


Droši vien viens no pamatprojektiem arduino Es esmu parkošanās sensori. Bet šajā rakstā netiks aprakstīts parasto parkošanās sensoru radīšana, bet gan stāvvietu sensori ar manuālu kritiskā attāluma regulēšanu. Šīs ierīces izveidošanas laikā jūs palielināsit savas prasmes shēmās un programmēšanā.
Galvenās sastāvdaļas:
• arduino Nano / Uno dēlis
• ultraskaņas attāluma sensors HC-CR04
• 6 gaismas diodes
• 6 rezistori pie 220 omi
• 2 rezistori uz 10 KOm
• 2 pulksteņa pogas
• pjezo squeaker
• kaislīgs dēlis
• tētis tētis vadi
• kurpju sūklis (lietai)
No rīkiem:
• lodāmurs
• termo līme
Apsveriet ierīces algoritmu
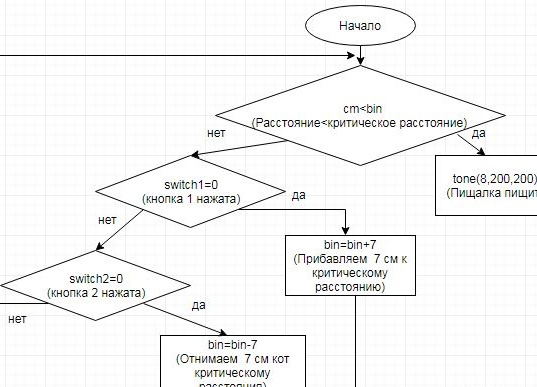
Pēc algoritma apskates mēs apkopojam shēmu uz delīriskā dēļa:
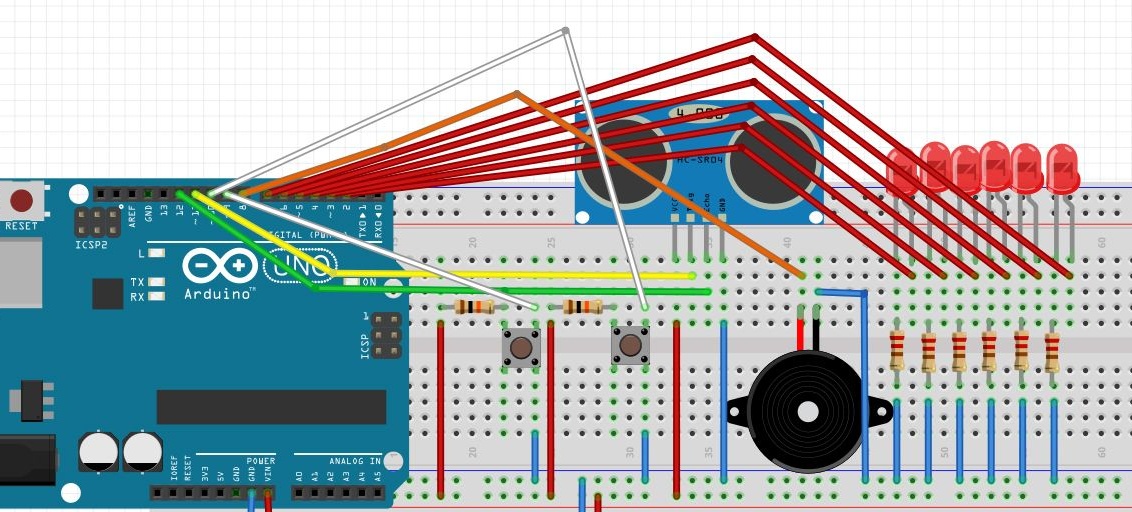
Tā kā es montēju ķēdi korpusā, tika nolemts izgatavot pogu vai LED gaismas vairogus.
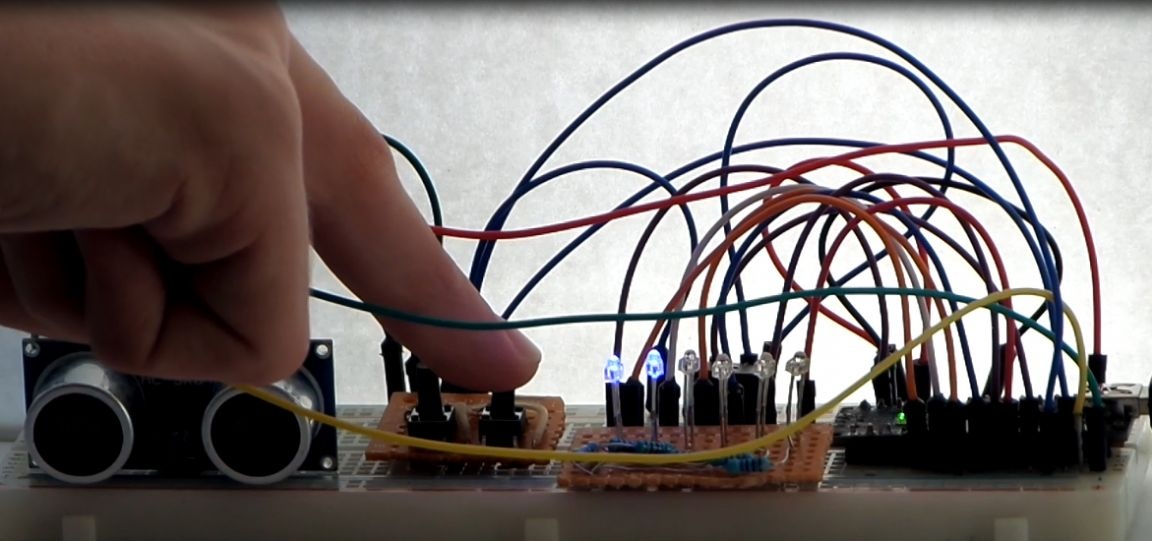
Ierīces korpuss tika izgatavots no kastes no kurpes ar sūkli.
Izskatās, ka ierīce atrodas iekšpusē.

Redzēsim kodu.
int slēdzis1 = 9; // 1. poga
int slēdzis2 = 10; // 2. poga
int pin = 2;
int bin = 40; // Sākotnējais kritiskais attālums centimetros !!!
int echoPin = 12; // Echo pin uz HC-SR04 moduļa
int trigPin = 11; // Iespraušanas tapa uz HC-SR04 moduļa
int buz = 8; // Pin tweeter
Būla lBut1 = LOW;
Būla lBut2 = LOW;
Būla cBut1 = LOW;
Būla cBut2 = LOW;
Nederīga iestatīšana () {
Sērijas.begin (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (switch1, INPUT);
pinMode (switch2, INPUT);
pinMode (2, OUTPUT); // 1. gaismas diode
pinMode (3, OUTPUT); // 2. gaismas diode
pinMode (4, OUTPUT); // 3. gaismas diode
pinMode (5, OUTPUT); // 4. gaismas diode
pinMode (6, OUTPUT); // 5. gaismas diode
pinMode (7, OUTPUT); // 6. gaismas diode
pinMode (8, OUTPUT); // Saspiest
}
Būla debounce (Būla pēdējā)
{
Būla strāva = digitalRead (switch1);
if (pēdējais! = pašreizējais)
{
kavēšanās (5);
strāva = digitalRead (switch1);
}
atgriešanās strāva;
}
Būla debounce2 (Būla pēdējais2)
{
Būla strāva2 = digitalRead (switch2);
if (pēdējais2! = pašreizējais2)
{
kavēšanās (5);
current2 = digitalRead (switch2);
}
atgriezes strāva2;
}
tukšs cilpa () {
int ilgums, cm;
digitalWrite (trigPin, LOW);
kavēšanāsMikrosekundēs (2);
digitalWrite (trigPin, HIGH);
kavēšanāsMikrosekundēs (10);
digitalWrite (trigPin, LOW);
ilgums = pulseIn (echoPin, HIGH);
cm = ilgums / 58;
Sērijas.druka (cm);
Serial.println ("cm");
kavēšanās (10);
cBut1 = norakstīt (lBut1);
ja (lBut1 == LOW && cBut1 == HIGH)
{
pin = pin-1;
bin = bin-7; // Cipars 7 nozīmē atņemšanu par 7 cm no kritiskā attāluma !!!
}
lBut1 = cBut1;
digitalWrite (pin, HIGH);
cBut2 = debounce2 (lBut2);
ja (lBut2 == LOW && cBut2 == HIGH)
{
pin = pin + 1;
bin = bin + 7; // Cipars 7 nozīmē 7 cm palielinājumu no kritiskā attāluma !!!
}
lBut2 = cBut2;
digitalWrite (pin, LOW);
ja (cm 0)
{
tonis (8 200 200);
kavēšanās (300);
}
cits
{
noTone (8);
}
} Atkritumu konteinera vērtības var mainīt uz jums ērtāku.
Tā rezultātā ierīce regulāri pilda savas funkcijas.

Šis raksts palīdzēs izgatavot tos pašus parkošanās sensorus bez lielām pūlēm.
Es vēlu visiem veiksmi šīs ierīces atkārtošanā. Es ceru, ka mans ceļvedis jums bija noderīgs.