

Labdien Arduino cienītājiem! Internetā es redzēju diezgan interesantu un iespaidīgu robotu (vai ierīci, sauciet to kā vēlaties), kas “spēlē” Stak spēli, izmantojot tos pašus darbības principus, jūs varat izveidot robotu, kas var spēlēt tādas spēles kā ģeometrijas domuzīme, klavieres un citas, kur jums vienkārši nepieciešams Kule ekrānā ar noteiktu secību. Ko es izdarīju, lūdzu, novērtējiet zemāk esošajā aptaujā.
Ja kāds interesē, šeit ir video par šī robota darbu:
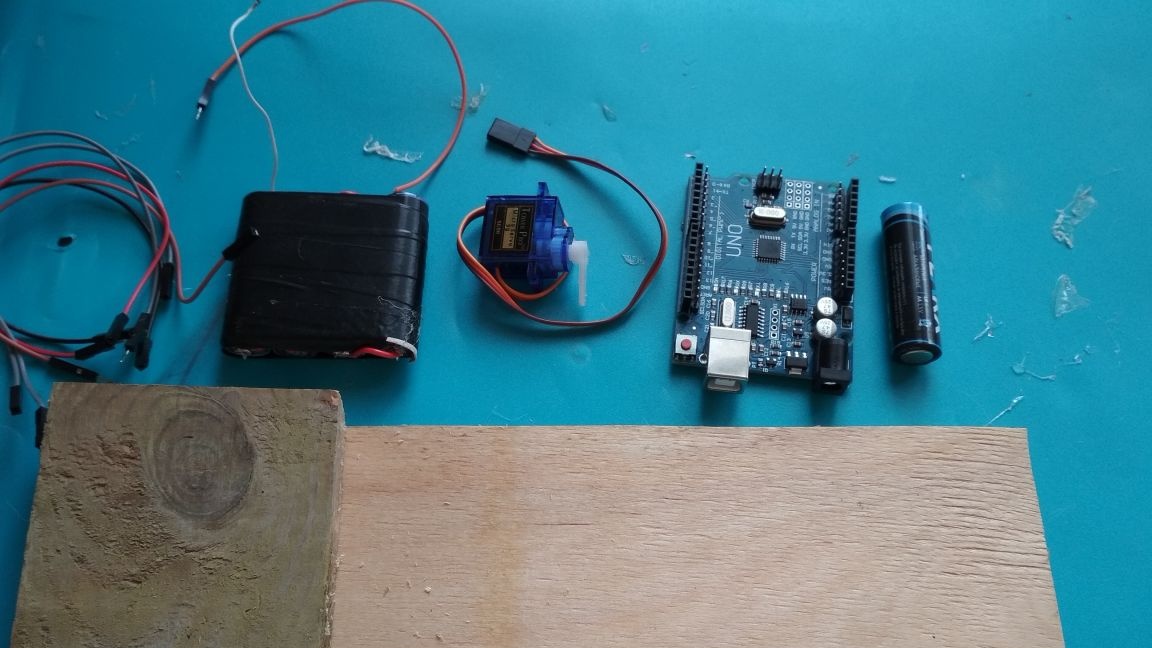
Un tāpēc šim "robotam" mums ir nepieciešams:
samaksa Arduino Uno
- savienojošie vadi, piemēram, "tēvs-māte" vai "tēvs-tēvs"
-pakalpojums
- saplākšņa gabals
- apmēram 1 cm bieza dēļa gabals, galvenais, lai divreiz būtu biezāks nekā saplāksnis
saldējuma nūja
irbuli
Folija (ja nav irbuli)
- akumulators (ja nav irbuli)
- strāvas padeve 6–12 voltiem (es izmantoju 4 pirkstu baterijas, kas savienotas virknē)
No nepieciešamajiem rīkiem:
šķēres
termiskā līme
Un tāpēc pirmais, kas jādara, ir no saplākšņa gabala sagriezt divreiz lielāku gabalu nekā tālrunis, jūs varat to lielāku, un no tāfeles jums ir jāsagriež gabals, kas ir jūsu tālruņa izmērs (es izgatavoju nedaudz dažādus izmērus, bet tas vispār nav kritiski). Tad mēs līmējam savas sagataves, kā parādīts fotoattēlā:

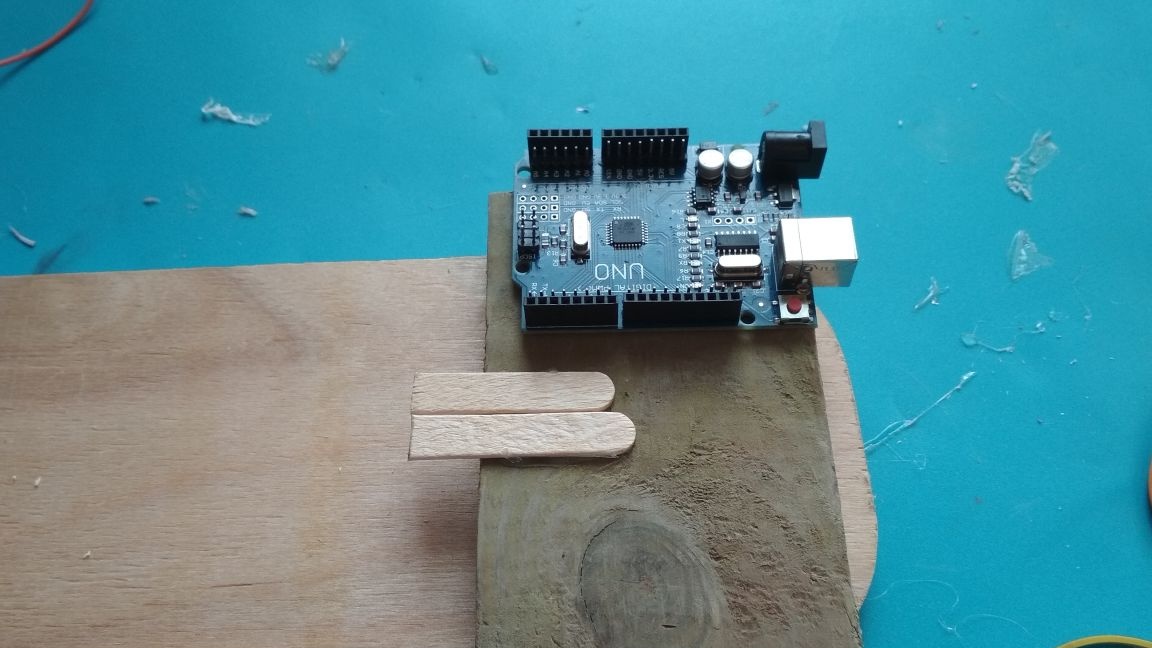
Paņemiet saldējuma nūju un sagrieziet to apmēram uz pusēm:

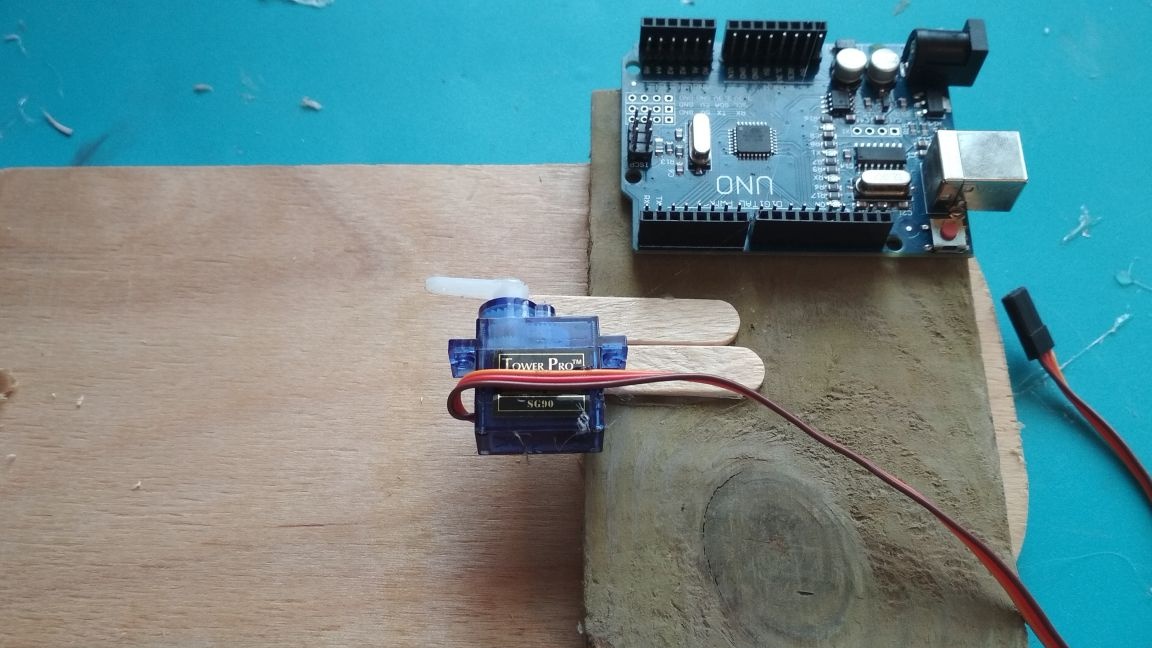
Līmējiet tos dēļa centrā no saplākšņa puses, kā parādīts fotoattēlā:

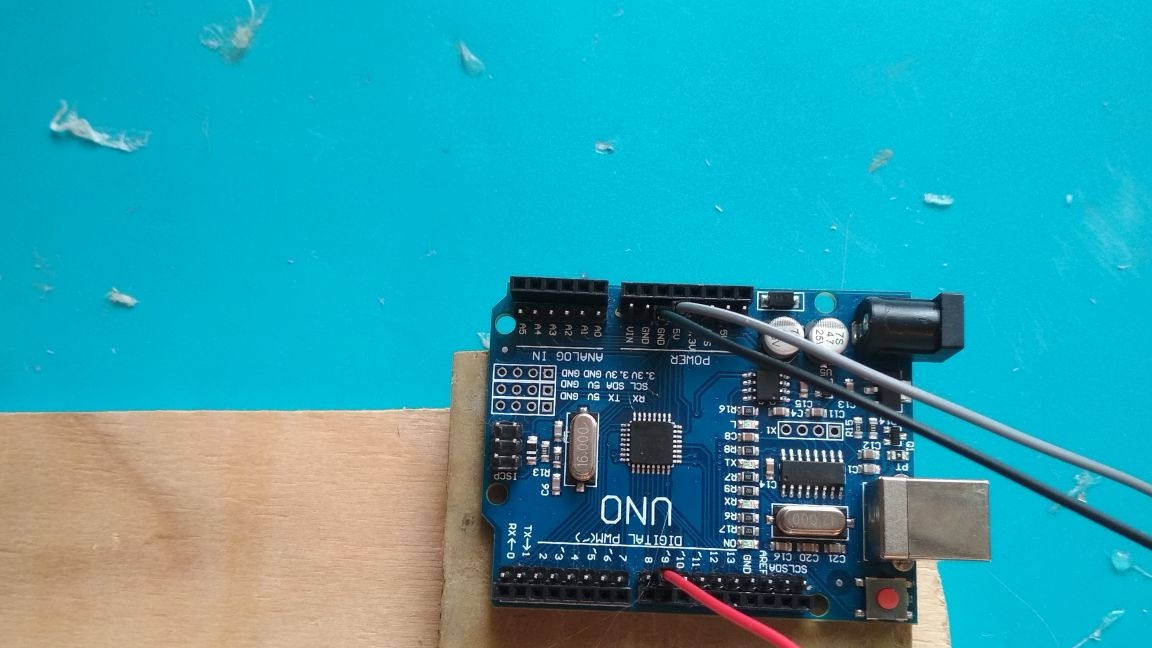
Mēs līmējam Ardino Uno dēli no tāfeles malas:
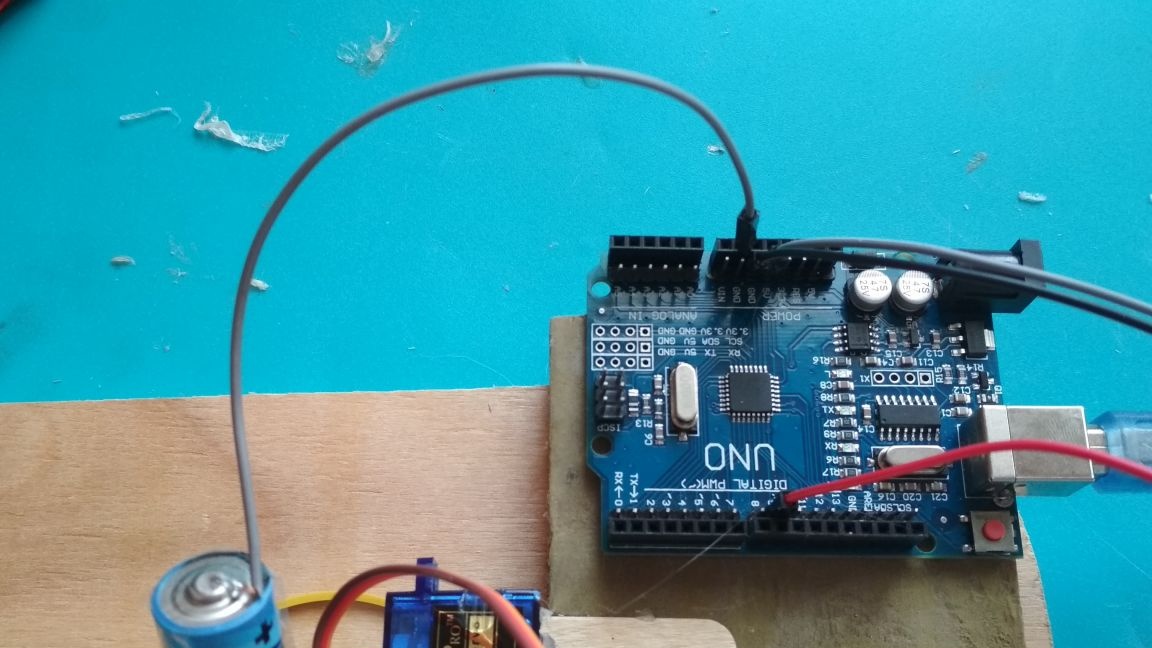
Mēs ņemam servomotoru un līmējam vadus tā, lai tie netraucētu:
Līmējiet servodotoru līdz saldējuma kociņu pusīšu galam:
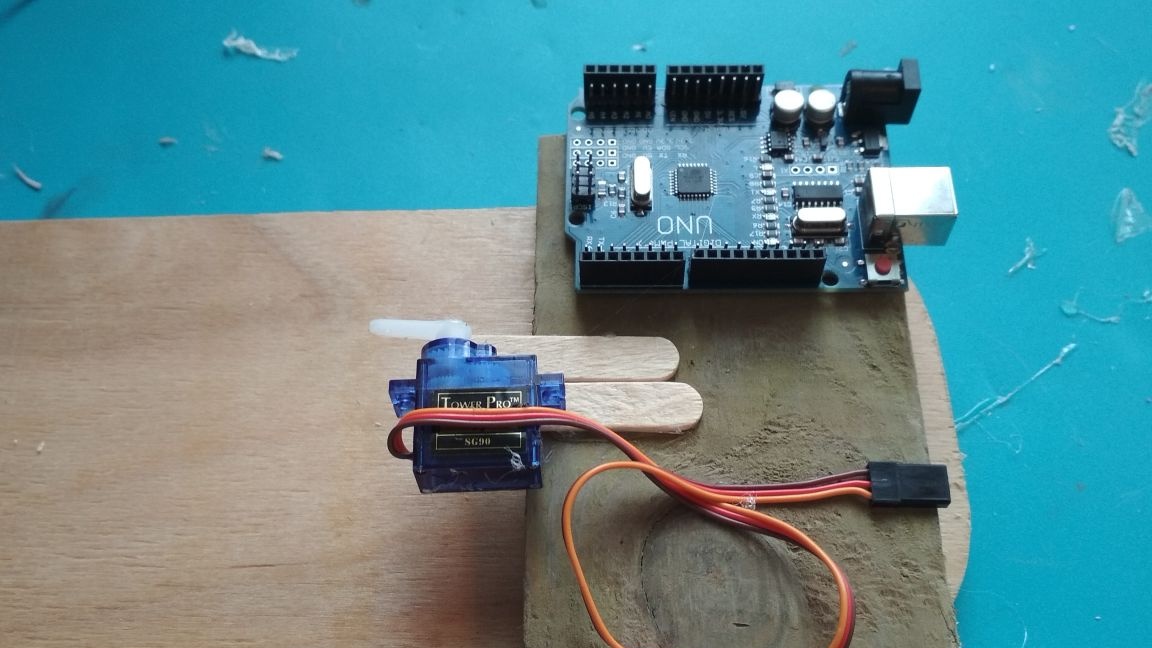
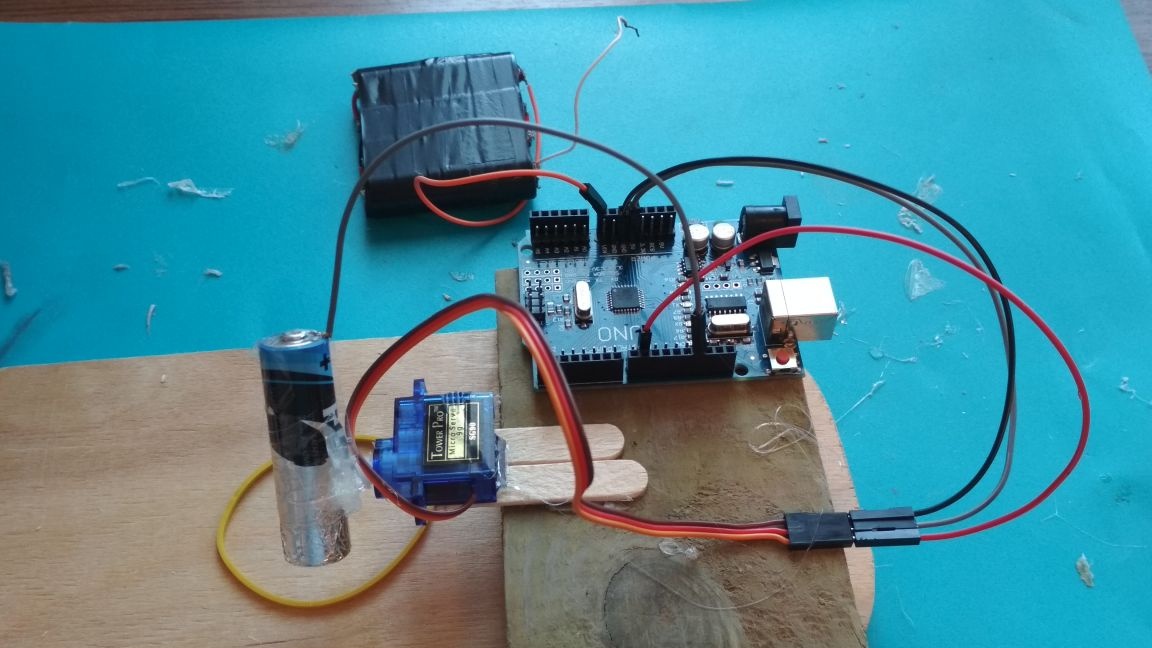
Mēs uzliekam vadus un līmējam servodzinēja izvadi līdz tāfeles malai:
Pievienojiet 3 tēta-mammas vadus, vēlams dažādās krāsās, lai nesajauktos
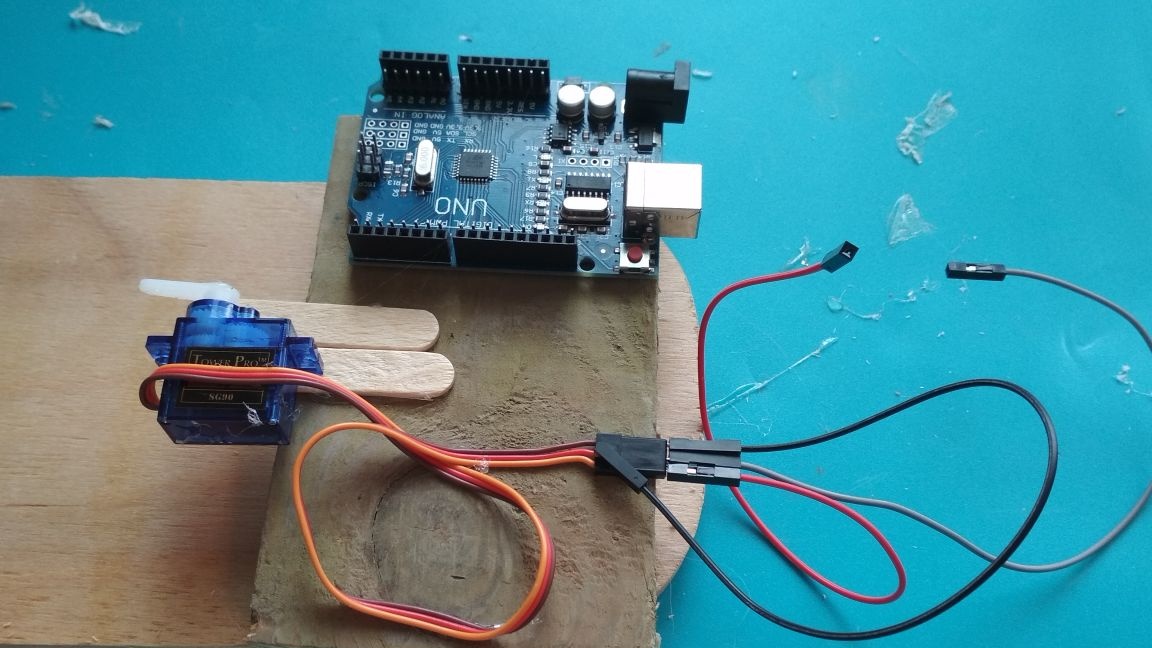
Mēs savienojam servo piedziņu ar Arduino plati šādi:
brūns vads līdz gnd
-Sarkanais vads līdz 5v
- oranža vads līdz 9 "digitālajai pin"
Ja jums nav irbuli, piemēram, manējā, tad neliecieties, to ir ļoti vienkārši izdarīt.
Mēs pēc iespējas cieši paņemam regulāru pirkstu bateriju un negatīvo pusi, iesaiņojam to ar foliju un pēc tam ļoti cieši līmējam:

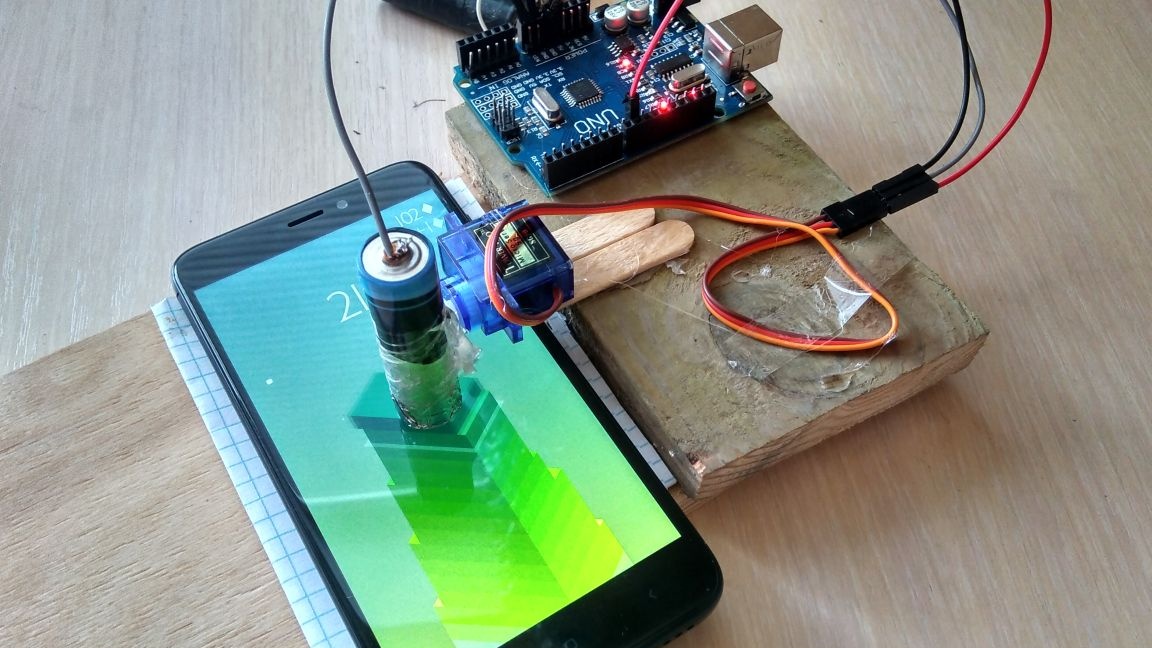
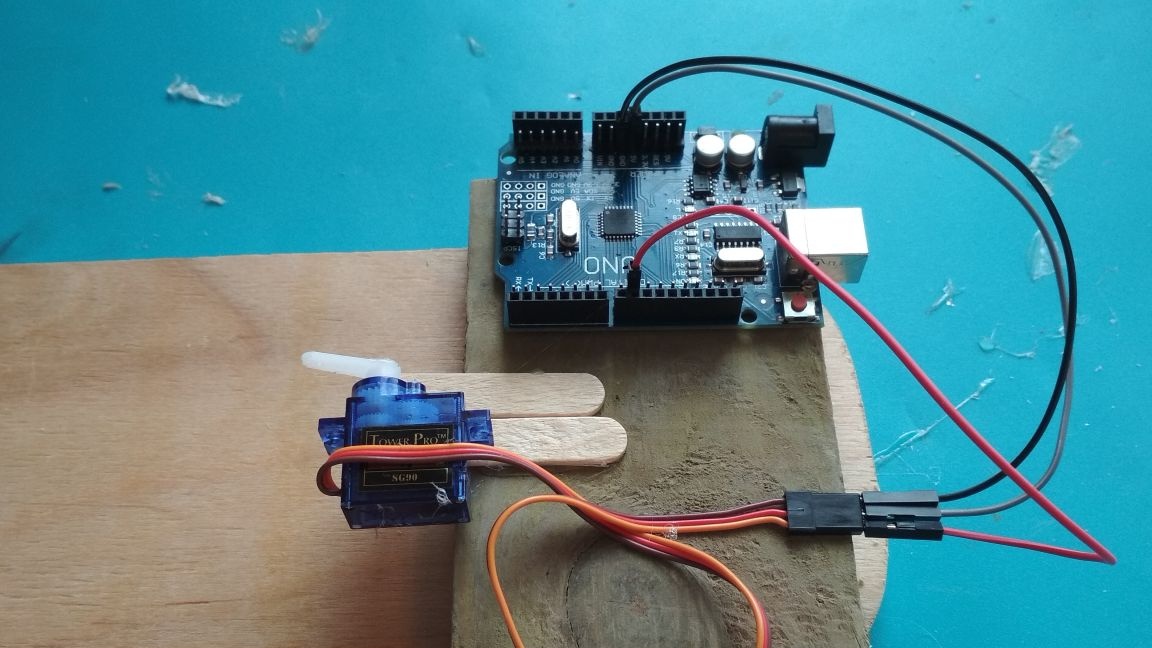
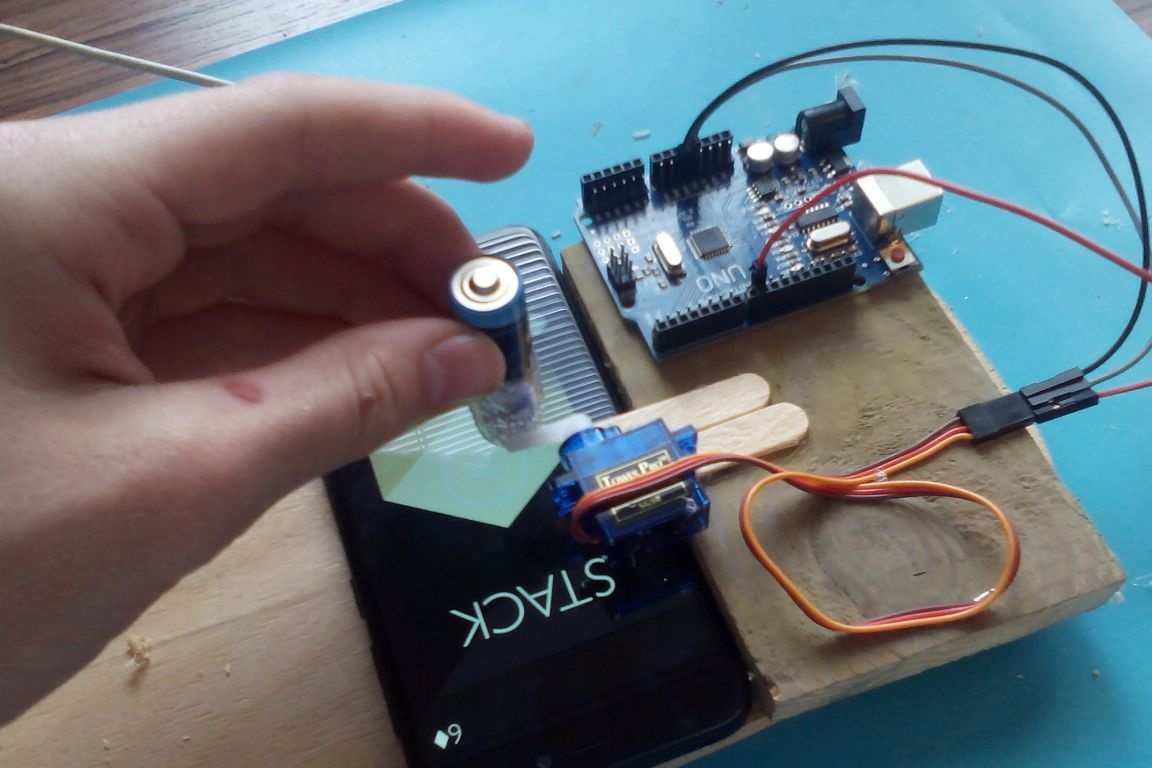
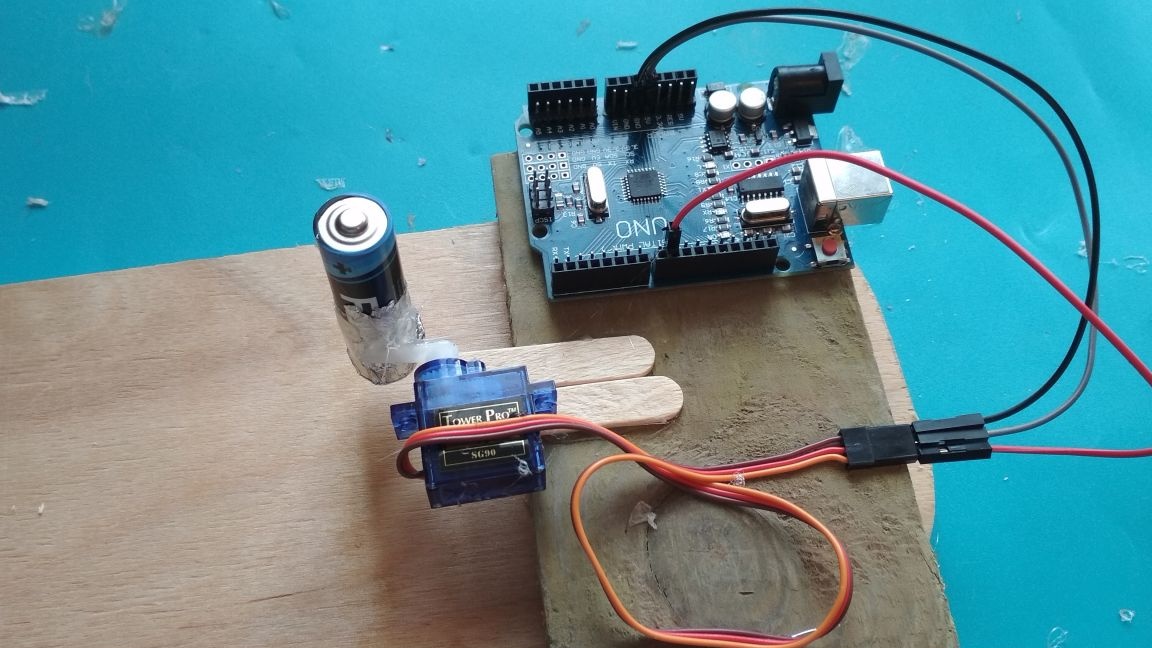
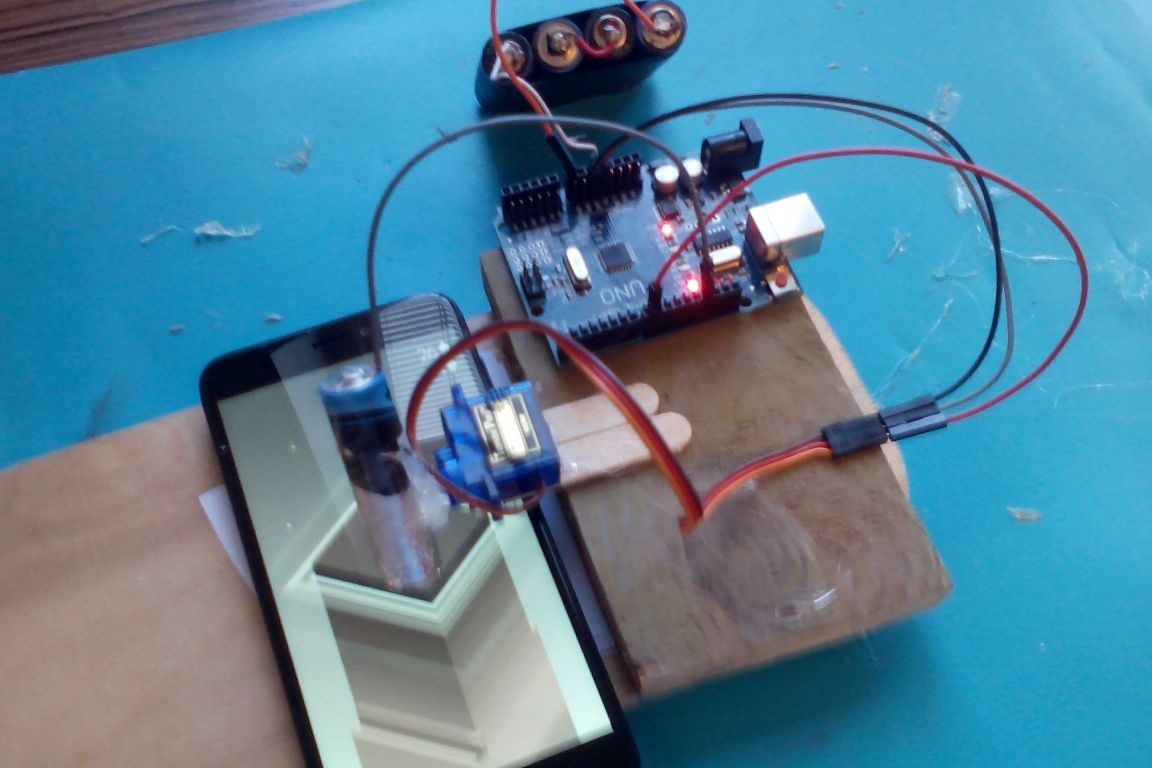
Tagad jums ir jāpieliek tālrunis uz saplākšņa zem servomotora, jāpiestiprina akumulators augšpusē un jāpiezīmē, kādā līmenī mēs pielīmēsim mūsu "irbuli". Pēc tam, kad esam visu pamanījuši, stingri pielīmējiet “irbuli” pie servomotora sviras, stingri 90 grādu leņķī (tam pašam leņķim vajadzētu būt, lietojot “irbuli” tālrunim, kad mēs to izmērījām). Visam vajadzētu darboties tā, kā parādīts fotoattēlā:

Tagad mēs savienojam savu "robotu" ar datoru caur portu, kas ir konfigurēts Arduino IDE, palaidiet iepriekš nosaukto Arduino IDE un nokopējiet zemāk esošo skici, pēc tam noklikšķiniet uz pogas "lejupielādēt". Ja viss tiek izdarīts pareizi, skice tiks ielādēta bez kļūdām, un pēc dažām sekundēm servomotors sāks darbu. Ja jums ir būtiskas atšķirības irbuli un servomotoru izmēros, tad izveidojiet šo skici sev, tas ir pavisam vienkārši.
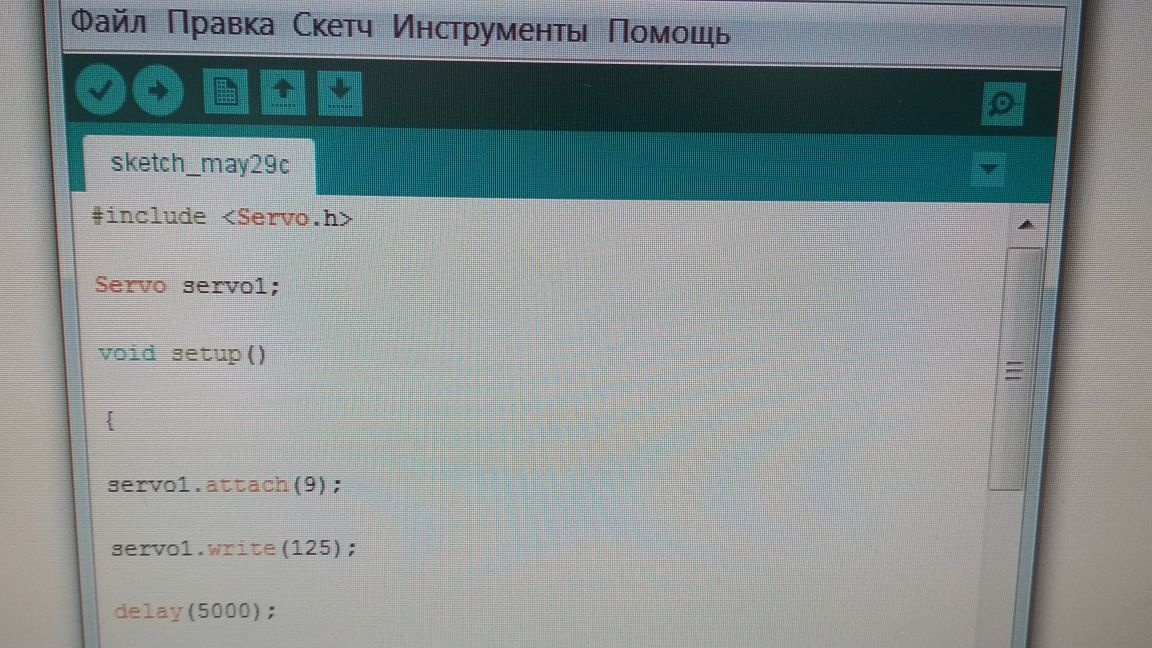
Šeit ir skice:
# iekļaut
Servo servo1;
iestatīšana nav spēkā ()
{
servo1.attach (9);
servo1.write (125);
kavēšanās (5000);
servo1.write (90);
kavēšanās (200);
servo1.write (125);
kavēšanās (750);
}
tukšs cilpa ()
{
servo1.write (90); // 1
kavēšanās (200);
servo1.write (125);
kavēšanās (600);
}Izmantojot līmlenti vai elektrisko lenti, mēs "mātei mātei" tipa stieples nogriezto pusi ar nogrieztu “mātes” izeju novirza uz mūsu “irbuli” plus pusi un šo vadu izvada Gndā Arduino:
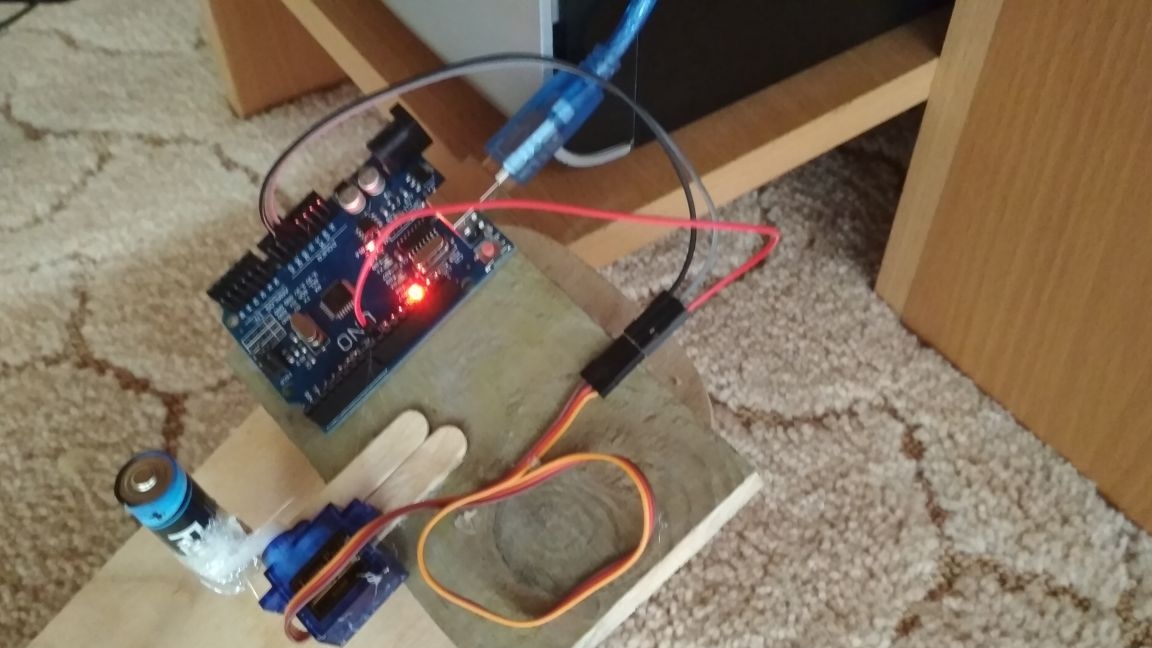
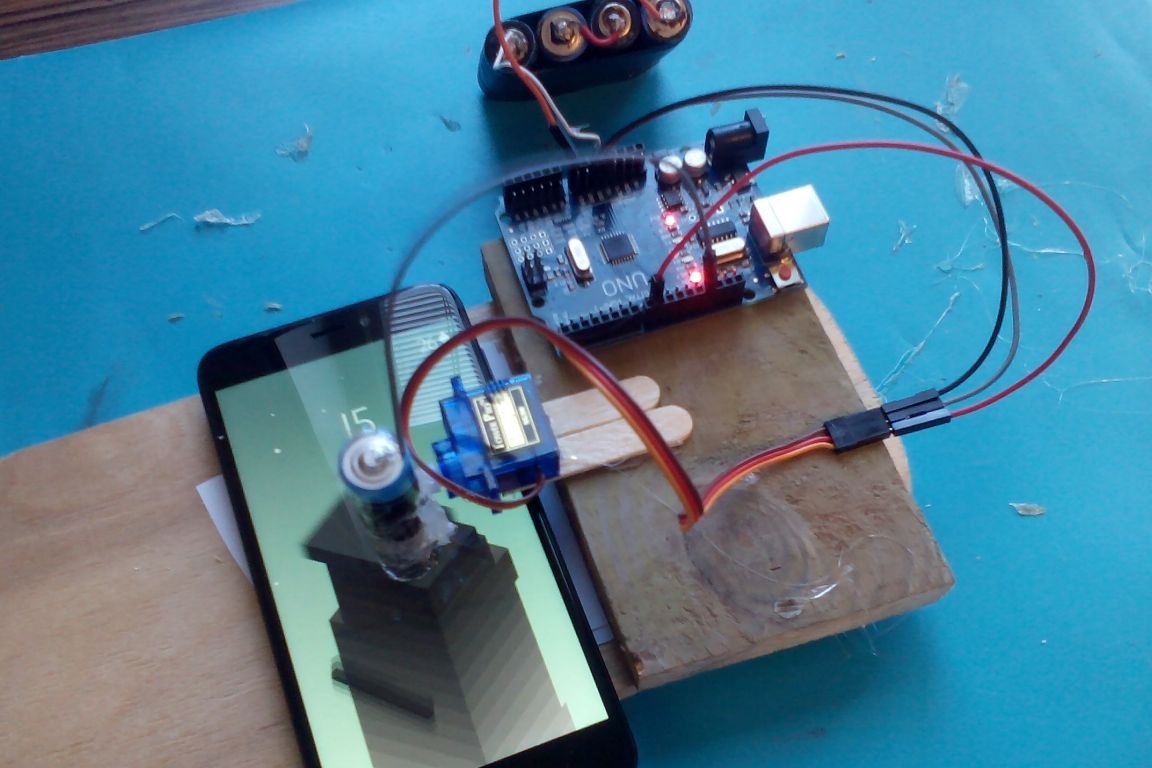
Nu, tas arī viss! Mūsu vienkārši robots gatavs, un atliek tikai to pārbaudīt! Lai to izdarītu, novietojiet tālruni zem irbuli, palaidiet lietojumprogrammu Stak un novietojiet tālruni tā, lai tas būtu virs pogas “atskaņot”, uz kuru norāda bultiņa, mēs arduino savienojam ar jaudu vai nu ar īpaša adaptera palīdzību, vai arī mēs izvadīsim plusu no mūsu “akumulatora” uz Uin uz Arduino, un mīnus. gnd. pēc strāvas pievienošanas mūsu robots tūlīt sāk "spēlēt". Un, lai arī sakarā ar to, ka es izmantoju nevis parasto irbuli, bet gan akumulatoru, mūsu robots diezgan bieži neiekļuva tempā un palaida garām, tas "ilgu laiku spēlēja. Ja viss tiek izdarīts ļoti precīzi, tas parasti spēlē, līdz tālrunis nokrīt.

Paldies visiem par uzmanību!