
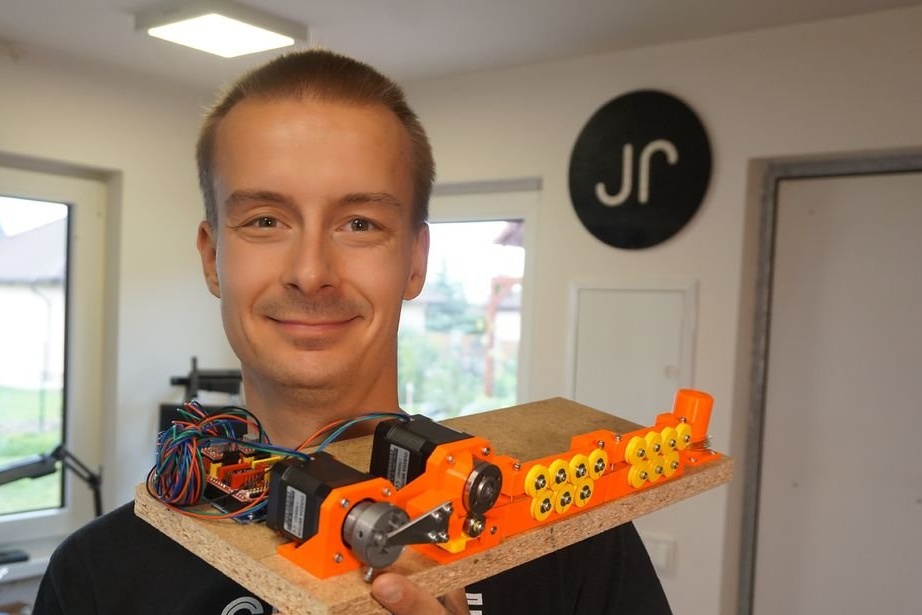
Meistars izgudroja un izgatavoja interesantu ierīci, tas ir jebkuras formas stieples liekšanas aparāts. Atsperu izgatavošana ir viena no tās iezīmēm. Šī mašīna spēj saliekt 0,8 / 0,9 / 1 mm stiepli jebkurā 2D formā.
Šīs mašīnas ražošanas galvenais mērķis bija automatizēt liekšanas procesu. Citas mājās gatavotas mašīnas nav īpaši precīzas, un to līkumiem ir diezgan liels rādiuss.
Otrais uzdevums bija padarīt to pēc iespējas vienkāršāku, izmantojot parasti pieejamās detaļas un komponentus. Dažas mašīnas detaļas tiek drukātas uz 3D printera, un metāla daļas var iegādāties veikalā.
Kāds ir šādas mašīnas kapteinis? Viņš ir ieinteresēts izgatavot LED figūras, sniegpārslas, zvaigznes, ziedus utt. To ražošanā ir vajadzīgas identiskas detaļas no stieples, un šī mašīna atvieglos to ražošanu.
Noskatīsimies īsu video ar ierīces piemēru.
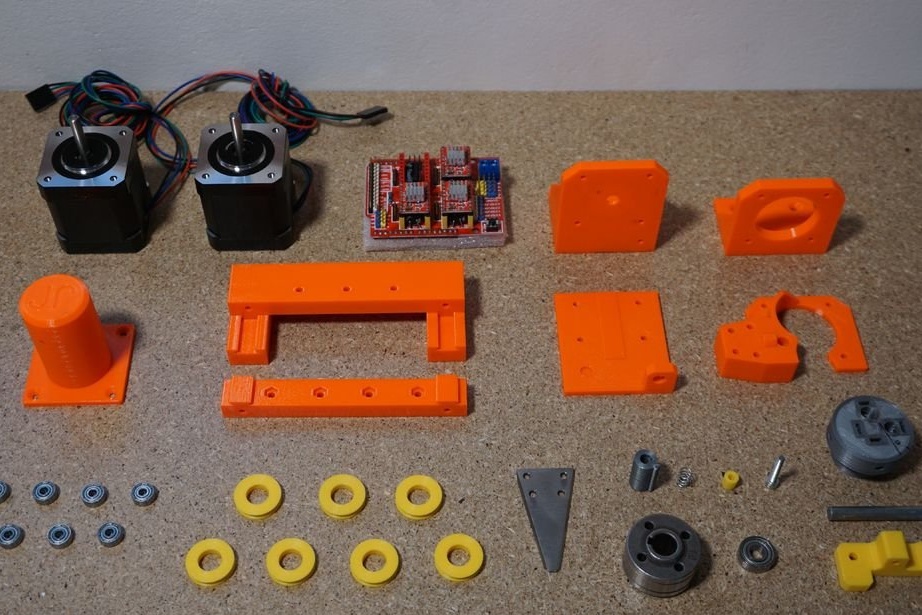
Tātad, šādas mašīnas ražošanā meistars izmantoja šādus
Instrumenti un materiāli:
-3D informācija (drukas failus var lejupielādēt šeit);
-Stiprinājumi;
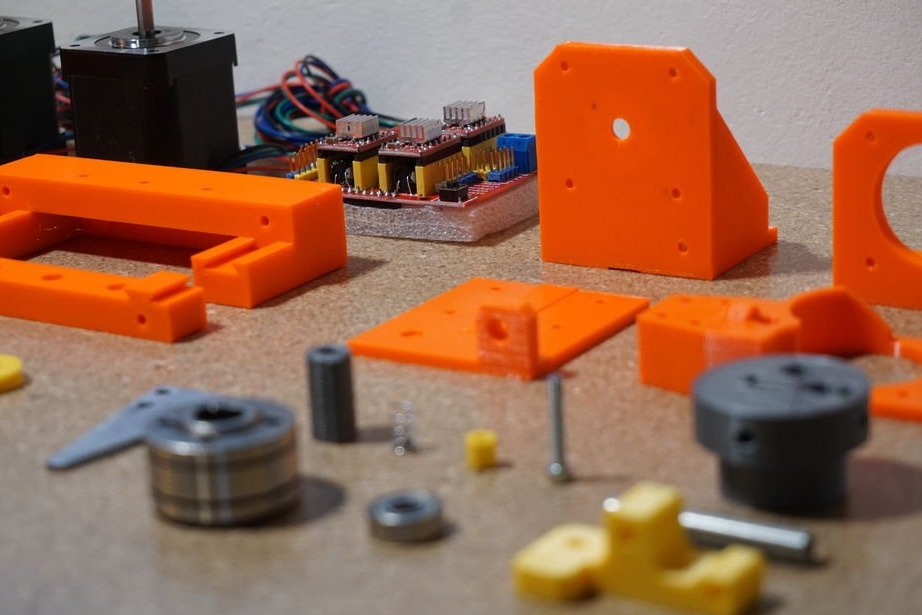
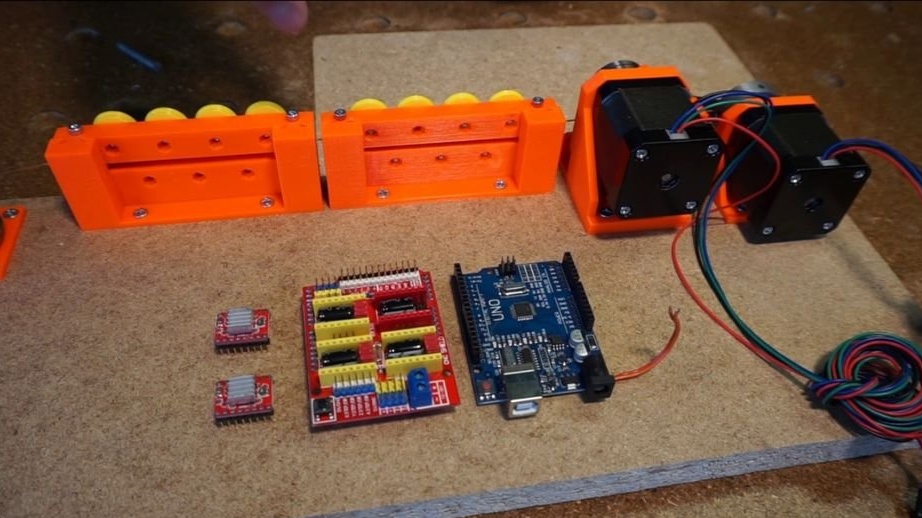
-Arduino UNO;
-Papildu plāksne Arduino UNO;
-Pakāpes draiveris A4988 -2 gab .;
-Pakāpju motors NEMA17 -2 gab .;
-12V 3A barošanas avots;
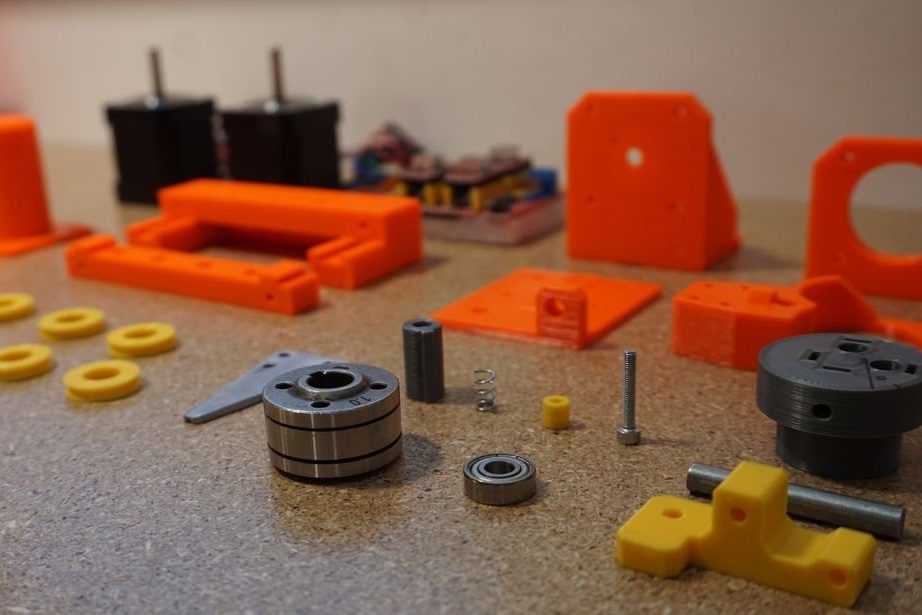
- stieples padeves mehānisms;
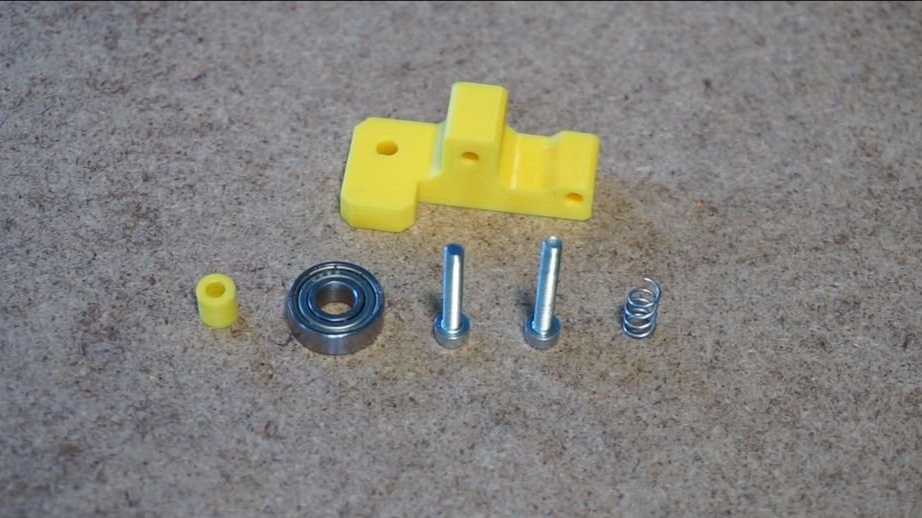
-Stērauda atspere 4x6 mm;
- gultnis 3x10x4 mm;
-Gultnis 6x15x4 mm;
-6 mm tērauda stienis;
- tērauda loksne 2 mm bieza;
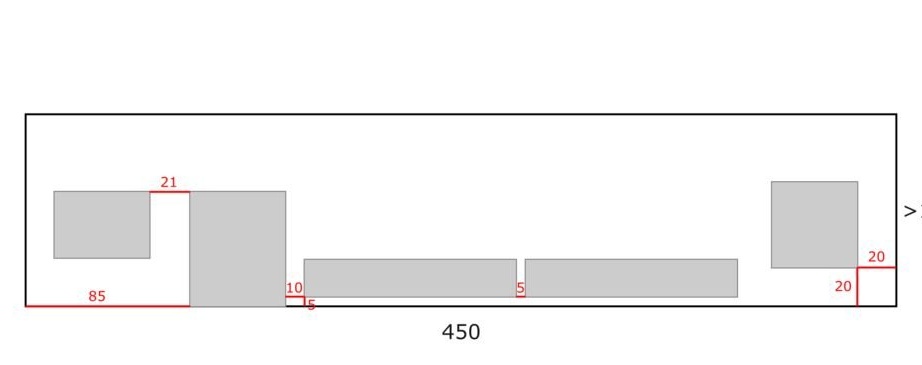
-Koka dēlis pamatnei 450x100 mm;
- skrūvgriezis;
-Gon;
Pirmais solis: kā tas darbojas
Apskatīsim, kā mašīna darbojas (no labās uz kreiso).
Rituļa turētājs - tas satur stieples spoli iekārtas apstrādei.
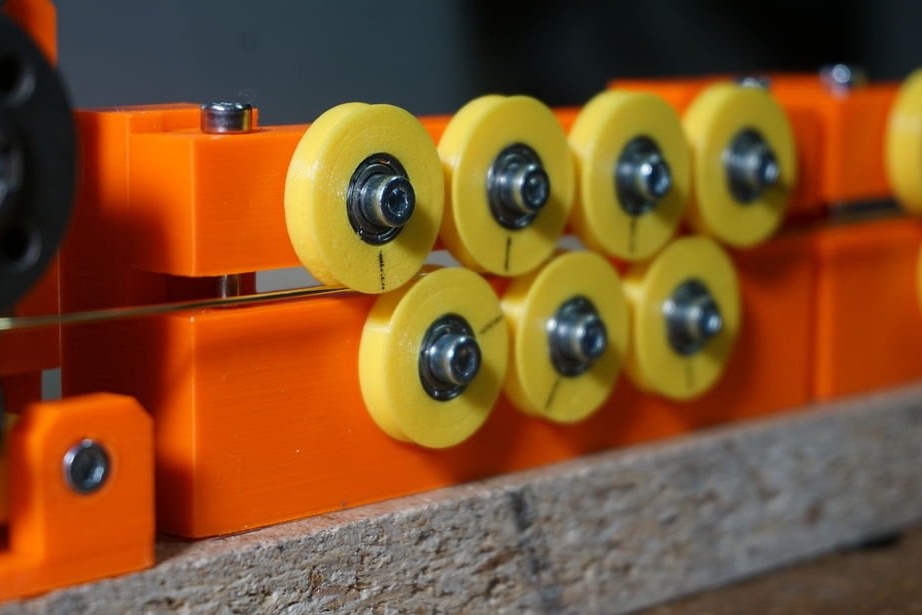
Taisngriezis - 7 veltņu komplekts, lai vads būtu pēc iespējas vienmērīgāks. Darbs ar taisnu stiepli ir izšķirošs. Tāpēc divi taisngrieži.
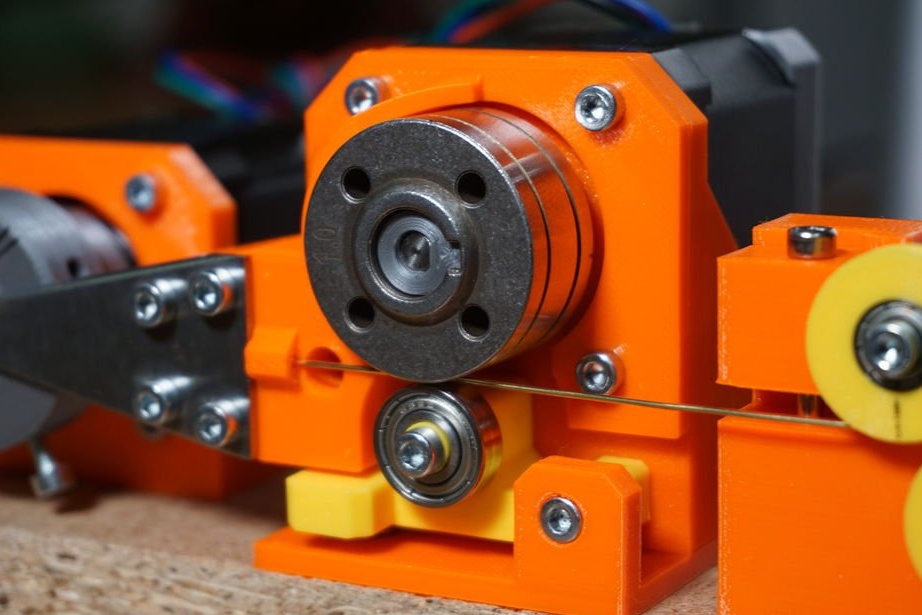
Broša - jūs varat atrast līdzīgu mehānismu savā 3D printerī. Pārnesumu komplekts izvelk vadu no ruļļa caur veltņiem un nospiež to uz lieces galvu. Padeves mehānismam jābūt pietiekamam stieples spiedienam, lai tas neslīdētu. Vairāk par to vēlāk.
Liekšanas mašīna - tā saliek vadu ieprogrammētā formā.
To visu kontrolē viens Arduino UN ar CNC vairogu.No datora tiek nosūtīta komanda Arduino, un tas tos pārveido par pakāpju motoru komandām.

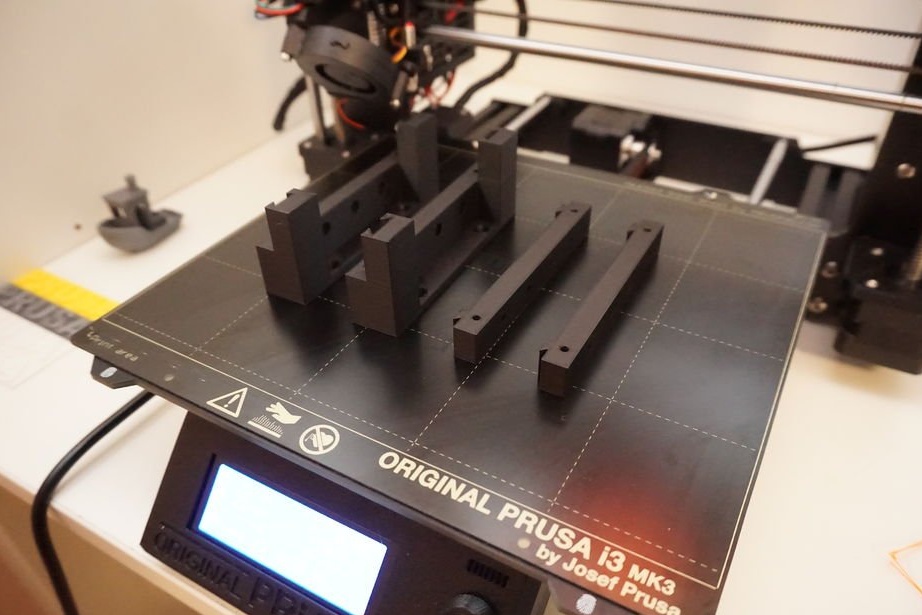
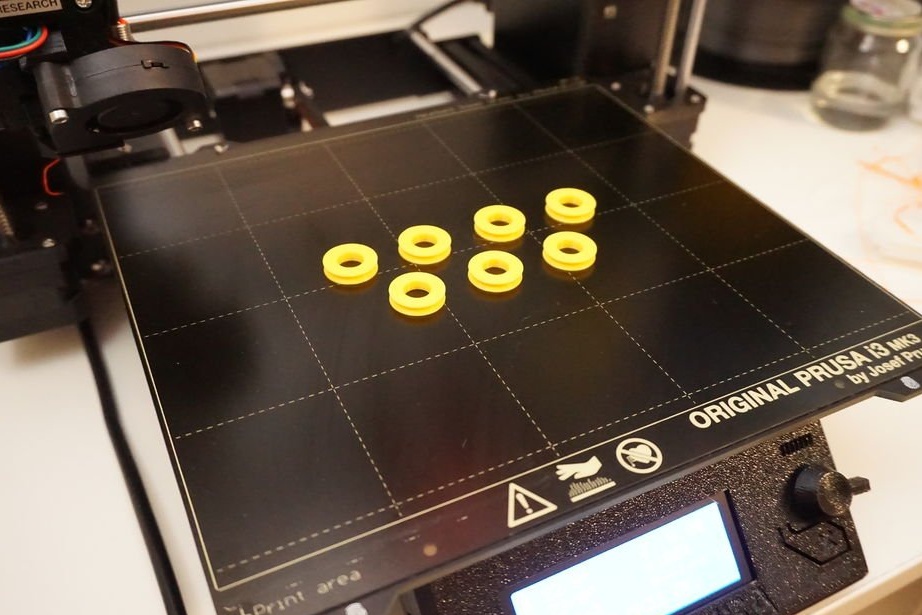
Otrais solis: Daļu drukāšana
Jums jāizdrukā šāda informācija šādā daudzumā (lai izvairītos no neskaidrībām, oriģinālais teksts):
Benders
Instrumenta galva
Motora rāmis
Feeeder
Motora rāmis
Apakšējais rāmis
Stieples vadotne
Dīkstāves pārvads
Dīkstāves zobratu starplika
Barošanas rīku starplika
Liekšanas plāksne (veidne)
Iztaisnošanas veltņi (2x)
Gultas rāmis (2x)
Augšējo pārnesumu rāmis (2x)
Veltnis (14x)
Spoles turētājs
Slāņa augstums drukājot 0,15 mm. Pildījums 40% Drukāšana ilgst 2 dienas.
Trešais solis: liekšanas mašīna
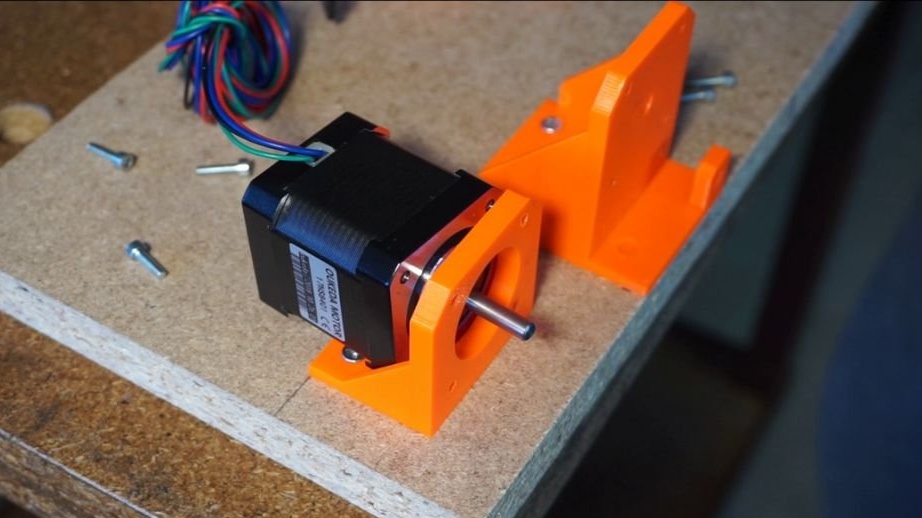
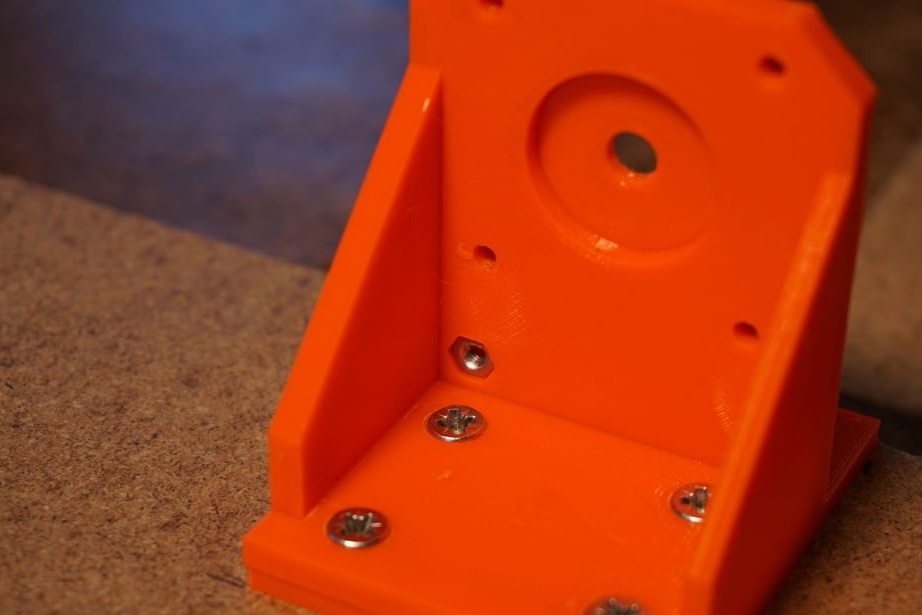
Kapteinis piestiprina divus rāmjus pie pamatnes. Ir svarīgi uzstādīt abus rāmjus, kā parādīts zīmējumā.
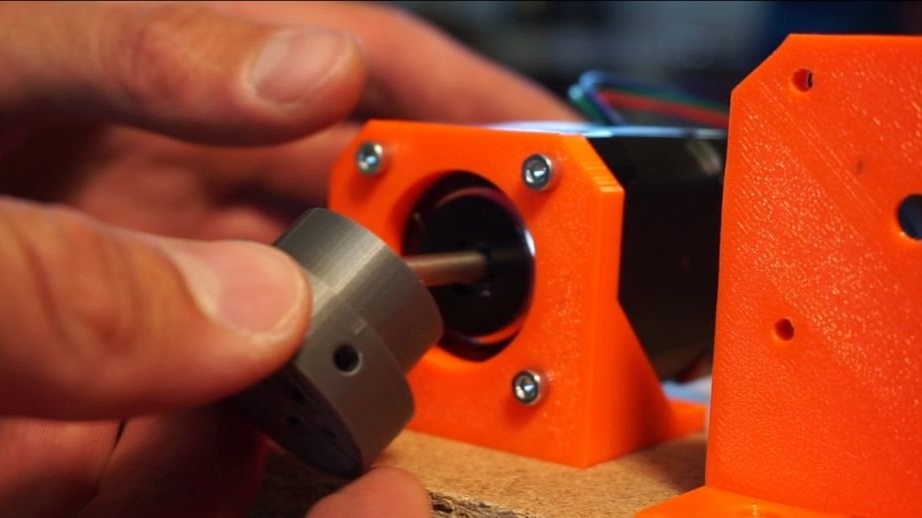
Nostiprina pakāpiena motoru pie rāmja. Nostiprina galvu pie motora vārpstas.


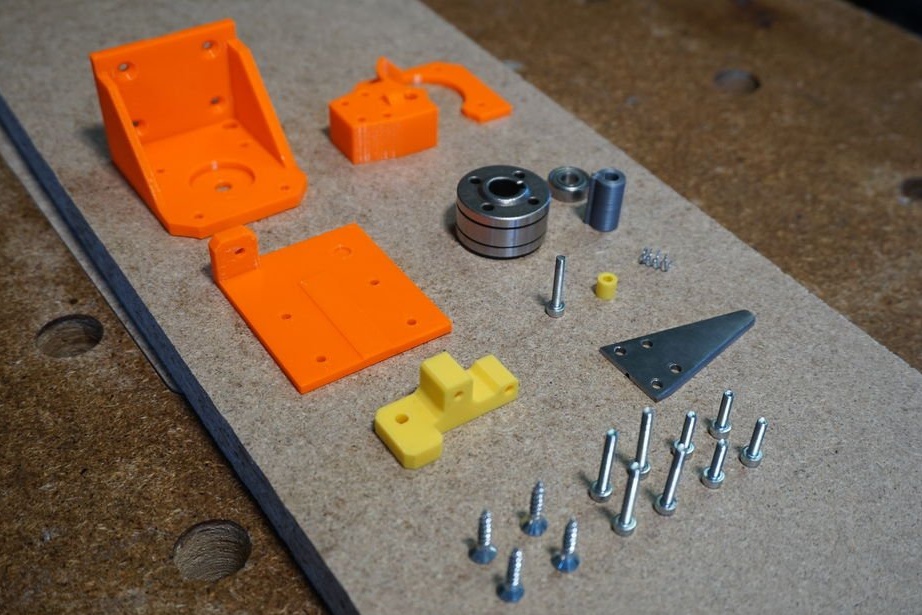
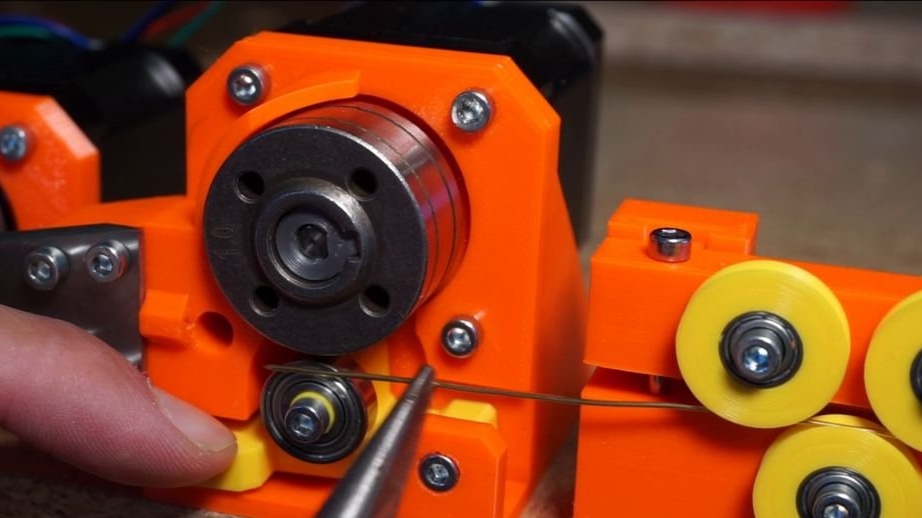
Ceturtais solis: Broach
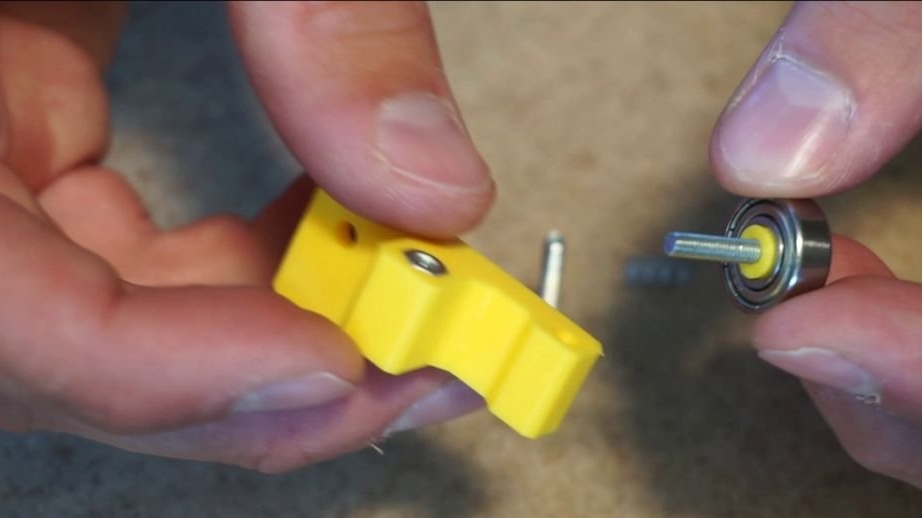
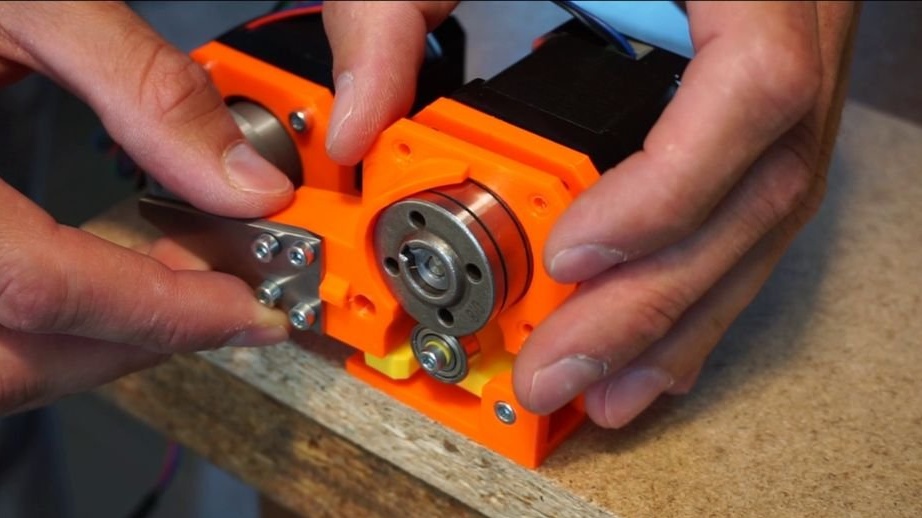
Rāmis jau ir uzstādīts, tāpēc pirmais solis padeves mehānisma izveidē ir starpposma pārvada uzstādīšana, kas piespiedīs vadu pie padeves mehānisma. Noņemiet plastmasas blīvi 6x15x4 mm gultņa iekšpusē. Uzstādiet gultni pie M3x20 skrūves. Ievietojiet M3 uzgriezni karietē un pieskrūvējiet gultni uz skrūves. Pārliecinieties, ka gultnis brīvi griežas. Ievietojiet otro M3 uzgriezni motora rāmī (motora puse apakšējā kreisajā stūrī) un, izmantojot M3x20 skrūvi, ieskrūvējiet karieti caur mazo stiprinājumu. Nepārvelciet skrūvi, vagonam jāpārvietojas brīvi. Paceliet ratiņus un ievietojiet atsperi caurumā zem tā.
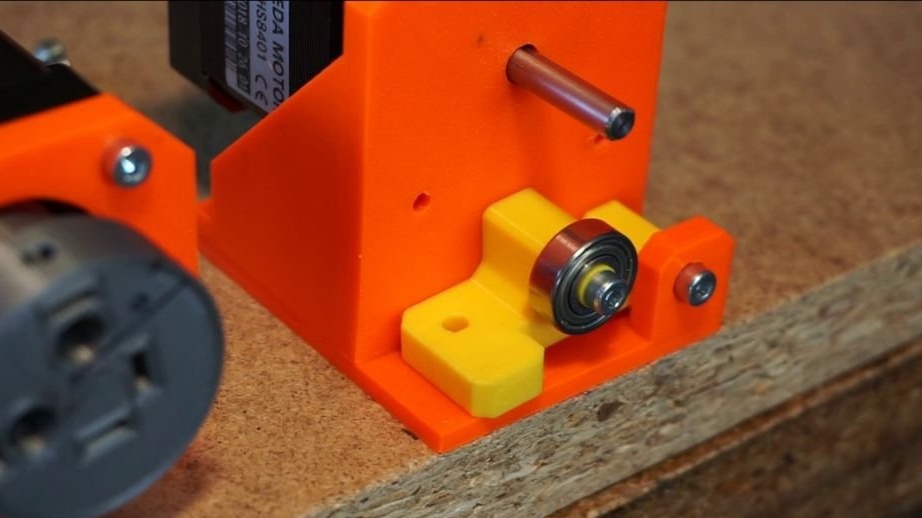
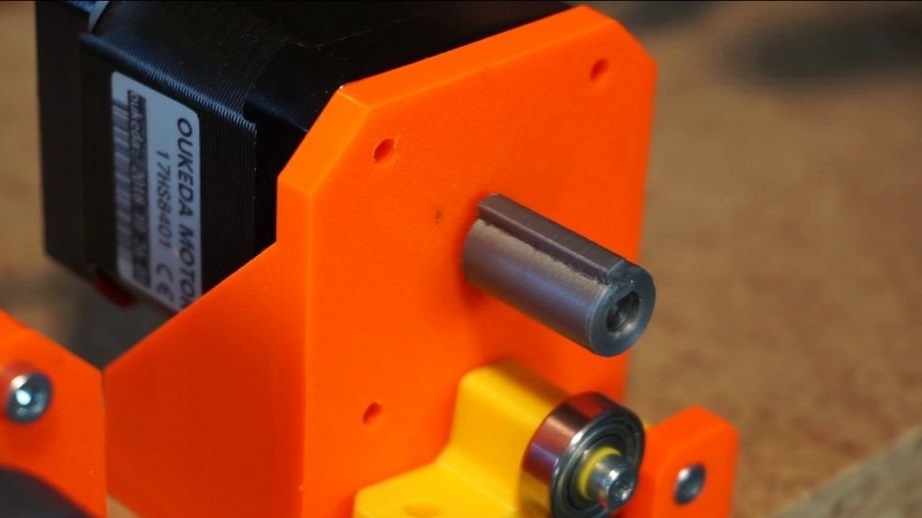
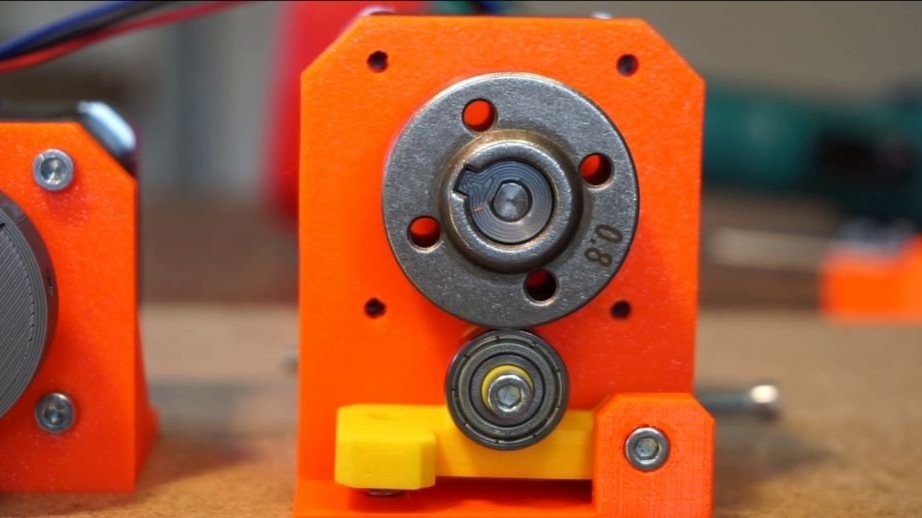
Paņemiet otro pakāpju motoru un uzstādiet to motora rāmī. Vēl neskrūvējiet. Piespiediet padeves mehānisma starpliku pie motora vārpstas un uzstādiet padeves mehānismu.
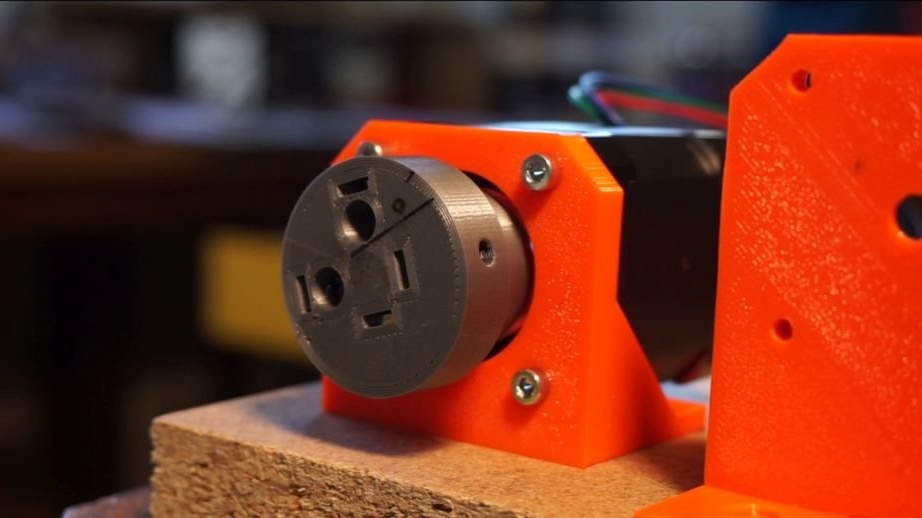
Padeves mehānisms, kuru meistars izmanto, ir ņemts no MIG metināšanas iekārtas. Mehānismam uz spoles ir divi padziļinājumi. Viens 0,8 mm stieplei un otrs 1 mm stieplei. Atšķirībā no pārnesumiem (iepriekš kapteinis mēģināja stiepli pabarot ar tiem), šis mehānisms neatstāj pēdas uz stieples.
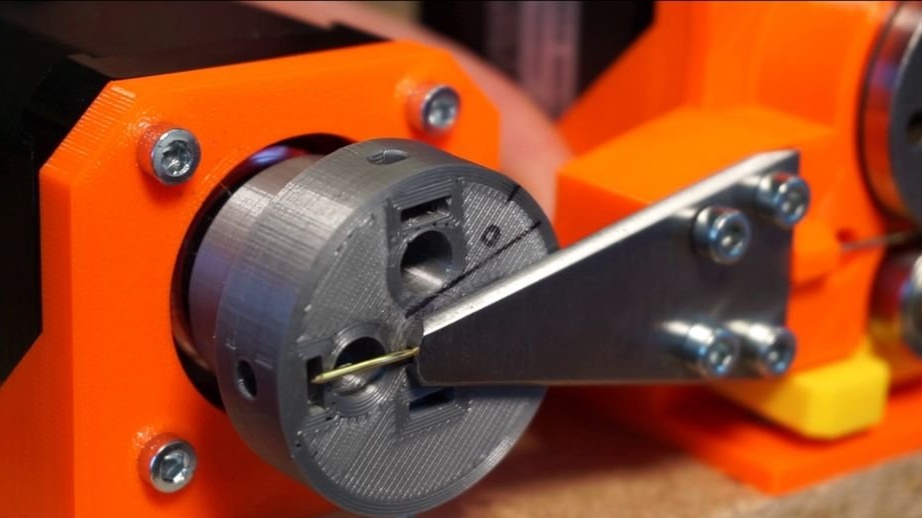
Padevēju un liekšanas ierīci savieno liekšanas plāksne - 2 mm bieza metāla plāksne ar nelielu rievu aizmugurējā sienā, kas stiepli pavada tieši uz liekšanas galvas centru perfektai saliekšanai. Drukāšanai ir plastmasas liekšanas plāksne, kas darbojas lieliski, bet ātri nolietojas un ir bieži jāmaina. Jūs to varat izmantot, vai arī uz tā varat izgatavot metāla plāksni.
Pēc tam paņemiet stieples vadotnes plastmasas daļu un četros M3 uzgriežņus ievietojiet caurumos tā aizmugurē. Tagad pieskrūvējiet liekšanas plāksni ar M3x20 skrūvēm. Ievietojiet stieples vadotni padeves mehānisma motora rāmja priekšā un piestipriniet to pie motora ar četrām M3x12 skrūvēm. Pielāgojiet liekšanas plāksnes stāvokli. Tam vajadzētu būt tieši lieces galvas centrā.
Broša ir gatava. Ja jums ir taisns vads, jūs varat to izmantot tūlīt. Pretējā gadījumā jums ir nepieciešams taisngriezis.





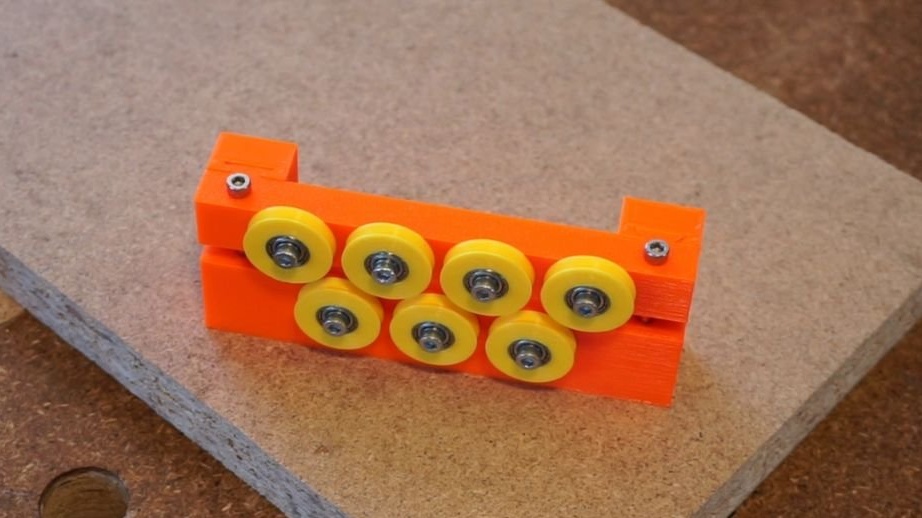
Piektais solis: Broach
Vads parasti tiek piegādāts spoles formā. Lai saliektu vadu, vispirms tas ir jāiztaisno. Taisngriezis sastāv no 7 veltņiem (4 augšpusē un 3 apakšā), kurus var piespiest viens otram, lai nodrošinātu pareizu stieples spriegojumu. Tas arī novērš stieples sagriešanos liekšanas laikā.
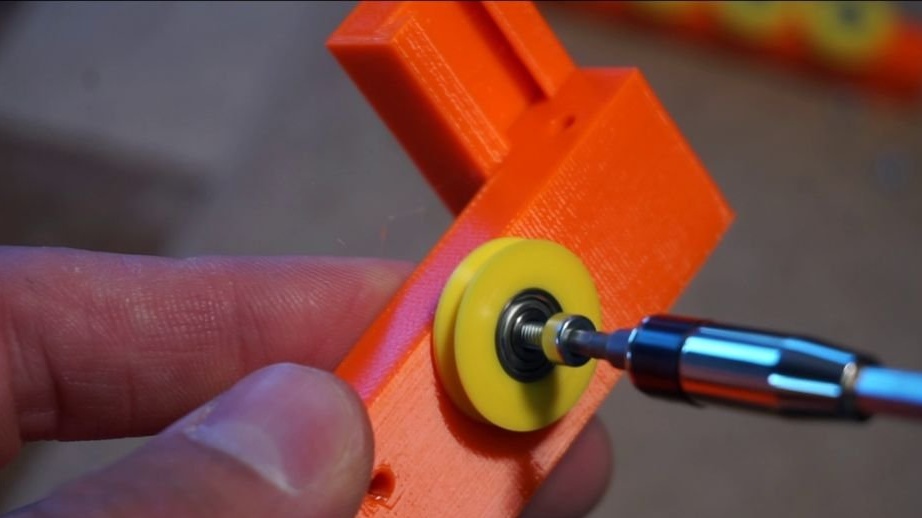
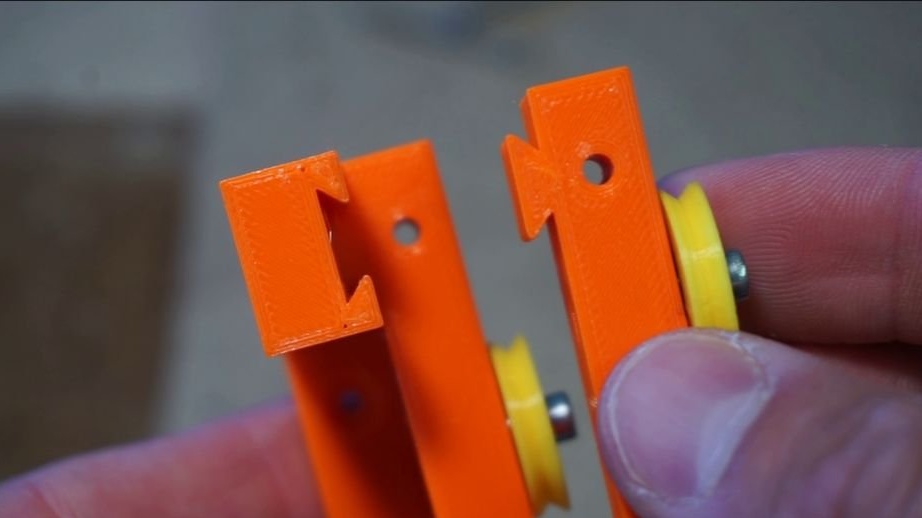
Sāciet montāžu ar rullīšu ritentiņiem. Vispirms jums jāiespiež gultnis 3x10x4 mm plastmasas veltņa apvalkā. Vienā pusē ievietojiet M3x12 skrūvi, bet otrā - M3 paplāksni. Paplāksne novērsīs riteņa berzi uz rāmja. Pieskrūvējiet visus veltņus apakšējam un augšējam rāmim. Savienojiet abus rāmjus. Nostipriniet rāmjus ar divām M3x40 skrūvēm.
Jūs varat ietaupīt naudu par rullīšu gultņiem. Izdrukājiet Straightener_RollerNoBearing daļu, nevis Straightener_Roller. Bet sniegums būs nedaudz sliktāks.
Lai iegūtu vēl labākus rezultātus, izmantojiet 2 iztaisnotājus pēc kārtas.




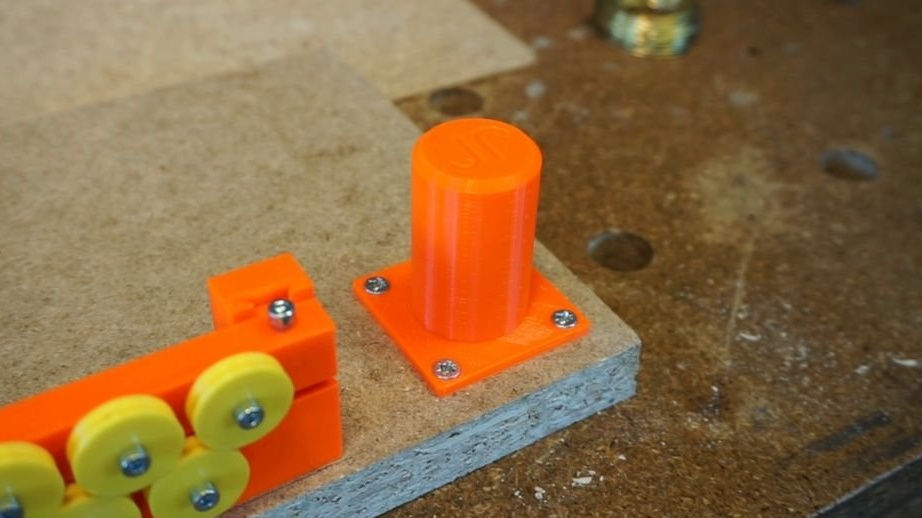
Sestais solis: spoles turētājs
Tītavas turētājs ir vienkāršs cilindrs, kas tur stiepli un ļauj tam atritināties no tītavas. Pieskrūvējiet to pie pamatnes ar četrām 3x16 skrūvēm.
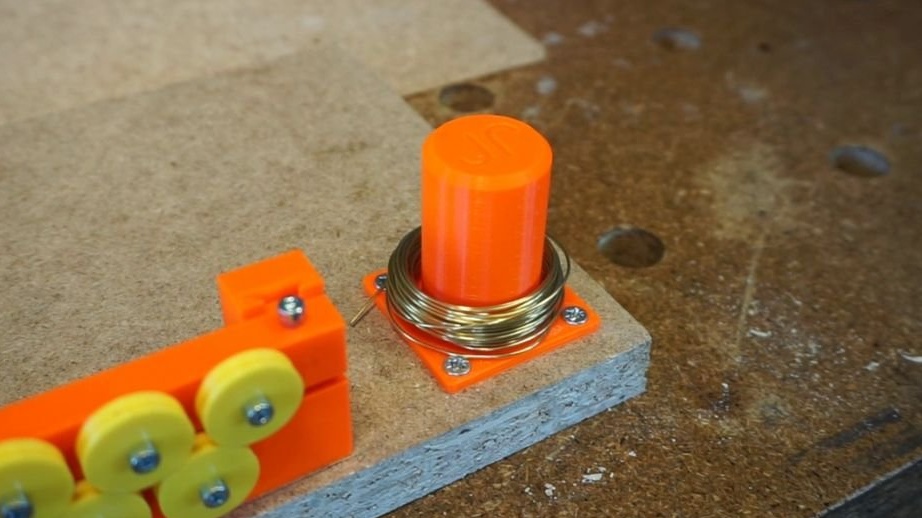
Septītais solis: izveidojiet savienojumu
Pirmkārt, liekšanas stieple jābaro mašīnā. Meistars izmanto 0,8-1 mm misiņa stiepli spoles formā.
Vads no spoles iet caur veltņiem. Vienkārši pielīmējiet stiepli starp veltņiem. Tad viņa iziet cauri brošai.Pielāgojiet padeves mehānisma stāvokli tā, lai notekas būtu vienā līmenī ar stieples vadotnes virsmu. Nospiediet sviru starpsajūgā un stiepiet vadu caur padevēju līdz liekšanas plāksnei. Atlaidiet sviru un ļaujiet tai piespiesties pret padeves mehānismu. Tagad jūs varat manuāli ritināt padeves mehānismu, lai stieptu stiepli pie liekšanas galvas. Uzmanīgi noregulējiet veltņu spriegojumu, pievelkot skrūves. Rullīšiem nevajadzētu brīvi griezties, bet vadam jāpārvietojas vienmērīgi.
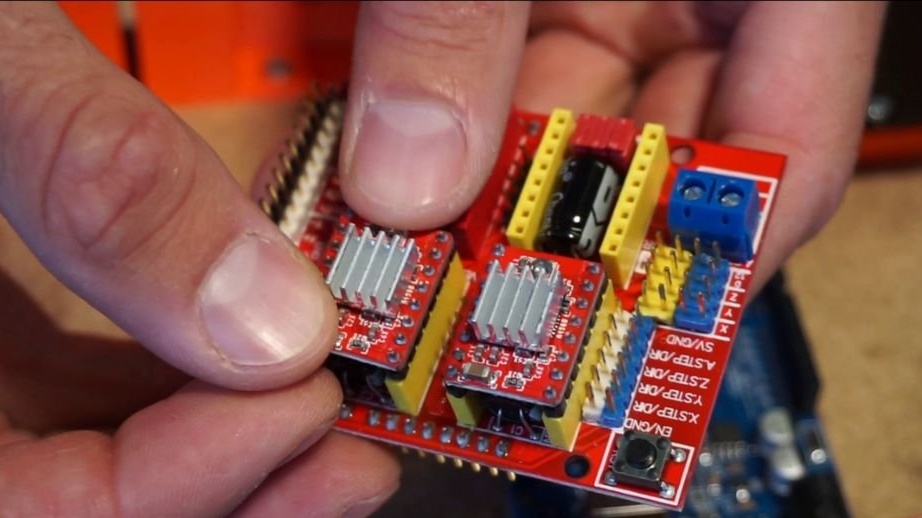
Otrkārt elektronika Kontrolierim jābūt arī savienotam. Kapteinis izmanto klasisko Arduino UNO ar CNC un diviem A4988 pakāpju motoru vadītājiem. Padeves motors ir savienots ar Z asi, bet liekšanas galvas motors - ar asi X. Draiveri ir konfigurēti pēc iespējas lielākai precizitātei - tiek ievietoti visi 3 džemperi zem pakāpju vadītājiem. Visam jābūt savienotam ar 12 V 3A barošanas avotu.

Astotais solis: programmaparatūra
Tagad jūs varat mēģināt iedarbināt mašīnu. Meistars izmanto GRBL kopā ar cncjs. Tie ir paredzēti darbam ar frēzmašīnu, taču lieliski darbojas jebkura veida CNC. GRBL ir programmaparatūra, kas jāinstalē Arduino UNO. Ir labs cncjs tīmekļa klients parametru iestatīšanai. Instalējiet GRBL datorā Arduino un cncjs.
Pēc instalēšanas jums ir jāpieslēdzas mašīnai un jāpārbauda tās darbība, nospiežot pogas Z +/- vai X +/-.
Tagad jums ir jākalibrē: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 USD 111 = 600 $ 112 = 1000 USD 120 = 500 USD 121 = 350 $ 122 = 350
Šī ir vērtību kopa, kas nosaka, kā pārveidot kodā norādīto skaitli motora kustībā. Piemēram, ja jūs iestatāt Z asi uz 30, tas faktiski nozīmē, ka viņš izbīdīs 30 mm vadu caur padevēju.
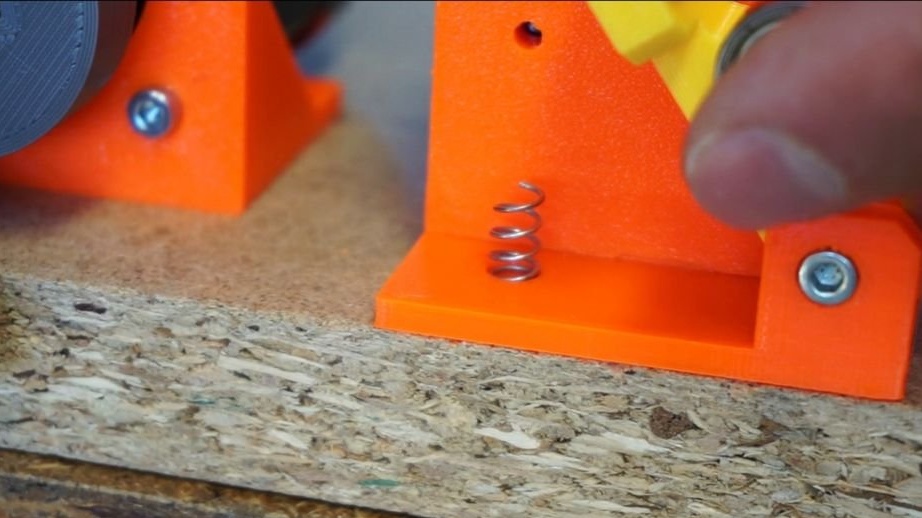
Mēs izdomājām kalibrēšanu, tagad jums jānoregulē liekšanas galva nulles stāvoklī.
Liekšanas galviņas kustību nosaka labi zināms fiksētais liekšanas galvas stāvoklis. Šajā gadījumā šī ir pozīcija, kurā galvas lieces tapa ir vērsta pa kreisi. Skatīt fotoattēlu.
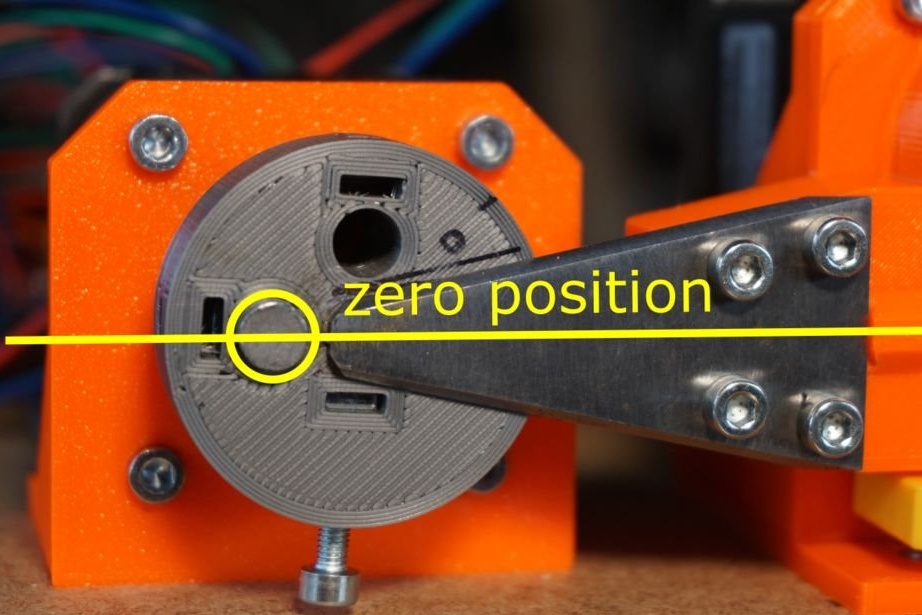
Ieteicams atzīmēt šo nulles stāvokli uz galvas, lai varētu to atgriezt tajā pašā stāvoklī. Nulles stāvokļa noteikšanai padeves mehānisms nav nepieciešams, jo tas vienmēr pārvietojas attiecībā pret pašreizējo stāvokli.
Tagad apskatīsim Gcode piemēru. Tas izskatās šādi:
G91
G1 Z1
G90
G1 X2
G1 X-6Lūk, par ko katra vērtība ir uzrakstīta:
G91 - izmanto relatīvās koordinātas (nepieciešams pirms katras kustības pa Z asi)
G1 Z1 - padodiet 1 mm vadu
G90 - izmantojiet absolūtās koordinātas (nepieciešams pirms katras kustības pa X asi)
G1 X2 - pagrieziet lieces galvu pozīcijā 2 (šim skaitlim nav vienību)
G1 X-6 - pagrieziet liekšanas galvu pozīcijā -6
Atkārtojot soļus 100 reizes, jūs iegūsit atsperes liekuma kodu. Vairāk avota failu var atrast zemāk.
hex-inner.gcode
heksa ārējais kods
spring.gcode
Mašīna ir gatava. Bet meistars joprojām strādās pie tā uzlabošanas.
Viss šādas mašīnas ražošanas process ir redzams video.