Izglītības laikā autore spēlēja spēles ar akselerometra atbalstu pa tālruni. Viņam ļoti patika vadīt automašīnu pa tālruni, vienkārši noliecot, un tad viņš sāka sapņot padarīt automašīnu ar tādu pašu vadību reālajā dzīvē. Tagad kam Arduino un ieguvis programmēšanas prasmes, ir pienācis laiks izveidot pārvaldītu mašīnu Android, viņš to sauca par Hercules.
Viņa saņēma šo vārdu milzīgā griezes momenta un lielā ātruma dēļ. Modelis var kontrolēt, izmantojot Android tālruni, izmantojot Bluetooth. Jebkurš tālrunis ar šo operētājsistēmu ir piemērots kontrolei, autors neierobežo vienu tālvadības pulti. Arī, izmantojot tālruni, tika ietaupīta nauda, jo man nevajadzēja tērēt naudu tālvadības pults izveidošanai.
Materiāli un instrumenti:
- Arduino Uno
- Bluetooth uztvērējs
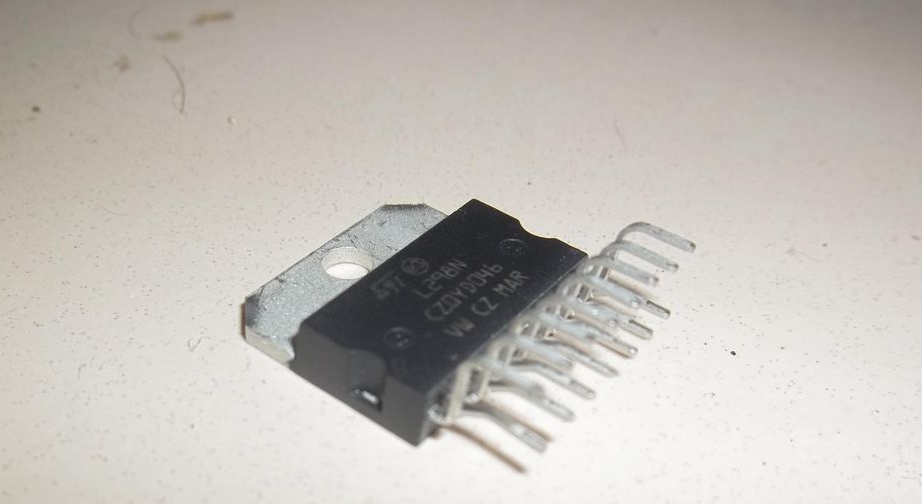
- divu motoru vadītājs (ar L298 H-tiltu)
- Motori ar pārnesumiem 4 gab. (Jauda tiek izvēlēta atkarībā no mašīnas pielietojuma)
- Riteņi 4 gab
- Akumulators 1Ah SLA 12V
- detaļu pamatne (šasija)
- maizes dēlis
- kārbas mājoklim 4 gab
- SPST slēdzis
- Arduino savienojošie vadi
- lodēšanas vadi
- maza izmēra uzgriežņi un skrūves
- rezistors 10 kOhm 1 gab
- rezistors 20 kOhm 1 gab
- Android tālrunis
- lodāmurs
- lodēt
- lodēt pastas
- urbis





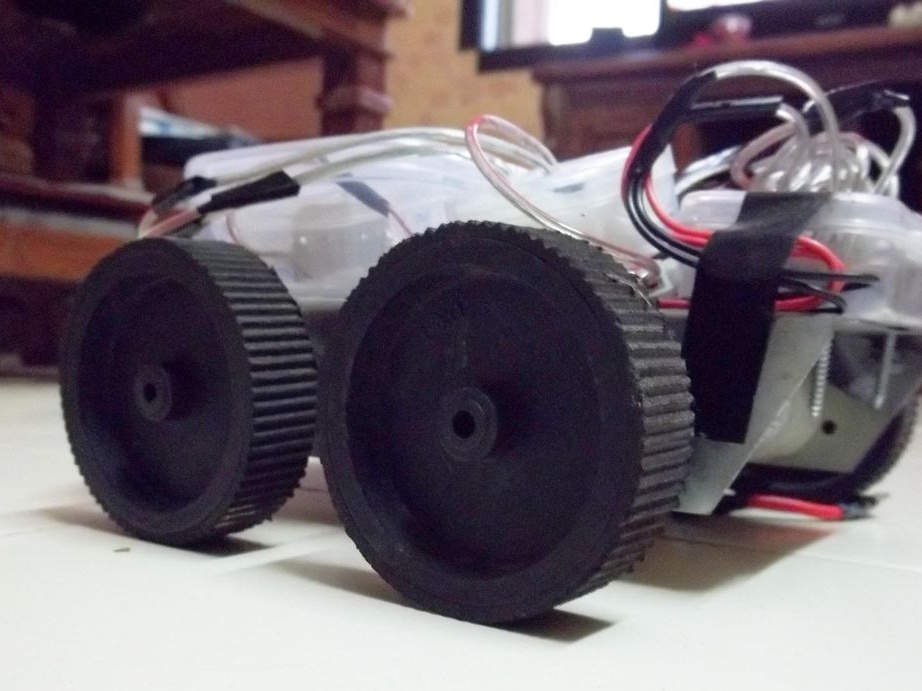
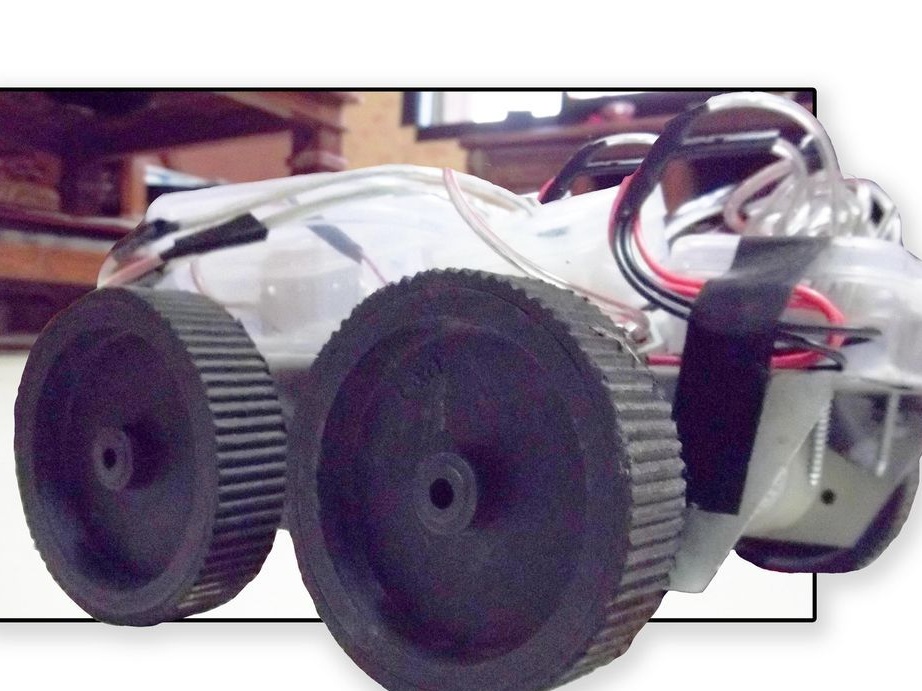
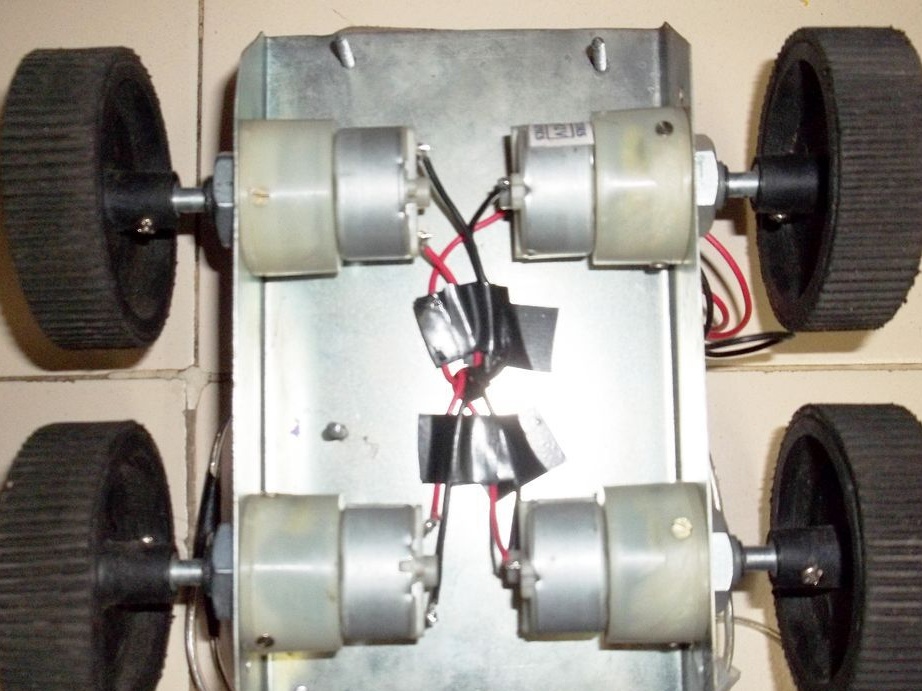
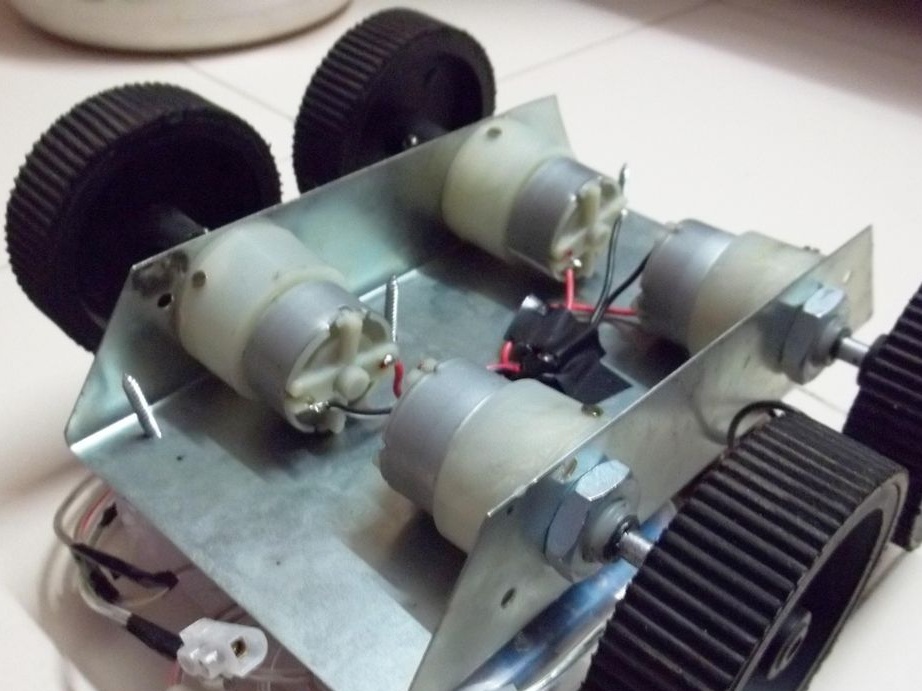
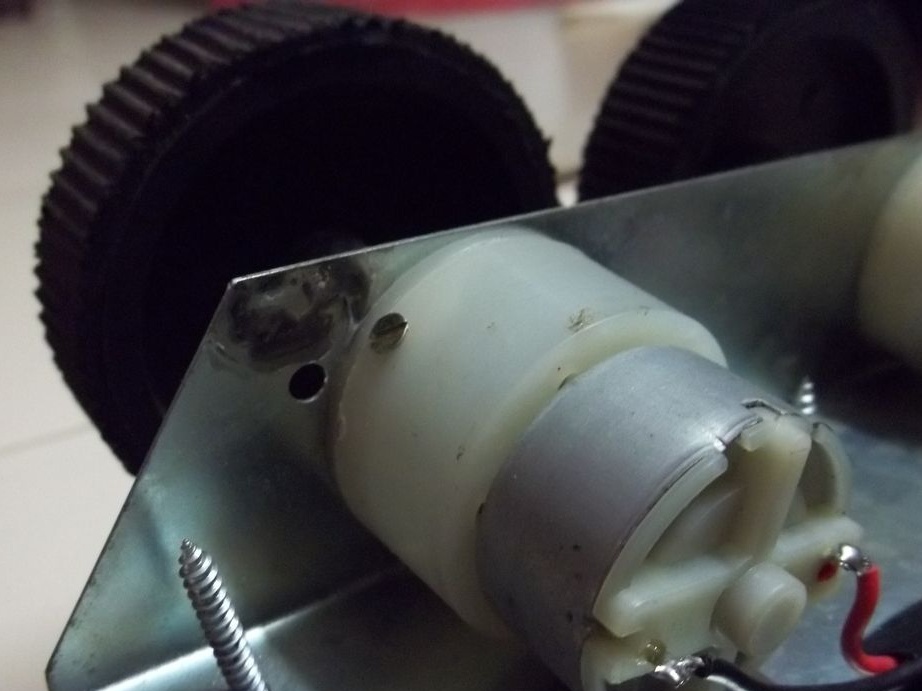
Pirmais solis. Riteņi un šasija.
Motora skrūves ļāva tos viegli uzstādīt uz šasijas, izmantojot uzgriežņus. Riteņi ir uzstādīti līdz motora vārpstai. Divi labie motori tiek ieslēgti paralēli viens otram, kā arī divi kreisie. Kā šasija izskatās pēc četru riteņu un motoru uzstādīšanas, to var redzēt zemāk esošajā fotoattēlā.
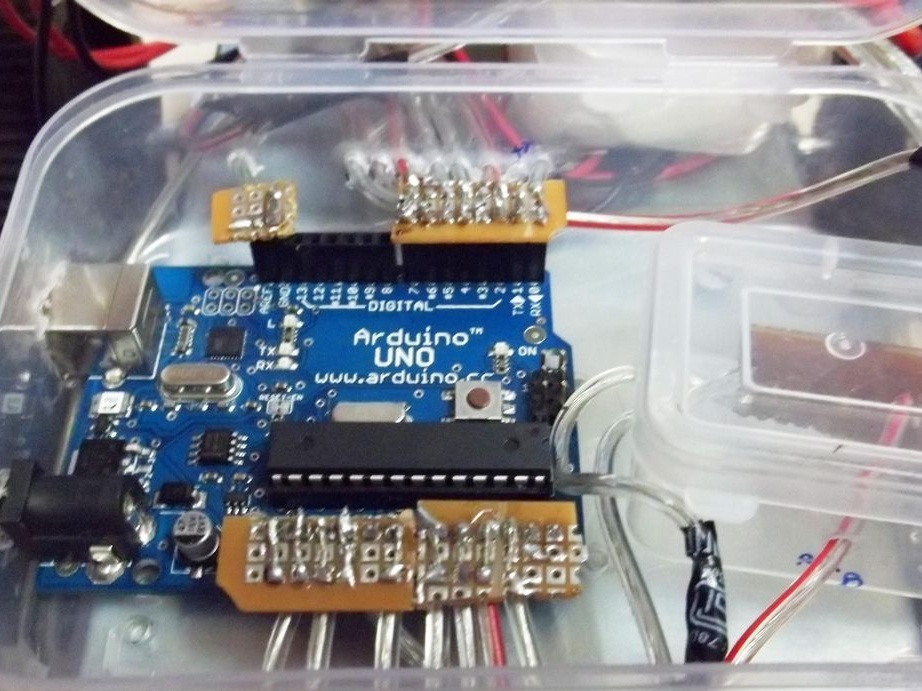
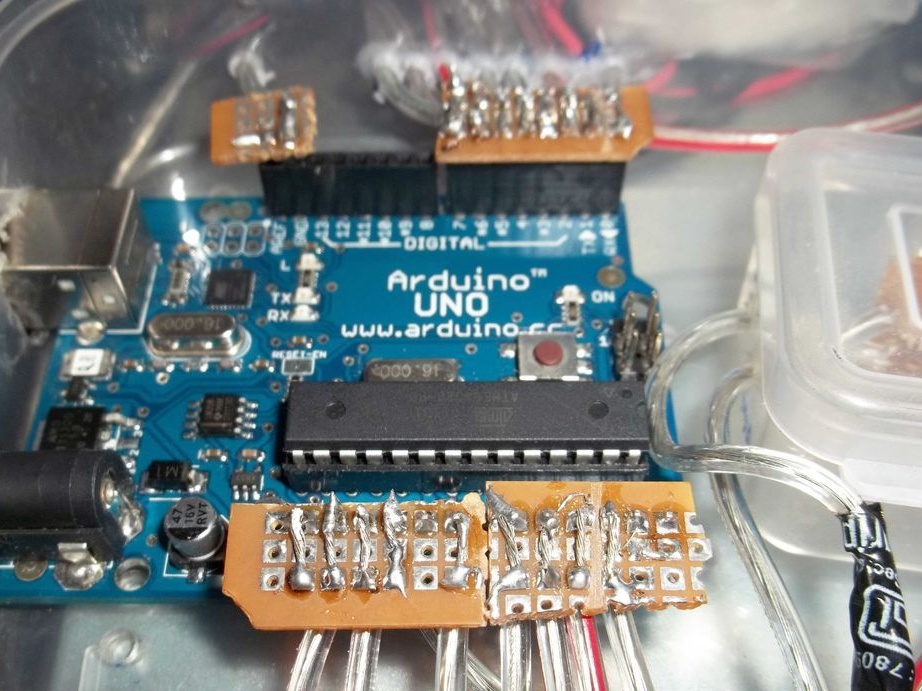
Otrais solis Mājoklis uzņēmumam Arduino.
Arduino gadījuma diagramma ir sadalīta vairākās daļās. Šāds modulāra dizaina risinājums nākotnē palīdzēs atbalstīt ķēdi vai novērst iespējamu nepareizu darbību. Ja kāds no komponentiem sabojājas vai izdeg, tad to var ātri nomainīt, neizjaucot konstrukciju. Kaste Arduino tika izveidota šādi:
- No maizes dēļa tika sagrieztas četras daļas, divas no tām ar caurumiem izmēros 8x3, otrās divas daļas 6x3.
- BLS tapas tika pielodētas katram dēlim garā pusē.
- Katrs šķipsniņš uz maizes dēļa tika papildus pielodēts ar aptuveni 10 cm gariem vadiem, un tas tika darīts tā, lai vadi nenonāktu no Arduino, jo tagad kravas sāka vienmērīgi sadalīties.
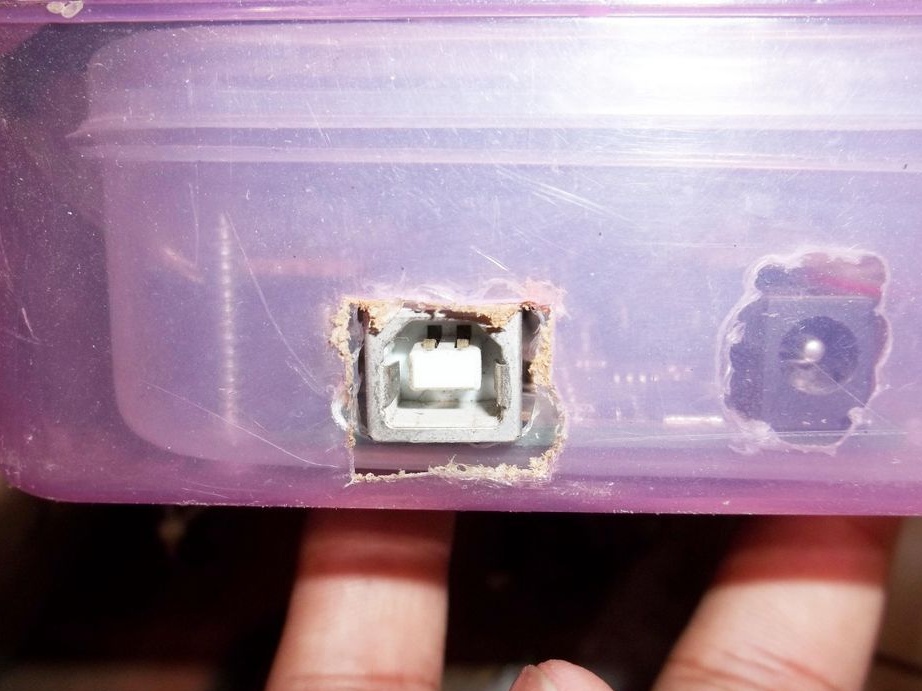
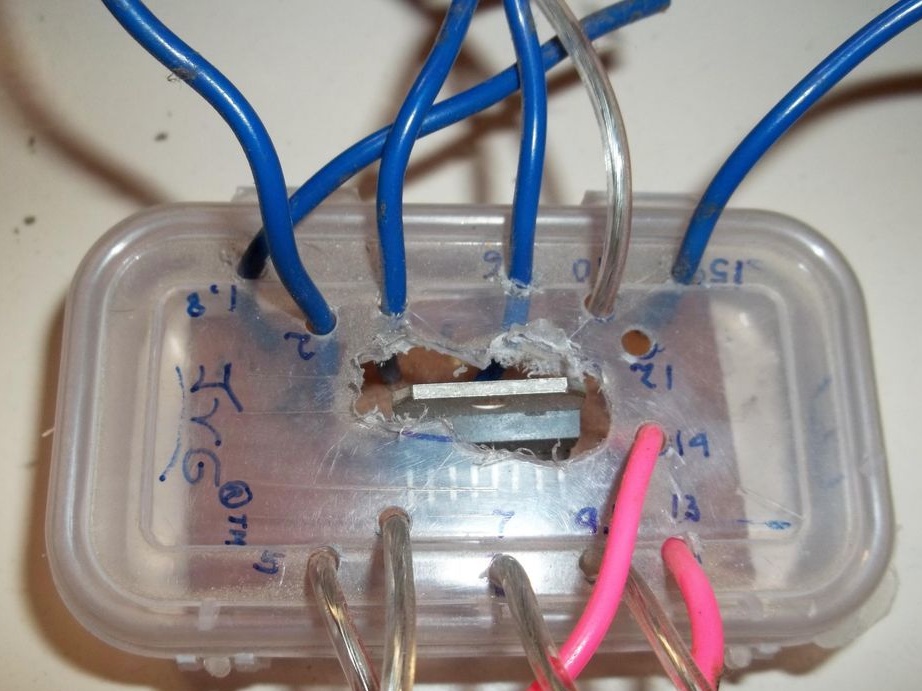
- Tālāk Arduino dēlis tika ievietots korpusā tā, lai USB izeja pieskārās sienai. Šai izvadei tika izgriezts caurums, tas palīdzēs mašīnā ielādēt papildu programmas vai veikt labojumus esošajās. Kastes sānos tika izgriezti caurumi vadiem, kas iet no dēļa. Kastes apakšā, zem Arduino stiprinājuma savienotājiem, tika izgriezti papildu caurumi.


Trešais solis Bluetooth uztvērējs.
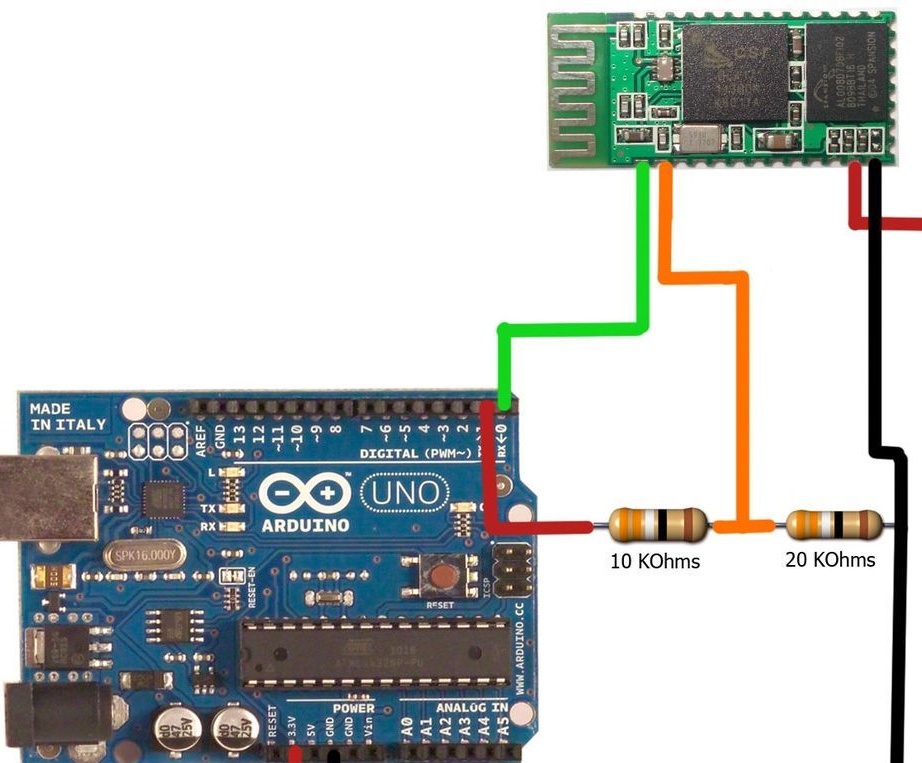
Vadu lodēšana pie Bluetooth uztvērēja ir visgrūtākais uzdevums šī projekta montāžā. Autorei lodējot patiešām trūka trešās puses. Tika izmantoti četri 10 cm gari vadītāji, tie tika pielodēti līdz tapām 1 (Tx), 2 (Rx), 12 (+ 3,3B) un 13 (GND). Tagad raiduztvērēju varēja ievietot korpusā ar iepriekš sagatavotiem caurumiem vadiem. Autore līmēja vadus pie kastes, lai stieples nenokristu no kontaktiem.



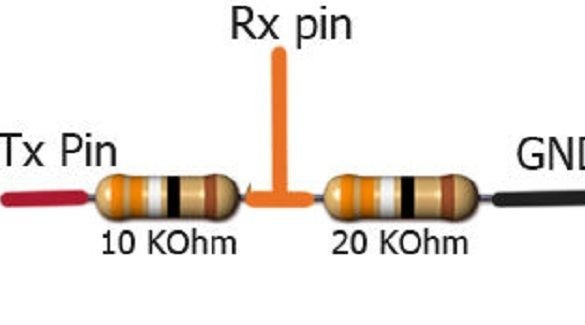
Ceturtais solis. Korpuss rezistoriem.
Sakarā ar to, ka Arduino Tx izeja sūta signālu ar 5 V spriegumu, un Bluetooth modulis darbojas ar spriegumu 3,3 V, bija nepieciešams pārveidot 5 V uz 3,3 V. Šim uzdevumam autore izmantoja sprieguma dalītāju. Saskaņā ar zemāk sniegto shēmu viņš pielodēja rezistoru atlikušajam maizes paneļa gabalam. Protams, šo ķēdi bija iespējams ievietot Arduino lietā, taču nepietika vietas, tāpēc autors rezistoriem izgatavoja atsevišķu.


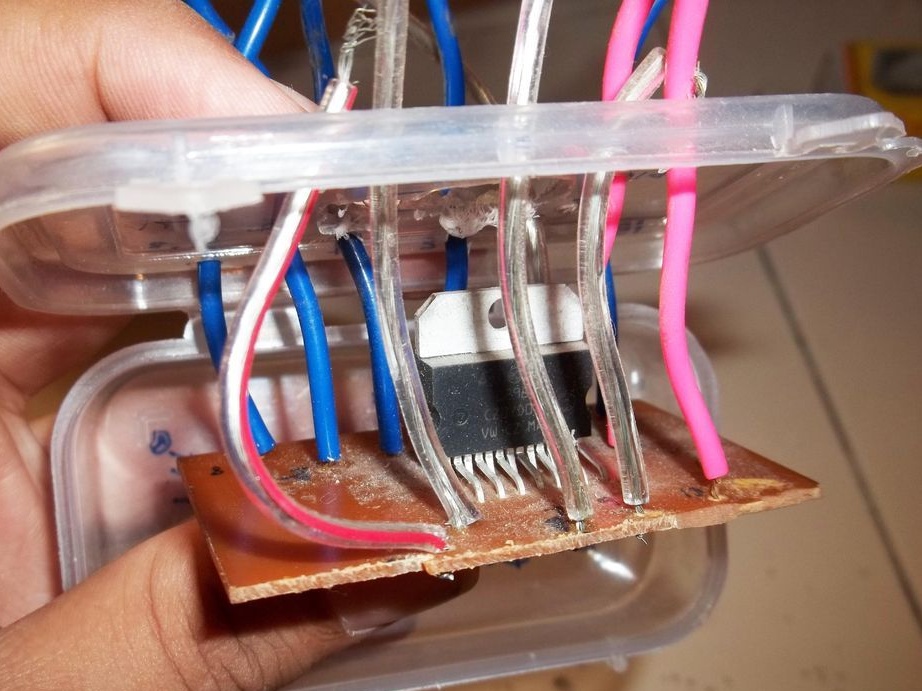
Piektais solis Motora vadītājs.
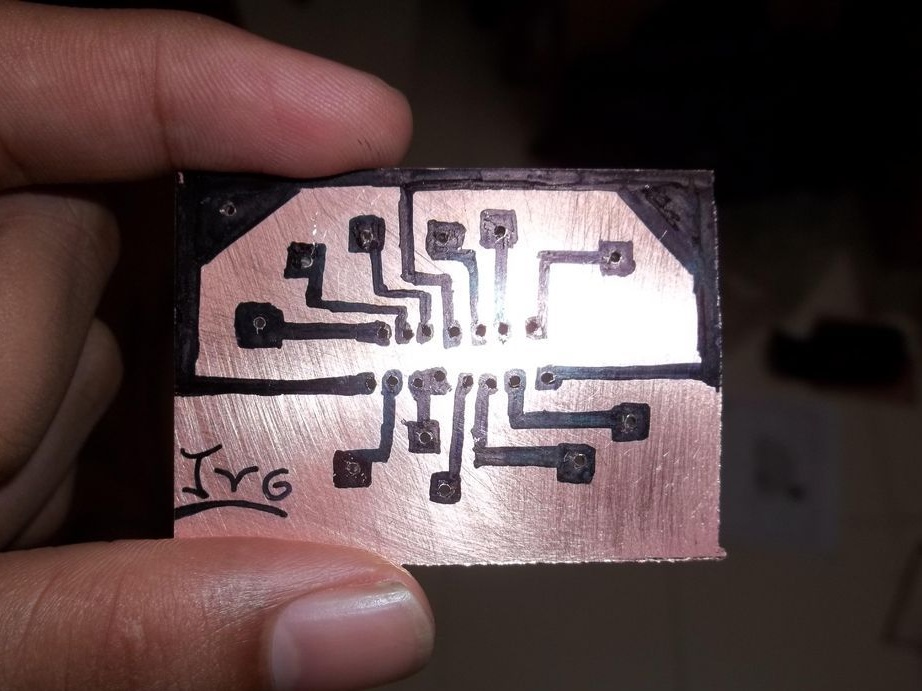
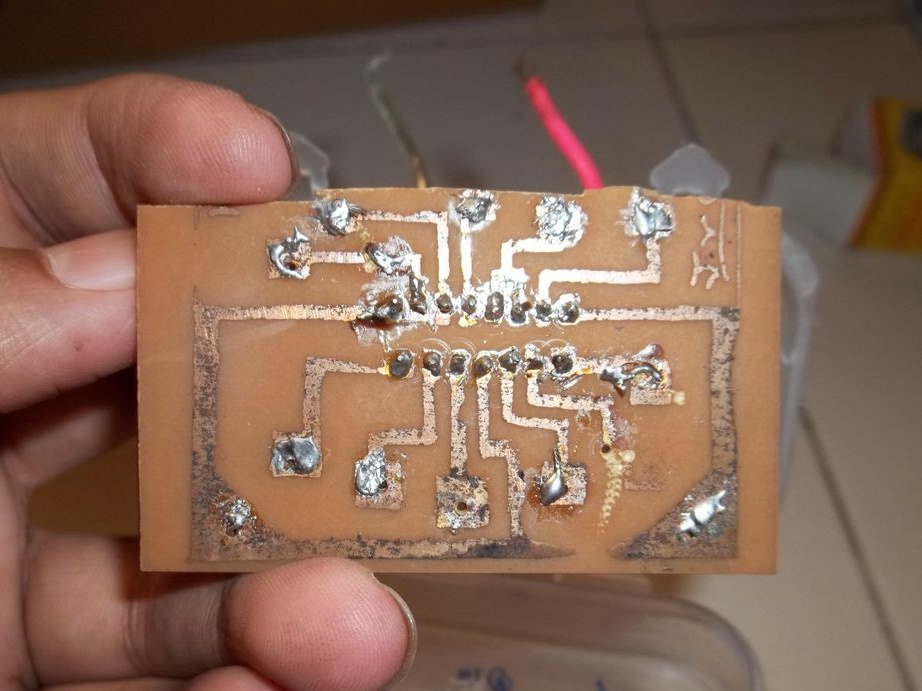
Autors izmanto divkāršu vadītāju ar H-bridge L298 IC, viņš kontrolē četrus motorus. Viņam autors izveidoja dēli, lai atvieglotu vadu lodēšanu pie viņa, pats dēlis zemāk esošajā fotoattēlā. Pēc lodēšanas vadītājs arī tika ievietots atsevišķā apvalkā ar caurumiem vadiem.
Sestais solis Noslēguma montāža.
Katrs atsevišķais komponents ir savienots ar Arduino saskaņā ar shēmu.
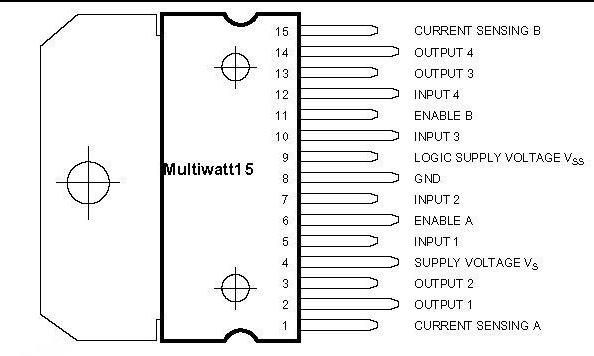
Motora vadītāja savienošana ar Arduino notika saskaņā ar šo norādi:
1 līdz GND
2 līdz pirmajam kreiso motoru kontaktam
3 līdz kreiso motoru otrajam kontaktam
4 līdz 12 V akumulatoram
5 piespraust Arduino 2
6 līdz Tapai Arduino 3
7 piespraust Arduino 4
8 līdz GND
9 līdz 5 V ar Arduino
10 piespraust Arduino 5
11 piespraust Arduino 6
12 līdz pin Arduino 7
13 līdz pirmajam labo motoru kontaktam
14 līdz labo motoru otrajam kontaktam
15 uz GND
12 V barošana tika pievienota Vin Arduino pin un L298 4. tapa. GND Arduino attiecīgi GND barošanas avotam.
Septītais solis. Programma Arduino.
Lai programma darbotos pareizi, bija jāinstalē Amarino bibliotēka, kuru var lejupielādēt. Arduino avota kodu varat lejupielādēt zem raksta.
Astotais solis. Programmatūra Android
Amarino bibliotēka ir instrumentu komplekts darbam ar Android viedtālruņiem. Instalējot tālrunī papildu lietojumprogrammu, jūs varētu sākt rakstīt programmu.
Amarino lietotni un spraudni var lejupielādēt no. Pēc to instalēšanas tālrunī atlika tikai ieslēgt mašīnu un izveidot savienojumu ar to un atlasīt sadaļu Pievienot notikumus-> Akselerometra sensors.
Video ar Amarino un tā spraudņu instalēšanu:
Mašīnas ātrums ir vienāds ar tālruņa slīpumu. Ja mašīna pārvietojas nepareizā virzienā, jums jāmaina vadi no motoriem.