
Materiāli un instrumenti:
mikrokontrolleru Arduino (šajā mājās gatavots piemēro Arduino Uno Rev 3);
- divas servolas no Parallax;
- kursorsvira (arī no Parallax);
- shēmas plate) maza);
- savienotāji savienošanai;
- Ierīce servodzinēju kustības izsekošanai (tiek izmantota salauzta tīmekļa kamera un lego klucīši).
Pašdarināts montāžas process:
Pirmais solis. Mēs savienojam servodotorus
Pašmāju montāžas process sākas ar servodzinēju pievienošanu. Iepriekšēja izkārtojuma apkopošanai tiek izmantota shēma. Tad būs iespējams izgatavot atsevišķu vairogu. Attēlā jūs varat redzēt, kā tieši viss ir savienots.
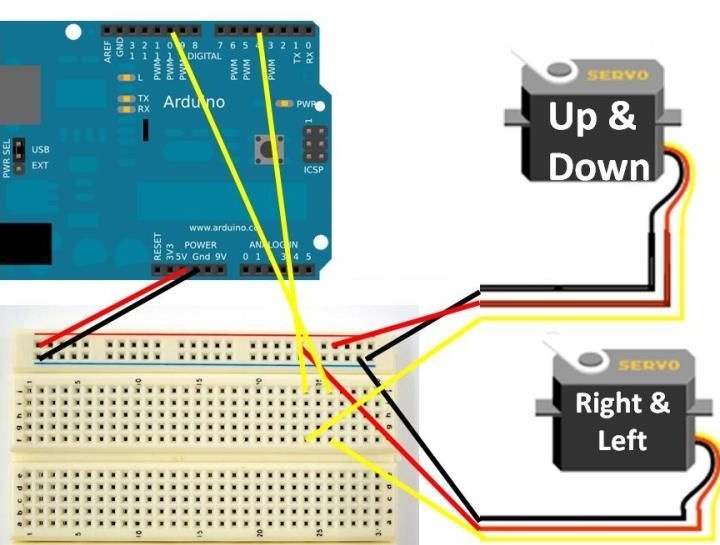
Sarkanajam kabelim ir jauda, tas tiek savienots ar Arduino kontroliera 5 V tapu.
Melnais vads ir mīnuss (iezemēts), tas savienojas ar Arduino izvadi ar nosaukumu GND.
Dzeltenajam kabelim no labā un kreisā servomotora jābūt savienotam ar 11. tapu. Dažos modeļos tas var būt balts.
Līdzīgs dzeltens augšup un lejup kabelis jāpievieno 4. tapai. Dažiem dzinēju modeļiem tas var būt arī balts.
Ir svarīgi atcerēties, ka signāla savienotāji, kurus izmanto motora vadībai, nāk no PWM izejām.
Otrais solis Pievienojiet kursorsviru
Kā kursorsvira ir savienota, var redzēt attēlā. Sākumā shēma var šķist diezgan sarežģīta, bet patiesībā šeit nav nekā sarežģīta. Tāpat kā motoriem, arī šeit tiek izmantota vadu plāksne.
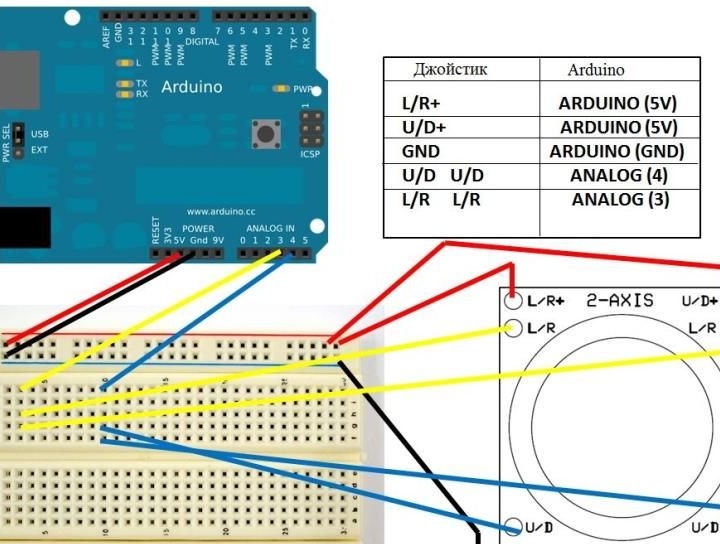
1. Kursorsviras modulī jūs varat atrast izejas U / R + un L / R +. Caur šīm izejām tiek pieslēgta strāva. Attiecīgi jāpieliek + 5 V spriegums no atbilstošās tapas uz Arduino.
2. Zem kursorsviras ir arī divi savienotāji, kurus sauc par L / R, un divi U / D savienotāji. Viņiem jābūt savienotiem ar analogo izvadi A3 un A4.
3. Jāsecina, ka kursorsviras zemei jābūt savienotai ar zemi Arduino.
Pēc montāžas savienojums ir jāpārbauda vēlreiz. Vairumā gadījumu problēmas rodas savienojuma kļūdu dēļ. Tas jo īpaši attiecas uz shēmas plates izmantošanu, un uz tā ir daudz savienojumu.
Trešais solisSkice Arduino
Kods ir ļoti vienkāršs un satur sīkus komentārus. Iepriekš minētais kods vienkārši jākopē Arduino IDE. Kad kods ir ielādēts, dzinējiem nevajadzētu kustēties. Viņiem vajadzētu sākt kustēties tikai tad, kad tiek nospiesta kursorsviras poga.
Problēmas, kas var rasties, un to risināšanas iespējas
1. Ja dzinēji neieslēdzas, vēlreiz pārbaudiet savienojumu. PWM izejas tiek izmantotas motoru savienošanai, un analogās izejas tiek izmantotas kursorsviru savienošanai.
2. Gadās, ka tūlīt pēc koda ielādes dzinēji sāk vibrēt. Tas notiek, ja nepareizi pievienojat tapas U / D + L / R +. Savienojums ir rūpīgi jāpārbauda. Lai testa laikā nededzinātu dēli, tā ir jāatvieno no datora.
3. Ja viss tiek atkārtoti pārbaudīts, bet dzinēji joprojām nevēlas darboties, varat mēģināt no jauna savienot kursorsviru. Tas ir jānoņem no shēmas plates un pēc tam ar zināmu piepūli jāinstalē. Kursorsviru savienotājiem vajadzētu labi iekļauties izkārtojumā.
Ja viss izrādījās, tagad, izmantojot kursorsviru, jūs varat sākt radīt jebkurus mājās gatavotus priekšmetus ar kontroli. Piemēram, jūs varat izgatavot robotu, kuru var vadīt ar kursorsviru, un vēl daudz vairāk.