

Izgatavot šādu robotu ar savām rokām nepavisam nebūs grūti un pat interesanti. Rezultāts ir ļoti interesanta ierīce, kas izturēsies kā dzīva būtne. Tas viss pateicoties diviem maziem motoriem, tie ir tie, kas vada robotu. Mainot motora vārpstu uzbrukuma leņķi, jūs varat padarīt robotu ātrāku vai lēnāku. Varat arī eksperimentēt ar dažādiem padomiem, ko var valkāt uz motora vārpstas.
Materiāli un instrumenti:
- divi mazi motori (3 volti, atrodami bērnu rotaļlietās);
- bateriju turētājs (to var izdarīt pats vai izvilkt no vecā tālvadības pults, lukturīša utt.);
- divi SPDT tipa slēdži (tos var iegūt no vecas datora peles);
- divi mazi un viens liels saspraude;
- mazs ritenītis no rotaļlietas;
- plāna elektroinstalācija

Ražošanas process:
Pirmais solis. Lodēšanas elektroinstalācija
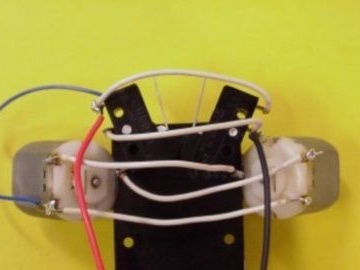
Pirmkārt, jums ir jāsagatavo vadi un jālodē tos visiem elektroniskajiem komponentiem, lai vēlāk būtu ērti savienot mezglus. Vadi ir jāsagriež 6 cm garumā un jānoņem no to galiem apmēram par 1 cm Tagad jums ir jālodē divi vadi pie motoriem un slēdžiem. Tāpat neaizmirstiet pielodēt divus vadus pie akumulatora turētāja kontaktiem. Citus vadu galus vēlams konservēt.

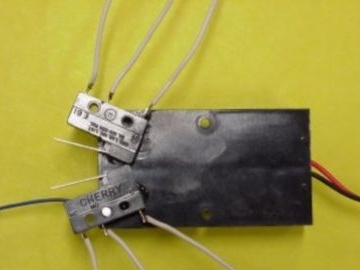
Otrais solis Iestatīšanas slēdži
Lai iestatītu slēdžus, akumulatora turētājam jābūt pagrieztam otrādi. Tagad jums jāpielīmē slēdži ar līmi pie akumulatora turētāja. Tā rezultātā vajadzētu veidoties burts V.
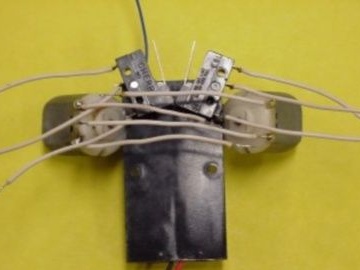
Trešais solis Dzinēja uzstādīšana
Motori jāpiestiprina pie akumulatora turētāja leņķī, kā parādīts attēlā. Pretējā gadījumā leņķiem abās pusēs jābūt vienādiem robots nedarbosies pareizi. Motora vārpstām jābūt balstītām pret ceļu. Motorus var uzstādīt ar līmi.

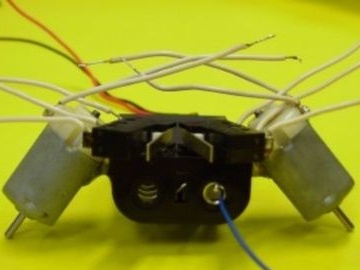
Ceturtais solis Stabilizatora riteņa uzstādīšana
Stabilizators ir nepieciešams, lai: mājās gatavots stāvēja līdzeni uz ceļa. Lai izgatavotu riteni, varat izmantot veltni no magnetofona vai riteni no bērnu rotaļlietas. Kas attiecas uz “spraudni”, tas ir izgatavots no gara saspraudes vai auklas.Noslēgumā jāsaka, ka stabilizators vienmērīgi pielīp pie akumulatora turētāja.

Piektais solis Elektroinstalācijas savienojums
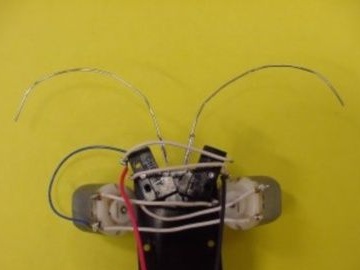
Lai robots darbotos pareizi, visiem vadiem jābūt skaidri savienotiem saskaņā ar shēmu. Ķēde ir redzama attēlā.
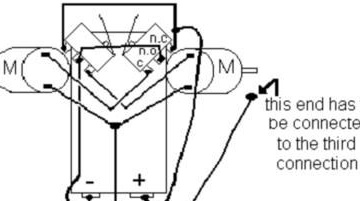

Sestais solis Padarīt ūsas par kļūdu
Ūsas kalpos par riteni vabolei, tiklīdz ceļā būs kāds šķērslis, ūsas ieslēgs slēdžus, un tad motori pagriezīs robotu citā virzienā. Kad slēdzis ir aktivizēts, viens no motoriem izslēdzas un tiek iedarbināts sava veida diferenciālis. Ja tiek aktivizēti abi slēdži, robots pilnībā apstājas. Ūsas ir izgatavotas no mazām saspraudēm, tās ir rūpīgi jāpielīmē pie slēdžu pogām.

Septītais solis. Robota galīgā pārskatīšana un pārbaude
Pēdējā posmā uz motora vārpstām jāuzstāda gumijas uzgaļi, tie ir nepieciešami labākai saķerei. Tos var izgatavot no cambric.
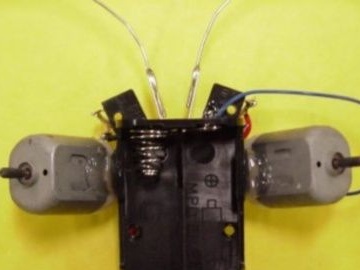
Tas ir viss, robots ir gatavs. Jums tas jāpalaiž uz gludas virsmas, piemēram, uz galda vai linoleja. Tā kā vaboles ķepas ir pārāk mazas, tā nepārmeklēs pa paklāju, tāpēc būs jāpalielina motora vārpstu gali.
Nākotnē robotu var uzlabot pēc saviem ieskatiem. Piemēram, viņš var izgatavot LED acis, kas iedegsies, saskaroties ar šķērsli.