

Robots DIY būs lieliska rotaļlieta bērniem, arī ar to jūs varat spēlēt radiniekus vai draugus. Robota būtība ir šāda. Tā ir kaste ar slēdzi. Tiklīdz kāds noklikšķina uz slēdža uz kastes, sāk atvērt durvis, no kurām iznāk roka un novieto slēdzi sākotnējā stāvoklī. Neskatoties uz robota ārējo vienkāršību, patiesībā tas viss izskatās diezgan smieklīgi.
Robota izveidošanas pamats ir shēma Arduino. Ir arī daži mehāniskie elementi, kas tiks aplūkoti turpmāk. Sīkāk apsvērsim, kā var dari pats salikt šādu robotu.
Materiāli un instrumenti ražošanai:
- Arduino dēlis, to darīs jebkurš ar PWM izejām;
- servodzinēji, divi gabali (piemēroti modeli Futaba - S3003, šāda motora jauda ir pietiekama, lai atvērtu durvis, ierīce rada jaudu līdz 3,2 kg / cm);
- baterijas;
- slēdža tips SPST vai SPTT;
- slēdzis akumulatora enerģijas kontrolei;
- jums ir nepieciešama poga, lai restartētu Arduino;
- vadi, džemperi un citas mazas lietas.

Turklāt jums papildus būs nepieciešama pārnesumkārba (piemērota radiovadāmām automašīnām), dēlis elektromotoram, ko sauc par Arduino motora vairogu, RC servodzinējs. Šie komponenti ir nepieciešami, lai kaste, tāpat kā autors, varētu kustēties.
Lai samazinātu trokšņa līmeni ierīces darbības laikā, ir nepieciešams elektrolītiska tipa kondensators ar nominālo vērtību 10mF, 10K rezistors un 74HC04 invertors.
Robota ražošanas process:
Pirmais solis. Kā pagatavot kasti
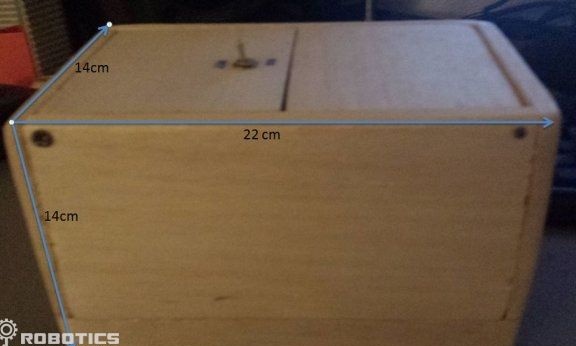
Lai izveidotu lodziņu, tas ir, robota korpusu, jums jāatrod saplāksnis vai korķis. Turklāt koka līmēšanai jums ir nepieciešama jaudīga līme. Ir svarīgi saprast, ka jo vairāk struktūra svērs, jo vairāk enerģijas tiks patērēts. Kastes izmērs ir 22cm x 14cm x 14cm.
Otrais solis Shematiska diagramma e daļas
Robota augšpusē ietilpst Arduino galvenā tāfele, divas servo un slēdzis. Attiecībā uz ķēdi, kas ir atbildīga par trokšņa daudzumu, to var aizstāt ar parastu rezistoru.
Servo piedziņas darbina caur Arduino plates piekto tapu. Runājot par signāla vadiem, tie ir savienoti ar kontaktiem 9 un 10. Pateicoties šiem PWM kontaktiem, tiek kontrolēts servodzinēju rotācijas leņķis. Tas ir leņķis no 0 līdz 180 grādiem.
Sarkanā poga ir nepieciešama, lai restartētu Arduino.
Ķēdes apakšā ir Arduino motora vairogs.Uz tāfeles jūs varat redzēt divus kanālus A un B, pateicoties tiem, ja vēlaties, varat vienlaikus savienot divus motorus. Šīs plates galvenais uzdevums ir tas, ka ar tās palīdzību jūs varat programmatiski iestatīt griešanās ātrumu, virzienu, pārtraukumus jebkuram motoru kanālam. Ja paskatās diagrammu, tiek izmantots kanāls B, savukārt kontakts 13 nosaka virzienu, kontakts 11 ir ātrums, un kontakts 8 tiek izmantots, lai kontrolētu bremzes.
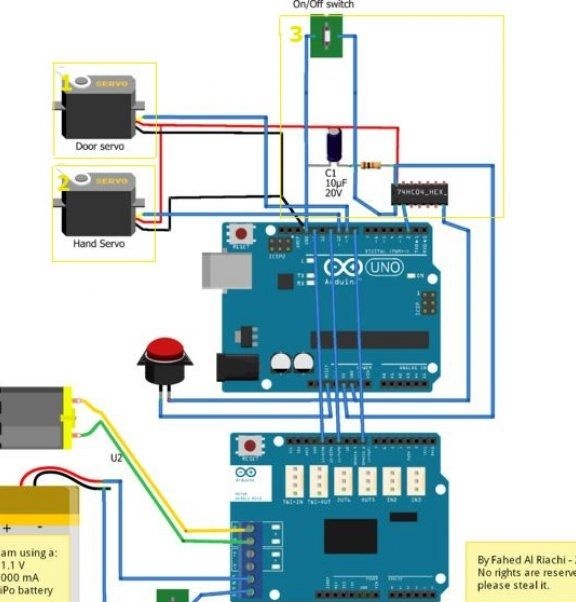
Strāvas avots ir 11,1 / 1000 mA akumulators, tas tiek savienots ar Arduino motora vairoga plāksni. Ja tas netiks izmantots, akumulators ir tieši savienots ar galveno plati.
Trešais solis Dzinēja uzstādīšana
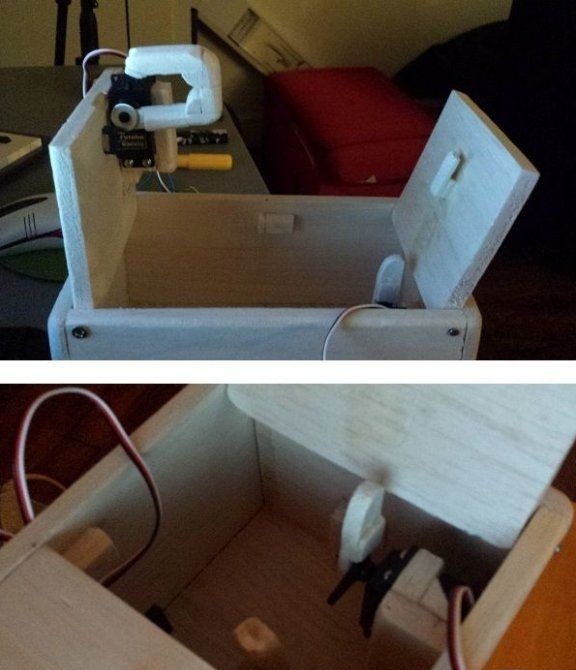
Servo piedziņa un rokas ir uzstādītas eksperimentāli, jums praktiski jāpārbauda, vai mehānika darbojas pareizi. Lai pārbaudītu motoru novirzes rādiusu, varat izmantot Arduino IDE programmu.
Jebkura veida rokas izstrādājumu ražošanai. Galvenais ir tas, ka tas ir viegls, jo pretējā gadījumā palielināsies enerģijas patēriņš. Rokas izmērs tiek uzstādīts uzstādīšanas laikā, izvēloties vēlamo garumu, tiek panākts vēlamais efekts.
Pārsega stūmējs un roka ir uzstādīti tā, lai darbības laikā tie nepieskartos servodzinējam.
Ceturtais solis Mēs savienojam servomotoru un pārslēdzamies uz Arduino
Izmantojot vadus un džemperus, jums ir jāpieslēdz visi elektroniskie elementi viens ar otru saskaņā ar norādīto shēmu. Vadi jānovieto tā, lai tie netraucētu robota kustīgajiem elementiem.
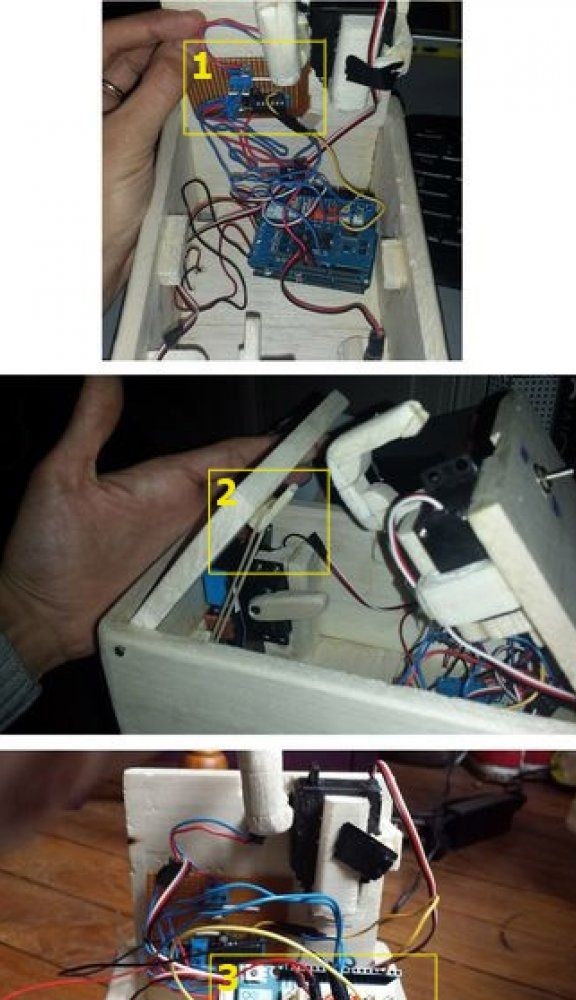
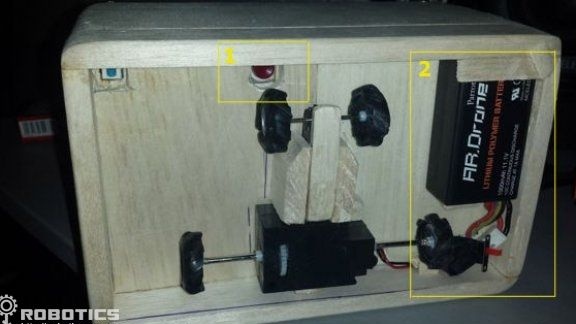
Zem numura 1 jūs varat redzēt, kā tas ir savienots un kur atrodas komutācijas ķēde. Skaitlis 2 apzīmē šādu elementu kā elastīgo joslu, tas ir nepieciešams, lai durvis varētu atvērt ar nelielu spriedzi. Nu, skaitlis 3 norāda motora vairogu, kas uzstādīts uz Arduino.
Piektais solis Mehāniskās daļas uzstādīšana kastes pārvietošanai
Kastes apakšā ir akumulators, motors ar riteņiem, pārnesumkārba, atiestatīšanas poga un pārslēga slēdzis, lai kontrolētu robota jaudu. Pirms elementu piestiprināšanas jums jāaprēķina kastes svara līdzsvars. Lai robots būtu stabils, papildus vadošajai asij ir uzstādīts vēl viens.
Sestais solis Vēl viena papildu funkcija
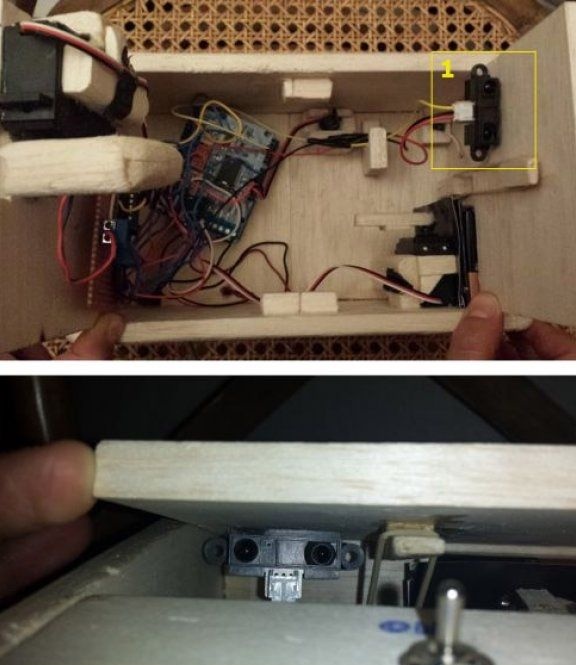
Lai robots varētu noteikt kustības virzienu, to var aprīkot ar IR sensoru. Tajā pašā laikā, kad kāds mēģina pieskarties pārslēgšanas slēdzim, kaste pārvietosies pa labi un pa kreisi. Šiem nolūkiem ir piemērots sensors GP2Y0A21, tam ir trīs vadi. Dzeltenai jābūt savienotai ar Arduino trešo tapu, sarkanajai - līdz 5. tapai un ar melnu - zemei.
Tas ir viss, vienkāršs un vienlaikus smieklīgs robots ir gatavs. Šāda rotaļlieta sagādās prieku ne tikai bērnam, bet arī pārsteigs daudzus pieaugušos.
Programmaparatūra: