
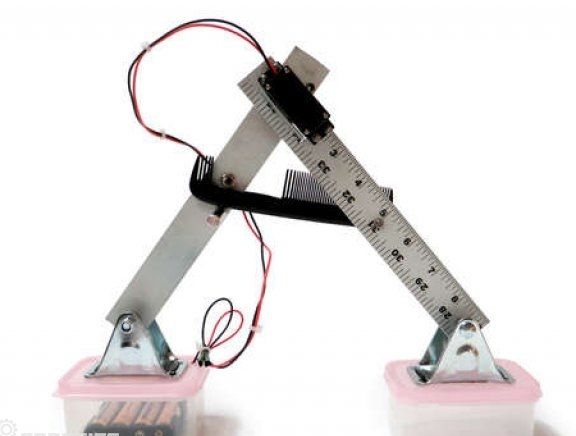
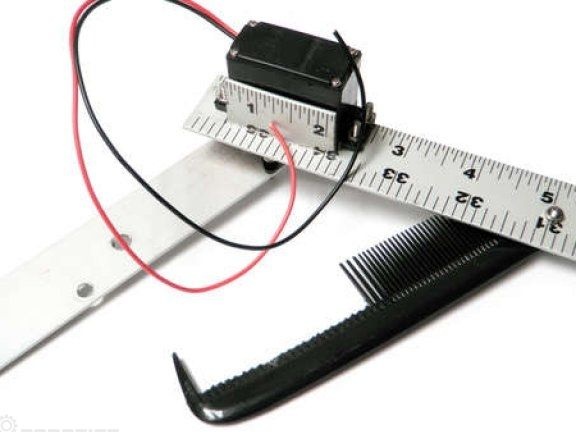
Šāda robota īpatnība ir tā, ka tas ir samontēts no mērīšanas līnijas un sadzīves priekšmetiem. Robots attiecas uz pastaigas veidu. Pēc autora domām, ar visiem nepieciešamajiem instrumentiem un materiāliem šāda robota salikšana prasīs tikai pāris stundas.
Materiāli un instrumenti montāžai:
- servomotors, kas konfigurēts tiešai rotācijai;
- alumīnija lineāli ar izmēru 2 - 18 ";
- divi mazi pārtikas konteineri;
- divi veltņi ar izmēru 2 "- 3";
- viena parasta lodīšu pildspalva;
- viens ķemmīšgliemene;
- desmit mazas skrūves ar uzgriežņiem;
- četras mazas paplāksnes;
- viena metāla pretsvars 2 "- 3";
- četras kniedes;
- viena slēdža tips DPDT;
- AA akumulatora turētājs;
- četras AA baterijas;
- divi dažādu krāsu vadi (melnā un sarkanā);
- elektriskā lente.

Robota ražošanas process:
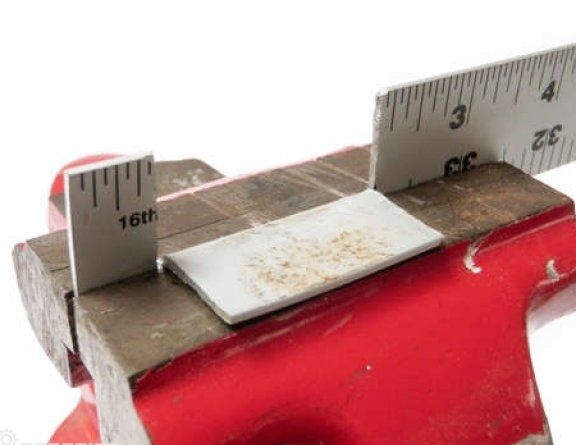
Pirmais solis. Nogrieziet lineālu
Vispirms jums jāuzņem lineāls un jāapgriež ar stenda zāģi. Kopumā jāiegūst divi deviņu collu segmenti.

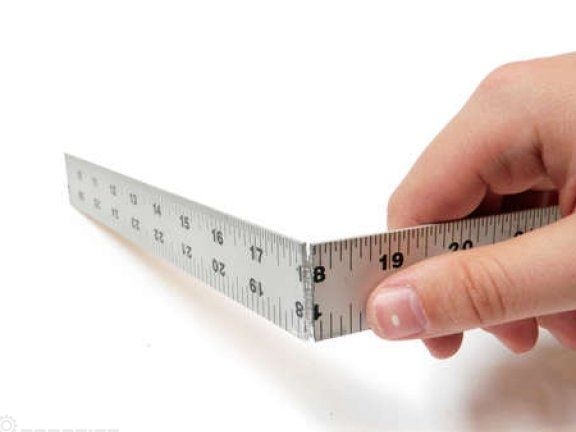


Otrais solis Izveidot atzīmes
Uz viena lineāla gabala jums jāveic divi 3/4 griezumi. No vienas malas tā dziļumam jābūt 1/2 ", bet no otras - 2-1 / 8". Tālāk lineālam jābūt iespīlētam ar vāku un, izmantojot āmuru, lai saliektu sekciju, tas būs pamats motora uzstādīšanai.



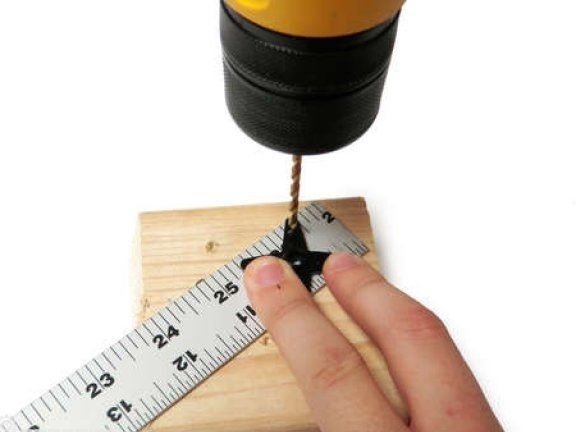
Trešais solis Urbt caurumus
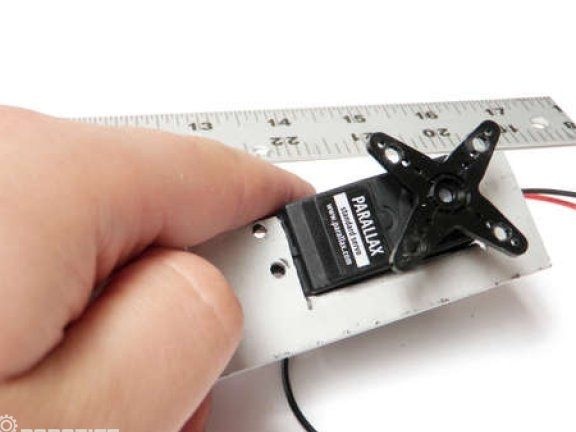
Tagad jums jāņem servomotors un jāpiestiprina vietā, kur tas tiks uzstādīts. Tad ar zīmuli ir jāizdara atzīmes, kur pēc tam jāizurbj caurumi ar diametru 1/8 ".



Tagad jums ir jāizurbj caurums 1/4 ", atkāpjoties no lineāla gala 1/2". Caurums tiek urbts pretējā galā, no kura tiks uzstādīts motors. Tas pats caurums jāizurbj cita lineāla gabala galā.


Tagad jums ir jāizurbj caurumi servo lāpstiņās, šim nolūkam tie ir jānoņem. Kopumā jums ir jāizurbj 4 caurumi, kā norādīts fotoattēlā, ar diametru 1/8 ". Tālāk asmeņi jāpiestiprina pie lineāla malas, atkāpjoties no gala 1/2". Tagad lineālā ir jāizdara līdzīgi četri caurumi.





Visbeidzot, jums ir jāizurbj caurumi 1/8 ", atkāpjoties no 5 motora montāžas vietas. Pie motora stiprinājuma jums arī jāizurbj 3/16 caurumi. Jums arī jāizurbj vēl viens liels caurums, pie kura der servo skrūves. Tas ir viss, visi caurumi struktūras montāžai ir gatavi.
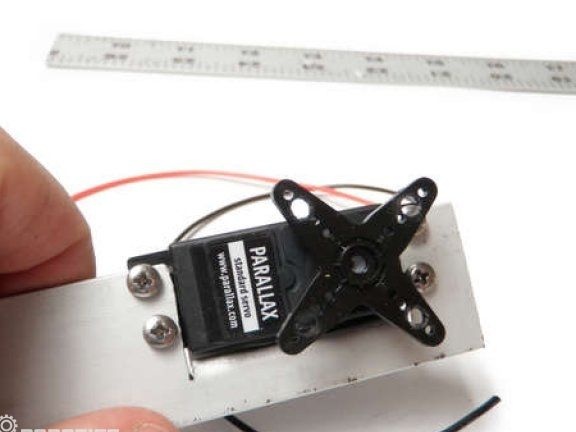
Ceturtais solis Dzinēja uzstādīšana
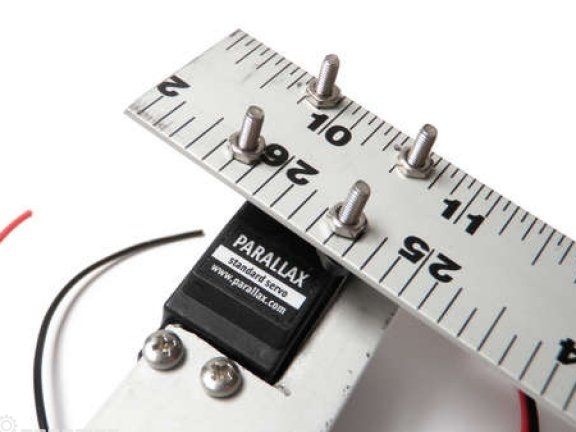
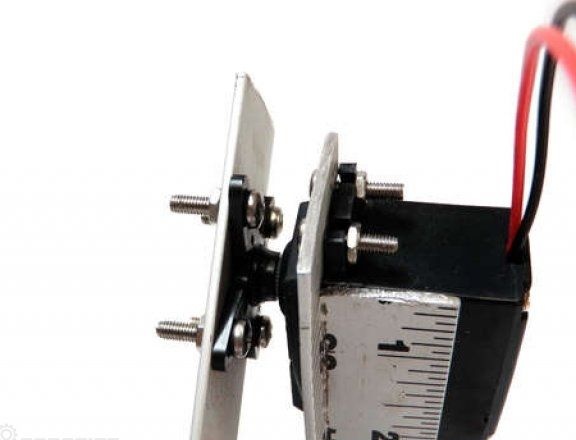
Motors jāuzstāda uz lineāla ar uzgriežņiem un skrūvēm.Lai nodrošinātu zemu profilu, skrūvju galviņām jāatrodas servo lāpstiņu pusē. Pēc tam lineāla otrā puse jāpiestiprina pie servomotora asmeņiem. Šajā gadījumā skrūvju galviņas ir jāpagriež uz iekšu, lai nekas netraucētu lineālu kustībai.

Piektais solis Ķemmīšgliemeņu sagatavošana
Vienā ķemmītes pusē jānoņem divas collas zobu. Vienkāršākais veids, kā to izdarīt, ir ar sānu griezēju. Ķemmīšgliemenes malā jums jāatstāj noteikts skaits krustnagliņu, pateicoties viņiem ķemme turpinās darboties. Pie malas jums jāizurbj 1/8 "caurums. Pēdējā posmā ķemme tiek rūpīgi slīpēta ar smilšpapīru līdz vienmērīgai stāvoklim.






Sestais solis Ķemmīšgliemeņu uzstādīšana
Ķemmīšgliemeņu caurumā jāievieto skrūve, pēc tam skrūvei jāpieliek divas paplāksnes, tās ļaus jums ķemmi no lineāliem aizvest līdz noteiktam attālumam. Pēdējā posmā skrūve tiek uzstādīta lineālā, un pēc tam ķemmīšgredzens tiek fiksēts ar uzgriezni.

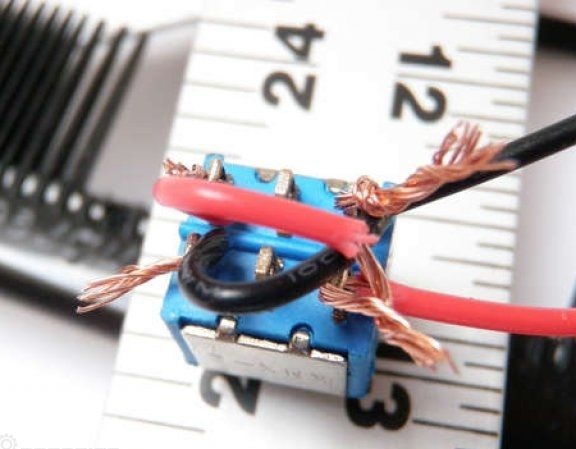
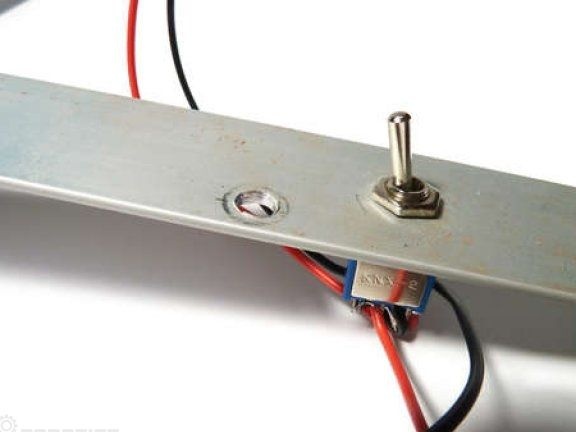
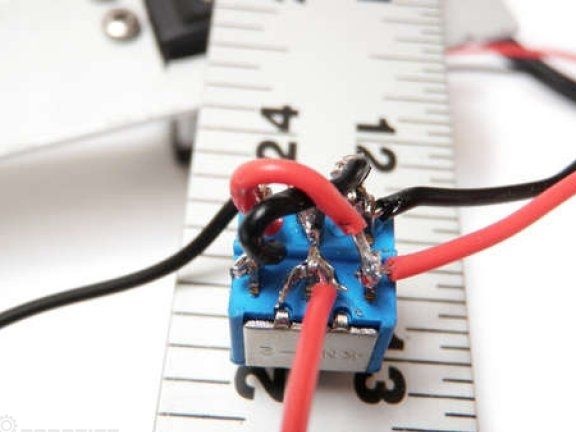
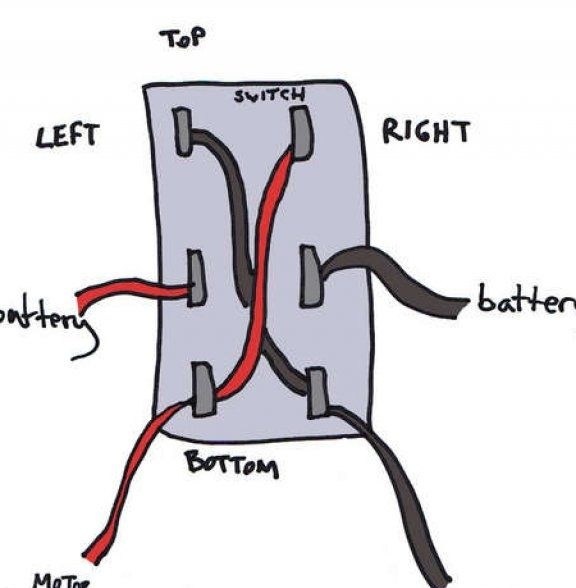
Septītais solis. Slēdžu montāža
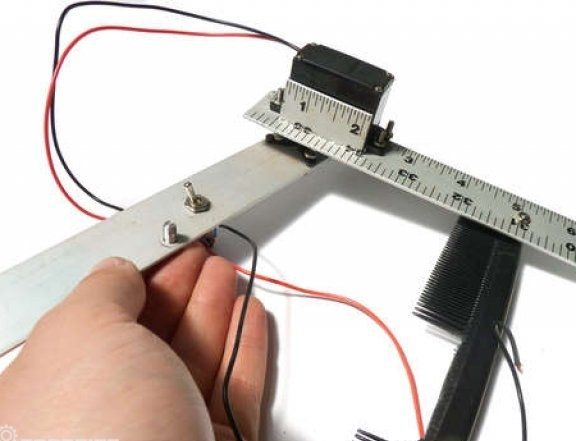
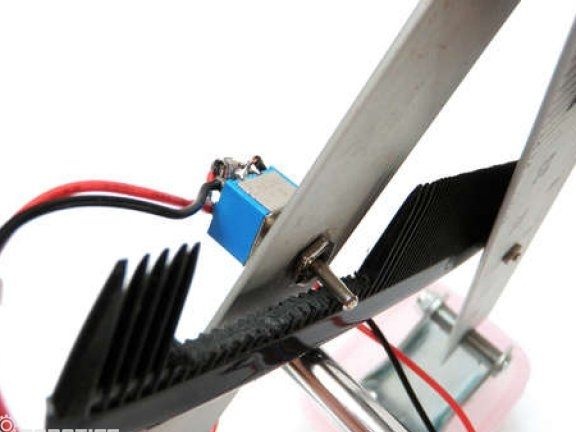
Slēdzis jāievieto sagatavotajā caurumā un jānostiprina ar uzgriezni. Slēdzis jāievieto fotogrāfijās norādītajā pozīcijā. Tagad jums jāņem divi stieples gabali, sarkans un melns, un lodēt tos pie slēdža, kā parādīts attēlā. Tad jums jāpielīmē divi gari vadi pie slēdža sānu kontaktiem.

Astotais solis. Pretsvara uzstādīšana.
Pretsvars ir uzstādīts tajā līnijas daļā, kur ir uzstādīts servomotors. Ķemme ir uzstādīta pretsvara augšpusē.
Deviņi soli. Nogrieziet rokturi
Paņemiet ampulu no lodīšu pildspalvas un pēc tam pildspalvveida pilnšļirci sagrieziet divos collas gabalos. Pēc tam saražotās caurules jāsagriež uz pusēm, kā rezultātā iznāks četras caurules.


Desmit solis Riteņu ieguve
Tagad jums jāņem divi veltņi un jāizjauc, noņemot riteņus. Riteņi ir jāatliek malā, tos var izmantot citos. mājās gatavots.



Vienpadsmit solis. Izveidojiet pagrieziena punktus
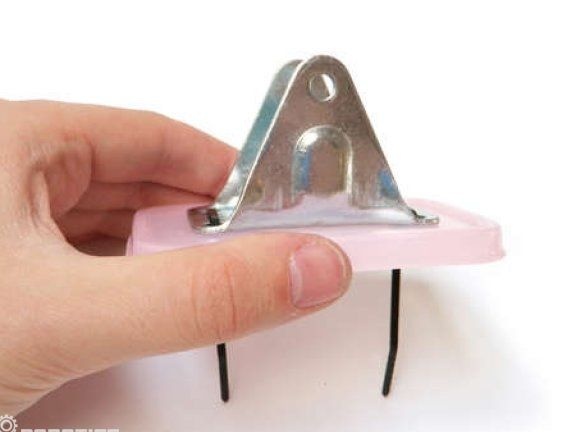
Korpuss no veltņa jānovieto plastmasas trauka vāka centrā. Tagad jums ir jāizurbj četri caurumi un jānostiprina elements ar saitēm.


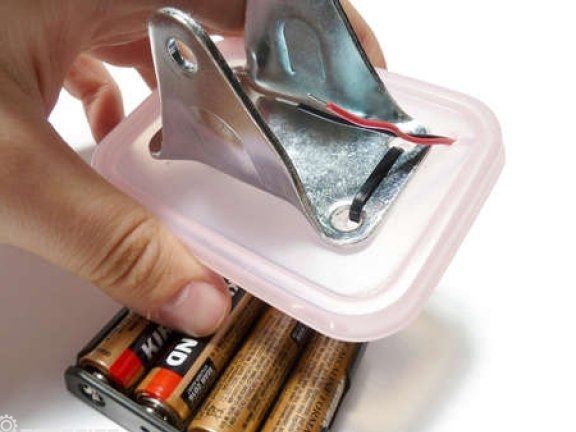


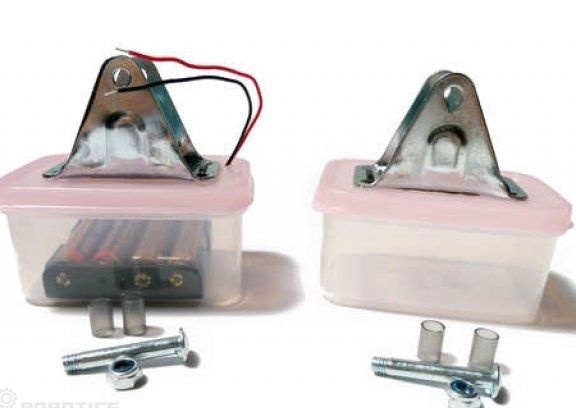

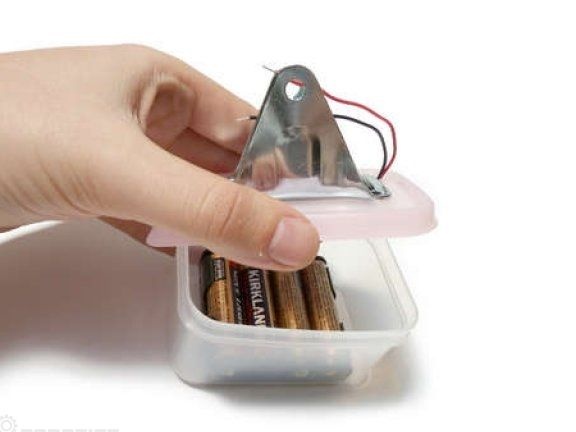

Arī šajā posmā jūs varat instalēt barošanas avotu. Lai to izdarītu, vienā no traukiem jums jāizurbj caurums un jāievieto baterijas iekšpusē. Pēc tam caur urbto caurumu jums jāizvada vadi.
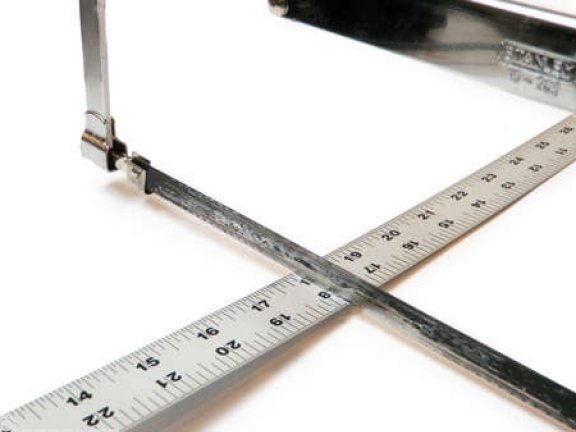
Divpadsmit solis. Robotu montāža
Tālāk abu lineālu gali jāpiestiprina pie balstiem, kā norādīts fotogrāfijās. Tagad paliek tikai savienot vadus no strāvas un slēdža, to ir viegli izdarīt atbilstoši vadu krāsām.
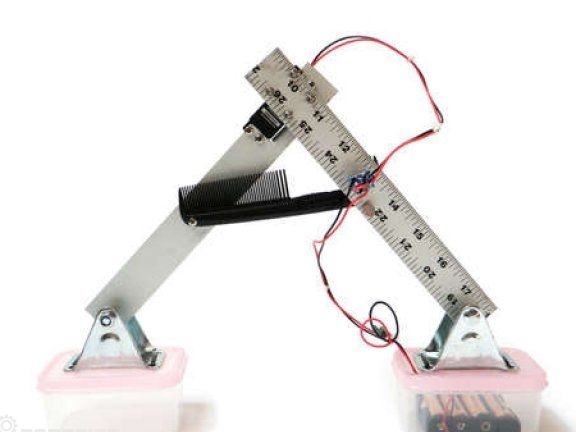
Tas ir viss, robots ir gatavs. Kad darbojas motors, robots sāk kustēties, kādā brīdī ķemmīšgliemene izslēdz jaudu un robota kājas atgriežas sākotnējā stāvoklī. Pēc tam slēdzis atkal ieslēdz ķēdi, un robota kājas atkal tiek saspiestas. Tātad viņš ies.