

Par pultoīdiem tiek saukti tādi roboti, kurus var vadīt attālināti, izmantojot tālvadības pulti. Piemēram, šajos nolūkos var izmantot TV tālvadības pulti. Galvenais uzdevums, ko autors izvirzīja šāda robota ražošanā, ir tā montāžas vienkāršība. Apsver robots neprasa drukātās shēmas plates ražošanu, uzstādīšana ir ļoti vienkārša un notiek tikai uz kartona.

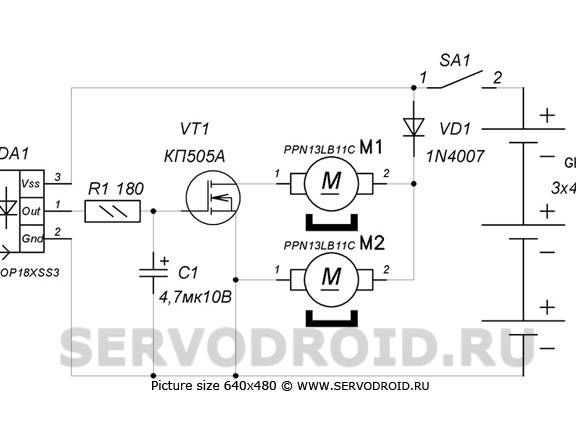
Elektroniska Robota shēma sastāv tikai no četrām sastāvdaļām: diodes, tranzistora, fotodetektora un kondensatora. Mehāniskās daļas ražošanai būs nepieciešami arī minimāli materiāli, piemēram, lietas izgatavošanai tiek izmantots CD-ROM.
Šādi izgatavots robots sapratīs tikai vienu komandu. Ir vērts nospiest jebkuru pogu vadības panelī, un robots sāks griezties. Ja turpināsit turēt pogu, rotācijas leņķis kļūs lielāks, kā rezultātā robots var pagriezties par 360 grādiem.
Robota ierīce
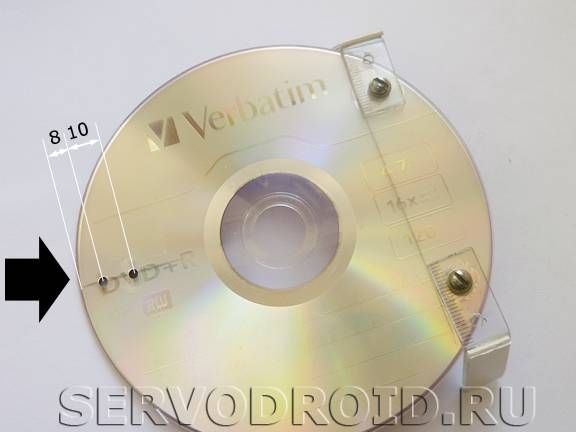
Robota ražošanā par pamatu tiek izmantots kompaktais disks. Runājot par spēka elementiem, tie ir piestiprināti, izmantojot M2 skrūves. Elektroniskā tāfele, arī akumulatora nodalījums, ir piestiprināta, izmantojot lenti.
Tagad par motoriem tie atrodas leņķī, un to vārpstas atrodas pret ceļu. Tādējādi nav nepieciešams atsevišķi ražot riteņus. Bultskrūves tiek piestiprinātas, izmantojot rāmjus, kas izgatavoti no skolas līnijas.
Trīs “mazā pirksta” baterijas baro robotu, tās tiek uzstādītas īpašā gadījumā. Kopumā strāvas padeve rada 4,5 V.
Un, visbeidzot, fotodetektors, šeit tas ir tikai viens, tas ir TSOP tips. Tas saņem modulētus signālus no jebkura tālvadības pults, pateicoties kuram robotu var vadīt.
Materiāli un instrumenti ražošanai:
- neilona saites;
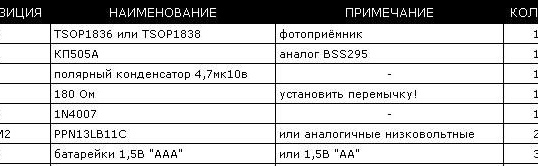
- fotodetektoru tips TSOP1836;
- viena lauka efekta tranzistors (KP505A);
- kompakts disks;
- baterijām ir trīs sekcijas;
- trīs "mazās" baterijas;
- plastmasas lineāls;
- skrūves rāmja piestiprināšanai;
- vadi un slēdzis (pārrobežu tips).
Ražošanas process:
Pirmais solis. PCB dizains
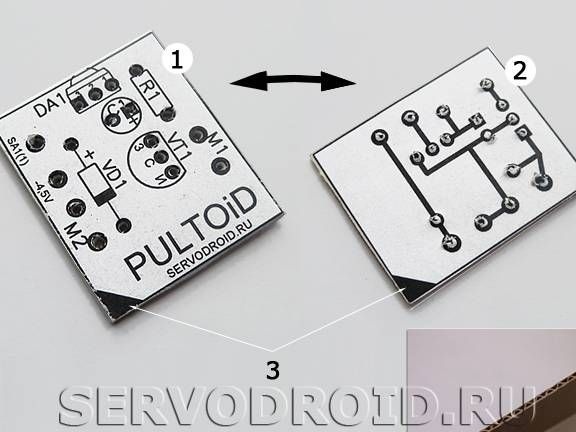
Lai izgatavotu iespiedshēmas plati, vispirms ir jāizdrukā zīmējums uz papīra. Jums vajadzētu iegūt divus attēlus, vienā instalācijas zīmējumā un tāfeles otrā pusē. Kopumā dēlis sastāvēs no trim elementiem, centrā būs gofrēts kartons, kas no abām pusēm pielīmēts ar biroja papīru. Lai salīmētu dēli, ieteicams izmantot sausas līmes nūju.
Otrais solis Radio komponentu uzstādīšana
Uzstādot elektroniskos komponentus, ir svarīgi neaizmirst vai nogriezt kontaktu izvirzītās malas. Pēc tam tie tiks saliekti, un tādējādi tiks izveidota elektriskā ķēde. Visi elementi ir savienoti, lodējot saskaņā ar norādīto shēmu.
Rezistors R1 ķēdē jāaizstāj ar jebkuru džemperi. Fotoattēlā ir parādīts arī pareizs tā savienojuma secība.

Trešais solis Strāvas rāmja uzstādīšana
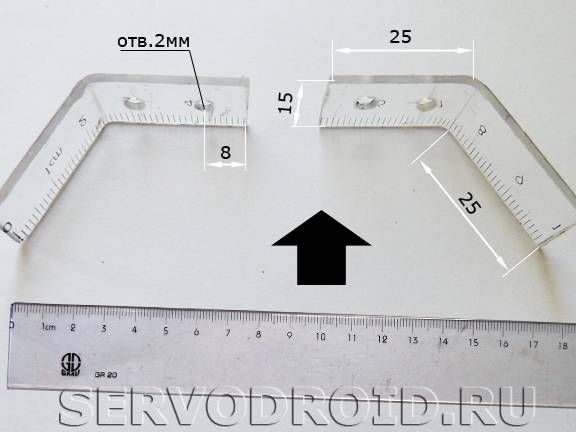
Lai uzstādītu motorus, jums būs jāizveido enerģijas rāmis. Kā materiāls šeit tiks izmantots plastmasas skolas lineāls. Tas jāsagriež divās daļās un saliekts, kā norādīts fotoattēlā. Lai lineāls sāktu liekties, karstā lodāmura gals jānogādā novirzes vietā aptuveni 2 mm attālumā. Arī šajos nolūkos varat izmantot celtniecības fēnu. Lineālam jābūt vienmērīgi saliektam aptuveni 30 grādu leņķī.

Kad rāmis ir izveidots, varat turpināt tā uzstādīšanu. Lai to izdarītu, ņem CD un 2 mm skrūves ar uzgriežņiem. Turklāt pareizajās vietās tiek urbti caurumi, kuru diametrs ir vismaz divi milimetri, un rāmis tiek piestiprināts ar skrūvēm. Lai rāmis neslīdētu, pirms tā uzstādīšanas diskā jāpielīmē abpusēja lente.
Ceturtais solis Priekšējā atbalsta uzstādīšana
Diska priekšpusē jums jāizurbj divi caurumi un jāsagatavo neilona līme. Klona izmēram jābūt 3x150mm. Tas ir jāievieto, kā norādīts fotoattēlā. Tā rezultātā robota darbības laikā iegūtais balsts lieliski nolietojas un slīd pa ceļu.


Piektais solis Dzinēja uzstādīšana
Lai motora vārpstas neslīdētu pa ceļu, tām ir jāpieliek aizsargi. Tie ir izgatavoti no gumijas, ko var atrast uz hēlija pildspalvu pastām. Lai uzstādītu motorus, vispirms jāpielīmē abpusējās lentes gabals pie balsta, tas novērsīs slīdēšanu. Nu, tad motorus beidzot nostiprina ar neilona saitēm.

Sestais solis Slēdzis un barošanas avota savienojums
Kā strāvas avotu varat izmantot jebkuru akumulatoru, kura strāva nepārsniedz 5 voltus. Šajā gadījumā tiek izmantots trīs pirkstu bateriju korpuss, kuru kopējā jauda ir 4.5 V.
Kas attiecas uz slēdzi, tas ir uzstādīts uz pozitīvā kontakta spraugas, kas nāk no enerģijas avota. Sarkanais vads ir piestiprināts pie tāfeles, lai piespraustu SA1 (1), un melnais vads, lai piespraustu -4,5 V.


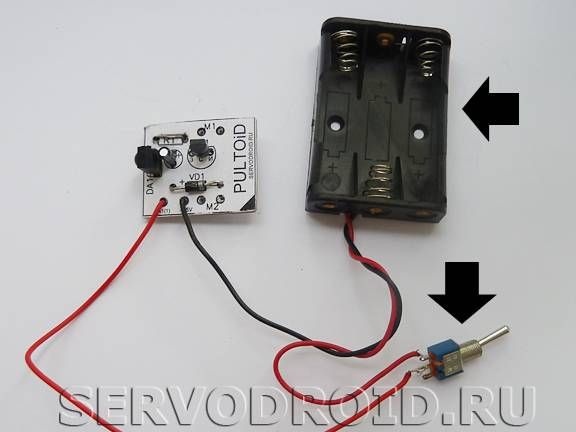
Arī šajā posmā jūs varat savienot motorus, to vadi ir savienoti ar kontaktiem M1 un M2.
Septītais solis. Pēdējais posms
Pēdējā posmā ir jānostiprina visi elektroniskie elementi. Tie ir piestiprināti pie diska, izmantojot abpusēju lenti. Kas attiecas uz slēdzi, tas arī ir jānostiprina, šim nolūkam jūs varat izmantot karstu līmi.

Tas ir viss, tagad robots ir gatavs. Jūs varat mēģināt to ieslēgt un dot komandu pagriešanai, izmantojot jebkuru tālvadības pulti.