

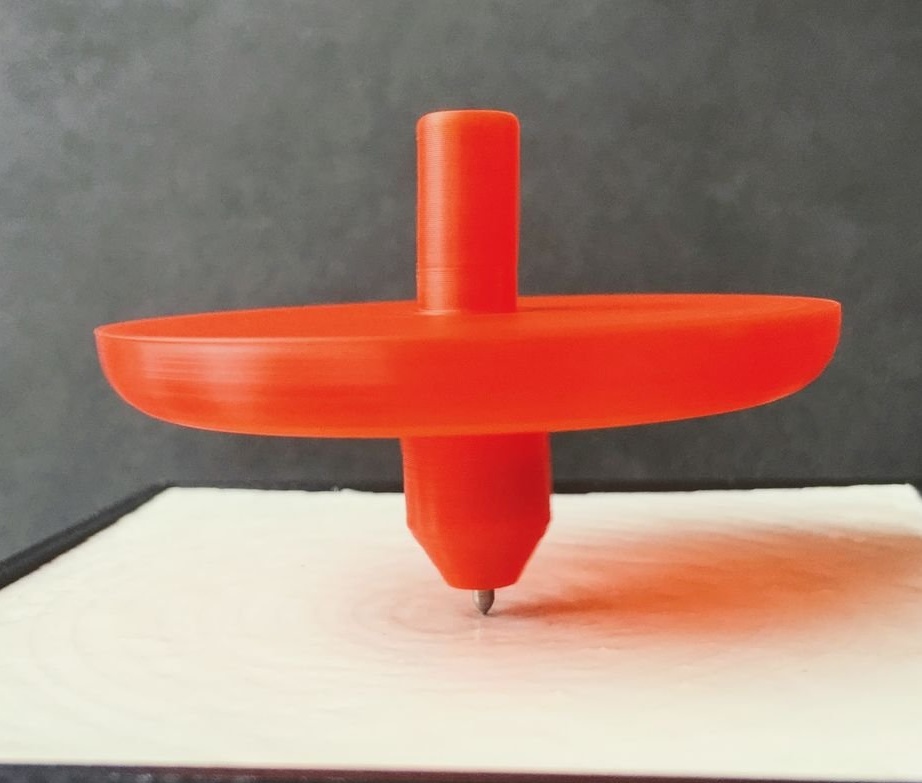
Kad augšdaļa griežas, tās kinētiskā enerģija pakāpeniski pārvēršas siltumā, un drīz tā apstājas. Pašdarināts, ko piedāvā Instructables autors ar segvārdu HowToEngineer, kompensē berzes zaudējumus, kas rodas no enerģijas piegādes no ārpuses. Vērpšanas virsma nepārtraukti griezīsies, līdz tas apgrūtinās pašu lietotāju un viņš izslēgs ierīci.
Ierīces darbības princips ir balstīts uz magnētu mijiedarbību:
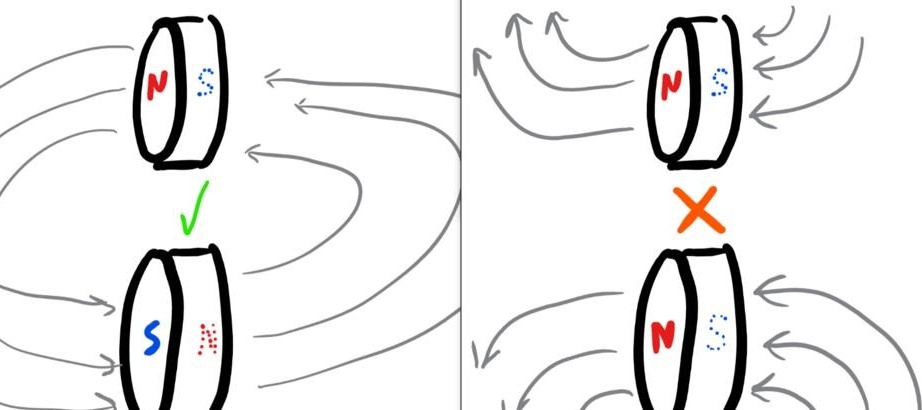
Ārpusē - magnēts, kas augšpusē ievilkts, iekšpusē - uz diska esošs magnēts, kuru ar elektromotora palīdzību pagriež. Lasītāji, kuri ieteica projektēšanā izmantot vairākus elektromagnētus, kurus pārmaiņus ieslēdz Arduinobūs vīlušies. Vai arī otrādi, viņi priecājas, ja uzskata, ka tas ir pārāk inženiertehnisks. Elektromotora rotācijas ātruma regulators ir stieples rezistors.
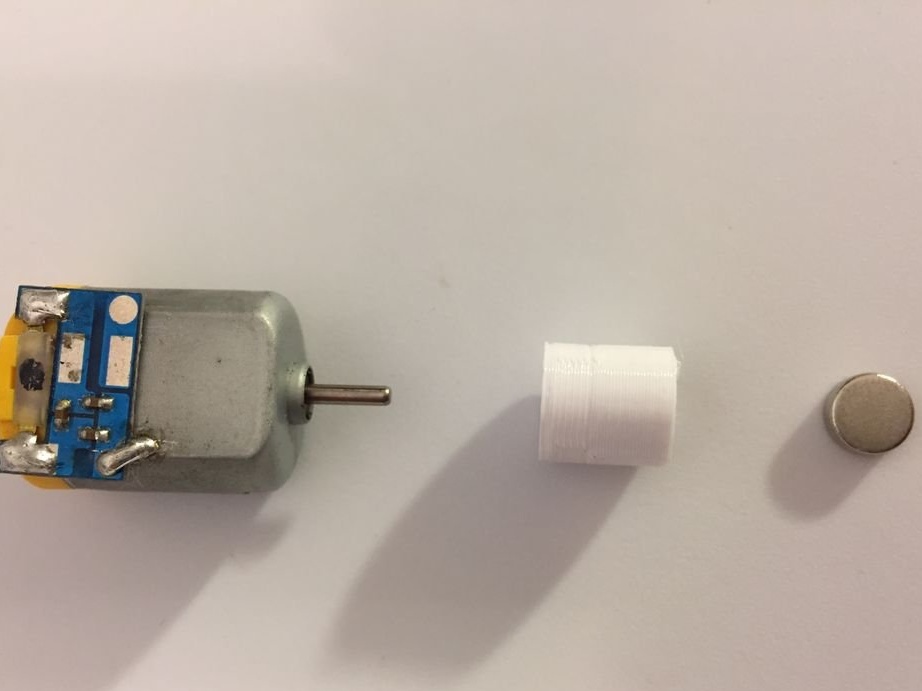
Tālāk ir sniegta dažas ierīces detaļas: slēdzis, vads (nepieciešams) mainīgs rezistors (ir piemēroti reitingi no 25 līdz 100 omi), elektromotors, plāns stieples vads, tieši zem šī visa ir divi magnēti, un ap ... pakaramais. Nebrīnieties, tas ir ļoti ērti, lai izgatavotu augšdaļas augšdaļu. Ja no tā iekodīsit ļoti mazu tērauda stieples gabalu, varat to vēl vairāk izmantot paredzētajam mērķim.

Protams, bez rīkiem nevar. Un, ja jums ir 3D printeris un divkomponentu epoksīda sveķi, viņiem ir darbs.

Izstrādājis visas 3D izdrukātās daļas, vednis augšupielādē divus arhīvus, no kuriem viens satur visi faili FreeCAD formātāotrais - visi STL faili. Tad tas savāc ierīces elektrisko daļu:

Pie motora vārpstas, kurā ir uzstādīts magnēts, piestiprina magnēta turētāju un pielīmē to ar epoksīdu. Kamēr tas izžūst, tuvumā nedrīkst atrasties priekšmeti, kas varētu piesaistīt magnētu, tādējādi izvelkot to no adaptera. Sveķiem nedrīkst ļaut iekļūt motora gultņos - tie nevarēs pagriezties. Polaritāte jāizvēlas tā, lai, skatoties no augšas, motors grieztos pulksteņrādītāja virzienā. Ja esat ar kreiso roku - pretēji pulksteņrādītāja virzienam.
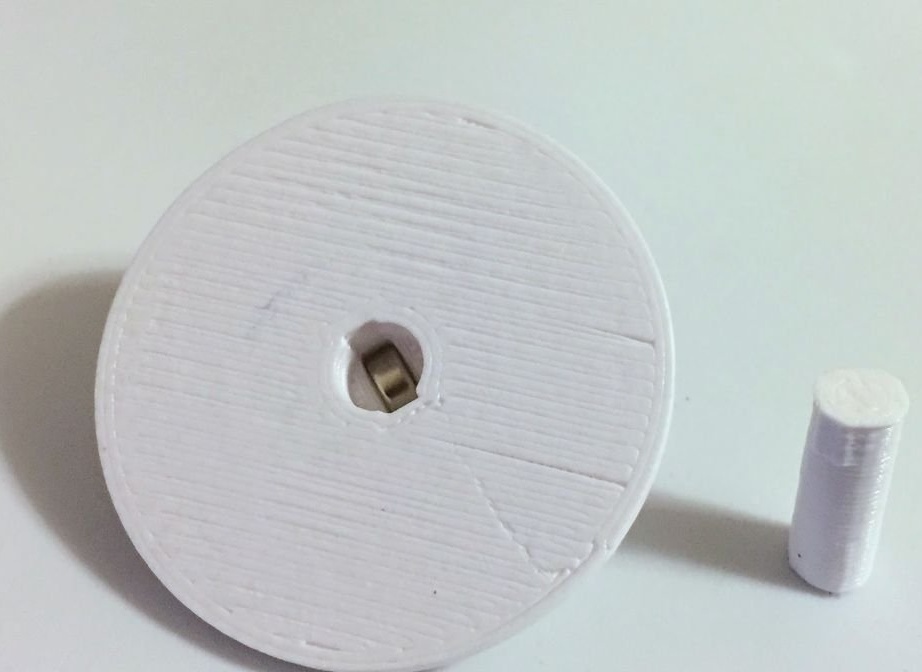
Instalē visu lietu, nākamajā fotoattēlā parādīts, kā tieši magnēts atrodas adapterī. Kļūst arī skaidrs, ko darīt ar motora stiprinājumu un adapteri, ja nav 3D printera. Rokturis mainīgajam rezistoram var būt jebkurš piemērots, gatavs vai mājās gatavots.

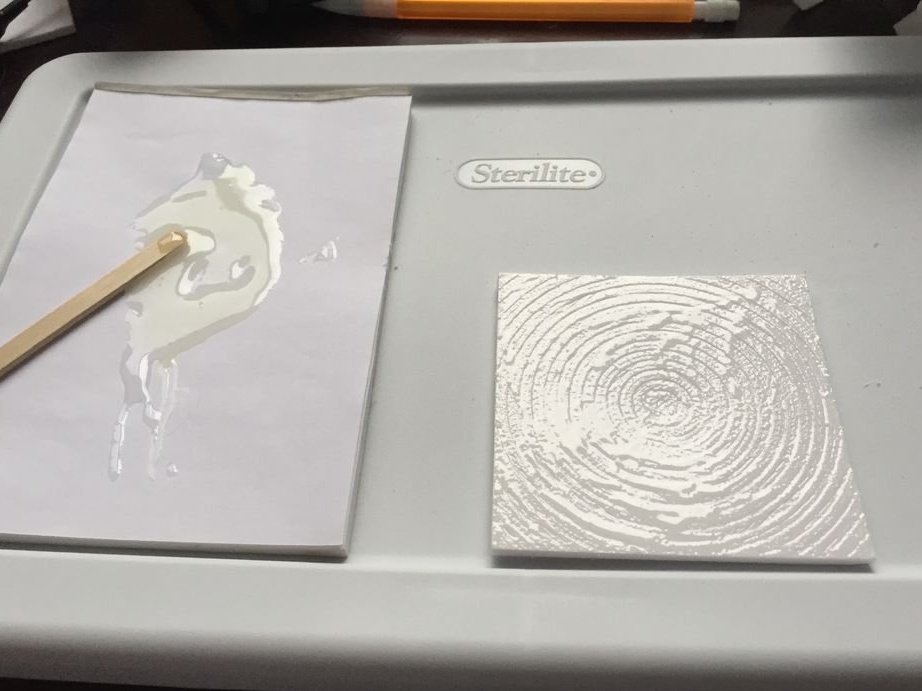
Tam nav piemērota virsma, uz kuras tūlīt pēc 3D drukāšanas griezīsies vērpšanas virsma. Meistars to pulē, uzklāj epoksīda slāni, to sacietē, vēlreiz pulē un uzklāj otru kārtu. Pēc sacietēšanas iegūst gludu virsmu.
Gatavā daļa aizver korpusu, un ierīce ir gatava:

3D drukātās galotnēs (tās var izgatavot arī citā veidā) uzstāda magnētus, pārklāj tos ar cilindriem un blīvējumiem:
Vienam no diviem galotnēm jau ir plastmasas gals. Jūs varat to izmantot uzreiz, bet tas ātri kļūs blāvs - jums tas jānoslīpē. Otrajam augšdaļai kapteinis no pakaramā nogriež nelielu tērauda stieples gabalu:

Asina to, augšpusē izurbj caurumu, ielīmē iegūto galu tur:
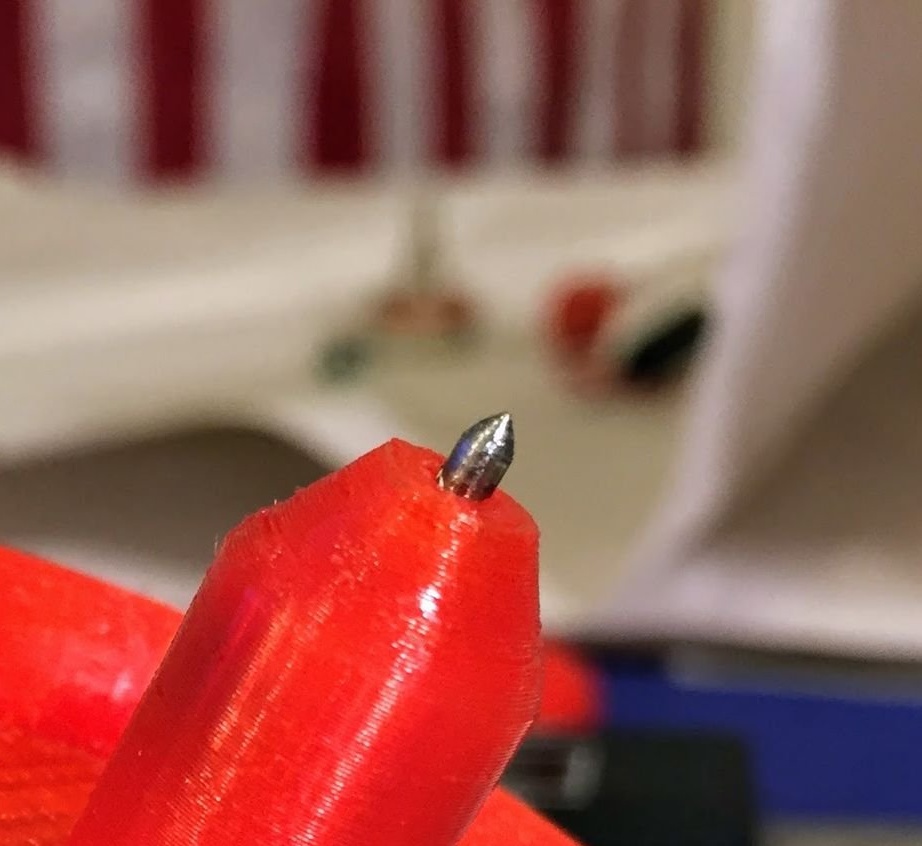
Abi vērpšanas galviņas ir gatavas:

Ja augšdaļas rotācijas virsma netika veidota ar 3D drukāšanu, bet gan kādā citā veidā, un tā izrādījās uzreiz gluda, tā ir jānoslīpē un jāpārklāj ar epoksīdu, kā aprakstīts iepriekš. Pretējā gadījumā tas ātri nolietojas no metāla uzgaļa ietekmes. Jebkurā gadījumā ir jāparedz iespēja nolaist šo daļu un noņemt to, lai piekļūtu akumulatora nodalījumam.
Meistars maina mainīgo rezistoru līdz minimumam, uzliek virsu virsmai, atskrūvē augšdaļu, ieslēdz strāvu, maigi pagriež mainīgo rezistoru, līdz tiek pārvarēta berze gultņos - motors sāk griezties. Tas nedaudz palielina ātrumu un pēc tam samazinās, līdz motora ātrums sakrīt ar augšdaļas ātrumu. Tas ir sinhronizēts ar motoru, un tas būs pamanāms, strauji mainot skaņu. Tagad jūs varat palielināt ātrumu līdz vēlamajam. Vērpšanas galviņa griezīsies, līdz ierīce tiek izslēgta, vai līdz brīdim, kad baterijas / akumulatori ir izlādējušies, ir nodilušas sukas, motora gultņi, un pirmajam augšdaļai ir arī uzgalis. Visas kļūdas ir viegli novērst, un viss atkal darbosies. Varat arī nodrošināt ieeju 5 V PSU un impulsa stabilizatoru, lai pārveidotu šo spriegumu līdz 3,3 V, un mainīga stieples rezistora vietā izmantojiet arī PWM kontrolieri.