
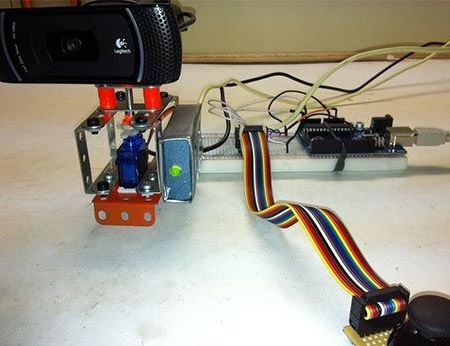
Šajā rakstā tiks runāts par to, kā lietot Arduino var kontrolēt tīmekļa kameru. Precīzāk, vadība būs servo piedziņa, kas ir uzstādīta rāmī no dizainera puses, kurai webcam jau tiks uzstādīts.
Materiāli, ko autors izmanto šīs ierīces izveidošanai:
1) metāla konstruktors
2) aukstā metināšana
3) tīmekļa kamera
4) servo
5) gaismas diodes
6) Arduino
8) kursorsviru no PS3
Sīkāk apsveriet kameras vadīšanas ierīces izveidošanas dizainu un galvenos punktus.
Neizpratnē ir jautājums par to, kā papildus standarta funkcijām, piemēram, bākugunīm, izmantot tik ērtu Arduino platformu. Reiz, izmantojot sarunu caur Skype ar darba kolēģi, autore nāca klajā ar interesantu ideju. Kā būtu, ja jūs dotu viņa kolēģiem iespēju kontrolēt tīmekļa kameru un skatīties, kas notiek birojā. Ne ātrāk kā pateikts, nekā izdarīts, un autore sāka darbu pie šīs idejas ieviešanas.
Sākotnēji autore pētīja galvenos rakstu materiālus, kur ar kursorsviru izmantoja Arduino platformā izveidoto vienību vadību. Saprotot šo rakstu materiālu, autors saprata, ka viņš varēja izmantot veco PS3 kursorsviru, lai kontrolētu servo kustības no viņa.
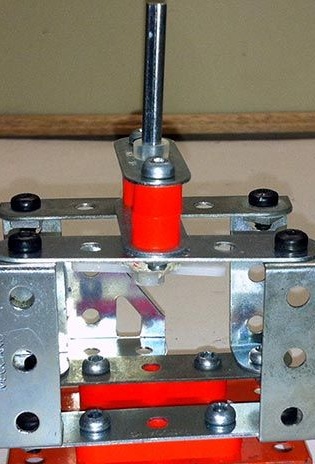
Sākot būvēt, autore nolēma uzbūvēt rāmi, kurā tiks ievietots servo piedziņa un pati kamera. Lai nesarežģītu uzdevumu, autore nolēma izmantot parasto metāla konstruktoru, kuru viņš iegādājās taupības veikalā.
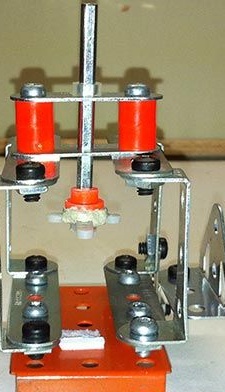
Ņemot vērā šī konstruktora informāciju, izrādījās, ka tika izveidots šāds nākotnes ierīces rāmis:
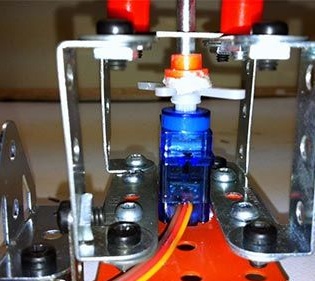
Rāmja iekšpusē tika uzstādīts servo piedziņa. Kā redzams no fotoattēla, tas lieliski iederas izveidotajā rāmī. Lai piestiprinātu servo uz rāmja, autors izmantoja abpusēju lenti. Izmantojot auksto metināšanu, servovārpsta tika savienota ar pārnesumu, kas ar kameru kontrolē platformas kustību.
Ir svarīgi nodrošināt, lai transmisijas dizains būtu izgatavots pat tā, lai nebūtu nevajadzīgas slodzes.
Tad autore sāka instalēt tīmekļa kameru. Tika izmantota Logitech kamera, kas tiek izmantota uzņēmuma birojā, kurā strādā autors. Tāpēc, ņemot vērā faktu, ka kamera nepieder autoram, viņš to neizjauca un nenoņēma pretsvaru, lai gan tas vienkāršotu nākotnes ierīces dizainu.

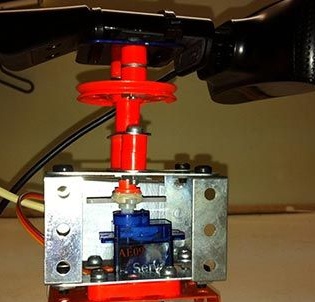
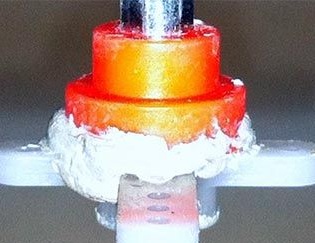
Lai kaut kā kompensētu kameras svaru un sadalītu to struktūras centrā, autore izmantoja 2 biezas blīves. Tie ļauj novirzīt kameras svaru no servo vārpstas uz galveno rāmi, kā arī ļauj izvairīties no vārpstas spiediena uz pašu kameru.
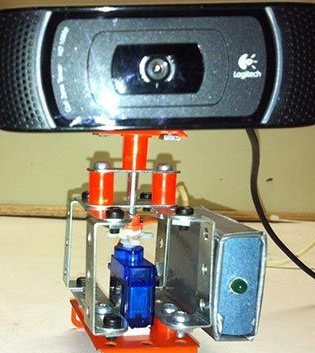
Kamera ir uzstādīta uz īpašas apaļas platformas, kuras pamatā ir ass, kas nāk no servo piedziņas. Tādā veidā kameras vadība tiek realizēta, izmantojot šķērspārraidi.
Pēc tam, kad būves mehāniskā daļa bija gatava, autore to uzņēma e pildīšana.
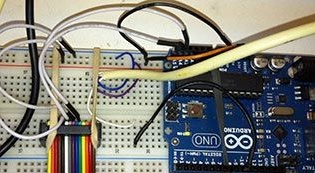
Sākumā viņš nolēma savienot servos un gaismas diodes, kas parādīs sistēmas statusu.
Pati servo ir 3 vadi: -GND, + 5 V un Signal. Autors izmantoja 9 tapas, lai realizētu spēju vadīt piedziņu. Lai izveidotu piedziņas iespējotības indikatoru, autore uzstādīja diodi, kas ir savienota ar diviem vadiem: + 5V un GND ar rezistoru uz + 5V līnijas.

Pēc tam, pamatojoties uz rakstiem internetā, autore no PS3 sagatavoja salauztu kursorsviru, lai kontrolētu disku.

Pēc tam autors izvēlējās programmu Arduino, pateicoties kurai servo vadībai kļūst iespējams izmantot kursorsviru un USB portu. Lai sazinātos ar USB portu, autors izmantoja modema vadību un lietojumprogrammu termināla emulatoru, piemēram, Minicom vai Putty.
Šī programma nodrošina vairākas kameras vadības funkcijas.
Lai kameru uzstādītu centrā 90 grādu leņķī, jums jānospiež "m", kamera arī automātiski nonāk šajā stāvoklī, kad tiek ieslēgta servo. Lai pagrieztu kameru pa kreisi, ir jānospiež taustiņš "F", un, nospiežot pogu "J", kamera tiek pagriezta pa labi.
Programmu varat lejupielādēt raksta beigās.
Tā kā autore īpaši neizstrādāja kameras pagriešanas ierīces dizainu, tai sāka būt vairāki trūkumi.
Piemēram: tā kā kamera nav fiksēta rāmī, kad tā ir sagāzta, tā var nokrist no platformas; tā kā servo ir diezgan mazs, kameras griezes moments rada papildu griešanos, kas savukārt deformē servo; servo vārpstas caurumi ir pārāk lieli, tāpēc tie nav statiski un ir arī pakļauti stresam.
Tāpēc nākotnē autors vēlas nedaudz uzlabot ierīci šādi: pārliecinieties, vai kameras pagriešanu kontrolē kursorsviras bultiņas, nevis pogas; pagriežoties, atvieglojiet servo slodzi.