
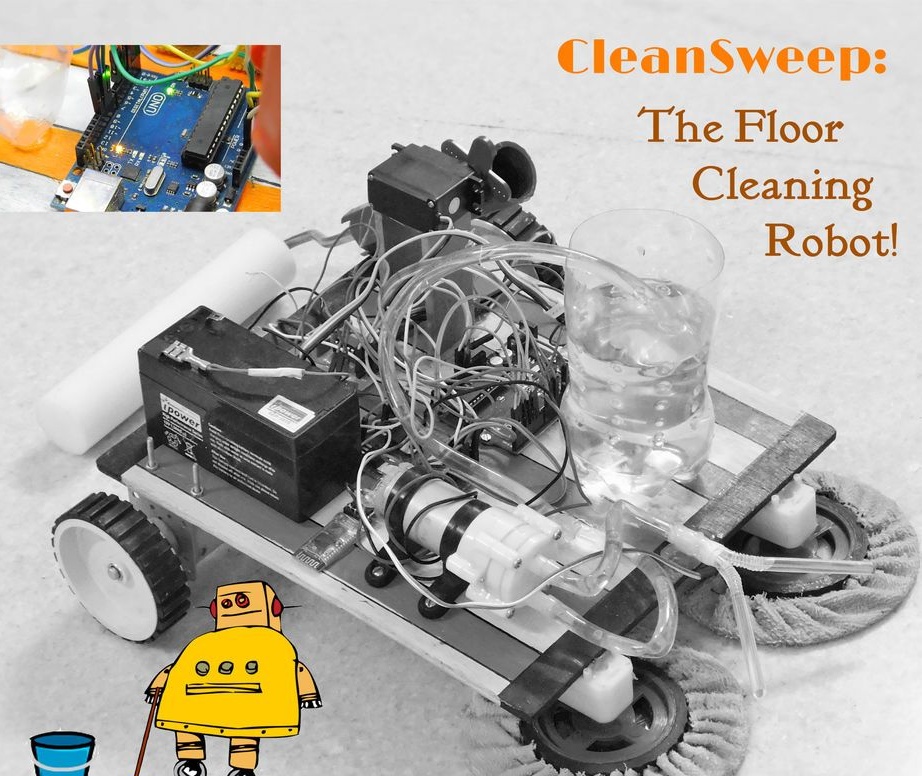
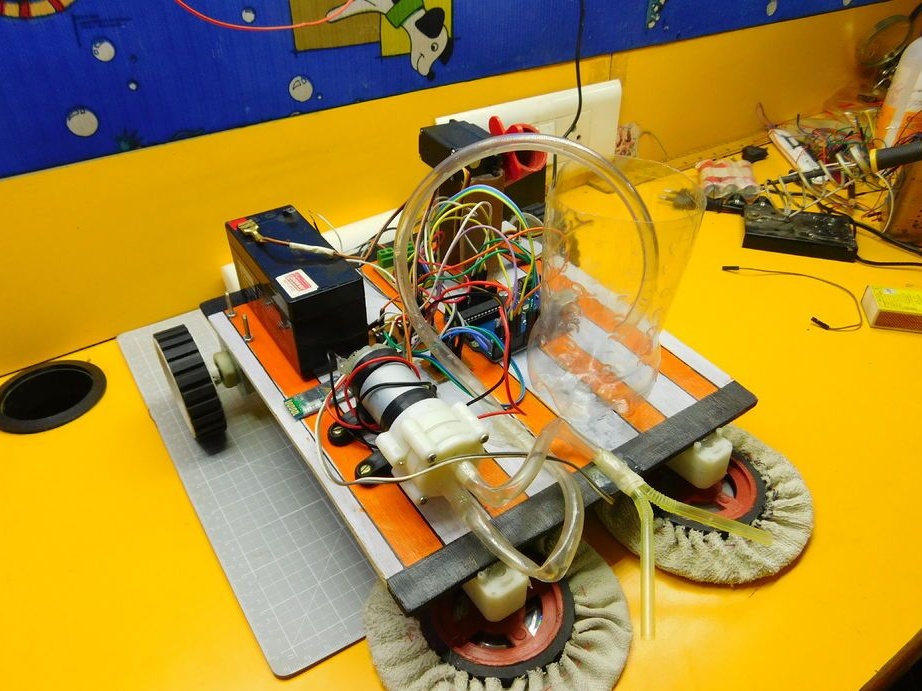


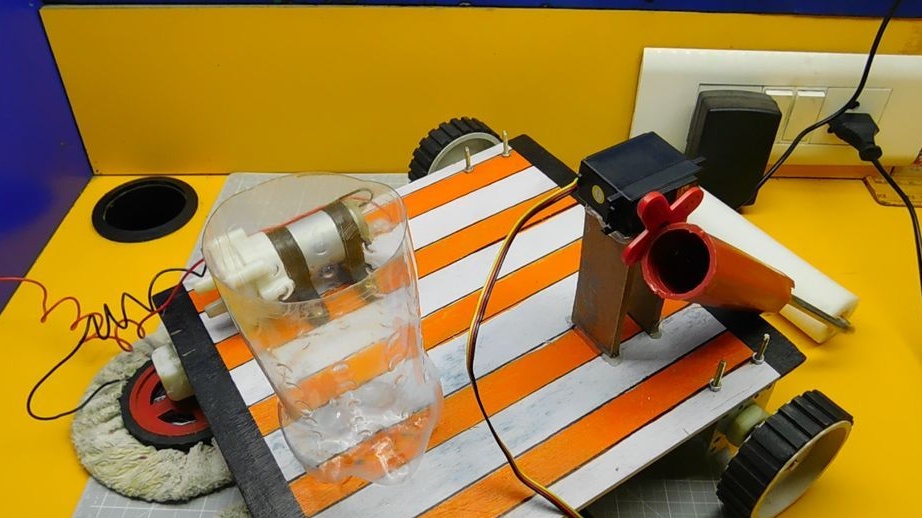
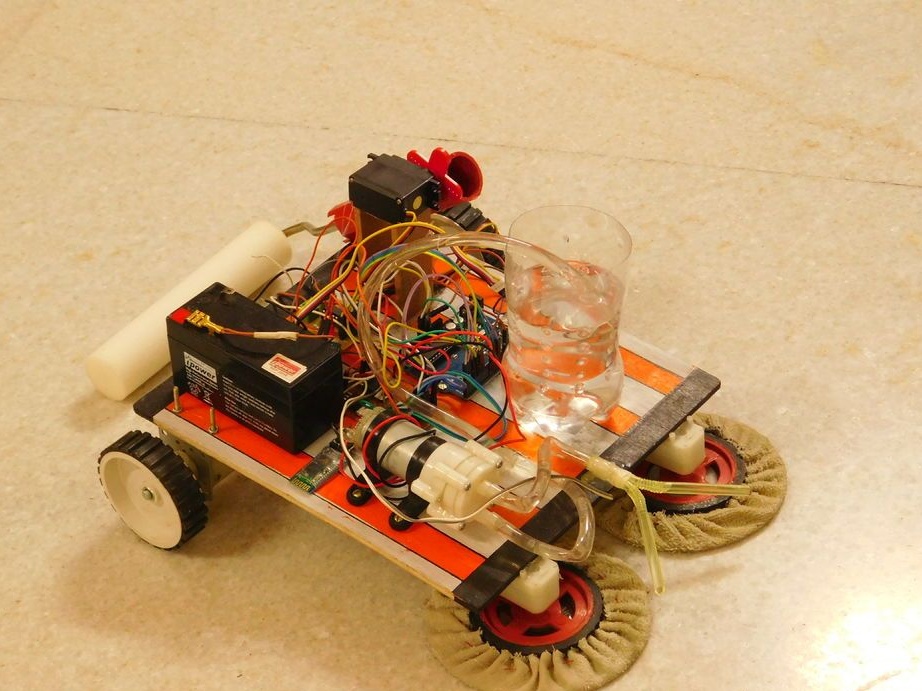
RobotsKombaina arsenālā ir divas rotējošas sukas, kas uzstādītas reduktora motora vārpstas priekšpusē. Pārnesumkārba griežas ar ātrumu 75 apgr./min. Robotam ir ūdens tvertne uz kuģa. Robota aizmugurē ir piestiprināts veltnis. Robotu sajauc ar riteņu palīdzību, kas fiksēti uz reduktora motora ass. Tīrītāju kontrolē viedtālrunis, izmantojot bluetooth. Nākotnē kapteinis plāno padarīt robotu pilnīgi autonomu. Apskatīsim, kā šī ierīce darbojas.
Instrumenti un materiāli:
-Motora pārnesums 100 apgr./min -2 gab .;
-Riteņi dzinējam -2 gab.
-Motora reduktors ar riteni 75 apgr./min - 2 gab.
-Arduino UNO;
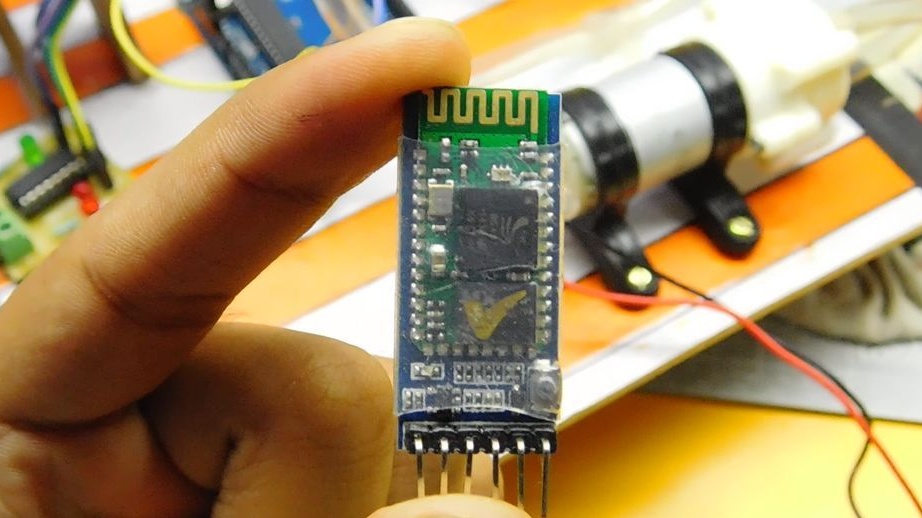
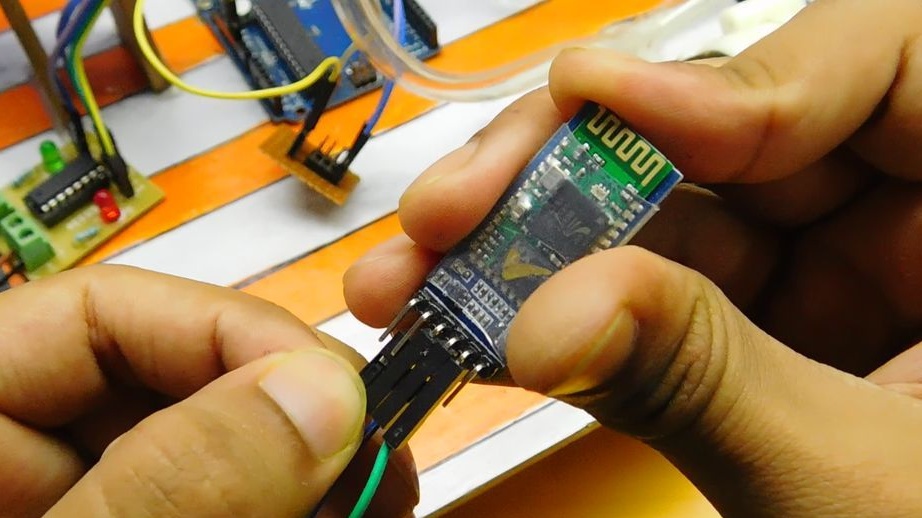
- Bluetooth modulis HC-05/06;
-Drivers L293D;
- servomotors (griešanās par 180 grādiem);
-12 V akumulators;
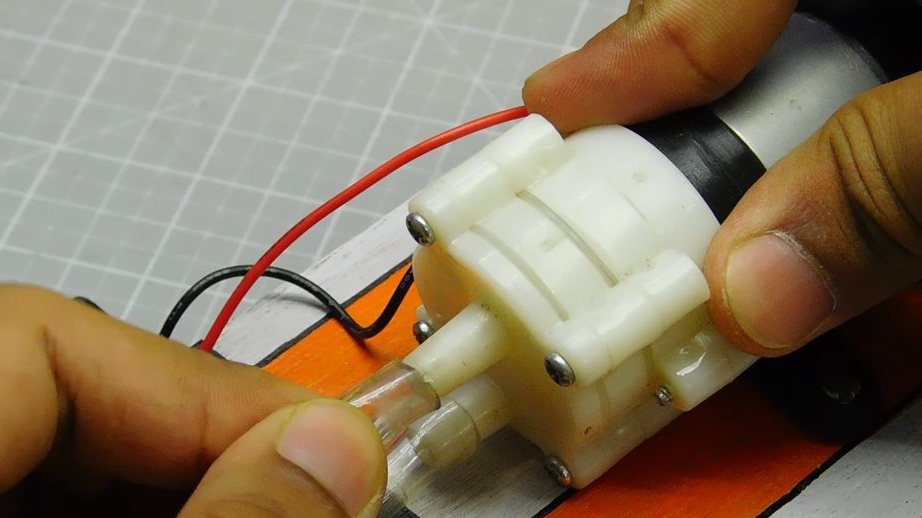
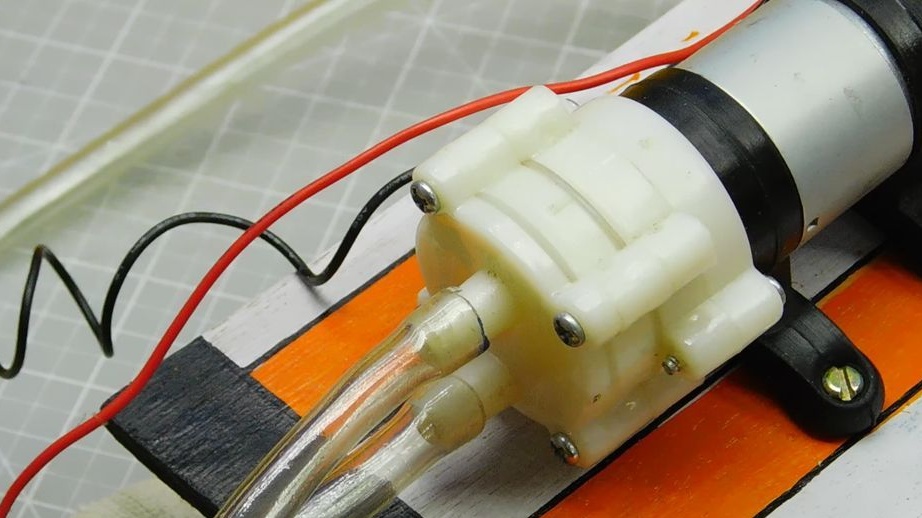
- sūknis 12 V;
Tranzistors TIP31C;
Tranzistors TIP122;
- CD diskdzinis - 2 gab .;
- krāsošanas veltnis;
- auduma salvetes;
- adata ar diegu;
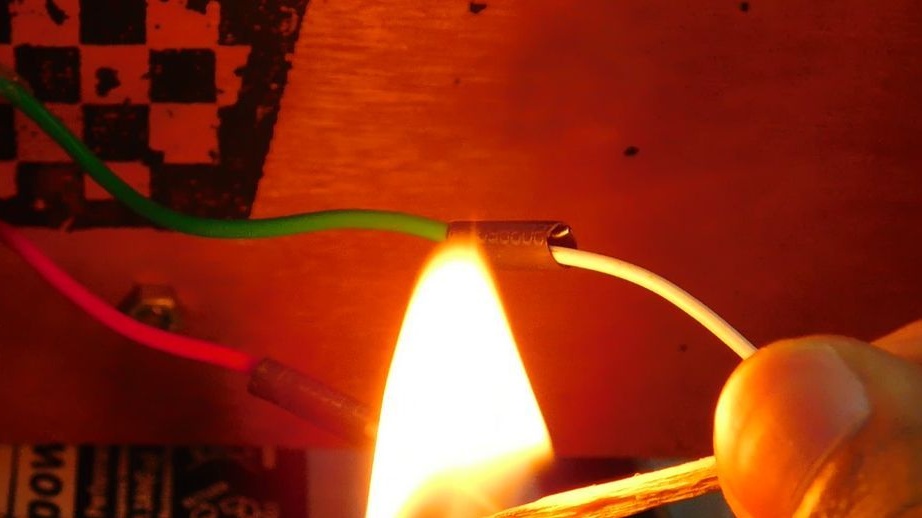
-Tube;
-Vads;
- Džemperi;
-Montāžas dēlis;
-Stiprinājumi;
-Saplāksnis;
-Plastiskā pudele;
-Kausēšanas dzelzs;
-Līmes pistole;
-Drill;
- Knaibles;
-Dremels;
- suka;
-Krāsot;
-Marķieris;
- šķēres;











Pirmais solis: Fonds
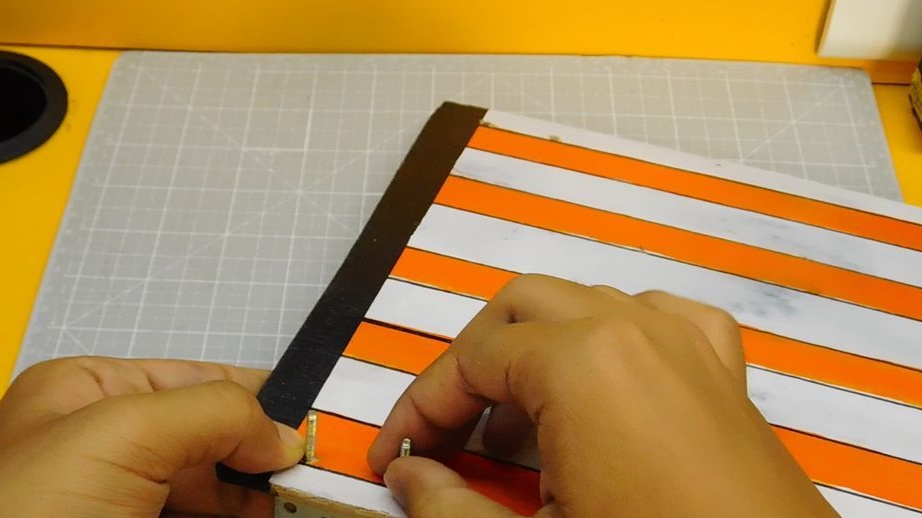
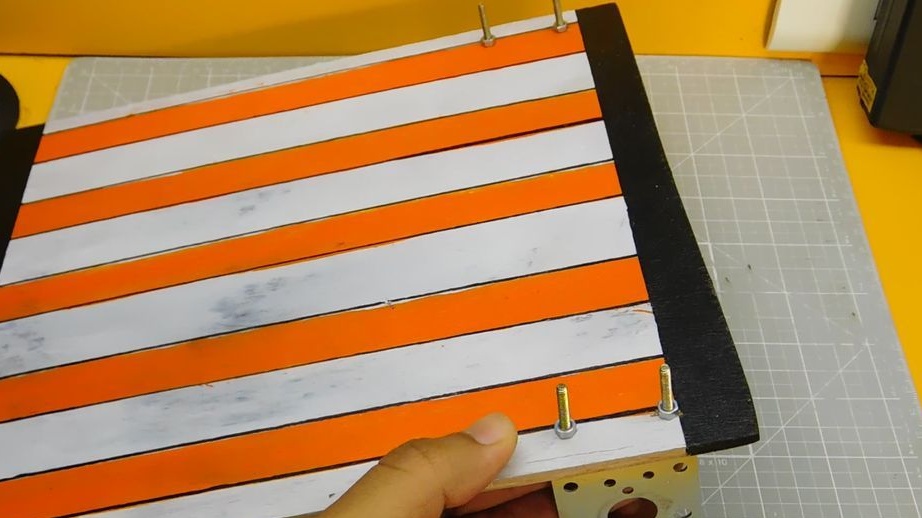
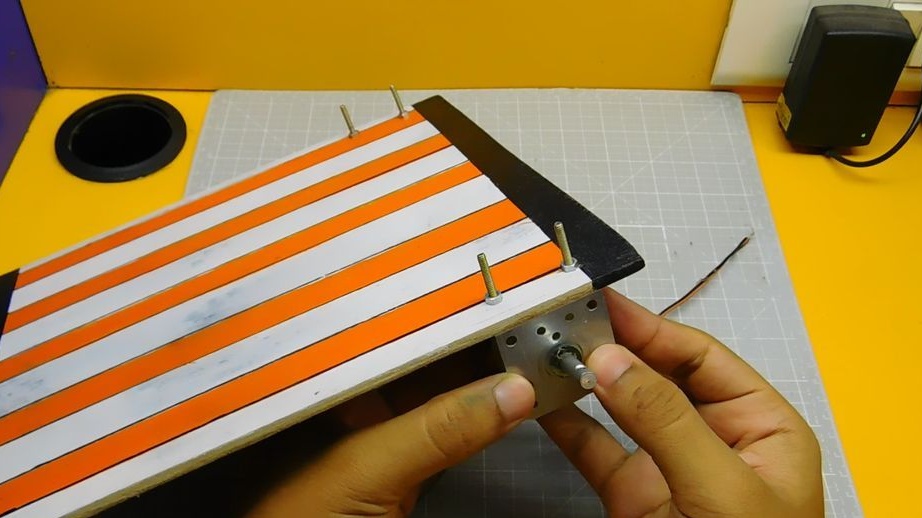
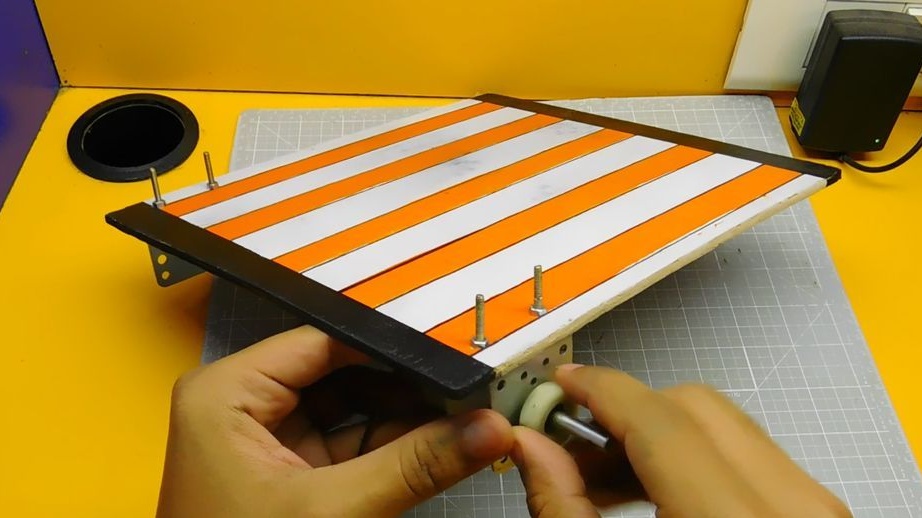
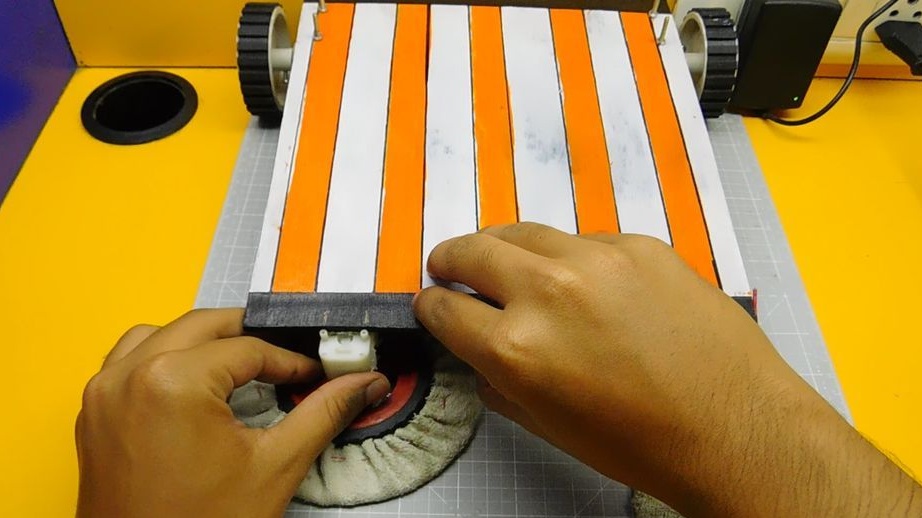
No saplākšņa izgriež pamatni. Pamatnes izmēri ir 30 * 22 cm. No vienas puses, tas fiksē reduktoru. Koaksiāli nostiprina pārnesuma motoru pamatnes otrajā pusē.



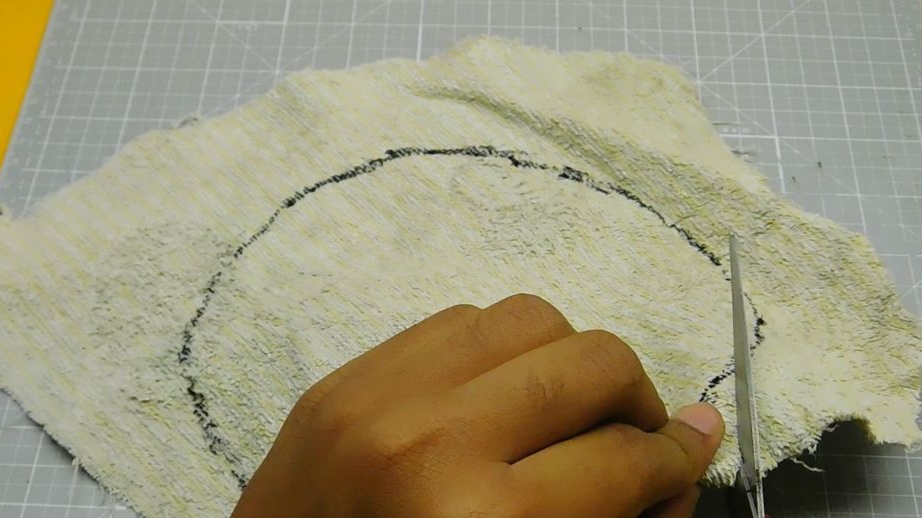
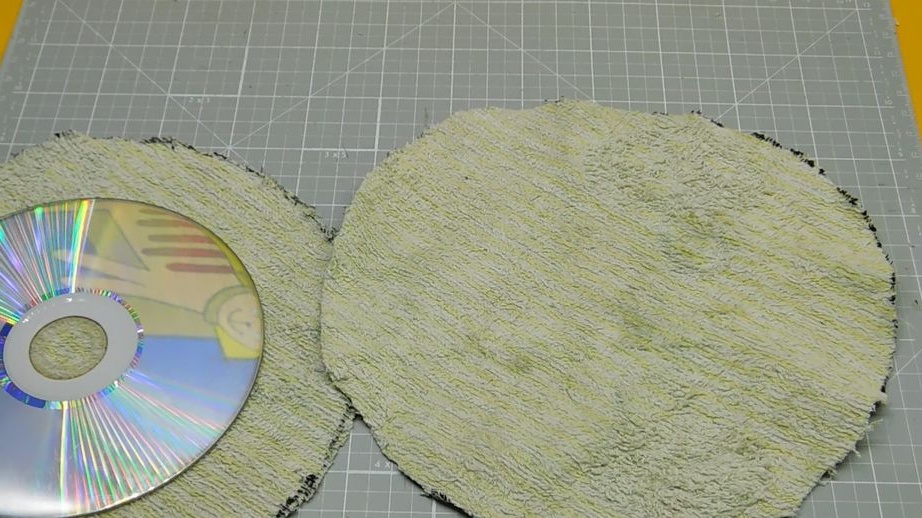
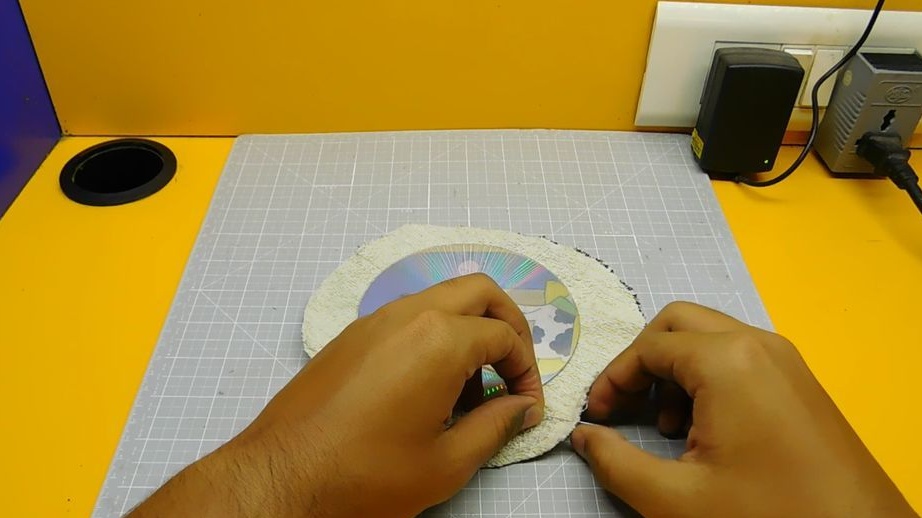
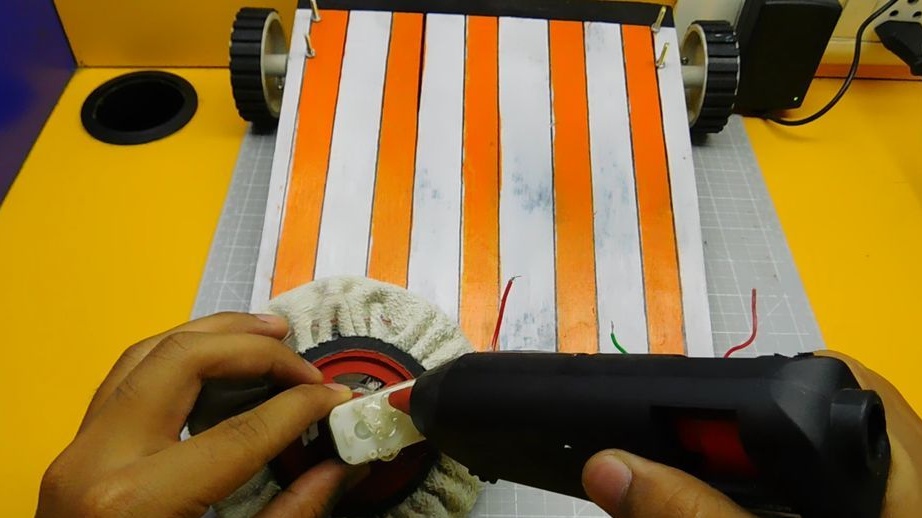
Otrais solis: sukas
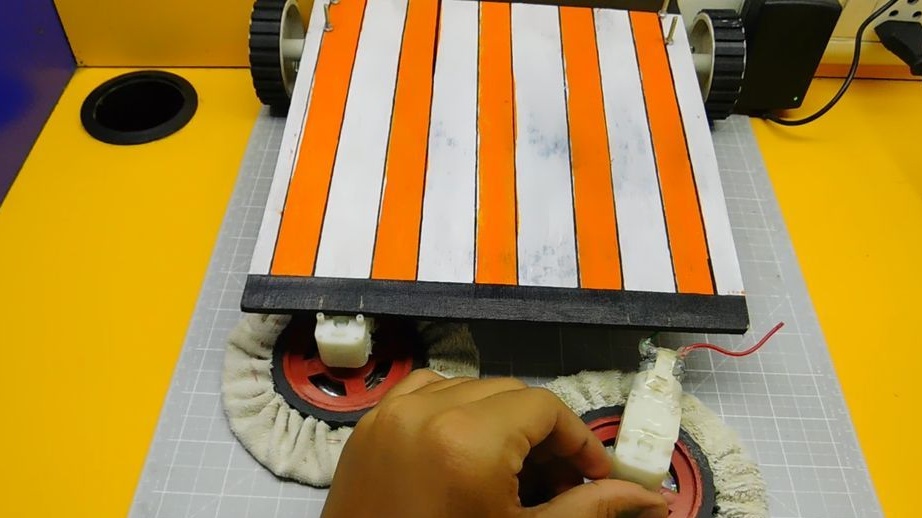
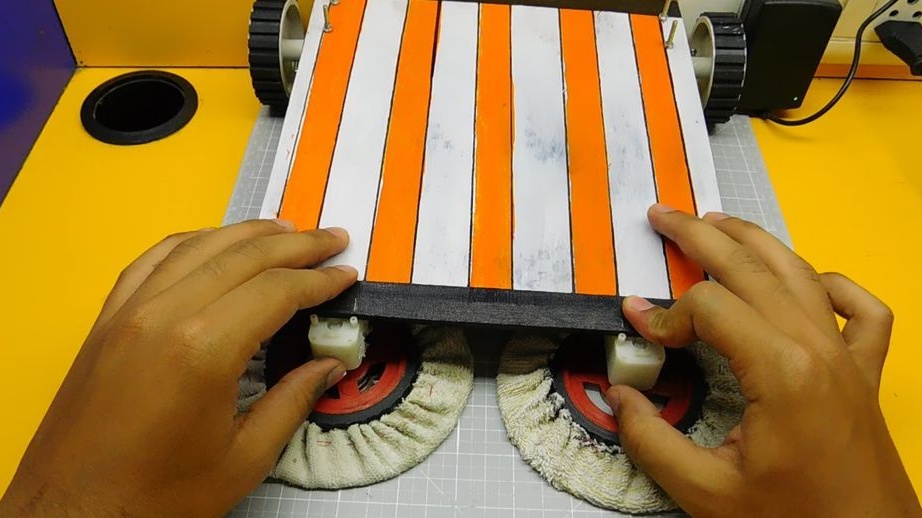
Meistars izgatavoja sukas no veciem kompaktdiskiem. Nogrieziet lupatu. Apšuva savu piedziņu. Atkārtota darbība ar citu disku. Nostipriniet diskus ar karstās kausēšanas līmi uz reduktora motora riteņa. Nodrošināja abus pārnesuma motorus platformas priekšā.








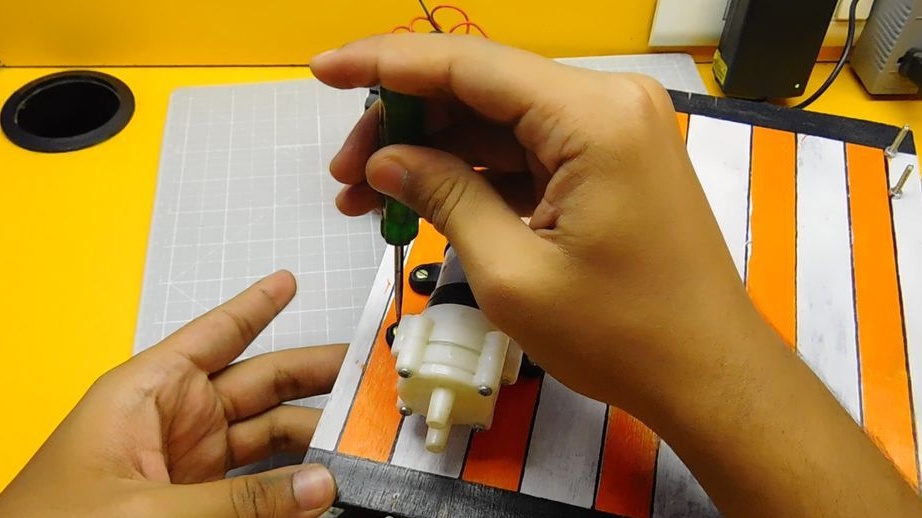
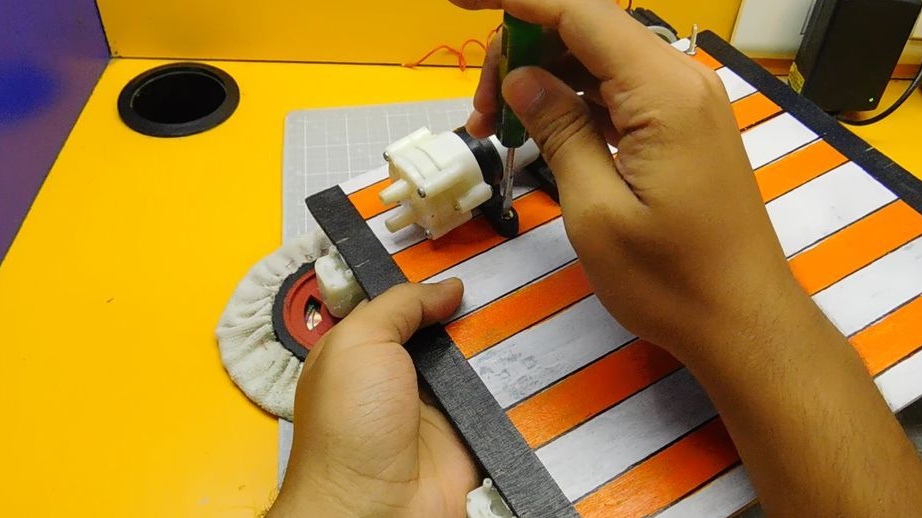
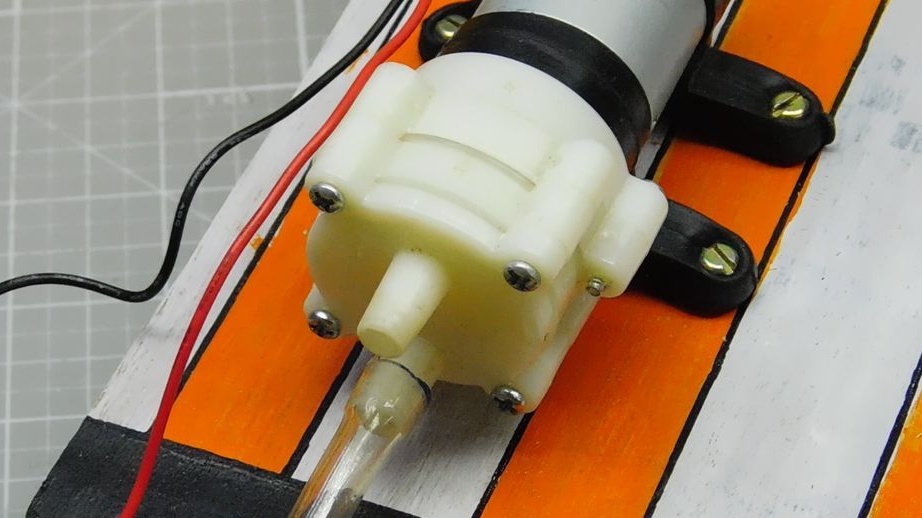
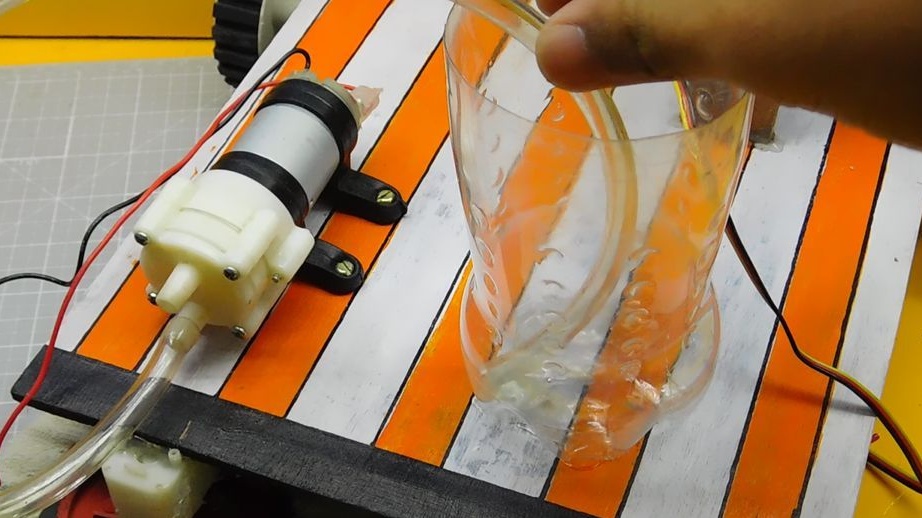
Otrais solis: ūdens apgāde
Nostiprina sūkni uz platformas. Nogriež plastmasas pudeles augšdaļu. Piestiprina pudeli pie platformas. Uzstāda ūdens ieplūdes cauruli. Vēlāk ūdens padeves caurule pie sukām tiks nostiprināta.




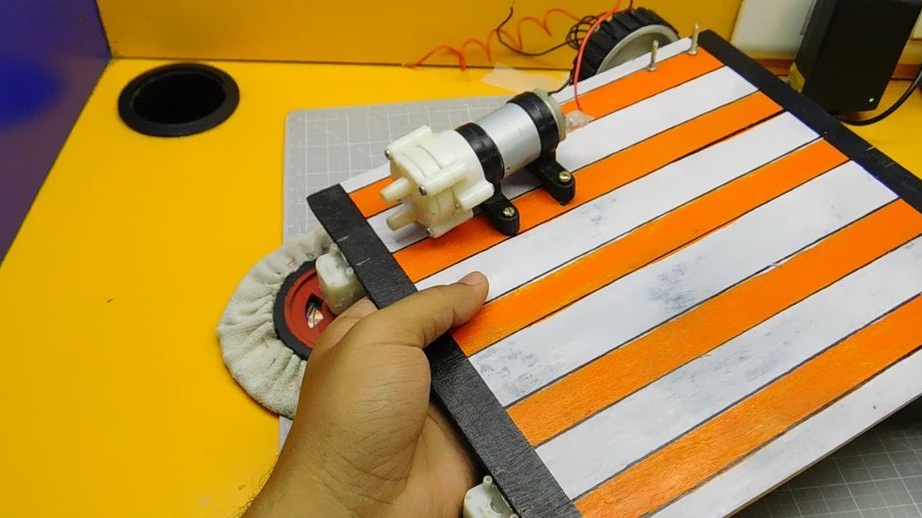




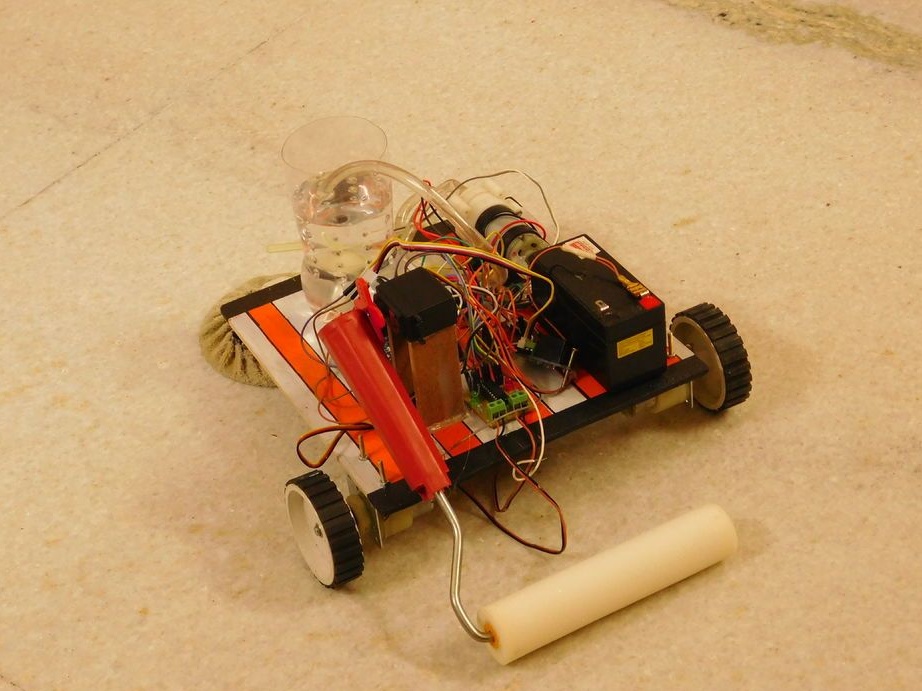
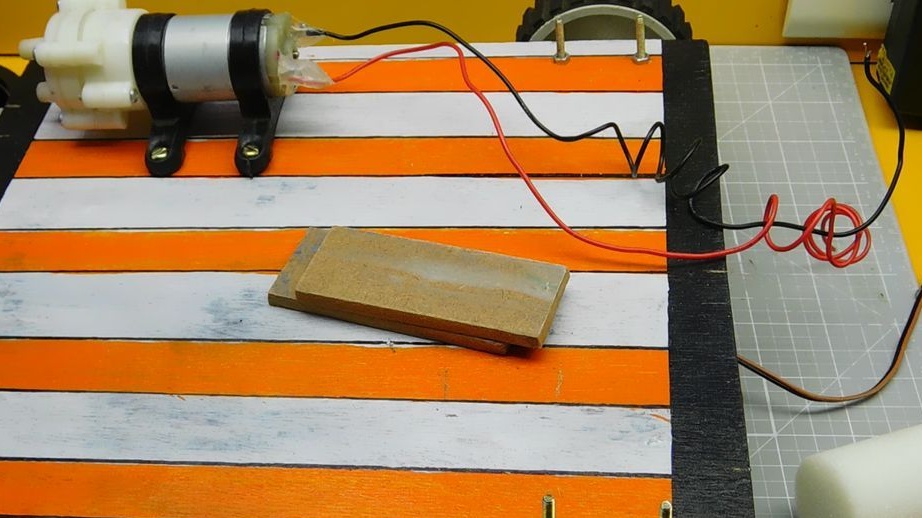
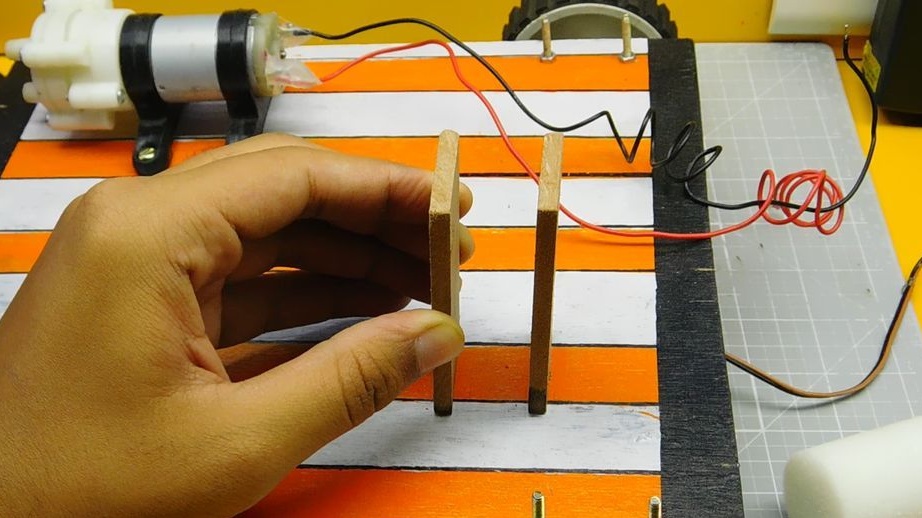
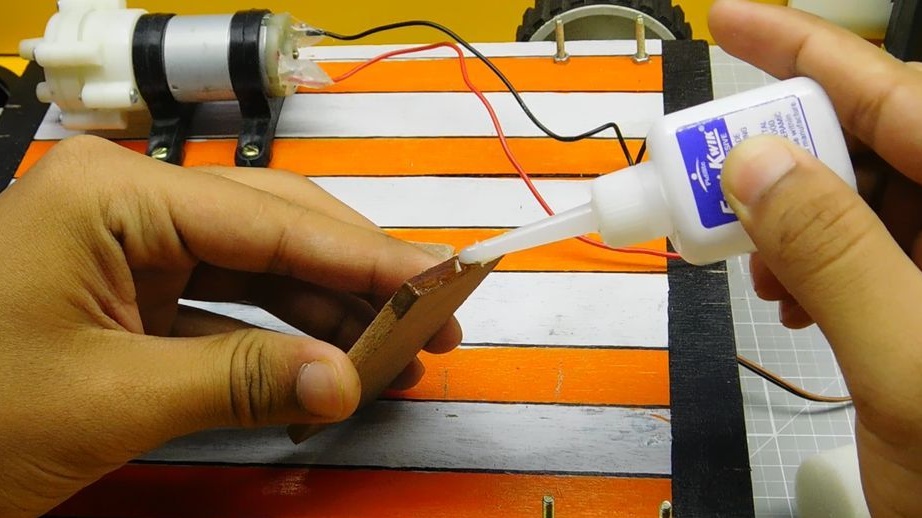
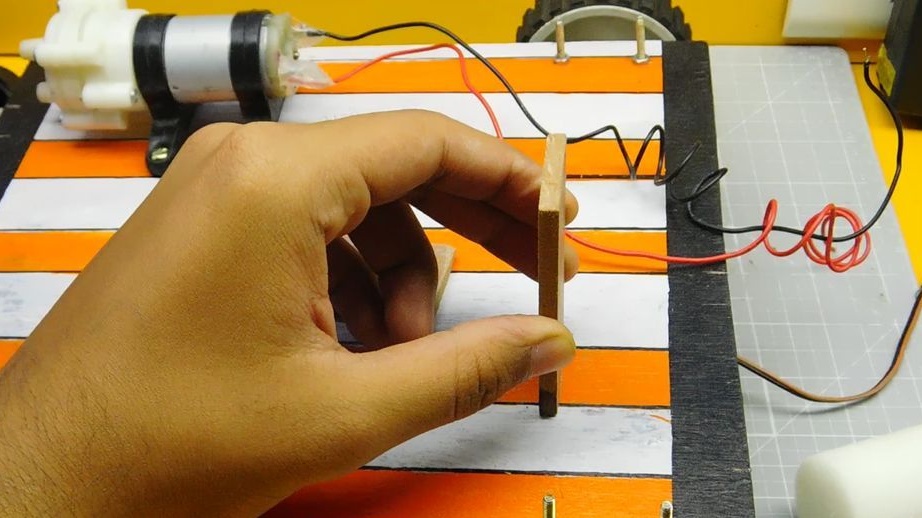
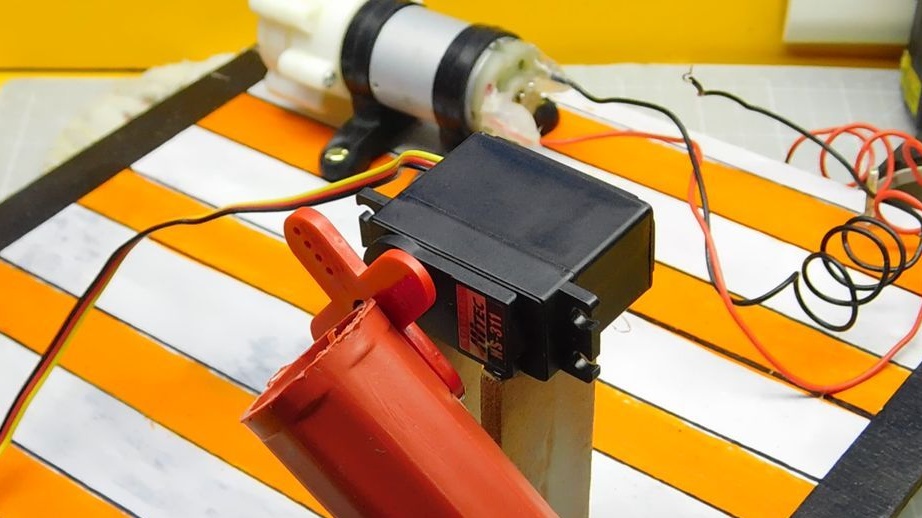
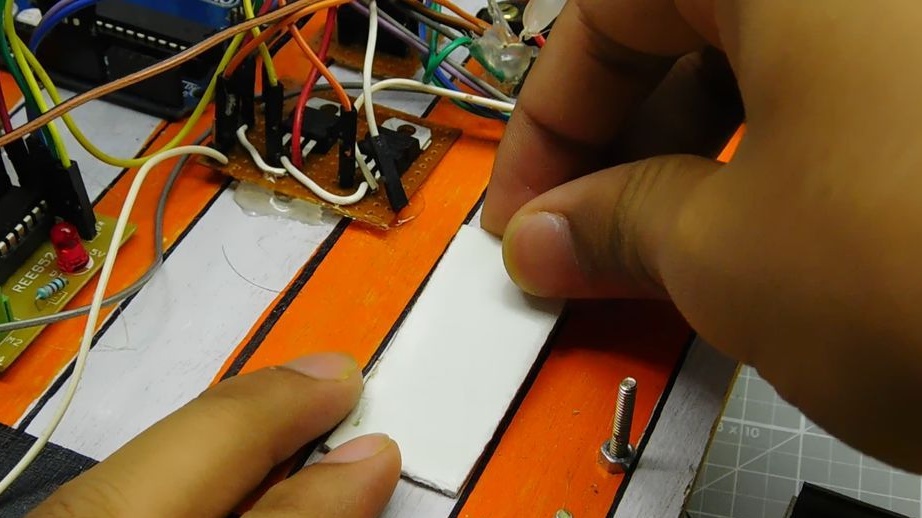
Trešais solis: rullīšu pacelšanas mehānisms
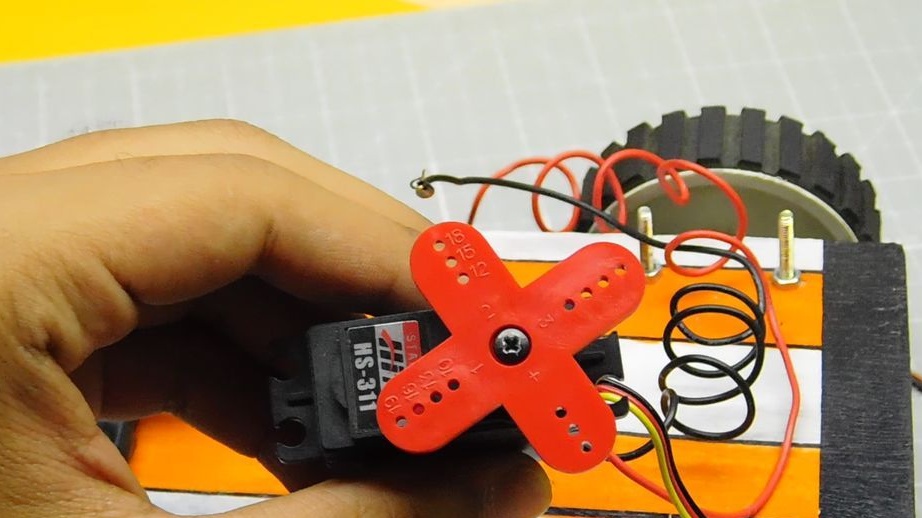
Veltņa uzdevums ir savākt smalkus putekļus. Tā kā veltnis reizēm ir vajadzīgs, meistars nolēma izveidot mehānismu veltņa pacelšanai un nolaišanai. Fiksē divas platformas līstītes paralēli viena otrai. Izveido divus caurumus, vienu servo svirā, otro veltņa rokturī. Pieskrūvējiet veltņa rokturi pie sviras. Nostiprina servo pie līstēm.


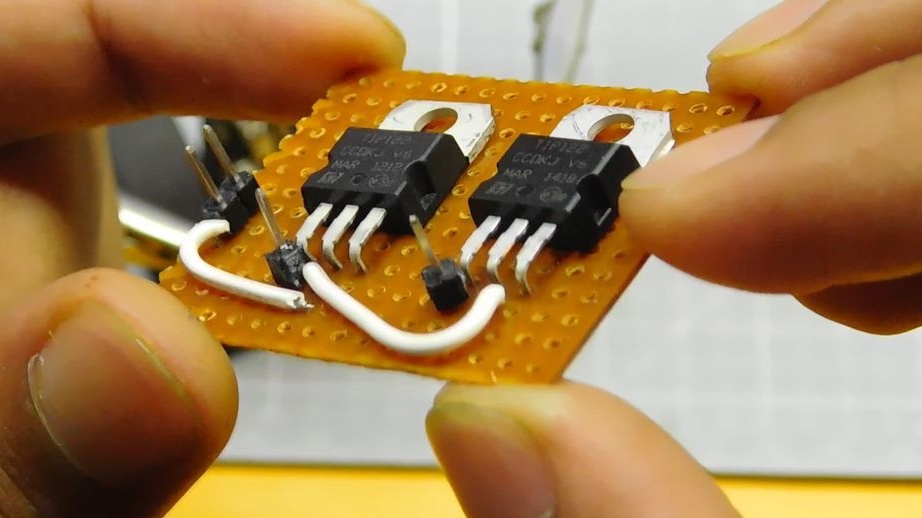
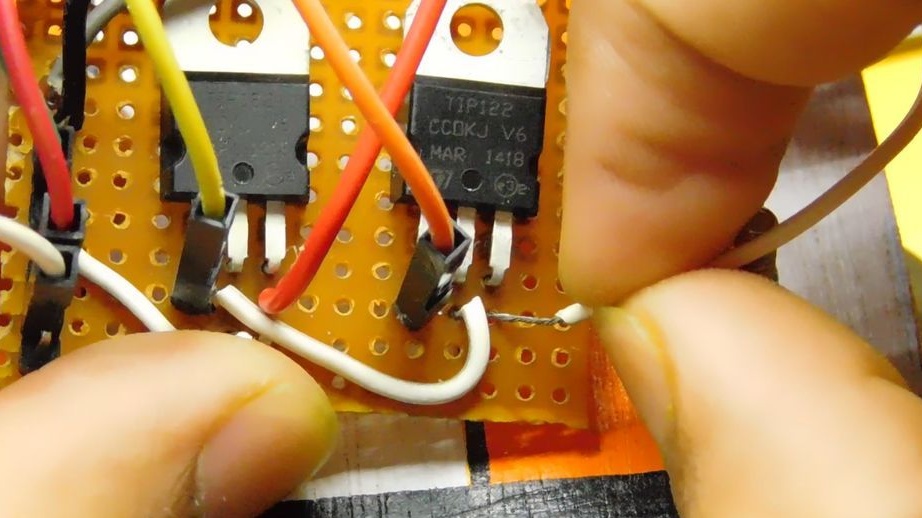
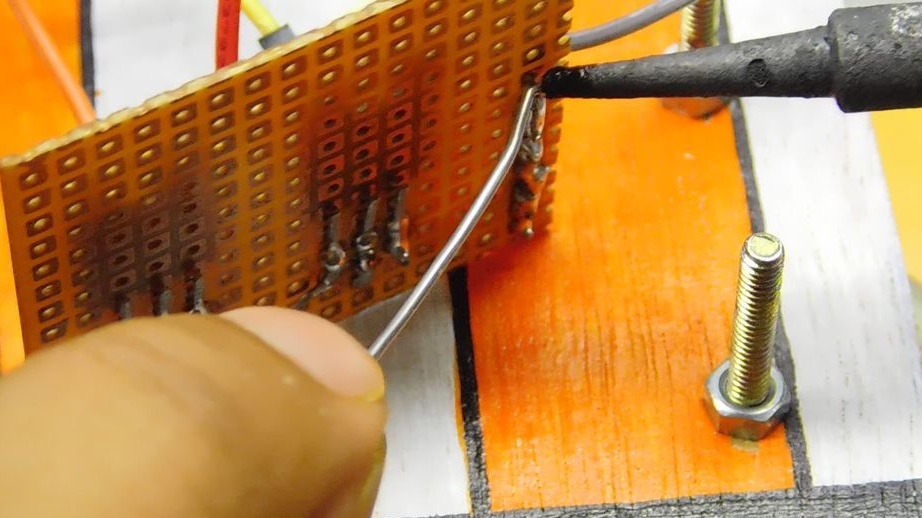
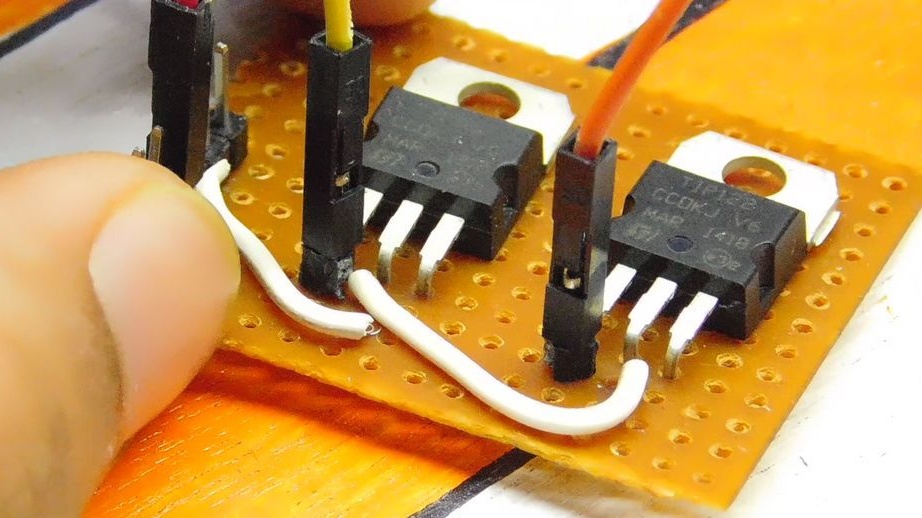
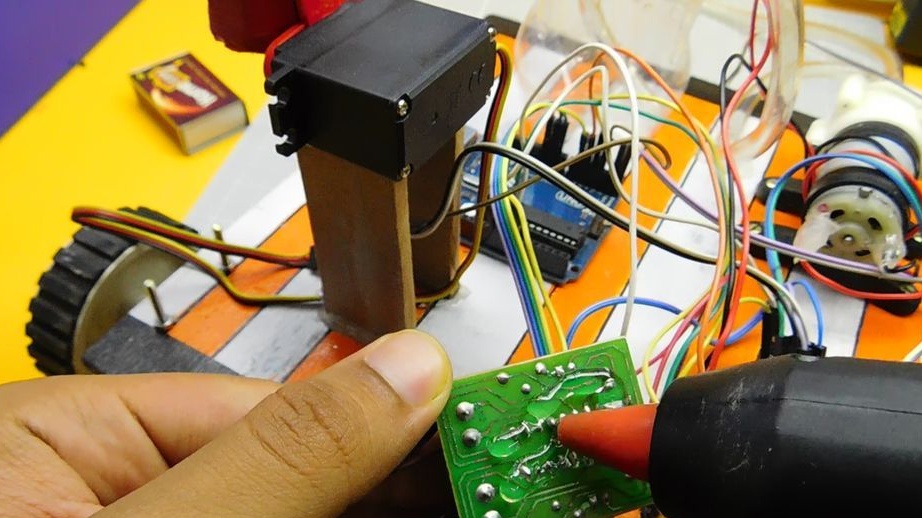
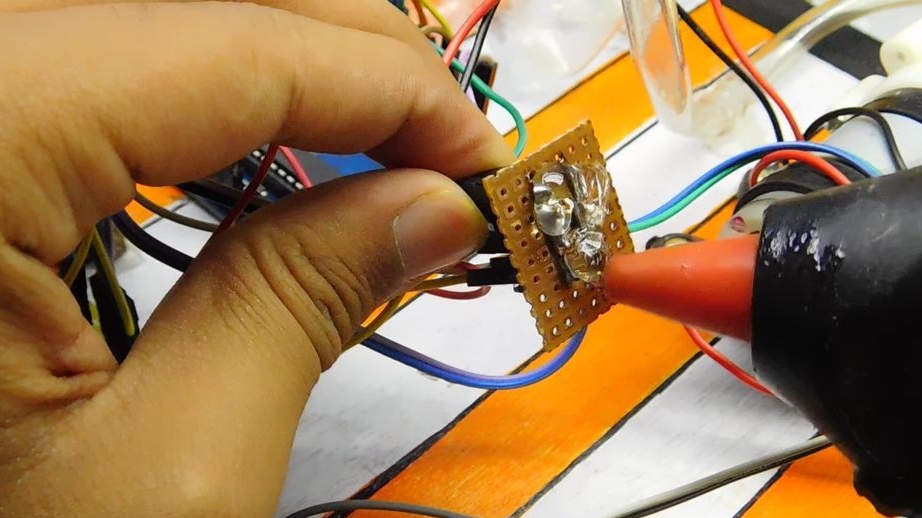
Ceturtais solis: tranzistors
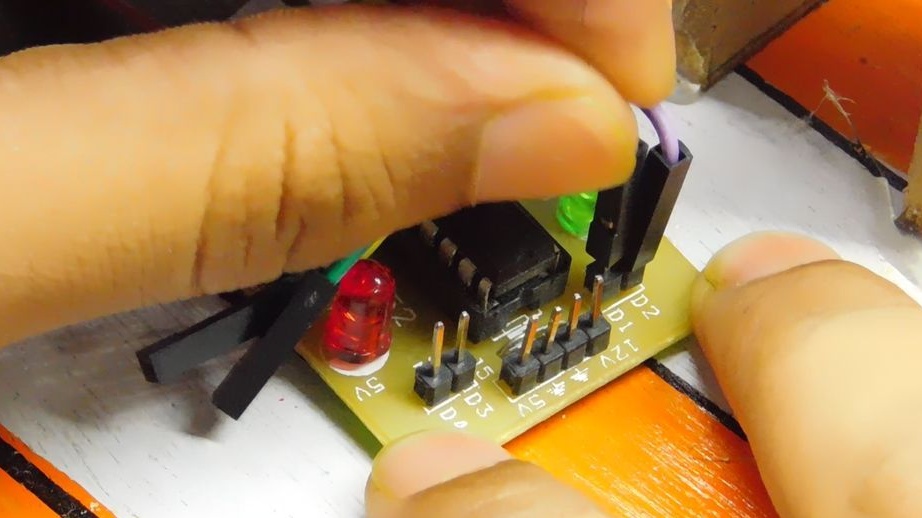
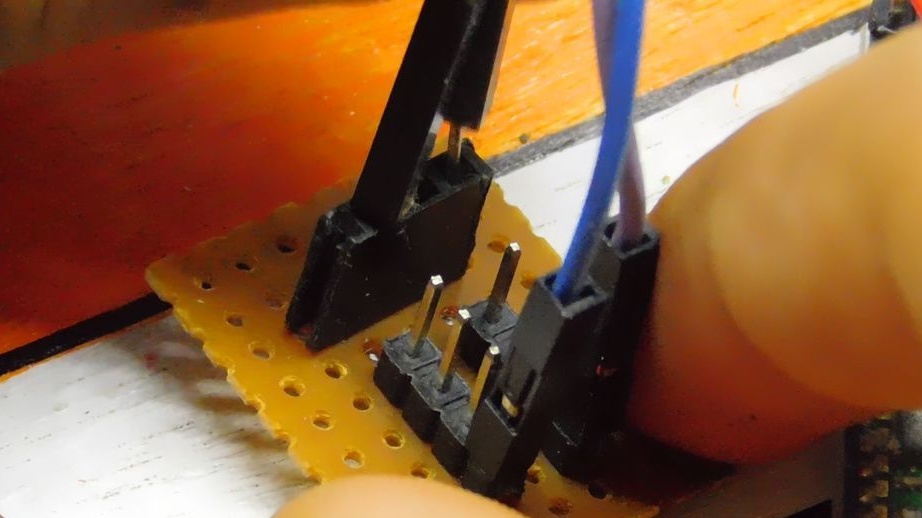
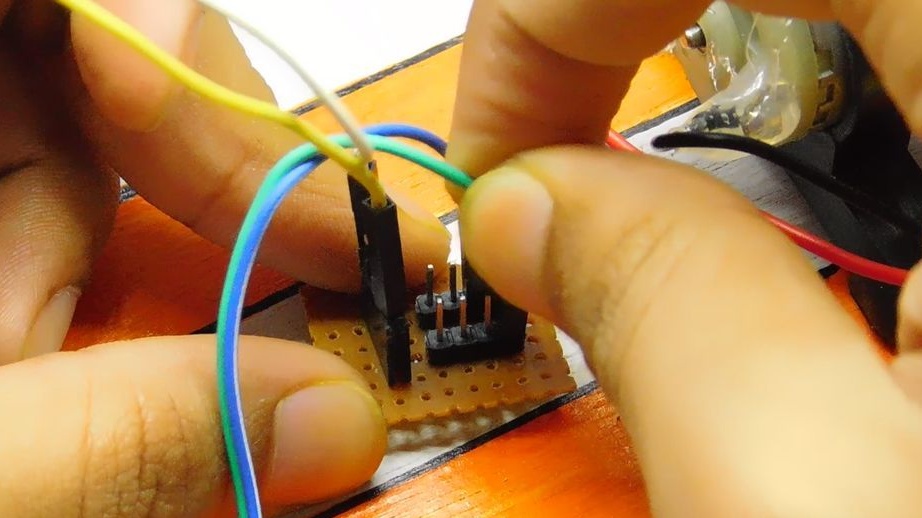
Ūdens sūknim un motoriem ir nepieciešama 12 V jauda, bet, tā kā Arduino izdala tikai 5 V, meistars savāc ķēdi uz tranzistora TIP122.Vednis shēmas platei pievieno arī vairākus + 5 V un Gnd tapas.
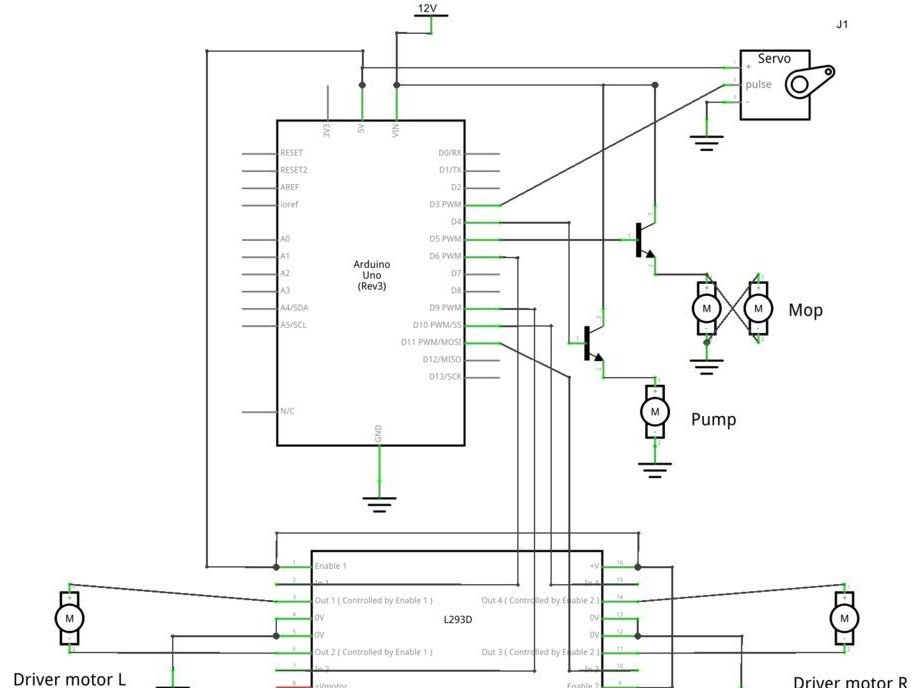
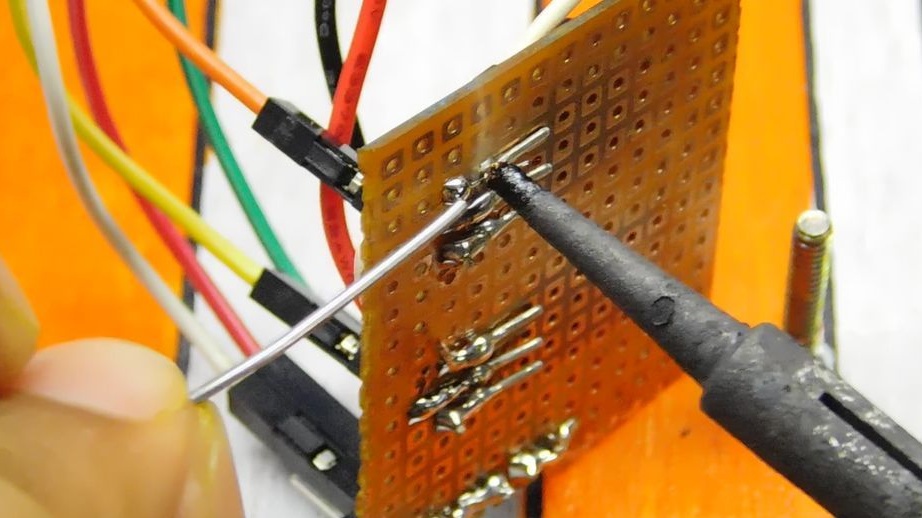
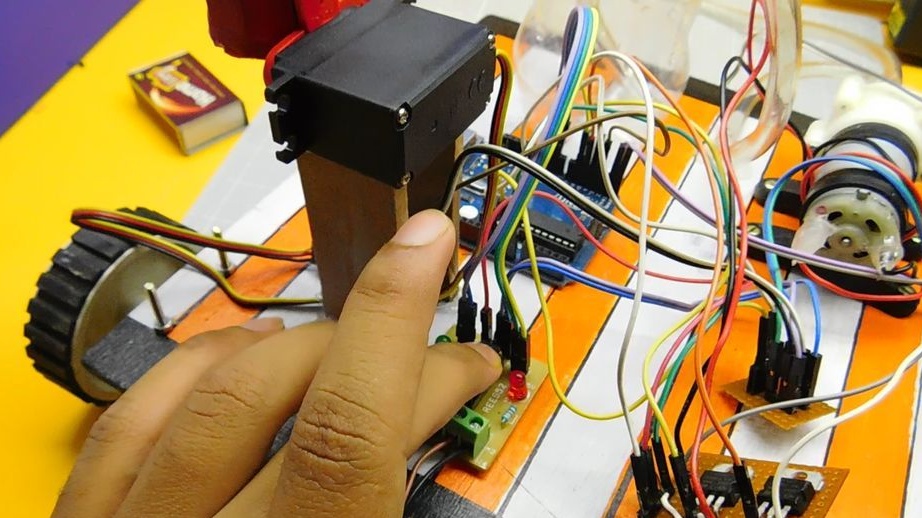
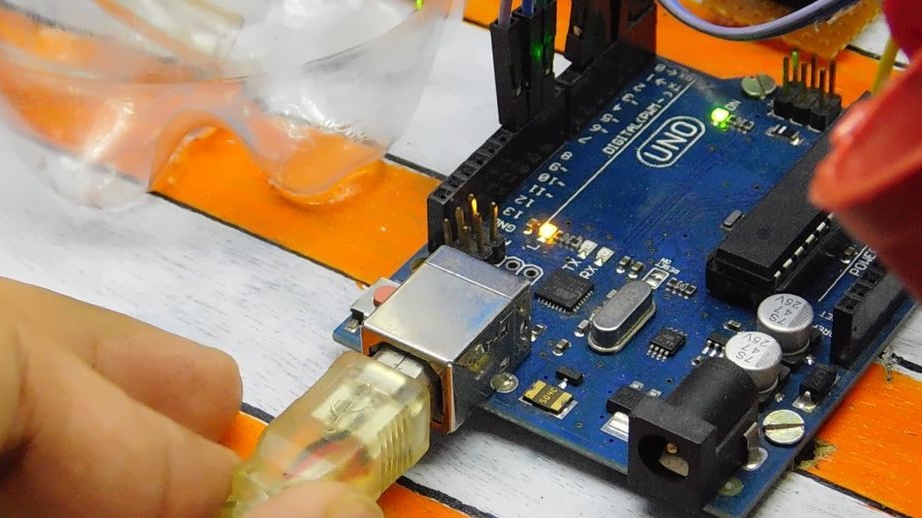
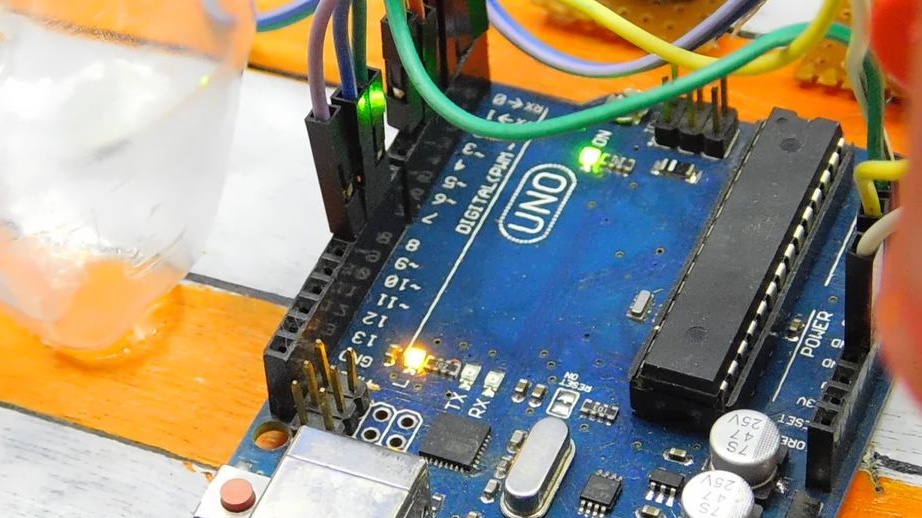
Piektais solis: Arduino ķēdes uzstādīšana
Nostiprina Arduino uz platformas un savieno elektriskās ierīces ar dēli.
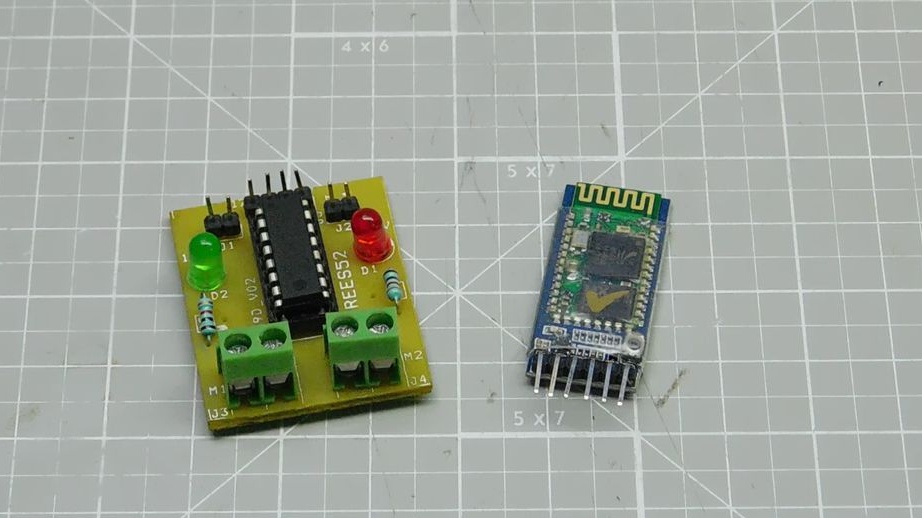
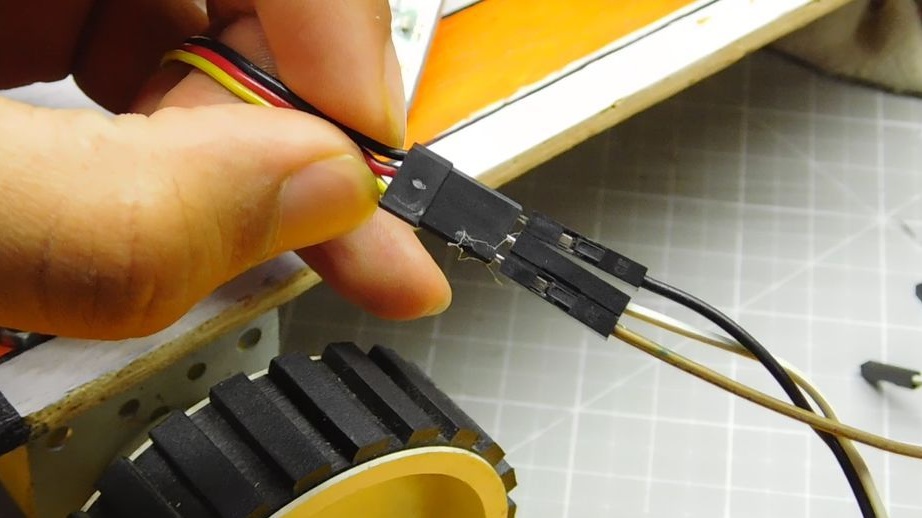
Dzinēja vadības modulis.
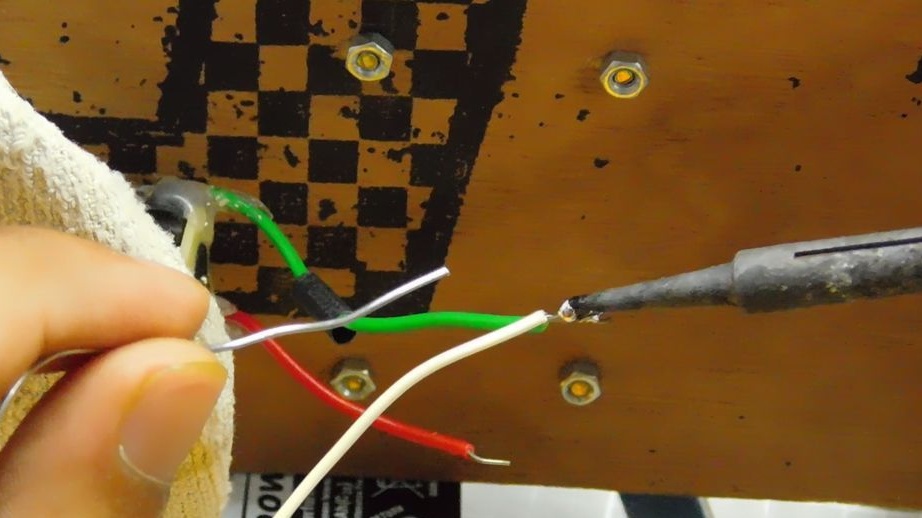
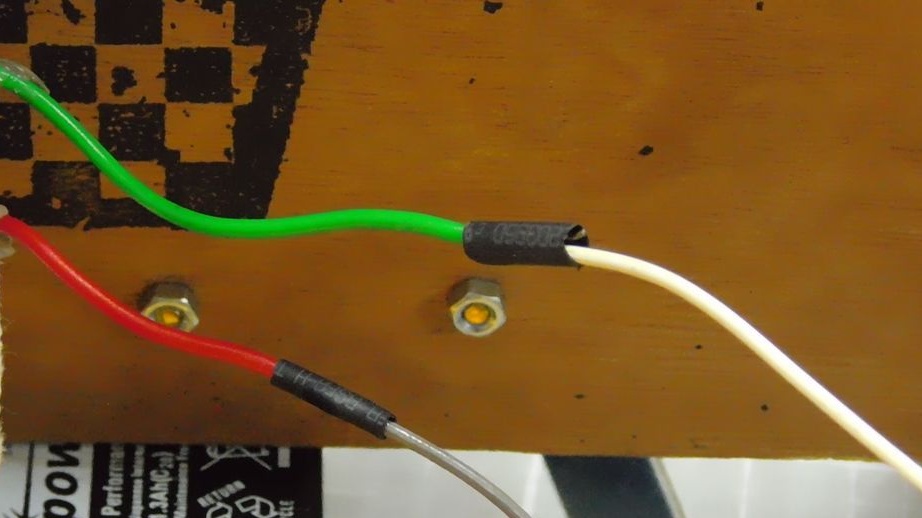
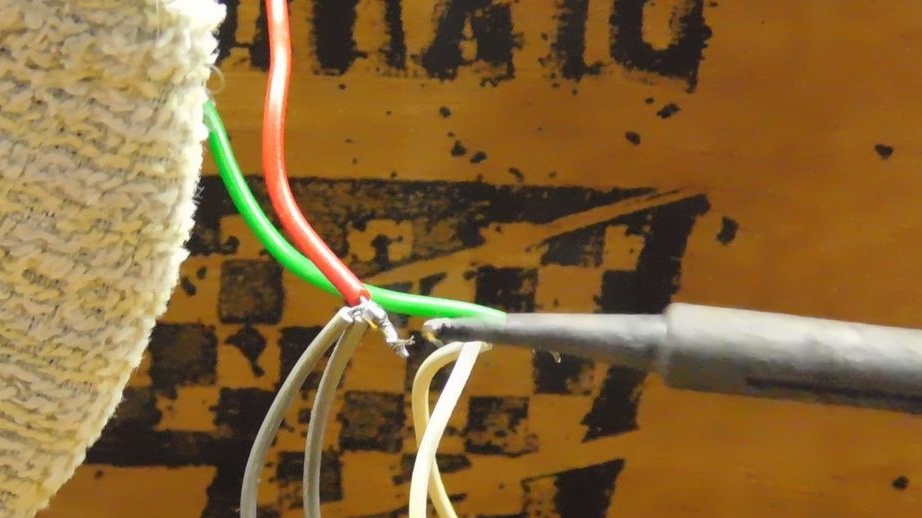
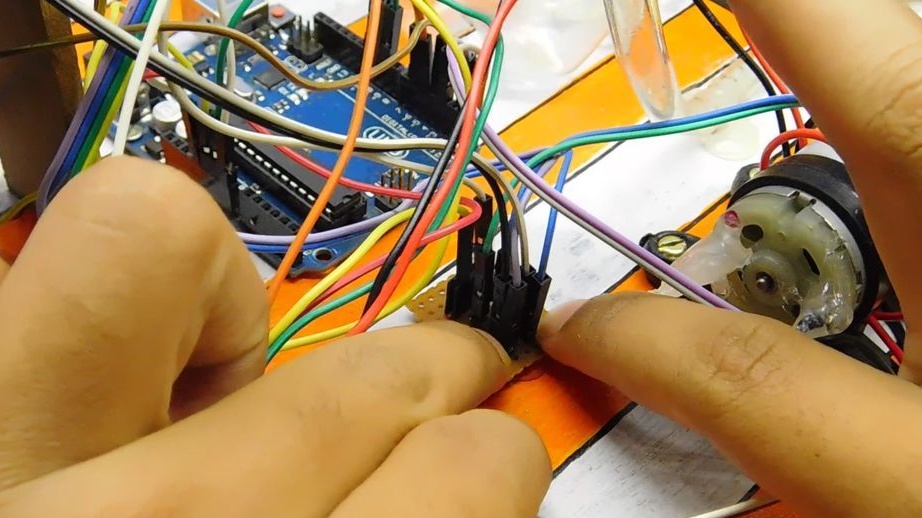
Tas tiek lodēts pie motoru (uz kuriem riteņi ir fiksēti kustībai, nevis sukām) vadiem. Nostiprina vadus moduļa stiprinājuma kontaktligzdās. Pēc tam pievienojiet moduli Arduino šādi.
Modulis ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5 V - + 5 V
Gnd-gnd
+ 12 V modulis tiks pievienots akumulatoram.
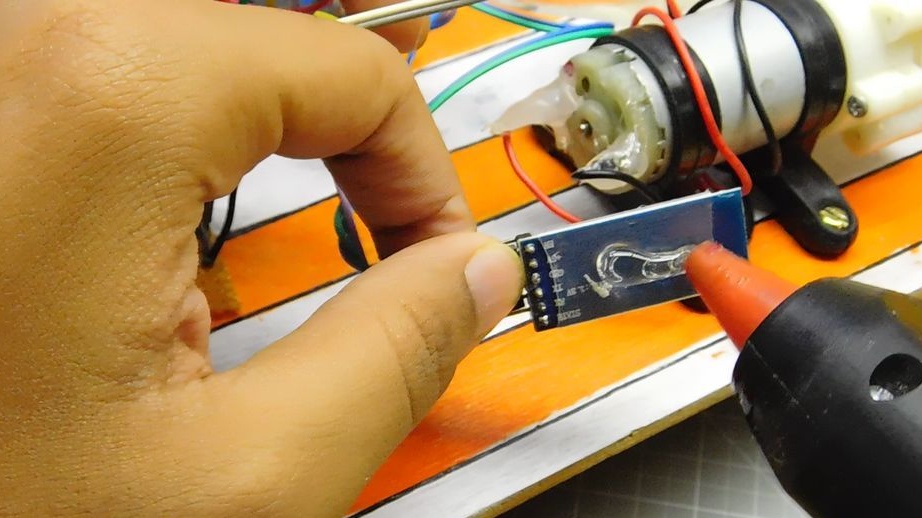
Bluetooth savienojums.
Bluetooth ::: Arduino
Vcc - + 5 V
Gnd - gnd
Rx - Tx
Tx - Rx
Servo motors ::: Arduino
Vcc - + 5 V
Gnd - gnd
Signāls - D3
Tad tas savieno sūkņa un sukas motorus saskaņā ar shēmu. Birstu motori ir savienoti paralēli un griežas dažādos virzienos pa labi pulksteņrādītāja virzienā un pa kreisi pretēji pulksteņrādītāja virzienam.

Sestais solis: robotu detaļu stiprinājumi
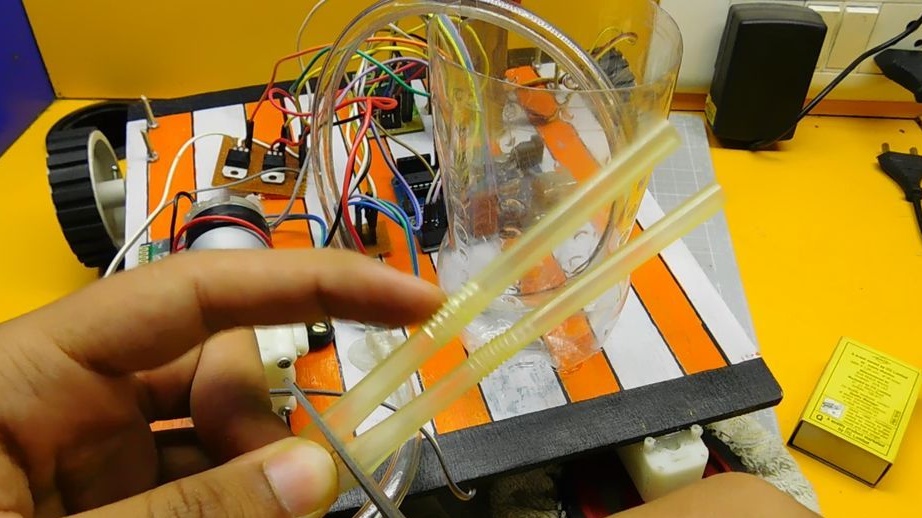
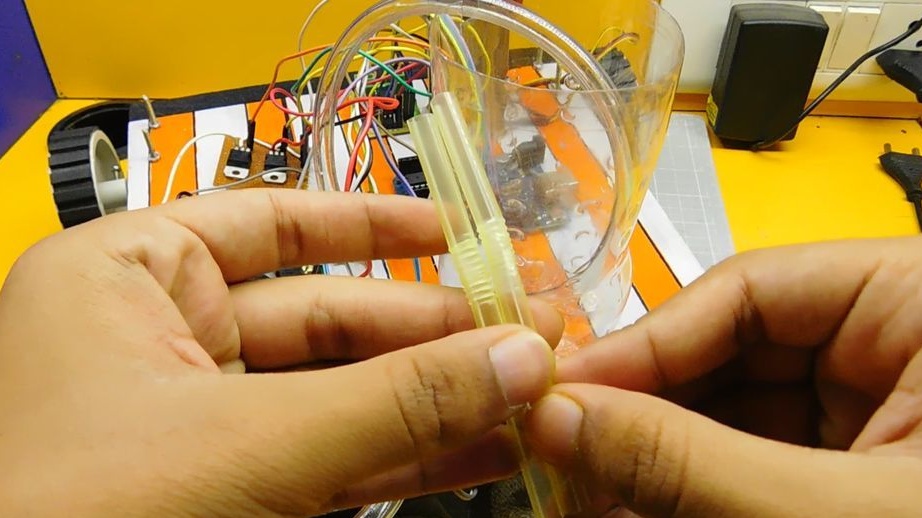
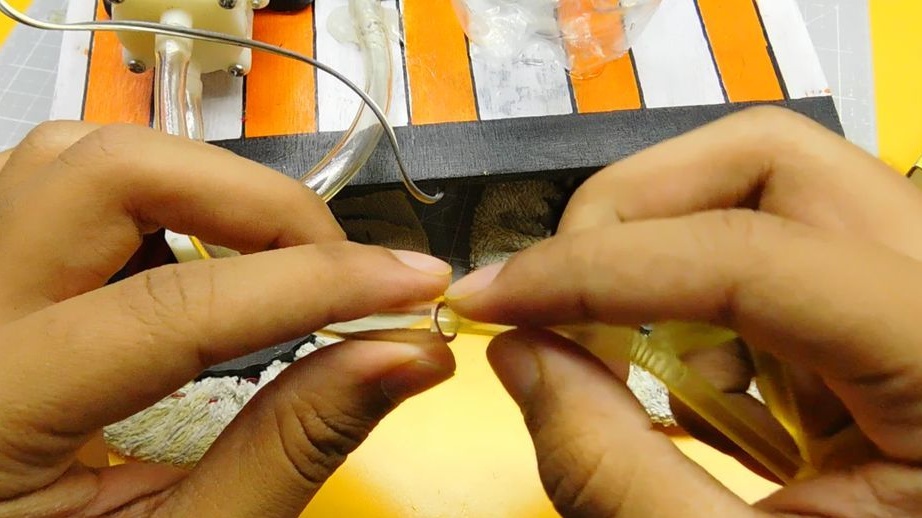
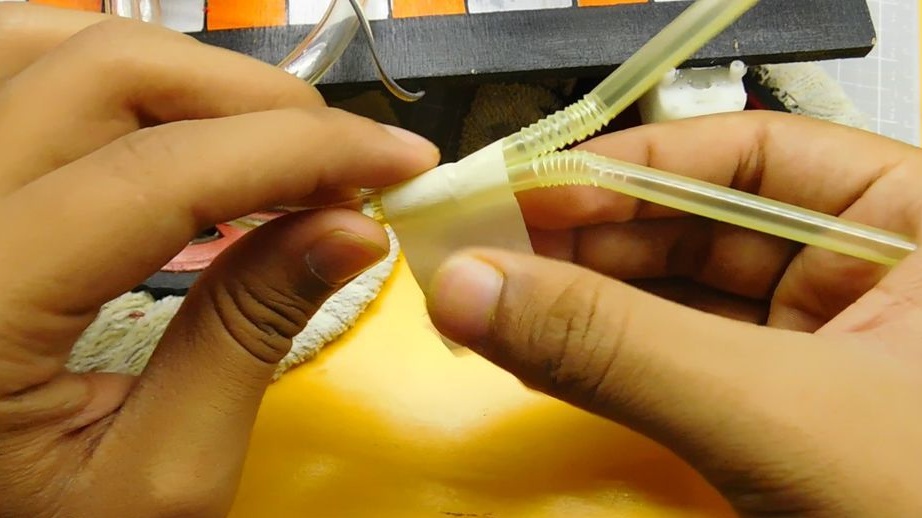
Sagrieziet divus kokteiļa salmiņus, kuru katrs ir aptuveni 7 cm, un ievieto salmiņus ūdens padeves caurulē. Piesprādzē salmiņus suku priekšā.




Slēdzenes uz platformas elektroniska sastāvdaļas.

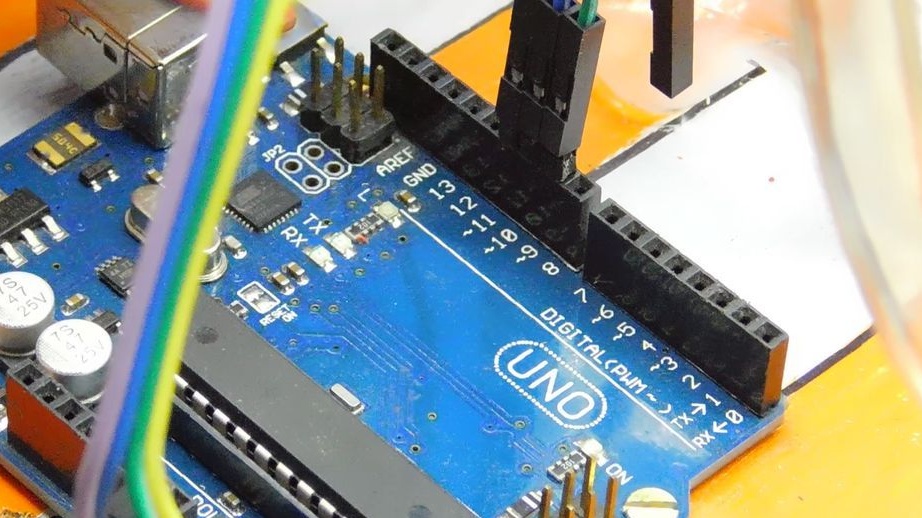
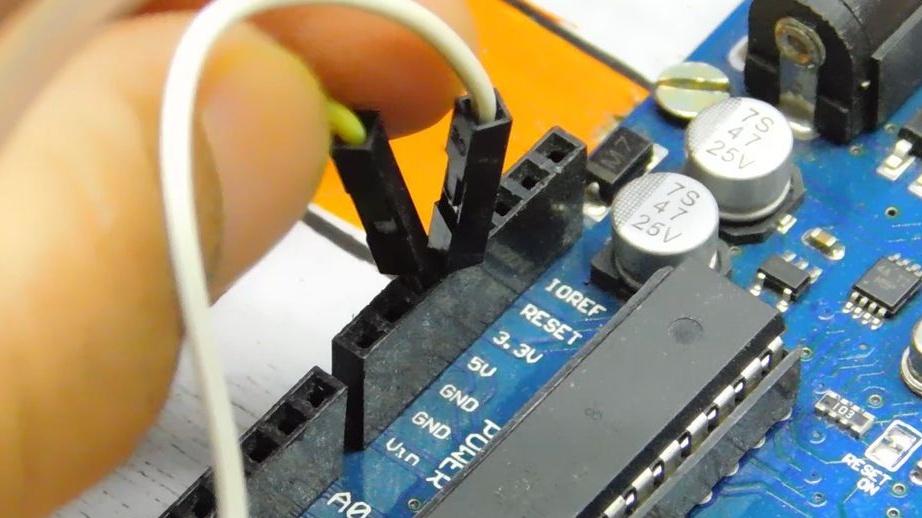
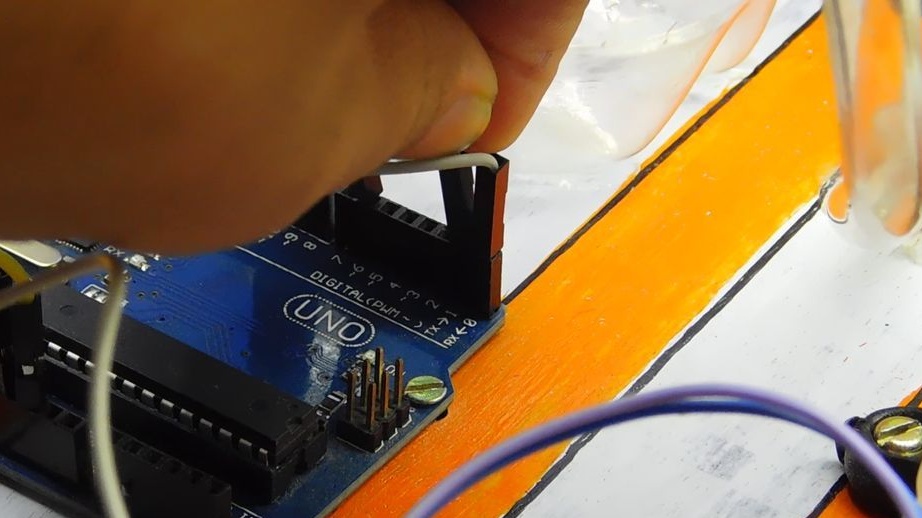
Septītais solis: lejupielādējiet kodu
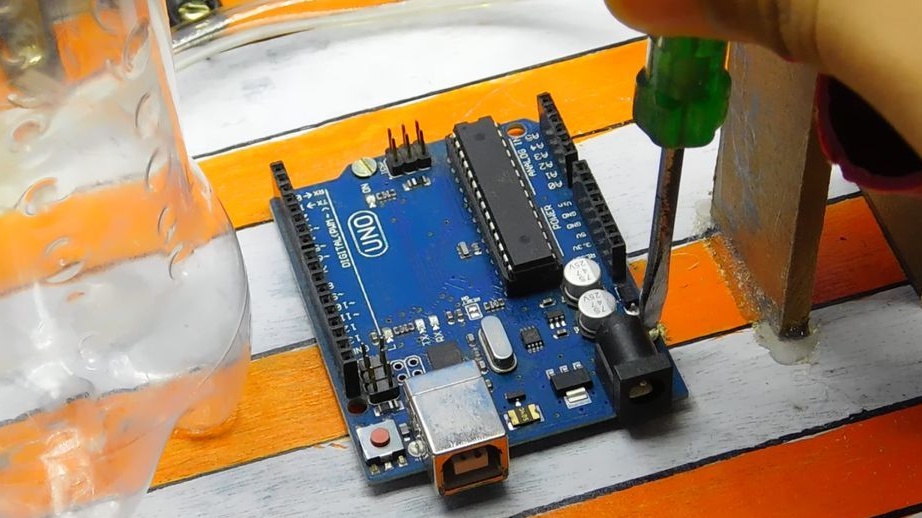
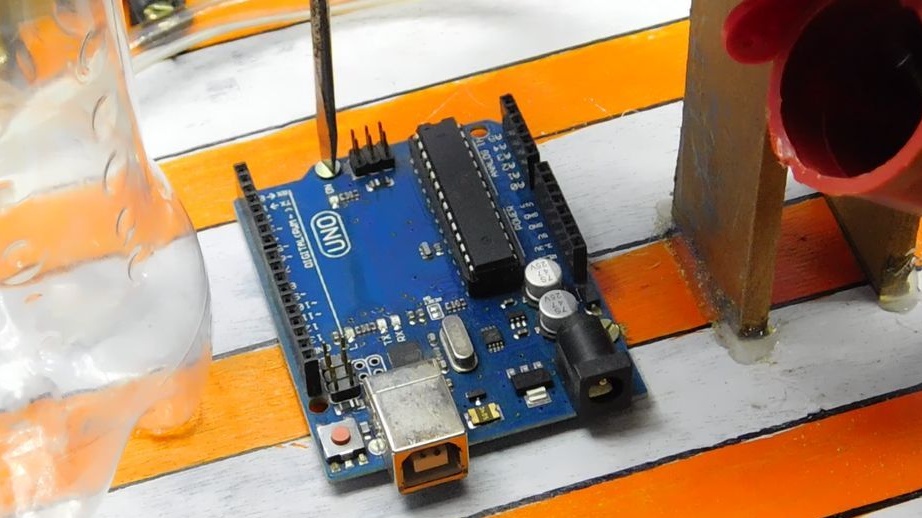
Noņem Arxino dēļa Rx un Tx džemperus. Savieno dēli ar datoru. Ielādē kodu. Iestata džemperus savā vietā. .
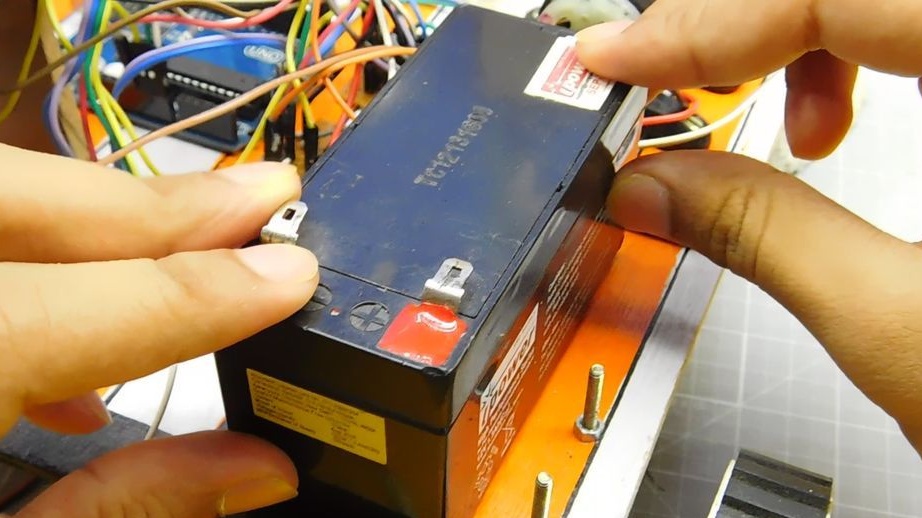
Astotais solis: akumulators
Izmantojot divpusēju lenti, nostiprina uz platformas esošo akumulatoru. Elektrisko ierīču pievienošana akumulatoram. Arduino meistars iesaka pieslēgties caur sprieguma dalītāju. Jūs varat arī pievienot slēdzi shēmai.

Devītais solis: kontrolējiet robotu
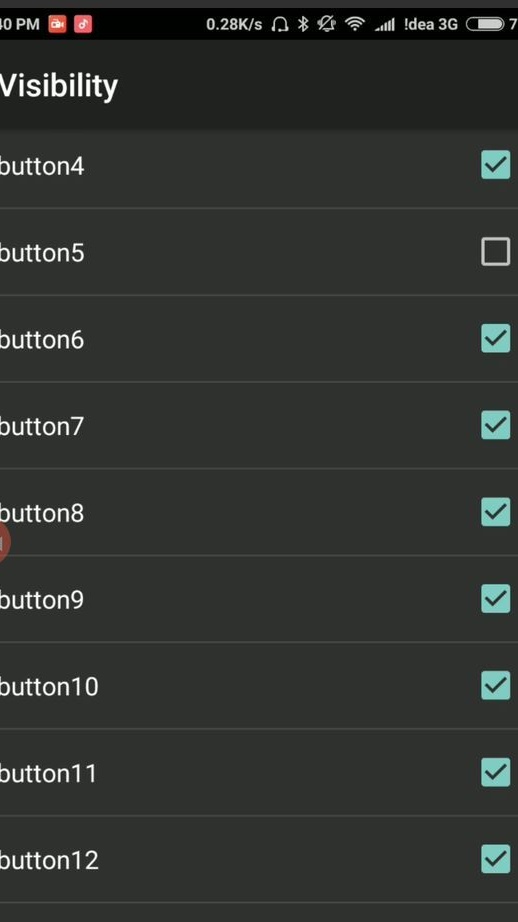
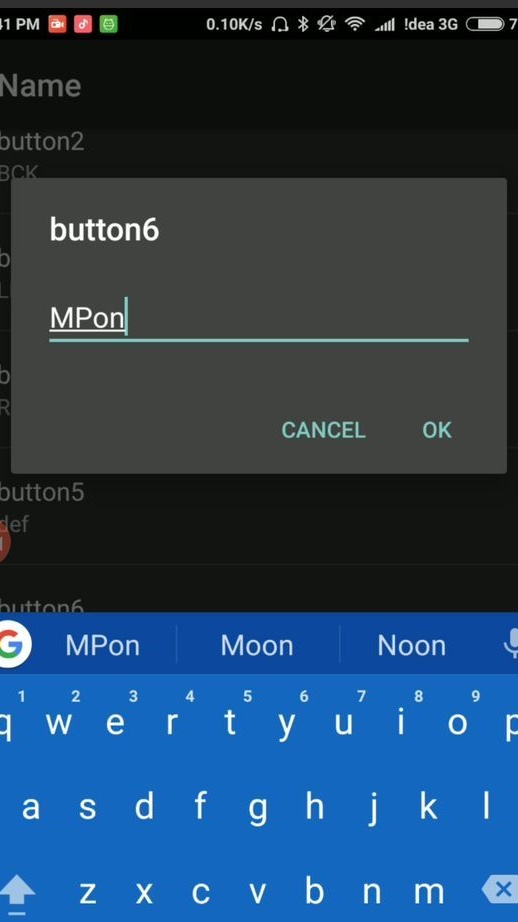
No Google Play vednis lejupielādē lietojumprogrammu “Bluetooth seriālais kontrolieris”. Tiek atvērta lietojumprogramma. Atver iestatījumus> redzamība. Atspējo pogas 5, 9, 12. Pāriet uz nosaukumiem. Katrai pogai piešķir 2-3 burtu pogu. Skatīt fotoattēlu zemāk.
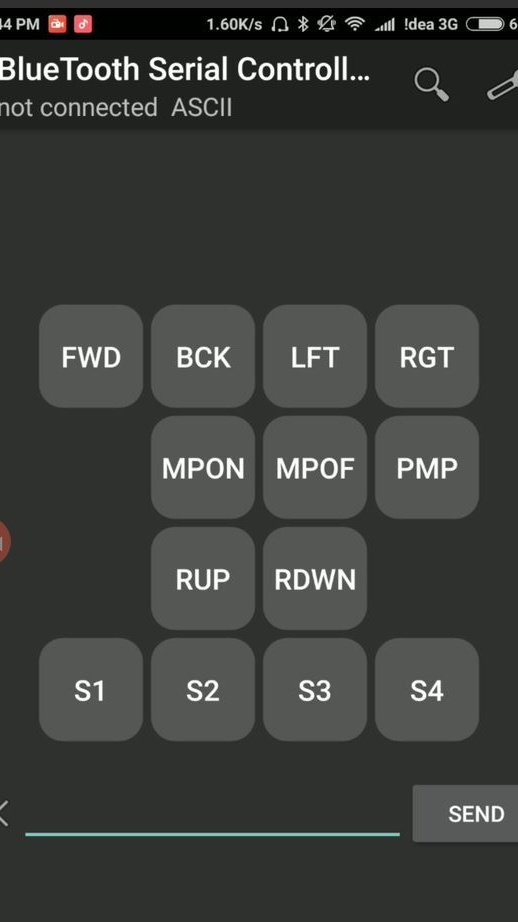
Pēc tam katra poga instalē komandu (pēdiņas ir jānoņem, nemainiet lielo burtu):
1. poga (FWD): “F”
2. poga (BCK): “B”
3. poga (LFT): “L”
4. poga (RGT): “R”
6. poga (MPON): “M”
7. poga (MPOF): “m”
8. poga (PMP): “P”
10. poga (RUP): “U”
11. poga (RDWN): “u”
13. poga (S1): “1”
14. poga (S2): “2”
15. poga (S3): “3”
16. poga (S4): “4”
Apturēšanas komandās> komandas piešķir komandas tikai šīm pogām:
1. poga: “S”
2. poga: “S”
3. poga: “S”
4. poga: “S”
8. poga: “p”

Tagad atliek tikai izveidot savienojumu ar bluetooth moduli ("HC-05"), ievadīt paroli (1234 vai 0000) un jūs varat mēģināt iztīrīt istabu -)))
Paldies meistaram-meistaram, un mēs vēlamies viņam uzlabot robotu un iegūt no tā pilnīgi autonomu darbu.
Viss robotu tīrītāja montāžas process ir redzams video.