

Vibroboti ir tādi robotikas pārvietojas vibrāciju dēļ. Neskatoties uz to, ka viņu dizains ir diezgan vienkāršs, viņi darbā ir ne mazāk iespaidīgi nekā viņu tehniski sarežģītākie brāļi. Šāds robots kā virzītājs izmantos sarus, tas ir sava veida kājas.
Rakstā aprakstītais robots var patstāvīgi mainīt kustības trajektoriju un pats par sevi apiet šķēršļus. Kā eksperimentu autore izveidoja divus robotus, uz kuriem tika uzstādīti dažādi enerģijas avoti un motori. Principā attiecībā uz izmantotajiem materiāliem nav stingru standartu, montējot robotu, galvenais ir ievērot doto shēmu.

Materiāli un instrumenti ražošanai:
- neilona saites 3x150mm izmērā;
- melnas krāsas izolācijas lente;
- 9 voltu akumulators (6F22);
- lāzera disks (CD vai DVD nav atšķirības);
- aizsargājošs apvalks;
- 9 voltu akumulatora savienotājs;
- ekscentrisks (dzēst).

Robota ražošanas process:
Pirmais solis. Izveidojiet robota pamatu
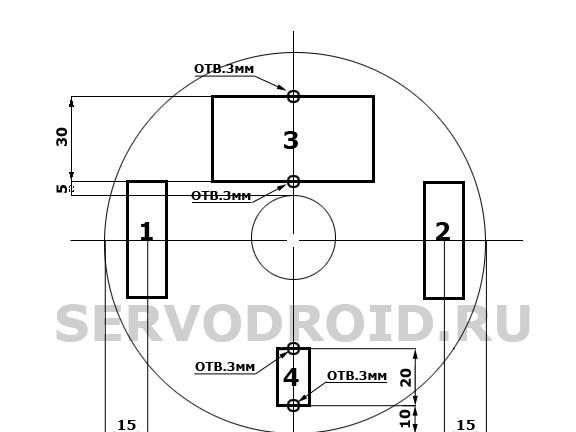
Par pamatu robotam tiks izmantots parasts CD vai DVD disks. Saskaņā ar shēmu, kas parādīta fotoattēlā, skaidri izveidojiet tajā caurumus. Bez izņēmuma visi caurumi tiek urbti ar 3 mm urbi. Šis diametrs ir pilnīgi pietiekams, ja to izmanto neilona saišu piestiprināšanai. Ja jūs nolemjat izmantot citu stiprināšanas metodi, tad caurumus var urbt jebkura cita izmēra. Piedāvātais zīmējums ir piemērots jebkurai robota montāžai.
Cipari 1 un 2 norāda suku uzstādīšanas vietu, kvadrātā ar numuru 3 ir uzstādīts akumulators, bet kvadrātā 4 ir uzstādīts motors.
Otrais solis Mēs izgatavojam un uzstādām iniciatorus
Pateicoties dzinējam, robots pārvietosies. Lai tos padarītu, jums jāņem divas zobu sukas. Vislabāk, ja sukas saru augstumā un formā ir vienādas. Ja forma ir atšķirīga, to var labot ar šķērēm.
Tagad sariem ir jānosaka virziens. Šim nolūkam tiek ņemta līmlente un sarus iesaiņo tāpat, kā norādīts fotoattēlā. Šajā pozīcijā suka jātur apmēram stundu, lai sariņi atcerētos šo pozīciju. Fotoattēlā pelēkā bultiņa norāda saru slīpuma virzienu.

Pēc tam, kad vēlamā forma ir iestatīta, no zobu sukas jums ir jānogriež daļa ar sariem. Tad jums jāņem līmes pistoli un saru uz diska jāinstalē norādītajās vietās. Viss darbs jāveic ātri un precīzi, jo karstā līme ātri atdziest un sacietē.Jums jācenšas uzstādīt sukas tā, lai tās stāvētu paralēli viena otrai.
Birstu sariem jābūt vērstiem atpakaļ, citiem vārdiem sakot, uz akumulatora spriegumu 9 voltu virzienā. Darbības laikā robots pārvietojas pret saru virzienu, tas ir, akumulators būs robota aizmugure.

1 - disks, 2 - karsti kausējama līme, 3 - caurumi motora uzstādīšanai, 4 - caurumi akumulatora uzstādīšanai. Baltas bultiņas norāda saru virzienu.
Trešais solis Padarot ekscentrisku
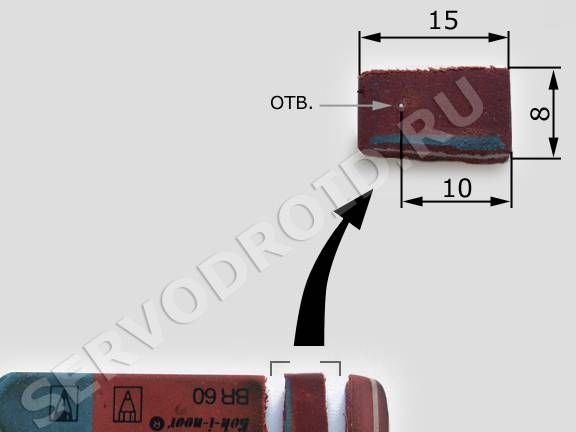
Lai iegūtu vibrācijas, uz motora vārpstas ir jāuzliek ekscentrisks, t.i., nesabalansēts priekšmets. Autore izveidoja dzēšgumijas ekscentriku, nogriežot piemērota izmēra gabalu. Baltajā bultiņā norādītajā vietā izveidojiet caurumu. Tam nevajadzētu būt lielam, jo ekscentris nobīdīsies no motora vārpstas. To var izgatavot ar adatu.
Ceturtais solis Aizsargapvalka izgatavošana.
Tā kā vibrāciju robota darbībai rada rotējošā dzēšgumija, ieteicams šo vietu pasargāt no dažādiem objektiem. Turklāt šāda aizsardzība robotam piešķirs interesantāku izskatu. Aizsargapvalks ir izgatavots no papīra, kas sastāv no vairākiem slāņiem. Balonam jābūt izgatavotam no papīra, tā izmērs ir atkarīgs no motora lieluma. Lai papīrs būtu stingrāks, to var nosmērēt ar līmi un tāpēc uzklāt vēl dažus slāņus. Vai arī šajos nolūkos varat izmantot kartonu.
Lai izveidotu cilindrisku formu, motoru vienkārši iesaiņo ar papīru virsū.




Piektais solis Robota galīgā montāža
Motors tiek uzstādīts noteiktā vietā un pēc tam fiksēts ar neilona klonu. Šādas klijas var iegādāties veikalos, kas specializējas būvmateriālu pārdošanā.
Akumulators ir arī precīzi piestiprināts. Ir svarīgi ņemt vērā, ka akumulatoram jābūt skaidri norādītam centrā, pretējā gadījumā robota trajektorija var mainīties. Starp citu, šādā veidā nākotnē ir iespējams iestatīt kustības trajektoriju mājās gatavots.


Tagad starp klipsavienotāju un motoru jums jāinstalē neliels slēdzis. Noslēgumā atliek pieslēgt klipsavienotāju akumulatoram, un jūs varat sākt pārbaudīt robotu. Vadi ir savienoti pēc krāsas.
Tomēr, lietojot Kron akumulatoru, slēdzis nav jāinstalē, jūs varat ieslēgt robotu, pievienojot savienotāju.
Nu, otrajai robota versijai jūs varat vienkārši noņemt akumulatoru no ierīces, bet, protams, slēdzis ir daudzsološāks.
Tas ir viss, robots ir gatavs, jūs varat sākt testēt. Lai sasniegtu vēlamo rezultātu, varat mēģināt mainīt polaritāti, tāpēc motors rotēs pretējā virzienā, un robots izturēsies atšķirīgi.