduli un pārbaudiet tā darbību. Uzstādiet motorus uz rāmja saskaņā ar X-rāmja shēmu ar pareizu griešanās virzienu. Lodēt motoru ved uz ESC spailēm un piestiprināt ESC pie kronšteina. Pievienojiet strāvas sadales plati un pielodējiet ESC spilventiņus. Pievienojiet Soler XT60 pie strāvas kabeļa un pēc tam pie strāvas sadales paneļa. Piestipriniet kontrolieri. Pievienojiet vadus no ESC ar lidojuma kontrolieri. Uzstādiet uztvērēju uz rāmja. Uzlieciet augšējo vāku.