


Es izstrādāju daļu no Lego Technic 42029 montāžas instrukcijām. Pārējais ir mana improvizācija. Tātad mums ir nepieciešams:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (labāk nekā Populus, bet jums var būt arī ķīniešu kolēģis)
- 2 servo piedziņas ierīces SG-90
- IR uztvērējs
- motora pārnesumkārba 200 apgr./min
- 2 gaismas diodes
- 2 rezistori 150 omi
- Kondensators 10v 1000uF
- 2 vienas rindas ķemmes PLS-40
- 2 PBS-20 savienotāji
- Induktors 68mkGn
- 6 NI-Mn 1.2v 1000mA baterijas
- savienotājs tētis-mamma ar divu kontaktu ar vadu
- Homutiks
- dažādu krāsu vadi
- lodēt
- Rosins
- kancelejas nazis
- lodāmurs
- Skrūves 3x40 un tiem paredzētie uzgriežņi un paplāksnes
- Skrūves 3x60
- Baterijas Ni-Mn 1.2v 1000mA 6gab.
1. solis mēs savācam suspensijas aizmuguri.
Pirmkārt, jums ir jāsamontē balstiekārtas aizmugure saskaņā ar Lego 42029 1. daļas instrukcijām, sākot no 3 lapām un 8 ieskaitot. Tālāk pievienojiet dažas detaļas, lai jūs varētu uzstādīt motoru un pārnesumkārbu.
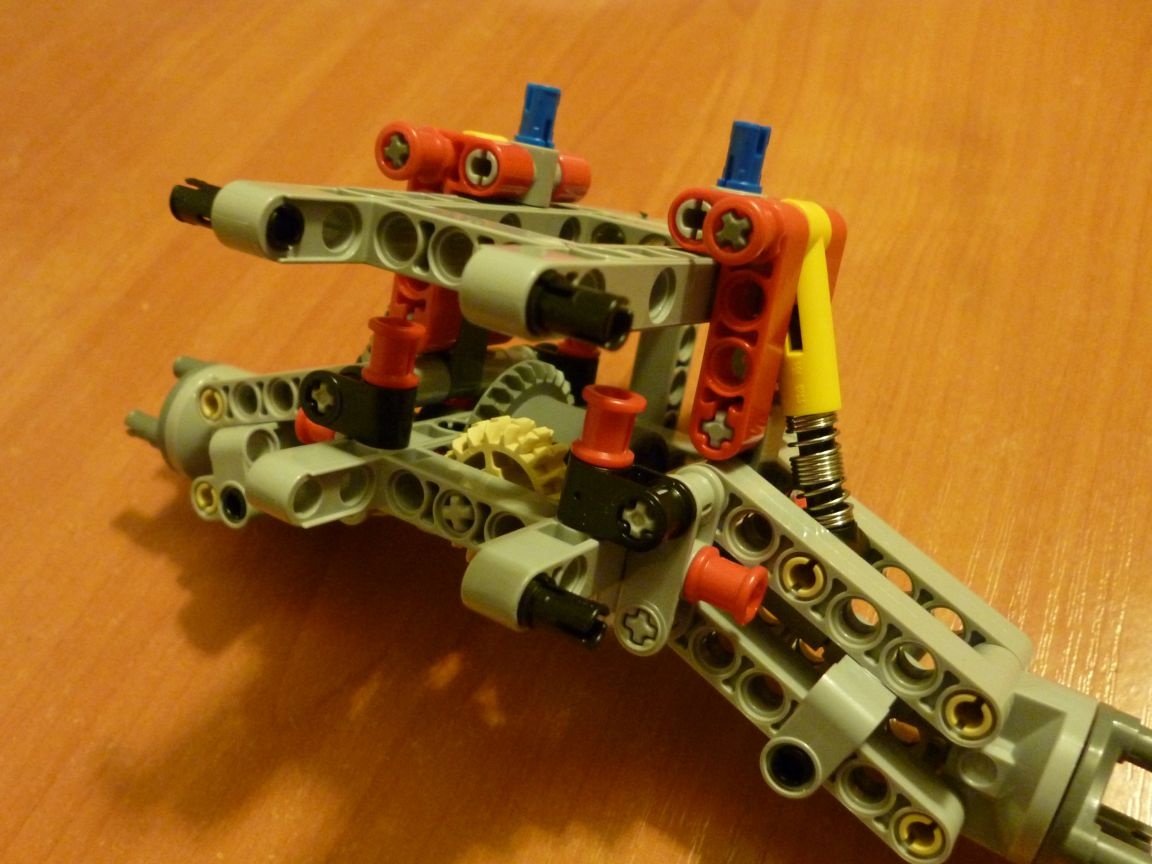
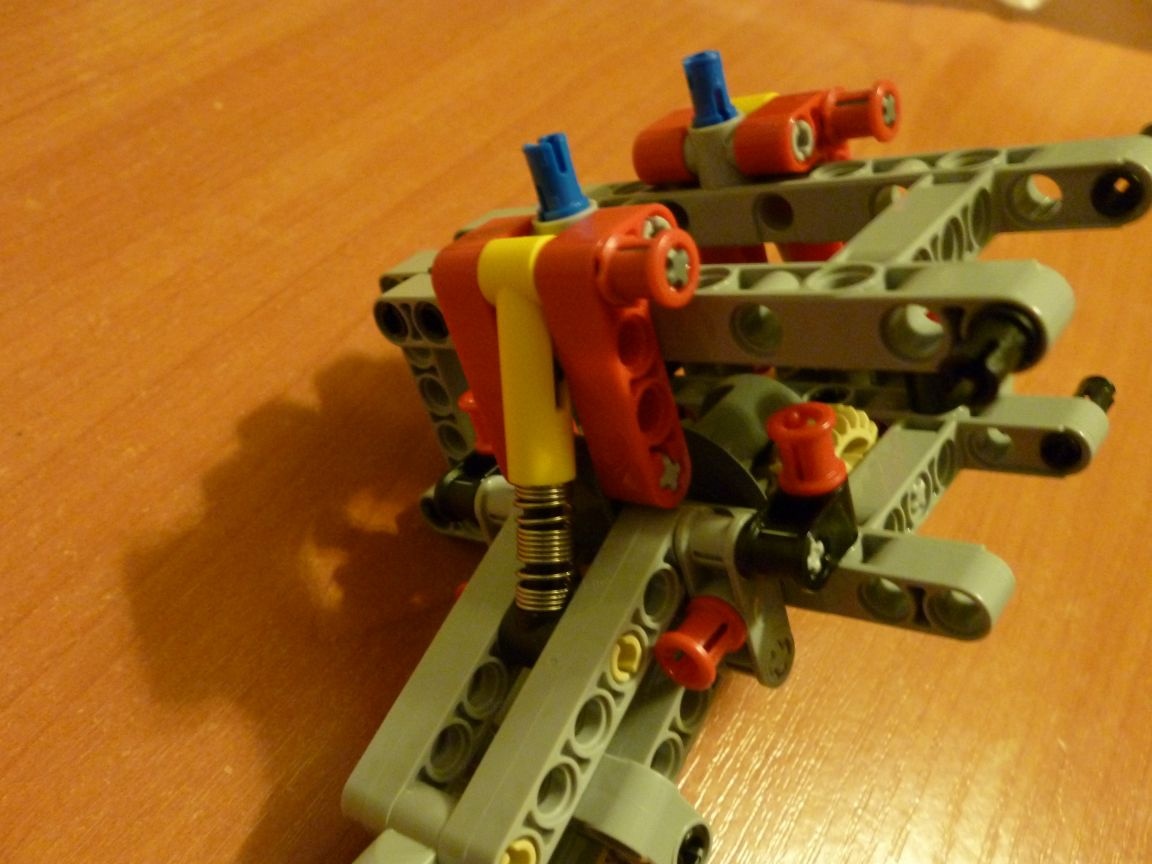

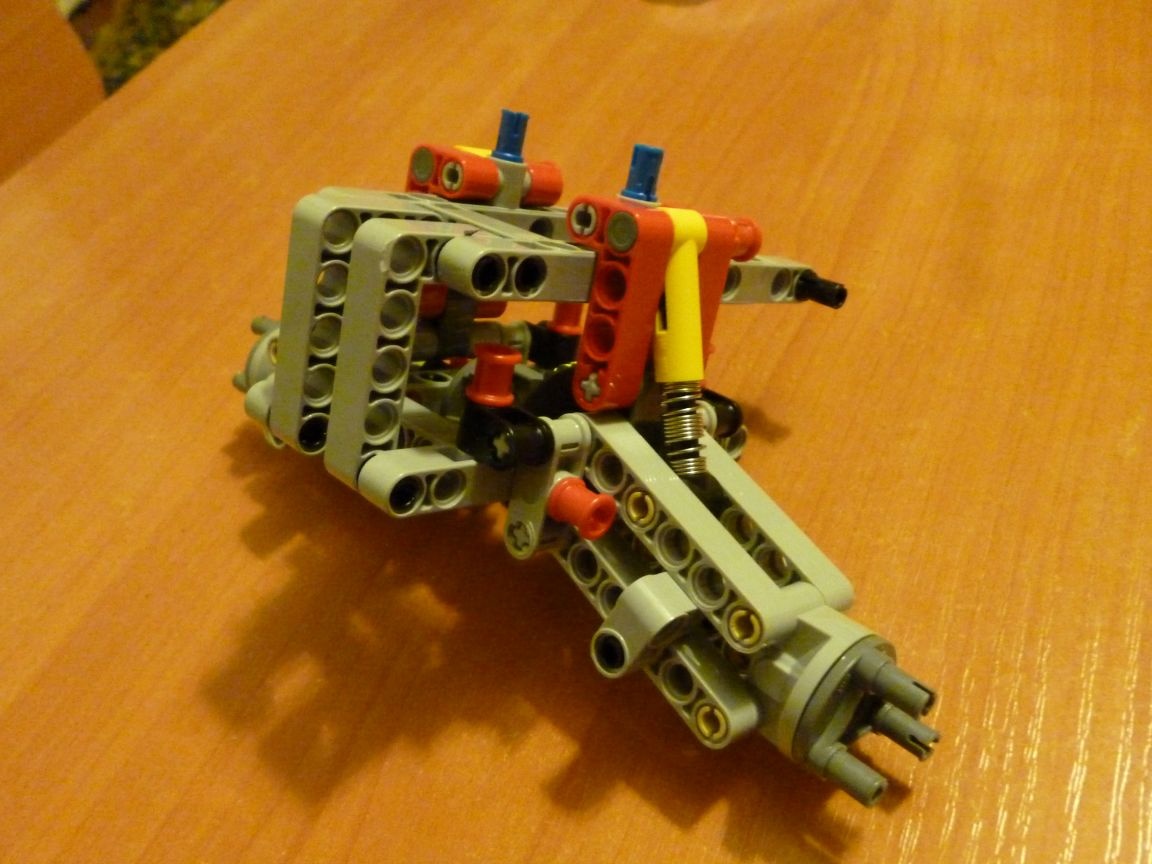
2. solis priekšējā piekare.
Mēs saliekam balstiekārtas priekšējo daļu saskaņā ar Lego 42029 1. daļas instrukcijām, no 21. līdz 23. lappusei. Mēs uzņemam trapeces no Lego instrukciju otrās daļas no 6. līdz 11. lapai. Vinča tiek montēta no 14. līdz 22. lapas otrajai daļai, un bufera daļas otrā daļa ir 34-36 lapas.
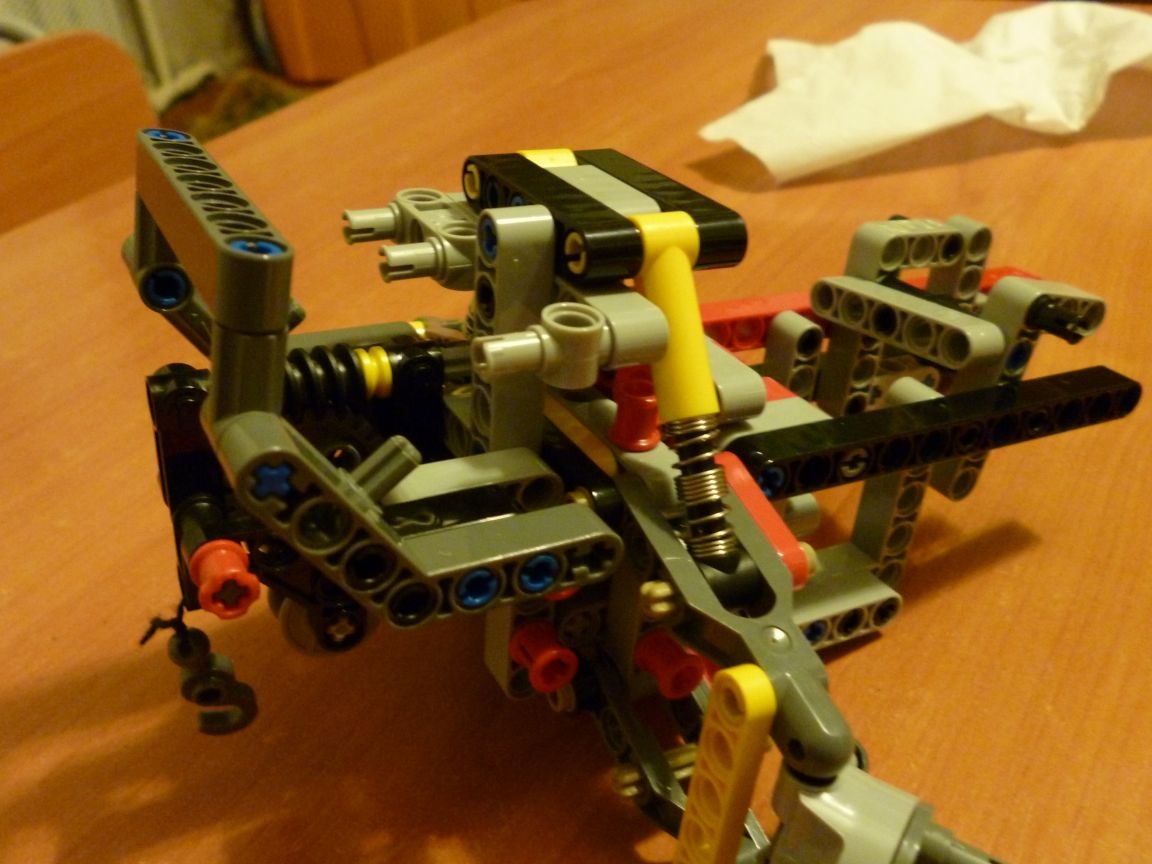
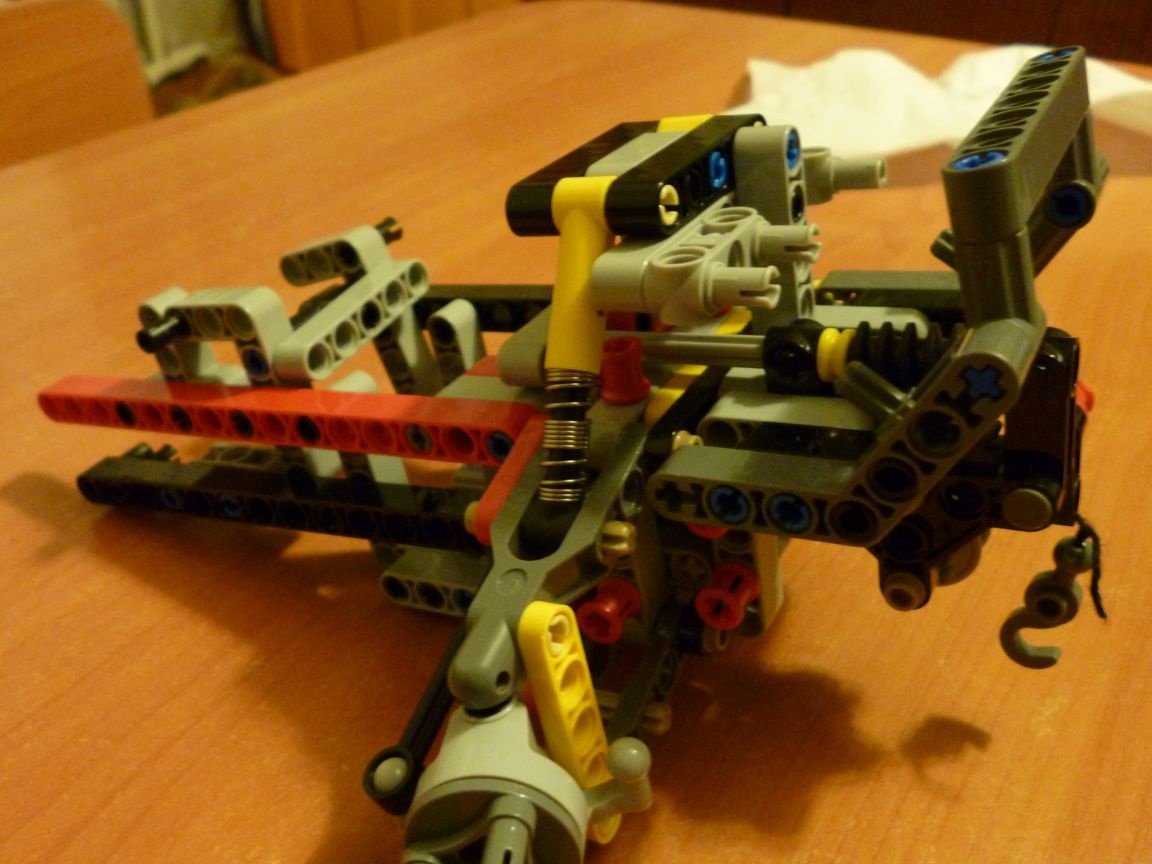
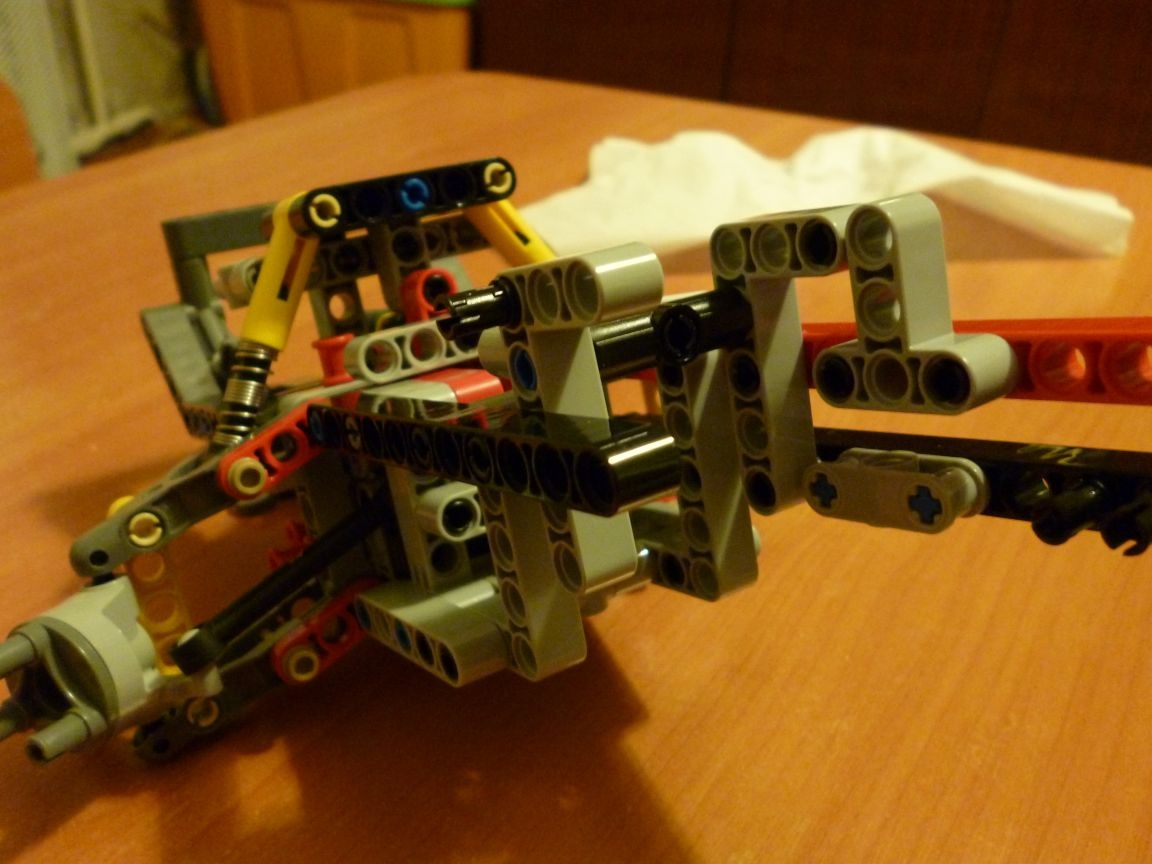
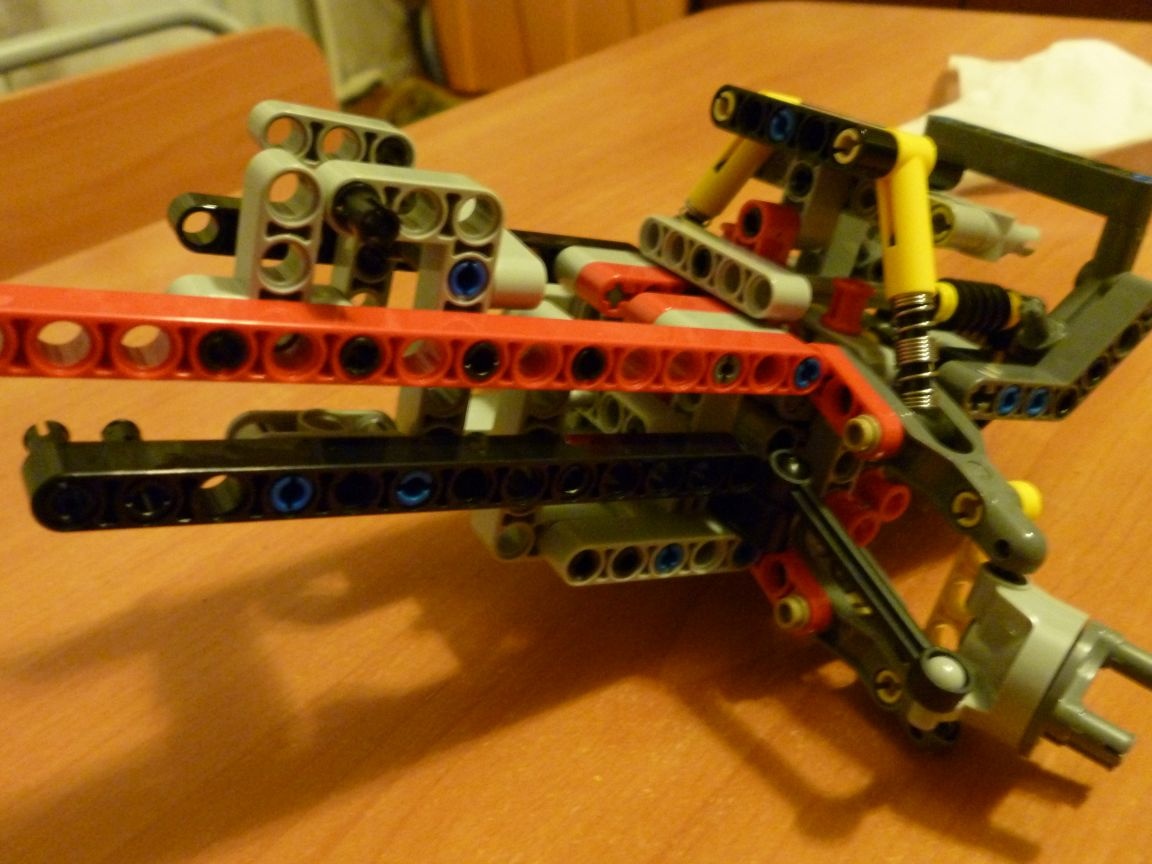

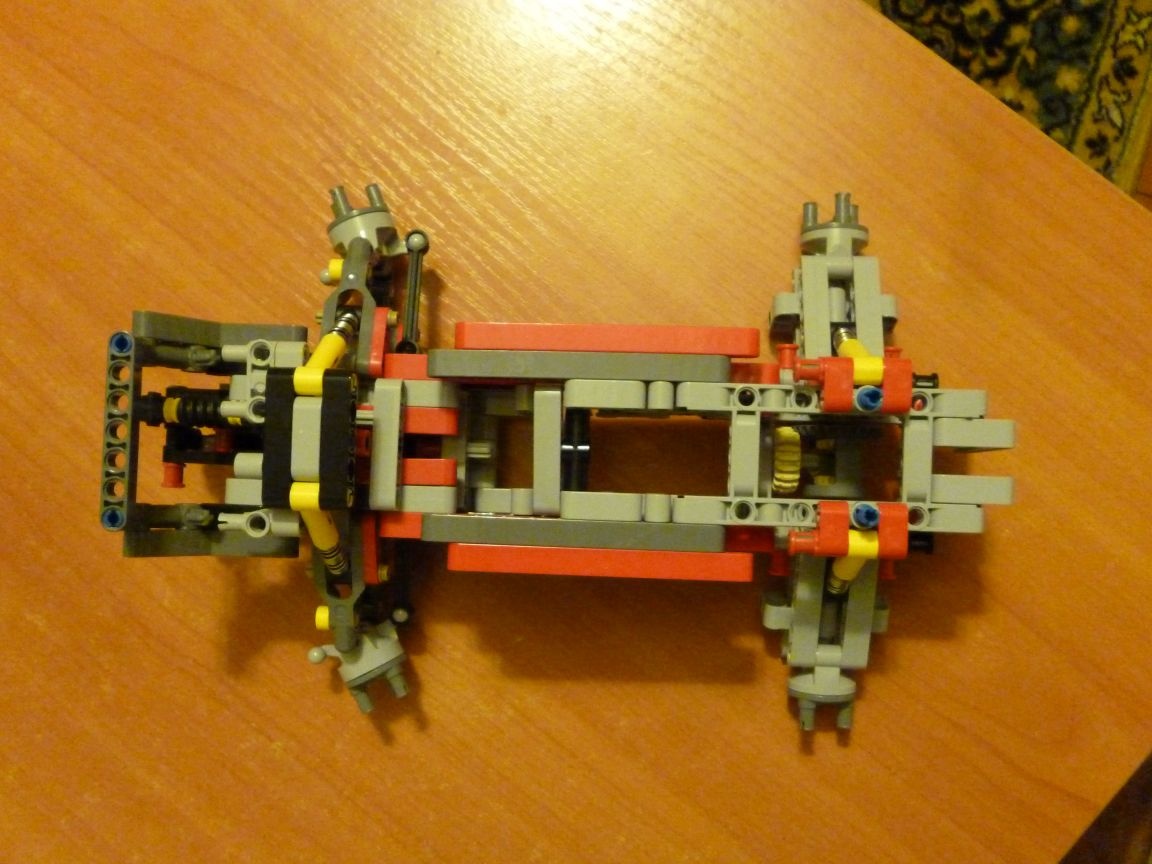
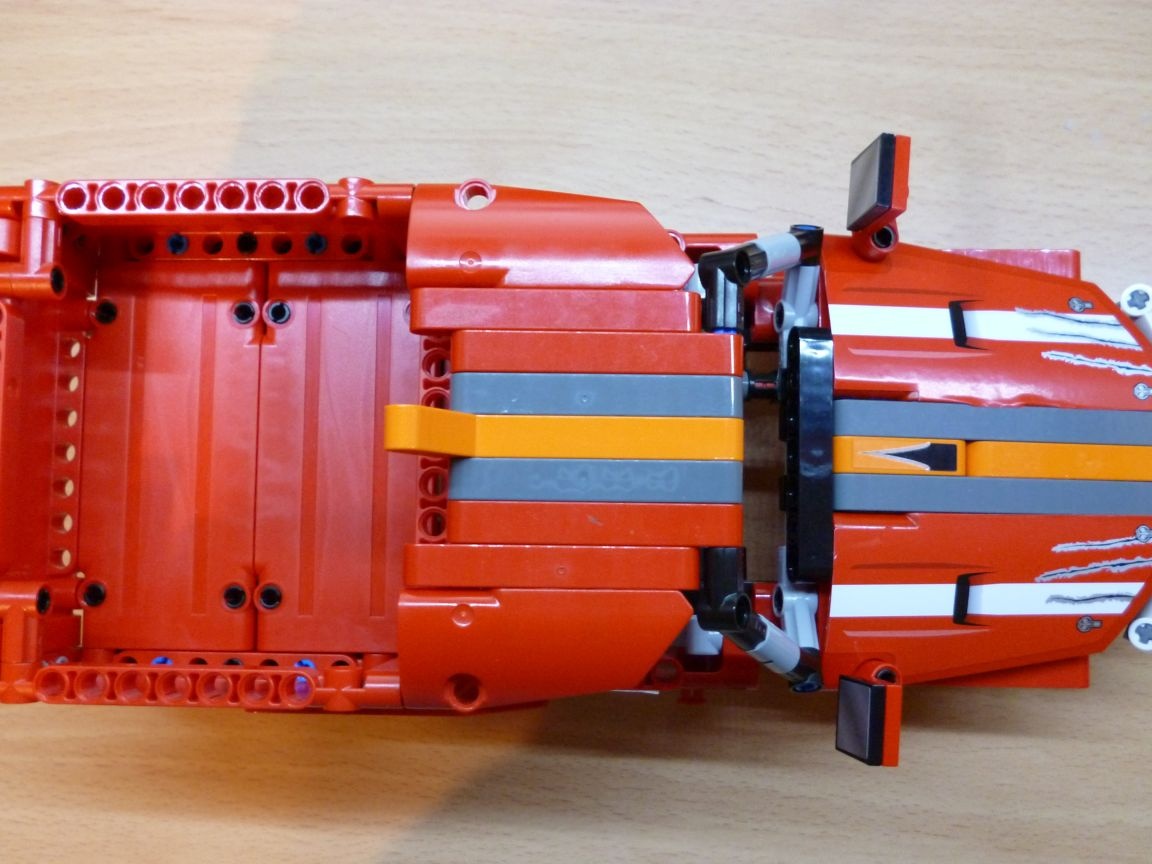
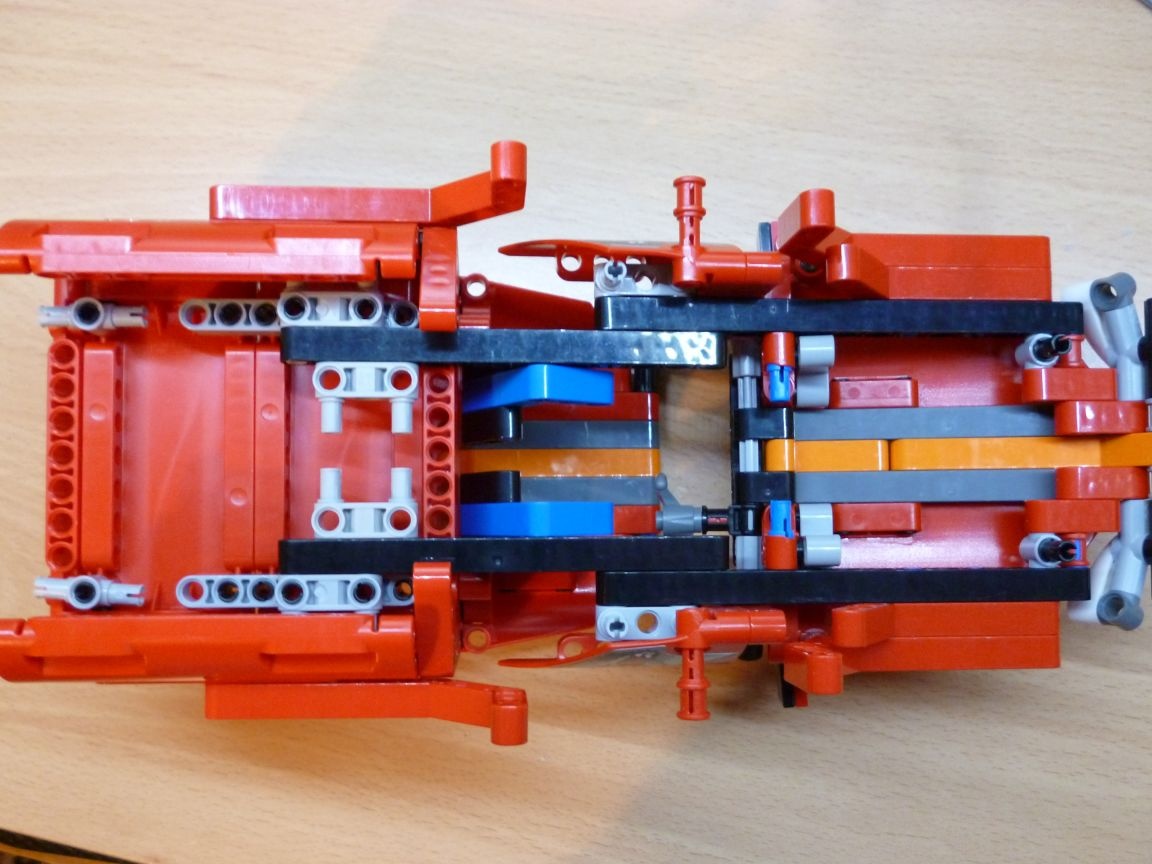
3. solis salieciet šasiju.
Mēs savienojam abas detaļas, kā parādīts fotoattēlā:

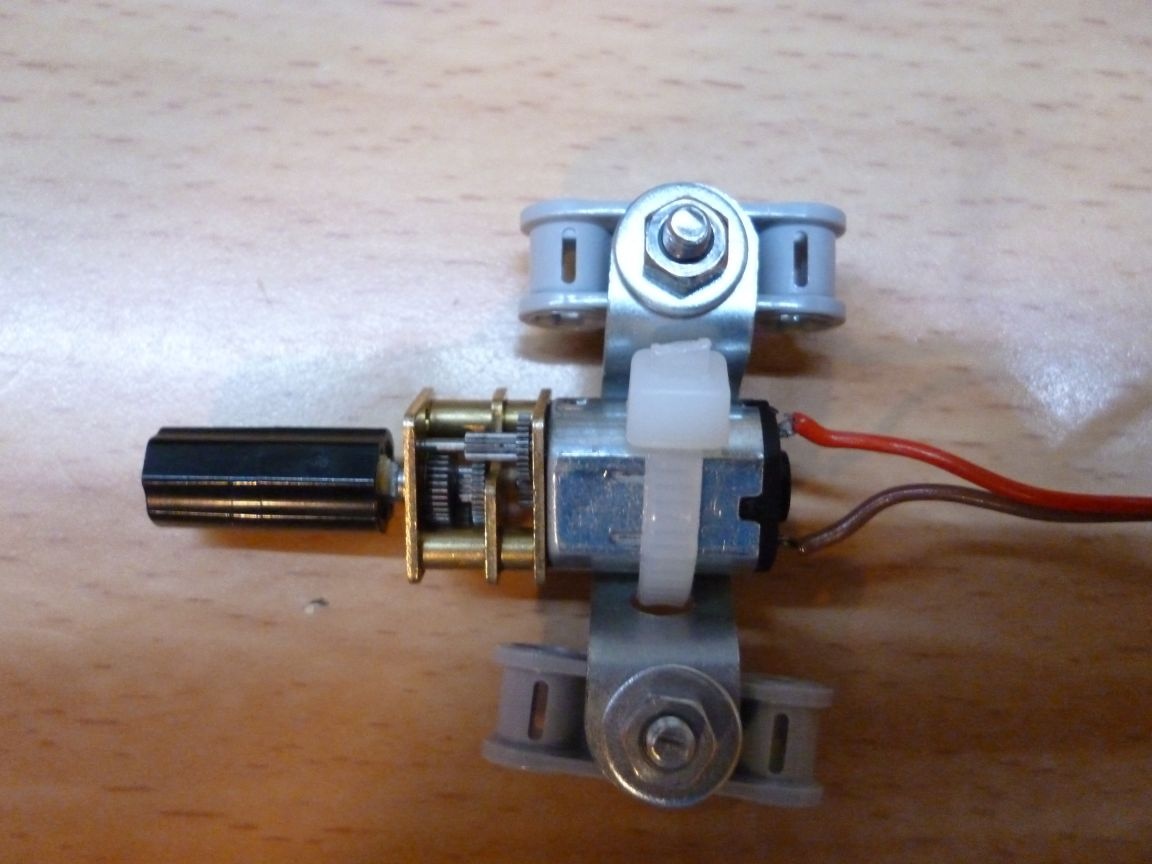
Reduktora motora un dizainera detaļu savienošanas problēmu es atrisināju šādi: es uzliku savienojošo uzmavu uz reduktora motora ass un ievietoju sērkociņa lūžņus stiprināšanai. Reduktora motora montāžai izmantota metāla plastmasa no dzelzs izstrādātāja un skava.
Izrādījās šādi:
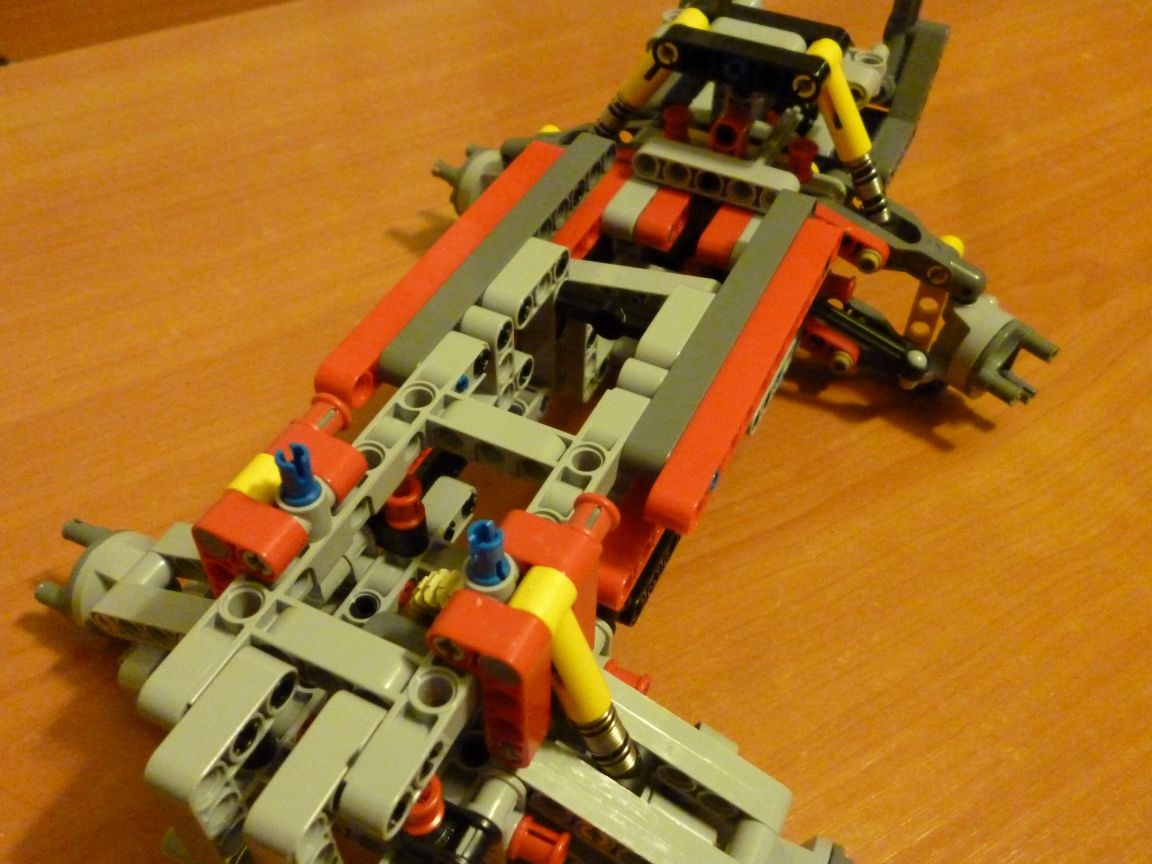
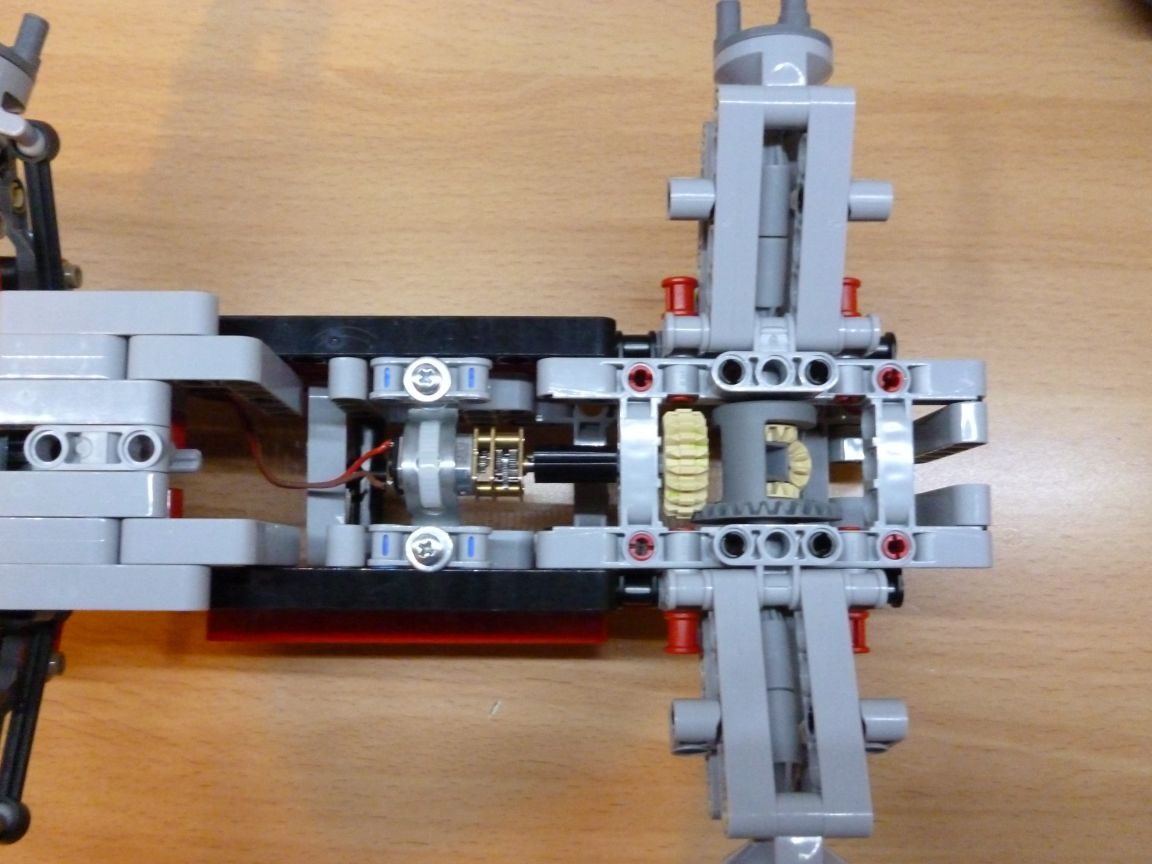
Uzstādīšana uz šasijas:
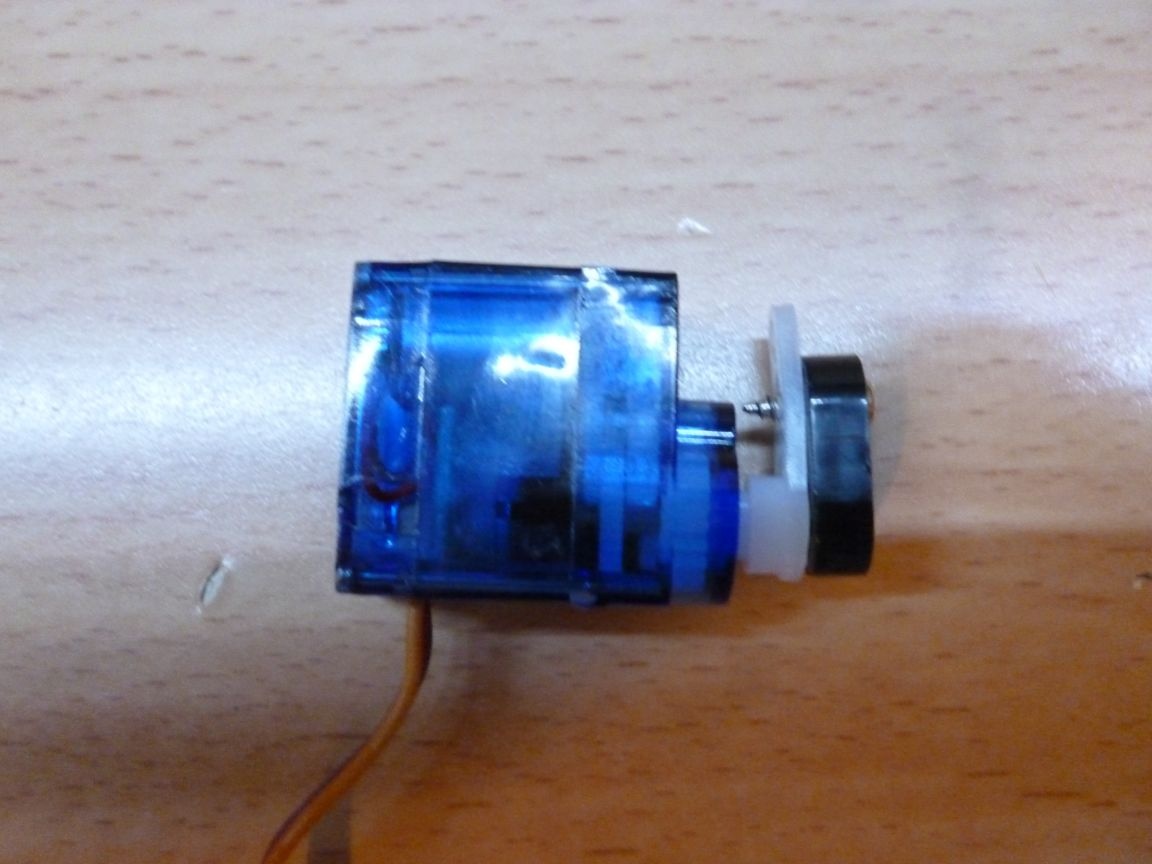
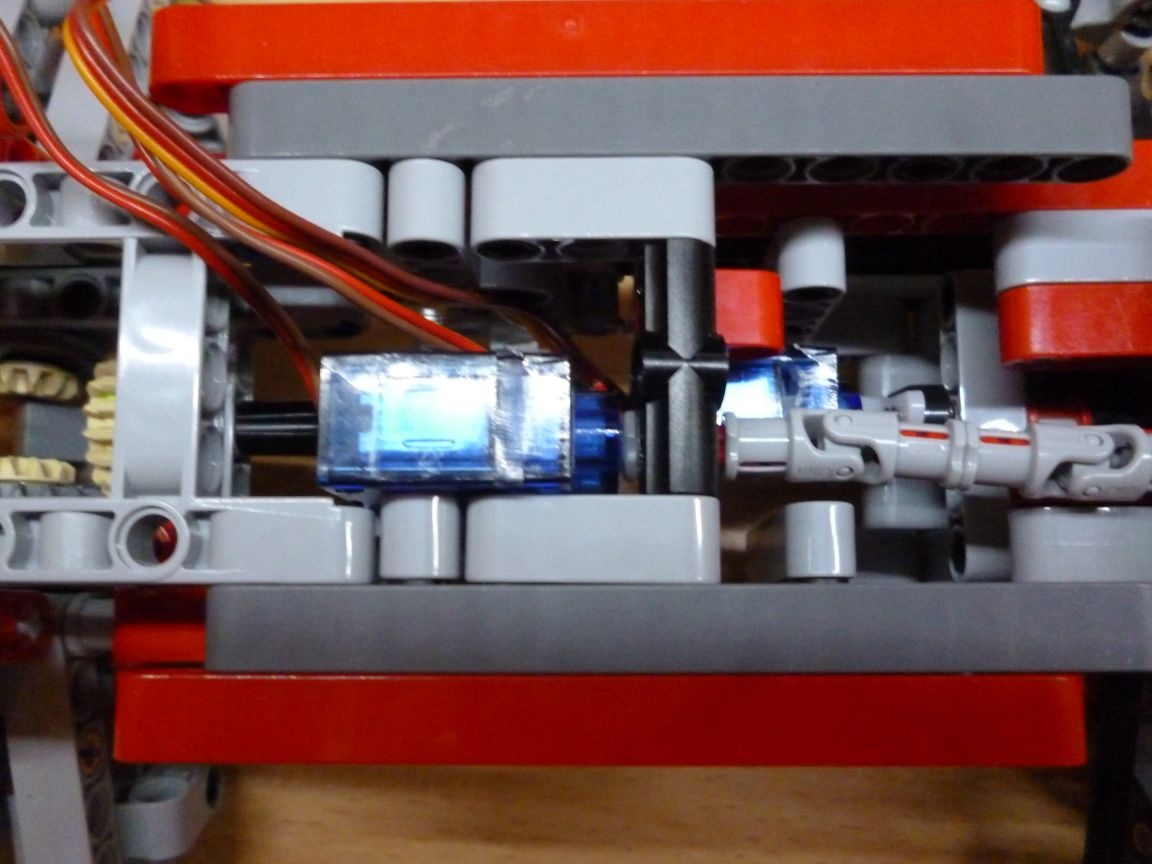
Lai veiktu pagriešanu, paņēma servo SG-90. Ir nepieciešams rūpīgi urbt, lai nepieskartos iekšējām detaļām, caurumotu caurumu ar diametru 3,2 mm vai vienkārši sagriezt ar kancelejas nazi. Un arī nogrieziet izvirzītās daļas (stiprināšanai “spārnus”). Mēs iespraužam skrūvi izveidotajā caurumā un piestiprinām to ar uzgriežņiem. Uz servo vārpstas mēs uzliekam sviru ar pieskrūvētu daļu no lego:
Instalēt:
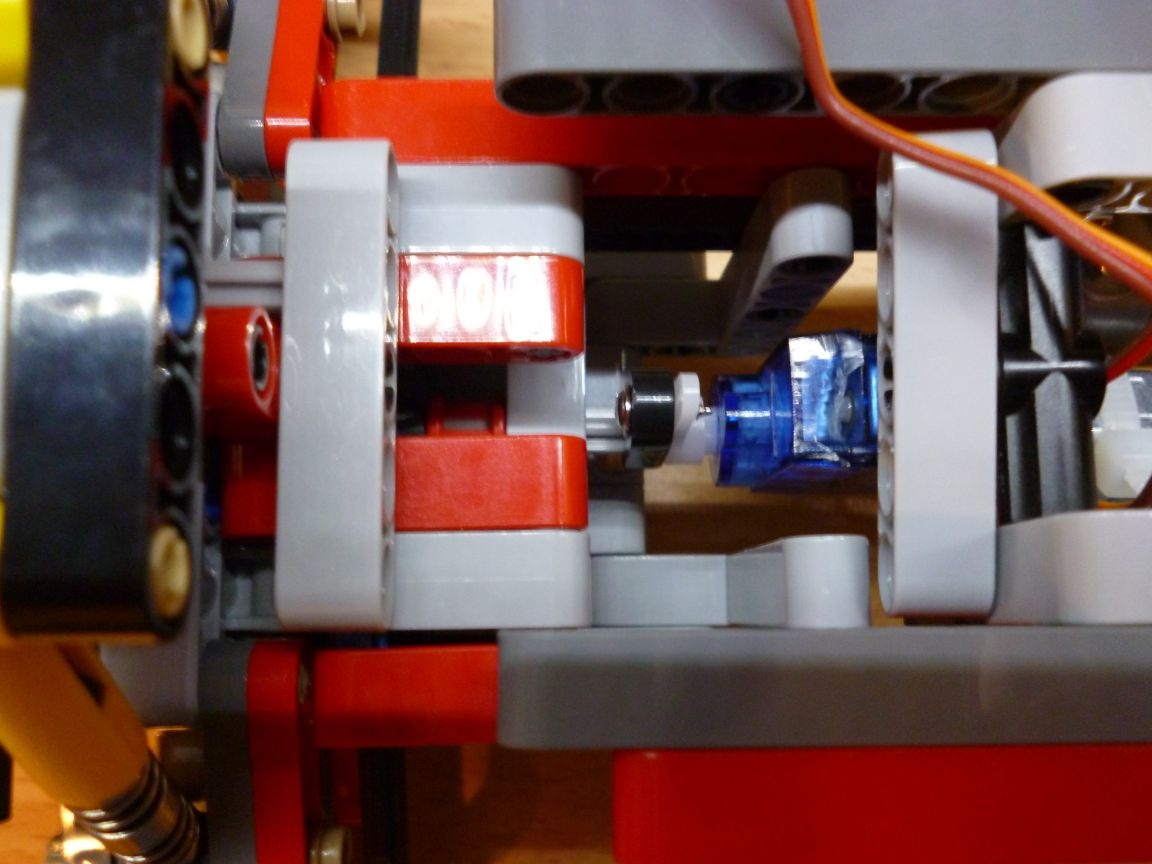
Vinčai izmantosim otro servo. Mēs rīkojamies tāpat kā ar pirmo. Un tagad tas ir jāmodernizē, lai tas varētu brīvi griezties. Lai to izdarītu, mēs izjaucam servo piedziņu, noņemiet dēli un lodēt vadus tieši pie motora. Mēs izņemam galveno pārnesumu un nogriežam tā pārvietošanās pieturas.Un visbeidzot, mēs izveidojam slotu ar pārrakstīšanas nazi uz galvenā pārnesuma, kā fotoattēlā:
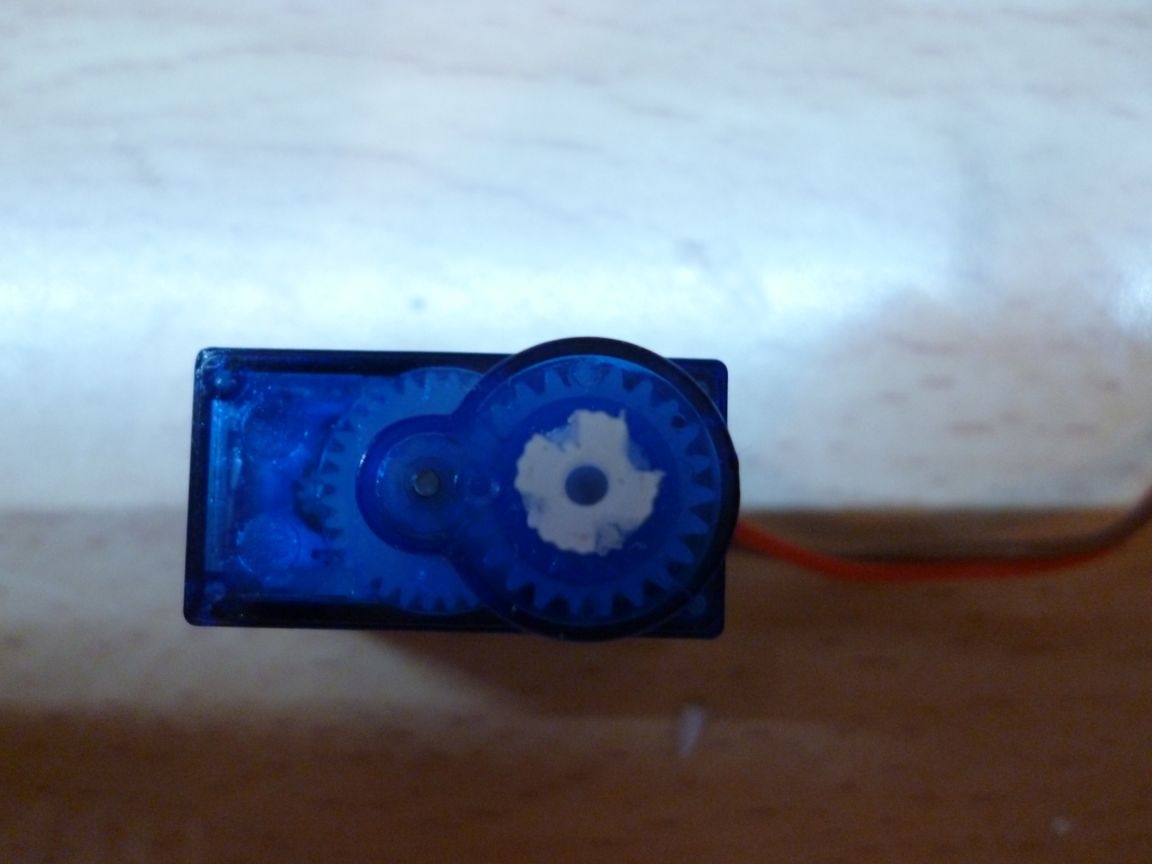
Mēs pieslēdzamies pie mūsu vinčas un uzliekam uz šasijas:

4. darbība. Kontroliera pārvaldīšana
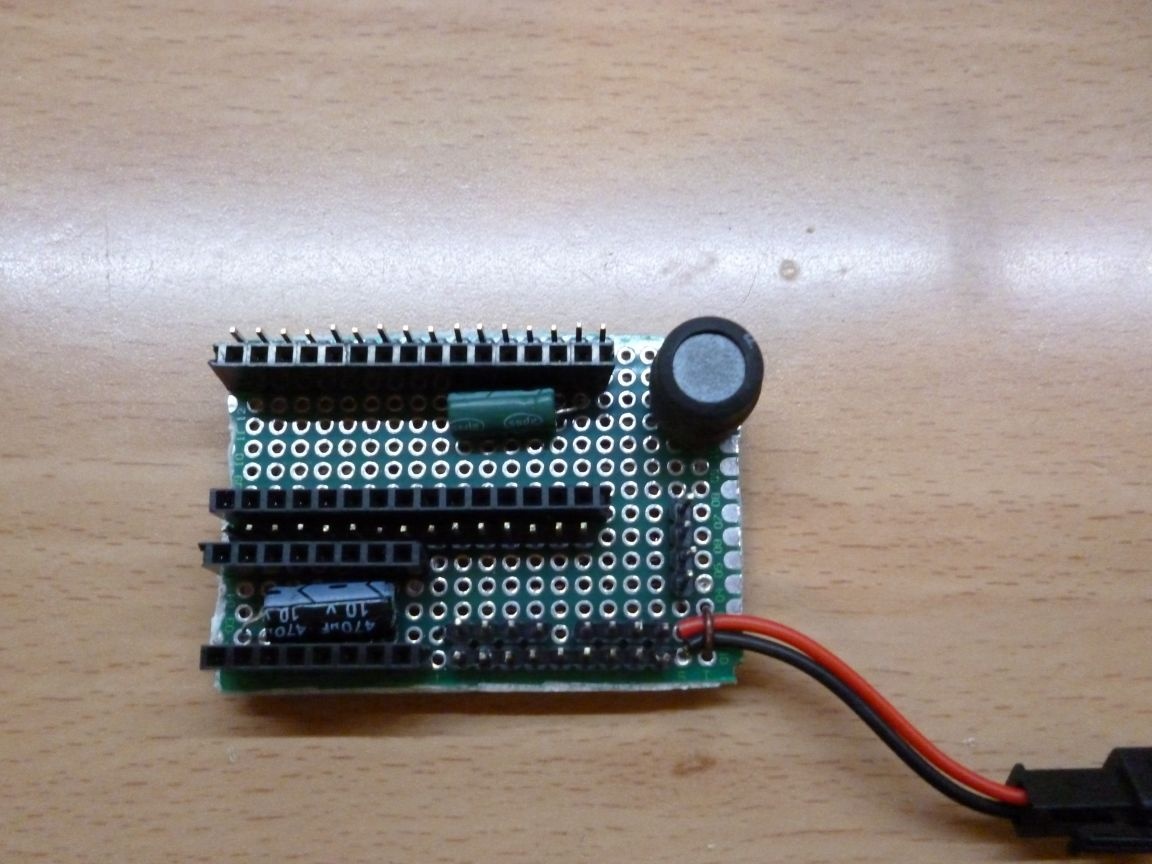
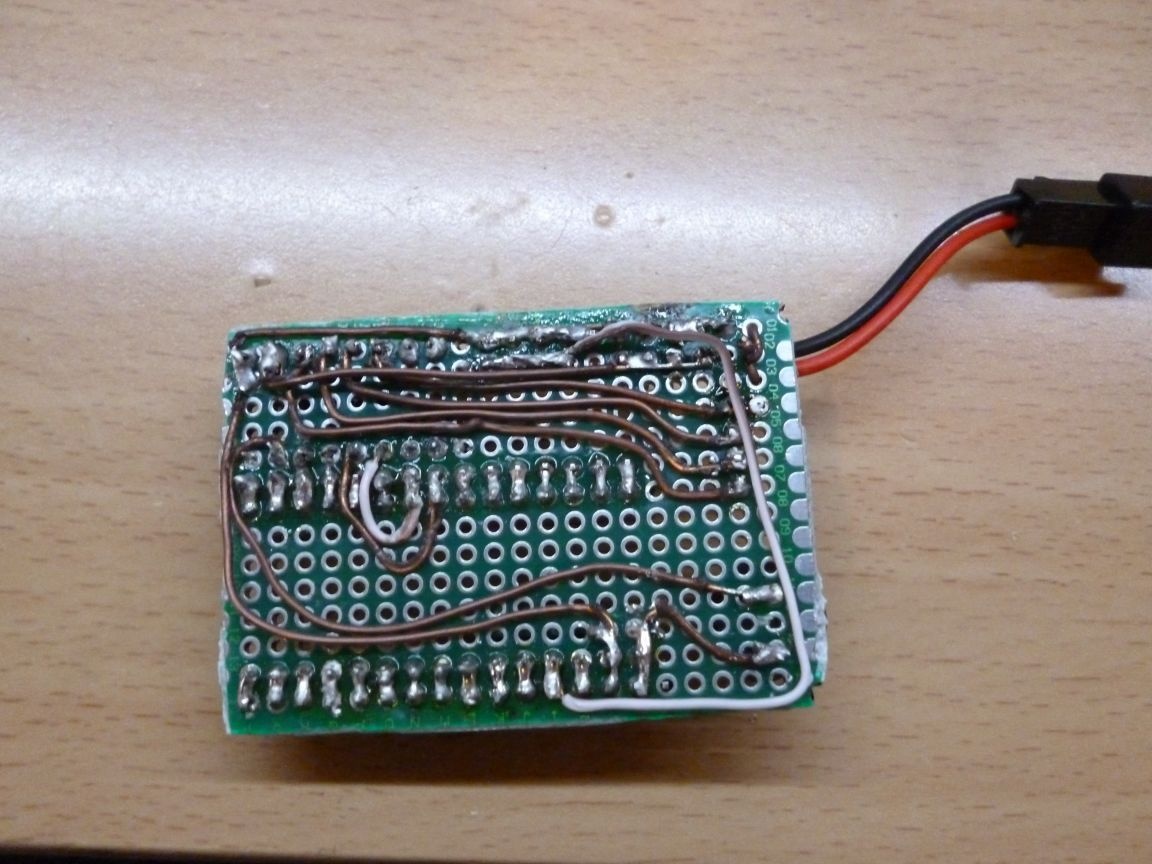
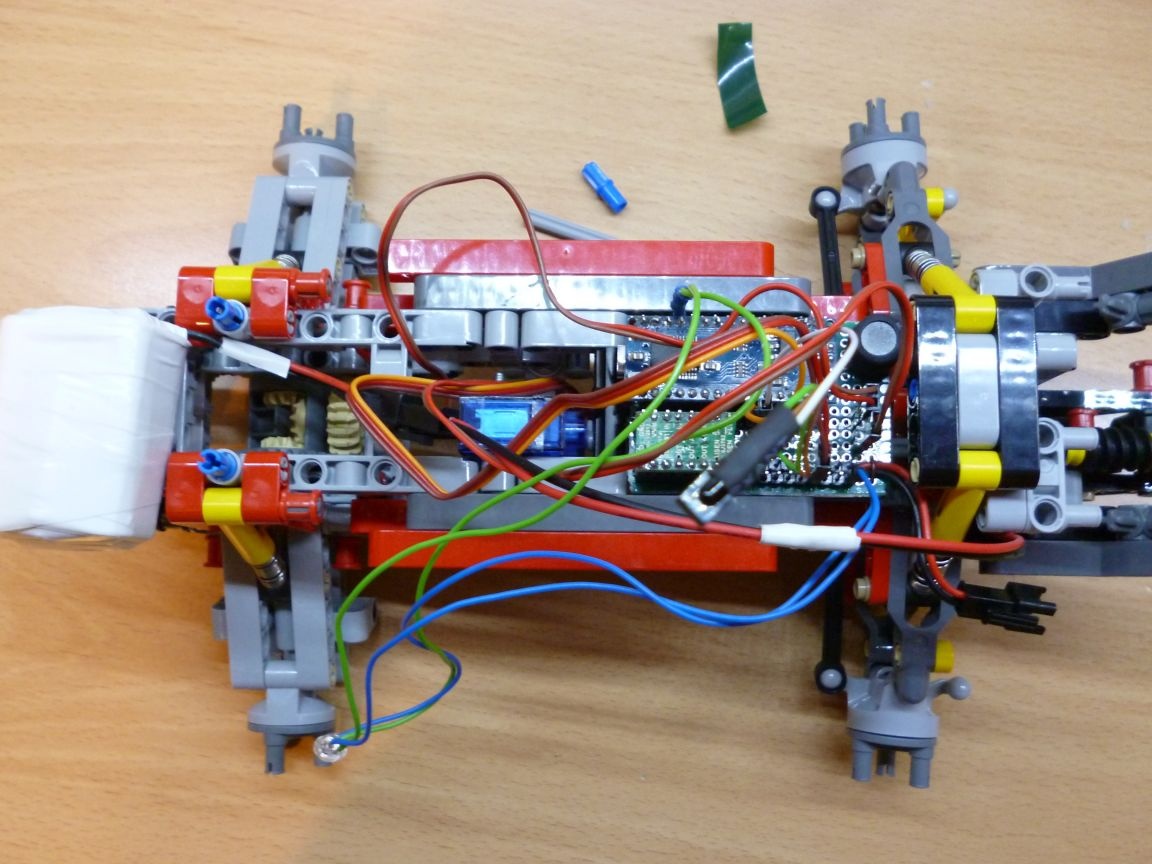
Kontrolēšanai mēs izmantosim Arduino un IR uztvērēju. Mēs uzņemam lodāmuru un uz shēmas plates saliekam sekojošo:
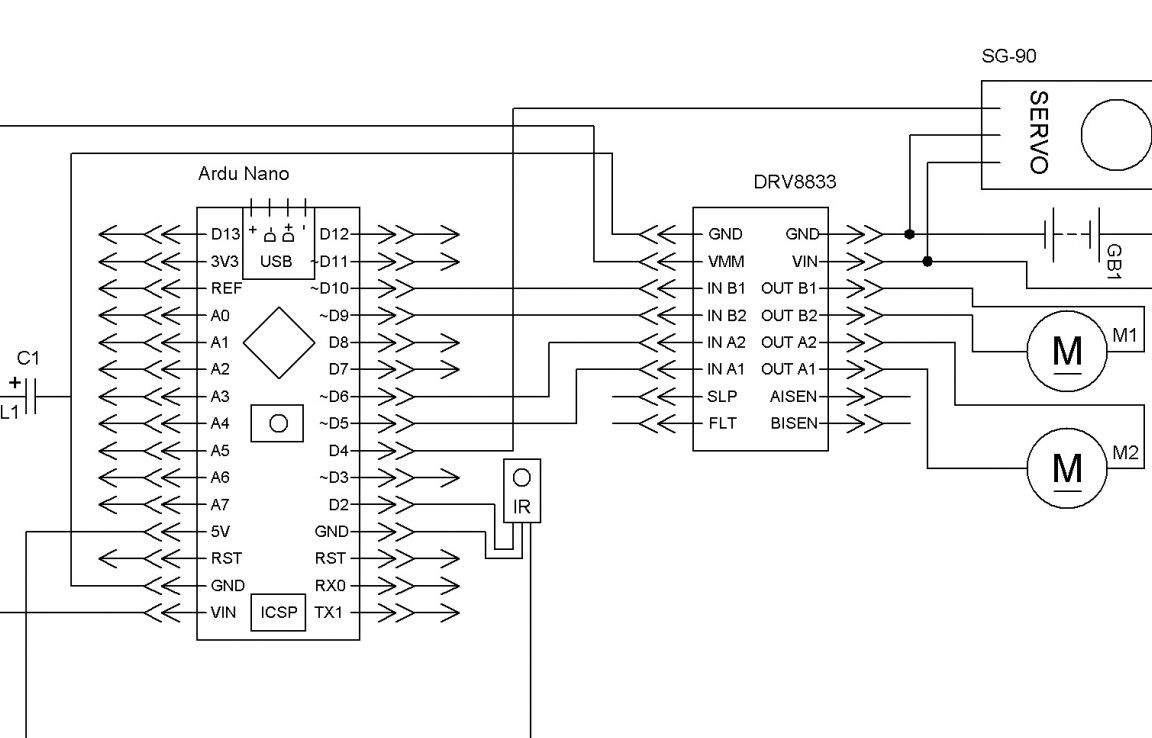
Es paskaidroju: jebkurš mazjaudas kondensators, induktivitātes spole, kuru jūs arī atradīsit, jums jānostabilizē mikrokontrollera spriegums. Izmantotajiem gaismas diodiem ir izvēlēti rezistori. IR uztvērēju vai TSOP var ņemt no vecas rotaļlietas vai iegādāties radio veikalā. Ja ir spēcīgi traucējumi, pievienojiet kondensatoru IR uztvērēja strāvas ķēdē.
Rezultātā mēs iegūstam:
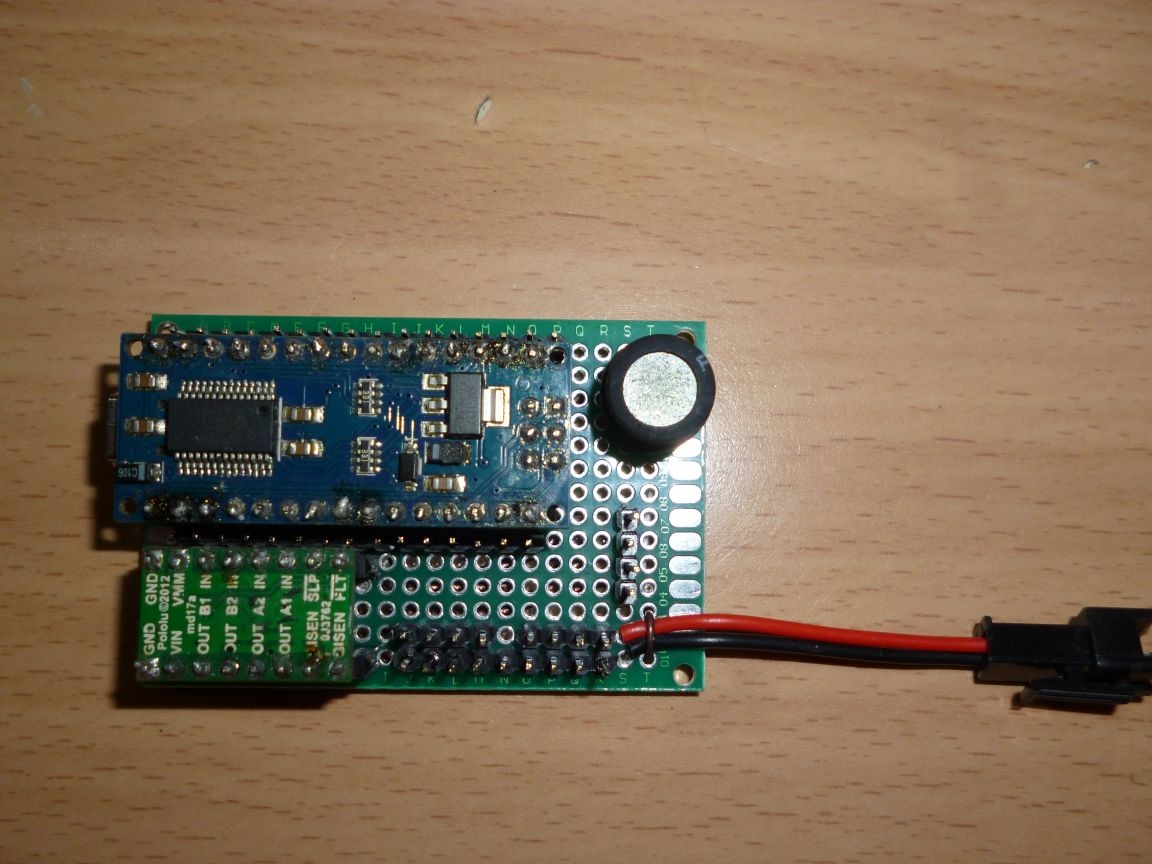
Mēs instalējam Arduino Nano un DRV 8833 savās vietās:
Un ielieciet dēli uz šasijas:
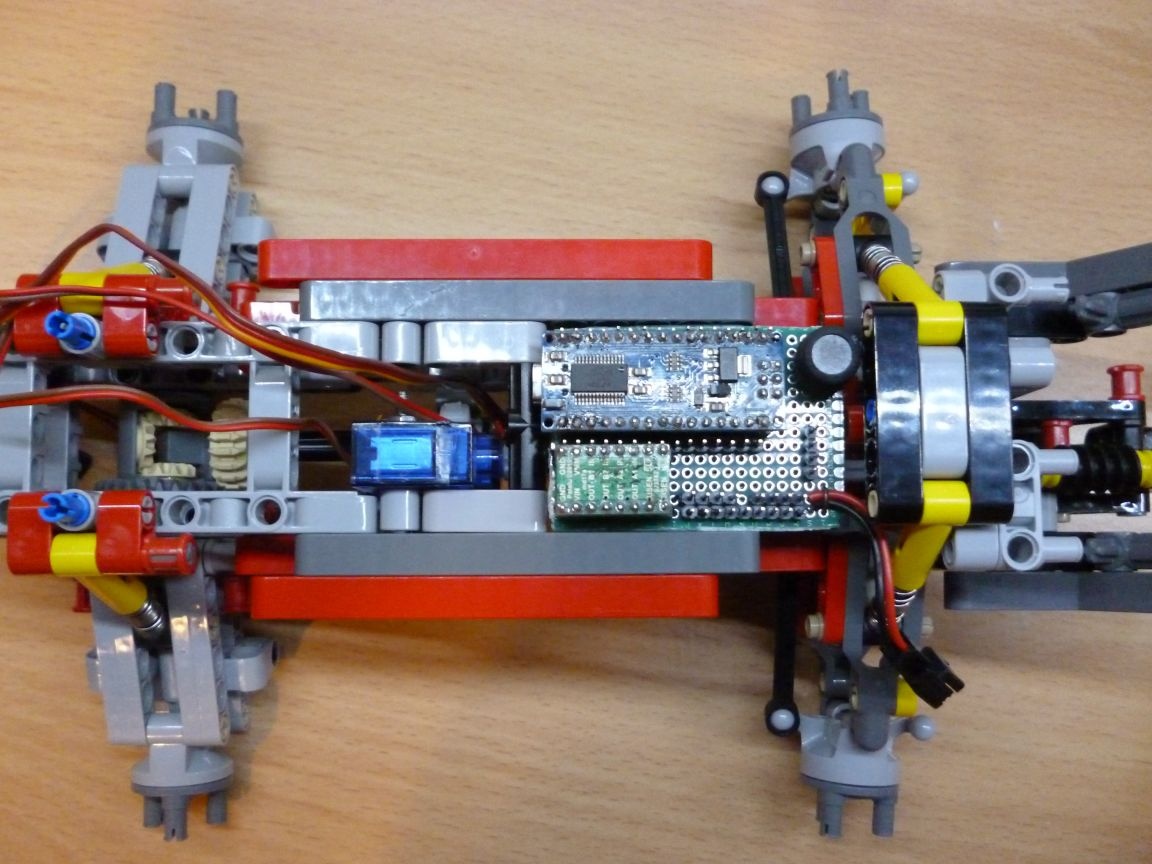
Barošanas avots - 6 Ni-Mn 1.2v 1000mA baterijas. Ir nepieciešams tos lodēt virknē un vīt tos ar elektrisko lenti. Līme uz abpusējas lentes šasijas aizmugurē.
Mēs savienojam visu mūsu struktūru:
5. solis kajīte
Salons personīgi ir mana improvizācija, nav gatavu instrukciju, tāpēc jāvāc no fotogrāfijām.



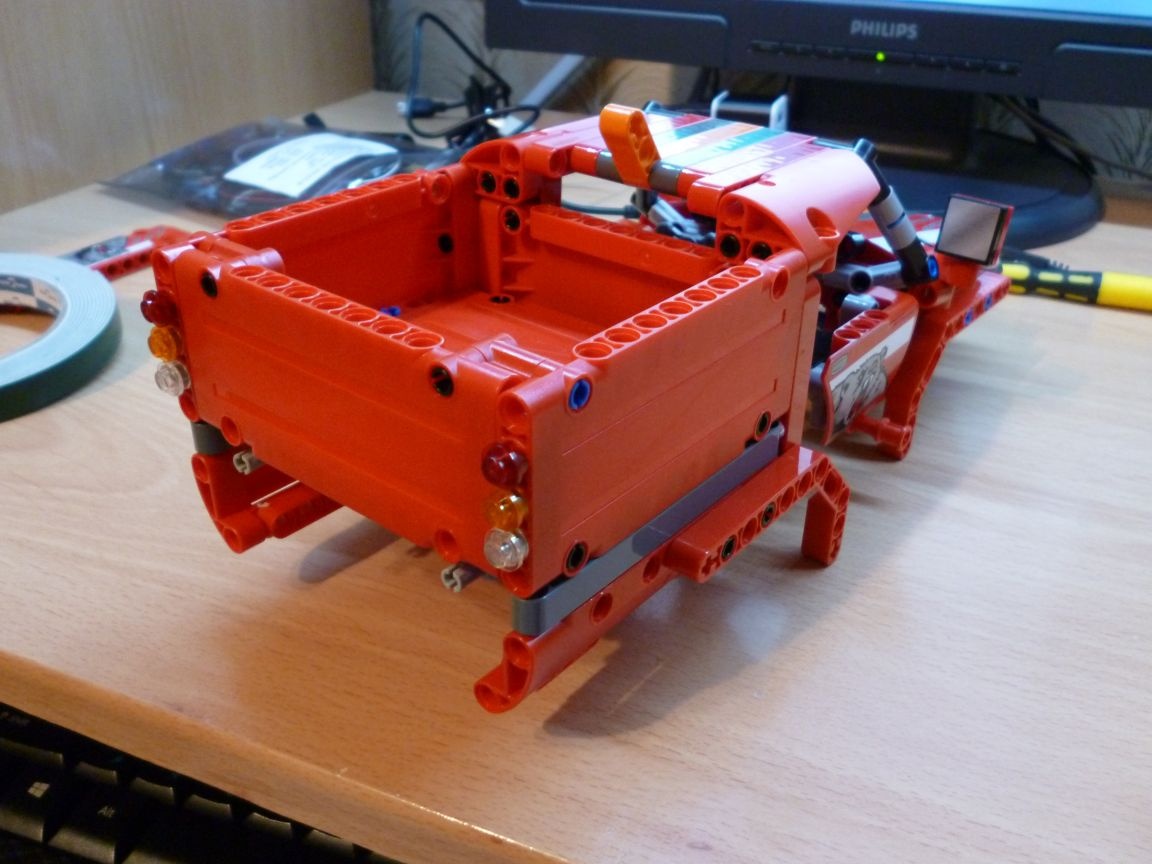
Jūs varat montēt pats savu versiju, jums tas vienkārši jāiekļauj zem šasijas. Galvenais šeit ir saskaņot stiprinājumu ar šasiju. Viņu ir četri, un tie ir skaidri redzami fotoattēlā no kabīnes apakšas.
6. solis - programmaparatūra.
Tomēr šodien, kā vienmēr, es programmēju Arduino IDE. Vispirms jāaizpilda mana programmaparatūra un caur terminālu jāizskatās uz tālvadības pults kodiem, kurus jūs gatavojaties izmantot. Jūs varat ņemt jebkuru IR tālvadības pulti, piemēram, no televizora, DVD atskaņotāja vai arī samontēt savu (man ir pašdarināts tālvadības pults no Sega kursorsviras). Nospiežot pogu, terminālī mēs redzēsim nospiestas pogas kodu, uzrakstīsim to uz papīra lapas. Mēs to darām ar visām pogām, ar kurām mēs vēlamies ieprogrammēt darbības. Pēc tam rediģējiet skici. Mēs pierakstām tajā savus kodus nepieciešamajām darbībām un atkal to mirgojam. Šī programmaparatūra ir konfigurēta mana Sega kursorsviru tālvadības pultī. Spēlējot ar mašīnu, es pamanīju dažas nianses vai neērtības. Kustības laikā ir grūti panākt uzticamu IR komandu uztveršanu. Un tas notiek šādi: nospiediet bultiņu uz priekšu, mašīna saņēma komandu iet, un steidzās uz priekšu, atbrīvoja bultu, bet tā nesaņēma apturēšanas komandu, un turpina braukt, līdz tā avarē vai iestrēgst, tā ir pilna ar sadalījumiem. Daļēji šo problēmu var atrisināt, palielinot komandas nosūtīšanas atkārtojumu skaitu, tomēr tas ir iespējams tikai tad, ja pats izmantojat tālvadības pulti. Bet es izvēlēšos kardinālāku risinājumu - es pāriet uz 433MHz raidītāja - uztvērēja izmantošanu. Par to rakstīšu nākamajā rakstā.
7. solis likts uz riteņiem.
Tātad, mums vienkārši jānovieto kabīne uz šasijas, jāpieliek riteņi un jāpārbauda mūsu SUV darbība.

