


Šajā rakstā Vednis mums parādīs, kā viņš izgatavoja Lego 60193 Arctic Air Transport helikopteru modeli kvadrocopters. Quadrocoptera ražošanā galvenais uzdevums papildus lidojošajām īpašībām bija saglabāt pēc iespējas vairāk oriģinālo detaļu.
Redzēsim īsu video, kurā parādīta kvadrocoptera darbība.
Tātad šāda kvadrocoptera ražošanā kapteinis izmantoja šādus
Instrumenti un materiāli:
-LEGO pilsētas arktiskais helikopters - 60193:
- kontrolieris un ESC 20x20 mm, piemēram, HGLRC XJB F428 Micro F4 AIO OSD;
- Bezkontakta motori - 4 gab.;
Propelleri
-Baterijas 950 mAh;
-Savienojumi;
-Vads;
-Radio modulis (raidītājs un uztvērējs);
-Stiprinājumi;
-Knifele;
-Kausēšanas dzelzs;
-Līmes pistole;
- skrūvgriezis;
-Drill;
Pirmais solis: Lego būvēt
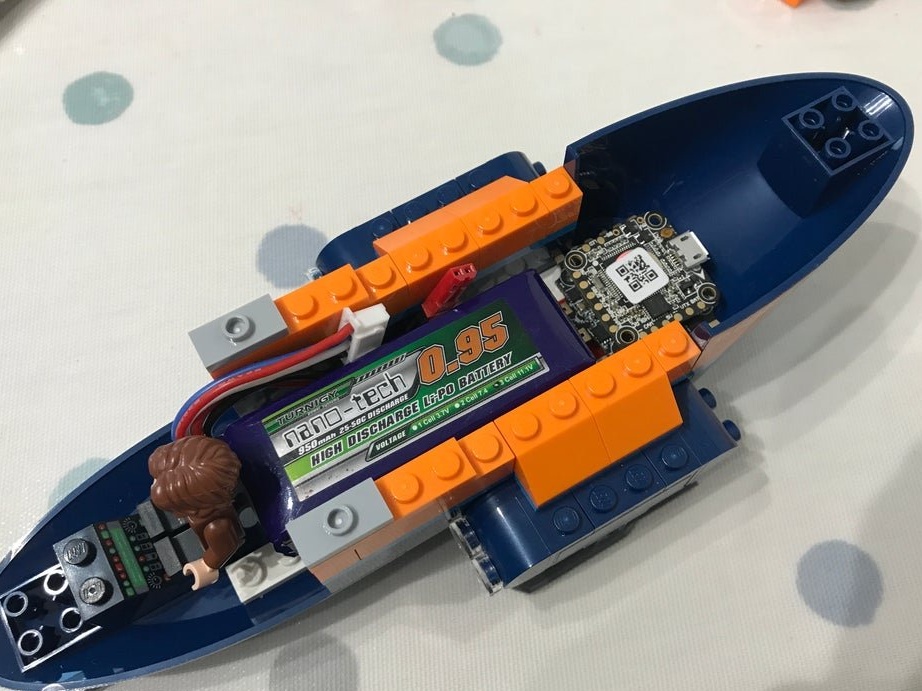
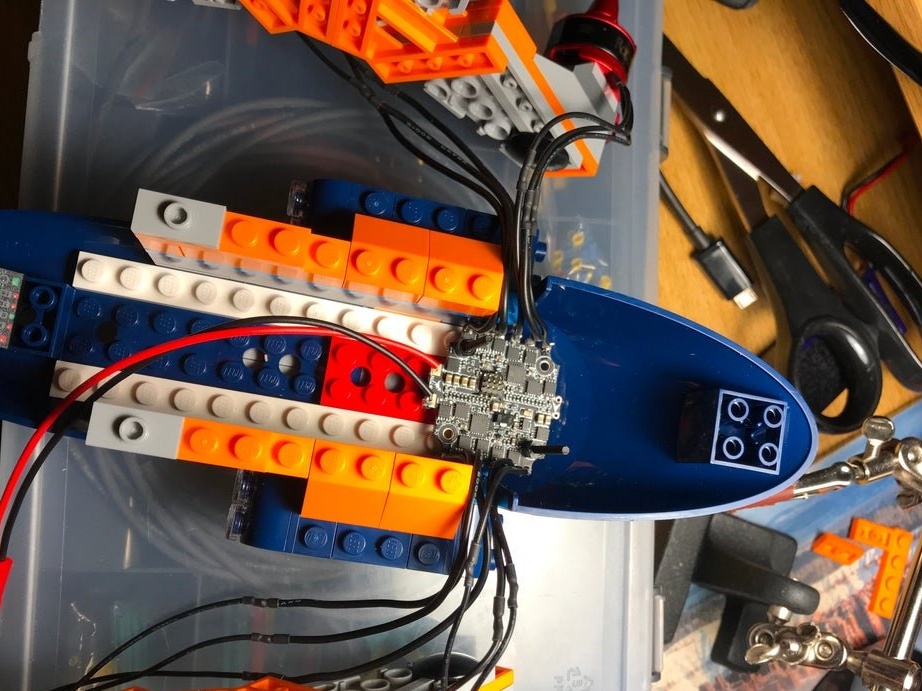
Pirmkārt, kapteinis savāc LEGO-Arctic. Tad modelis tiek daļēji izjaukts. Iekšpusē jums jāievieto akumulators un kontrolieris, ievērojot modeļa līdzsvarošanu.


Otrais solis: motora stiprinājums
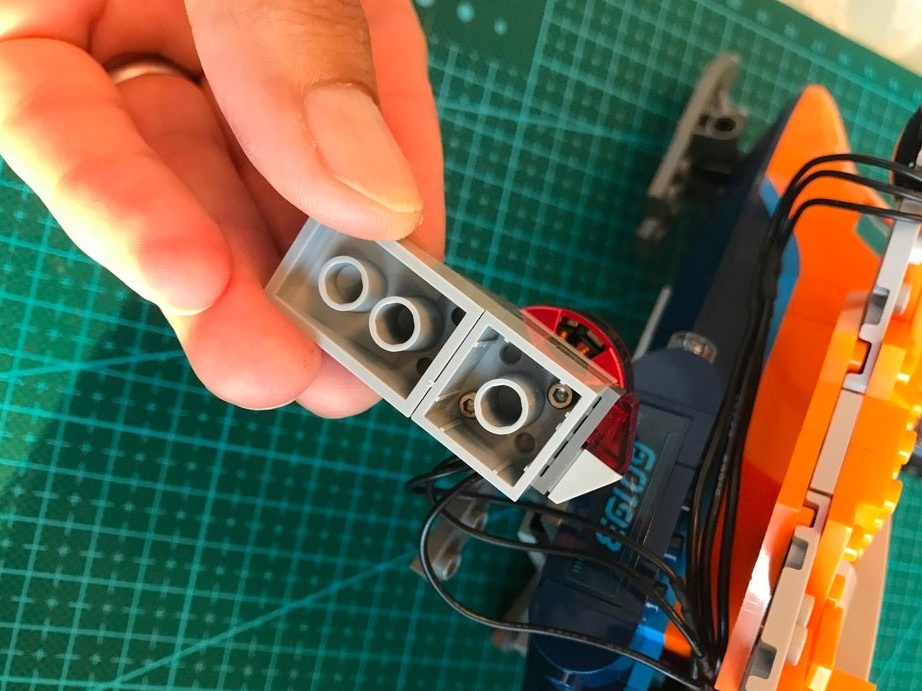
Standarta 1806 motora bez suku uzstādīšanas caurumi ir gandrīz tādi paši kā standarta LEGO 2x2 plāksnes stiprinājumiem. Katrā kvadriciktera “motora” stiprinājumā ir 2x2 tumši pelēka flīze (LEGO 3022) un 2x2 gaiši pelēka flīze ar vertikālu tapu (LEGO 2460), kas parasti tiek turēta uz LEGO dzenskrūves centriem.
Meistars urbj montāžas caurumus. Motoriem centrā ir bēgums. Flīžu centrā ir urbts caurums zem tā. Nodrošina motorus.








Trešais solis: pleci
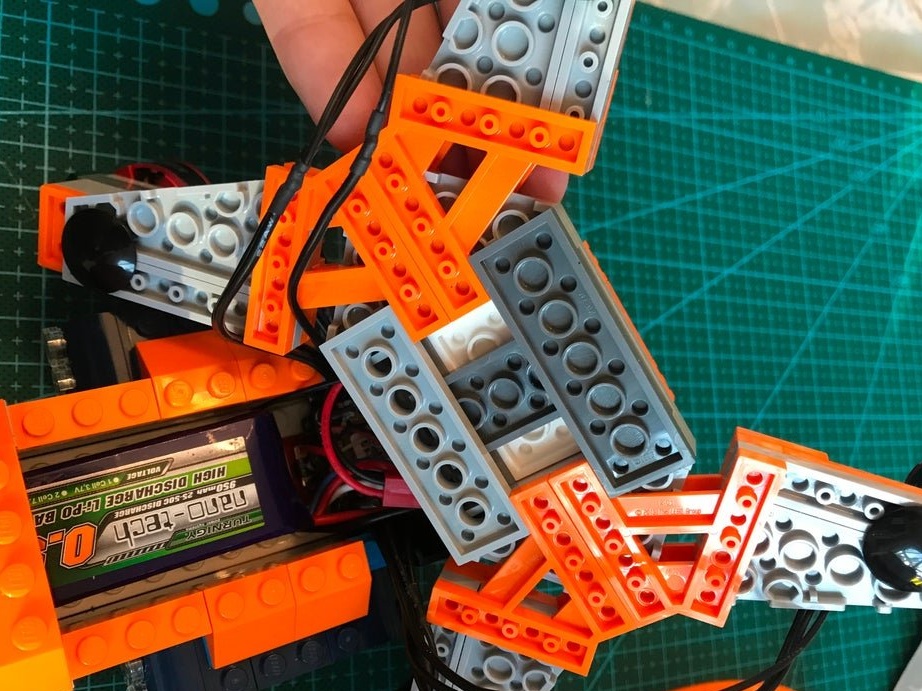
Pārkārtojot kvadrocoptera “plecus”, jūs varat nedaudz mainīt izkārtojumu, lai nodrošinātu plašāku vai šaurāku motoru izvietojumu un skrūvju izvietojumu attiecībā pret otru.
Standarta LEGO montāžai (pirmais foto) ir “pleci” un dzinēji, kas novietoti plati (horizontāli) ar diezgan lielu skrūvju pārklāšanos. Meistars pārveido “plecus” un izmet motoru un attiecīgi skrūves.



Ceturtais solis: elektronika
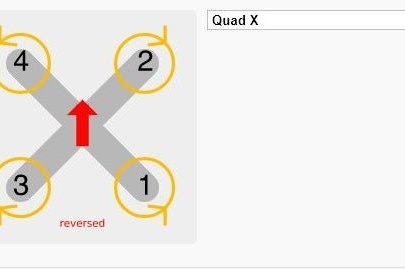
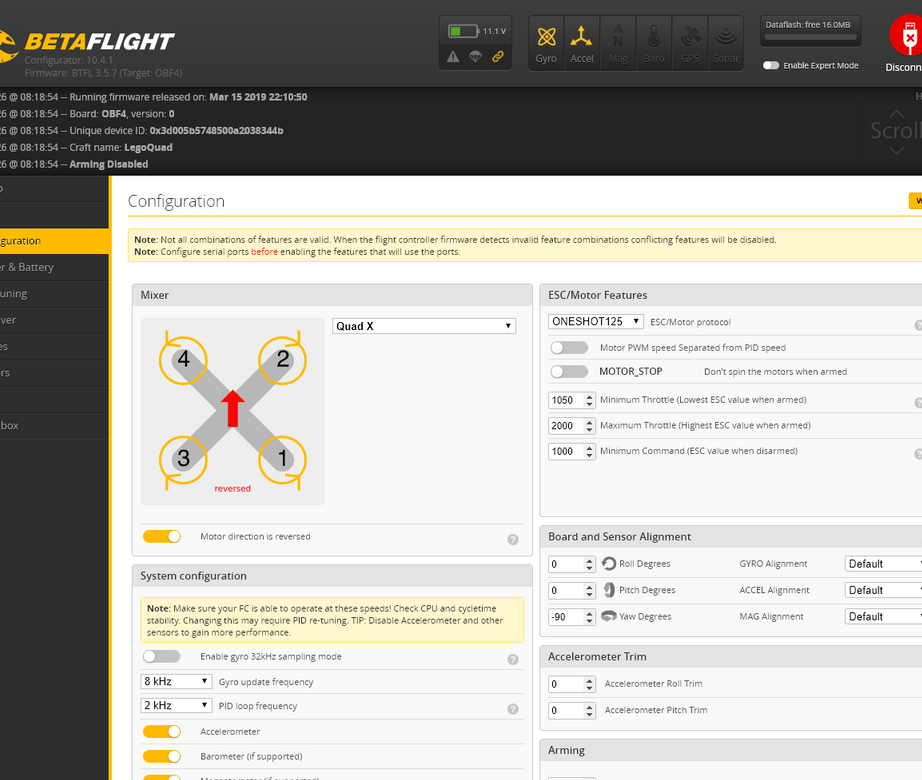
Saskaņā ar shēmu tas instalē elektroniku. Pirmajā fotoattēlā parādīta motoru griešanās virziena diagramma. Rotācijas virzienu var mainīt arī programmēšanas posmā.
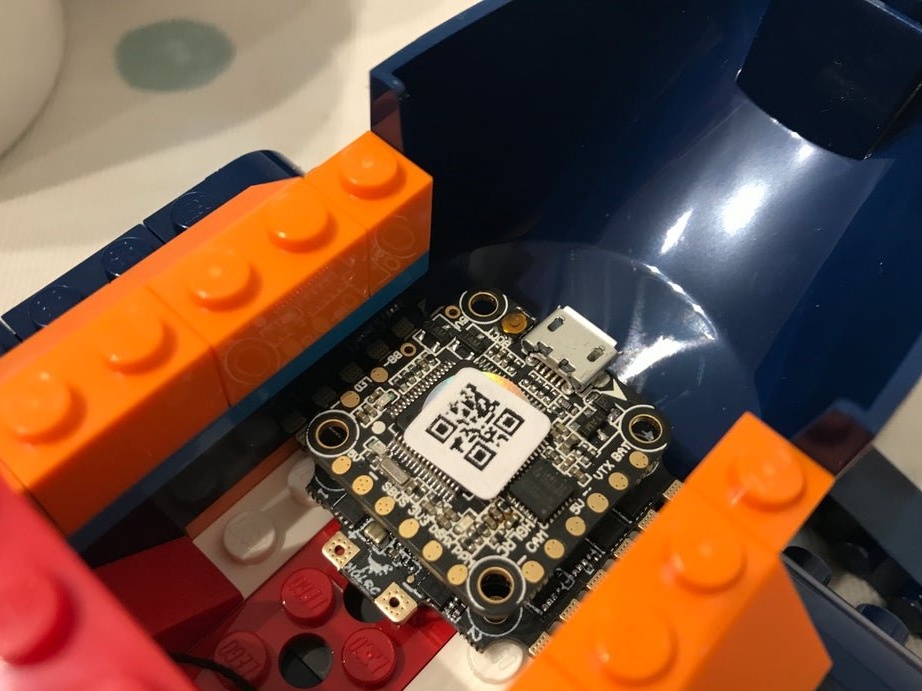
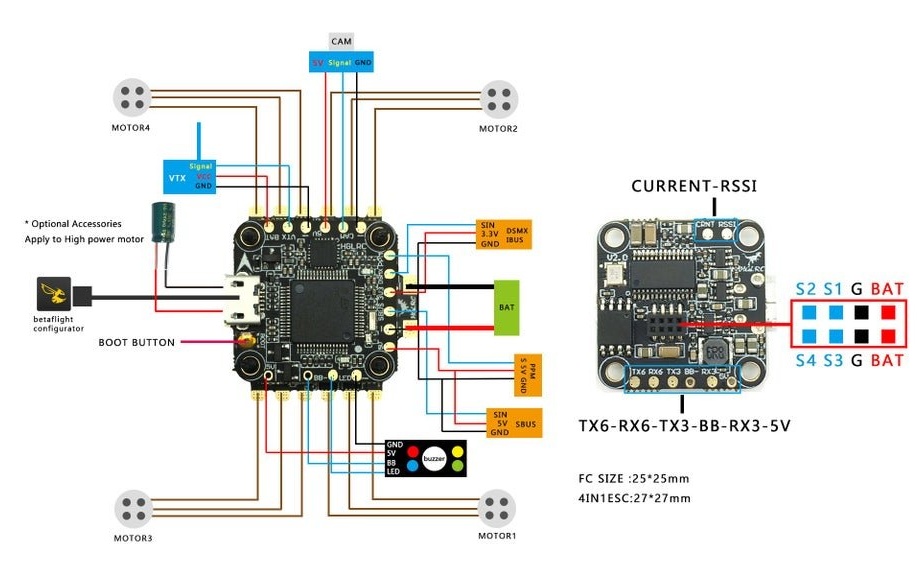

Pēc instalēšanas pabeigšanas un pirms akumulatora pievienošanas vednis pārbauda savienojumus, lai izvairītos no saplīšanas vai īssavienojuma.
Ieslēdzot strāvu, jums vajadzētu redzēt lidojuma kontroliera gaismas un dažus pīkstienus no ESC.
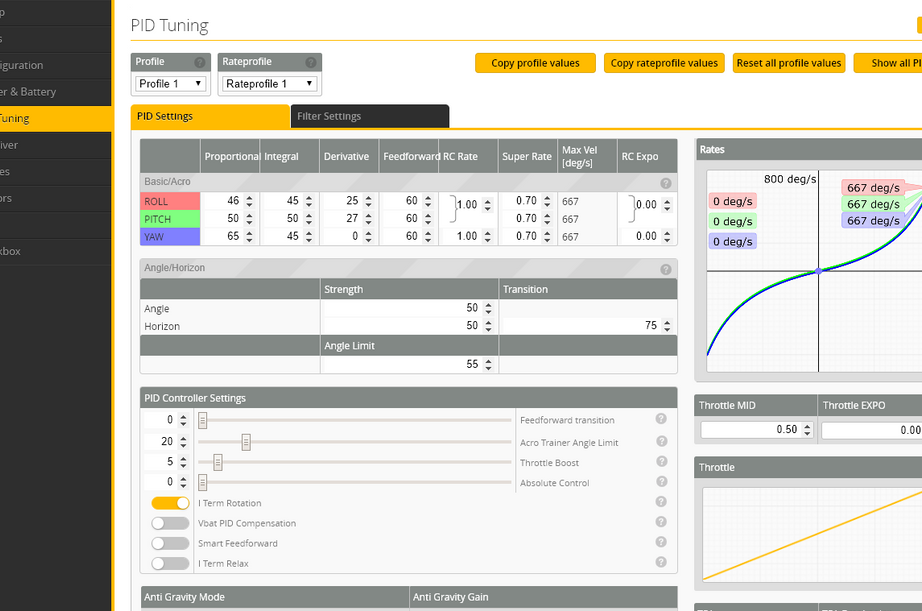
Piektais solis: iestatīšana
Tagad, kad viss ir savienots, ir pienācis laiks konfigurēt kontrolieri.Tas nozīmē programmatūras (iegultās programmatūras) lejupielādi, kas veic uzdevumu atšifrēt vadības signālus no RC raidītāja, apstrādā sensora ieejas signālu (paātrinātāju, žiroskopus) un nodrošina vadības signālus ESC, lai pagrieztu motorus noteiktā ātrumā.
Drošības nolūkos noņemiet dzenskrūves! Dažu pirmo iestatīšanas darbību laikā akumulators nav nepieciešams, tikai USB strāvas padeve.
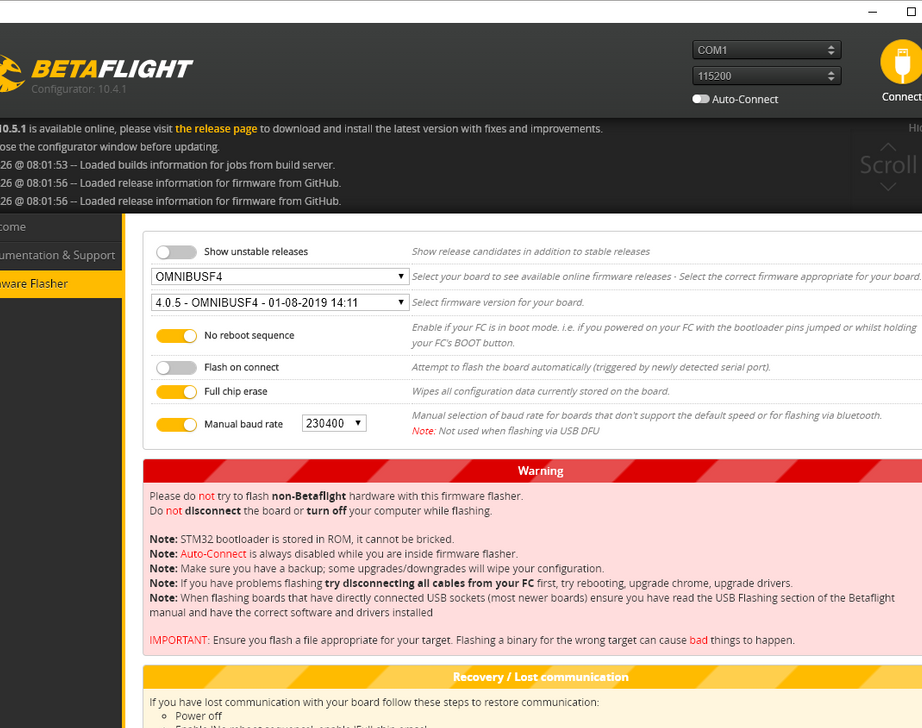
Lejupielādējiet Beta Configurator
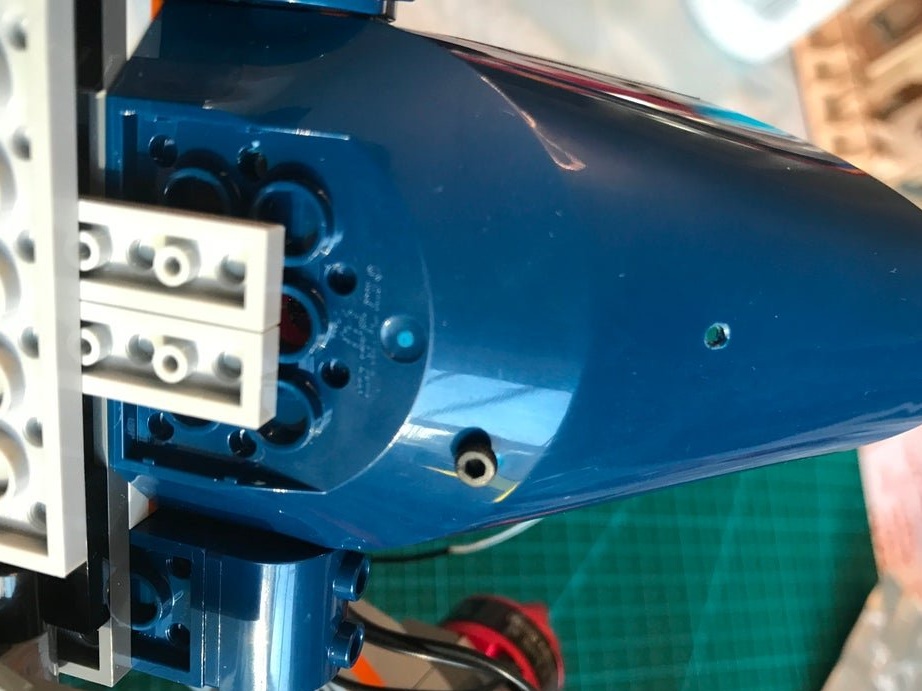
Pievienojiet mikro USB kabeli lidojuma kontrolierim. Lūdzu, ņemiet vērā, ka to var būt vieglāk izdarīt, ja regulators nav pieskrūvēts pie šasijas.
Lejupielādējiet un augšupielādējiet lidojuma kontrolierim atbilstošo programmaparatūru.
betaflight-settings-legoquad.txt
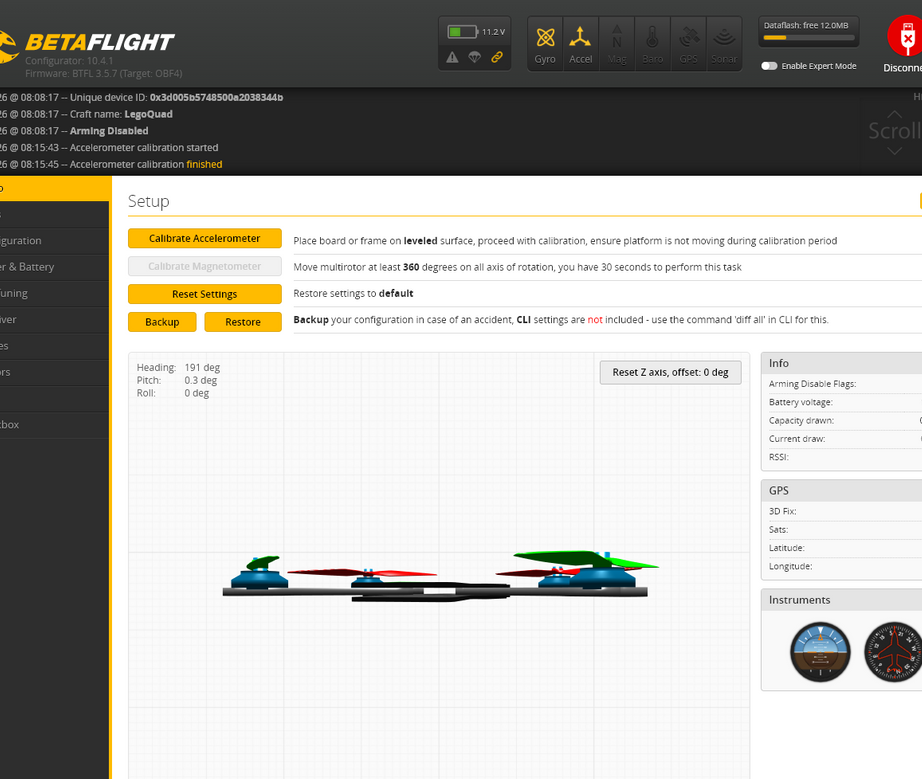
Noklikšķiniet uz pogas “Savienot” un konfigurējiet šādus iestatījumus:
1. Iestatīšana - dzinēju modeļa kalibrēšana
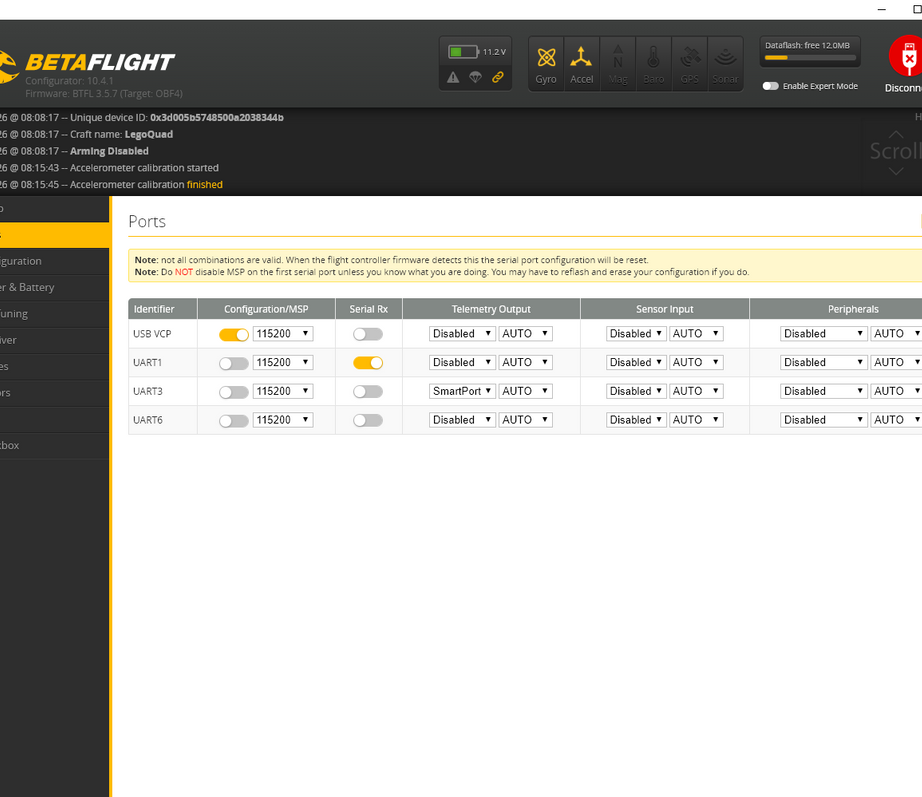
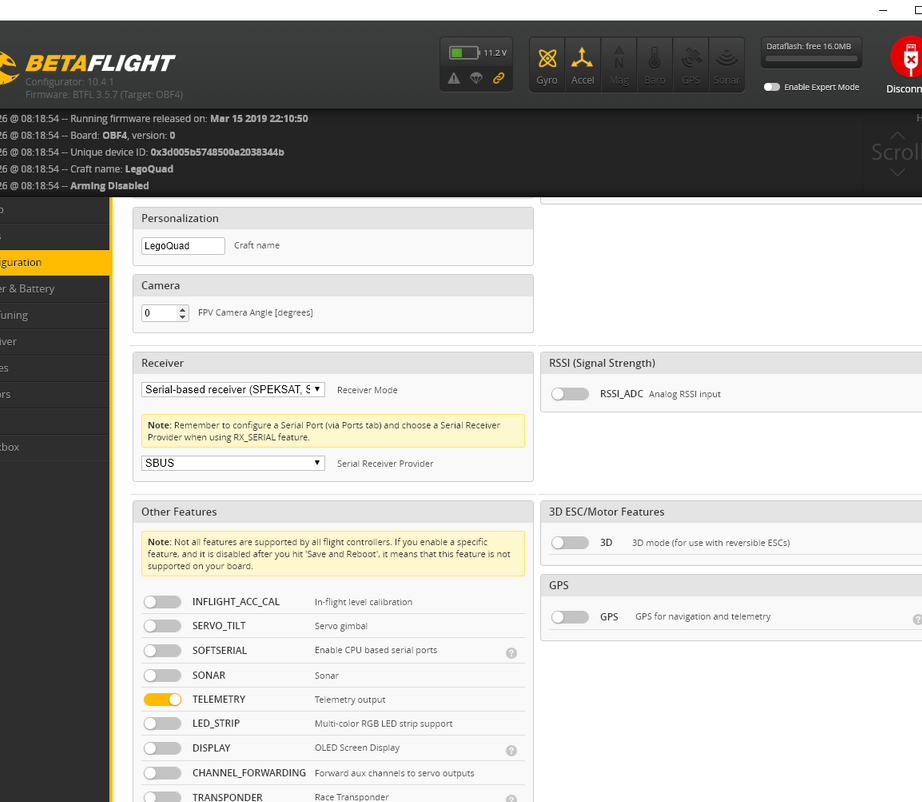
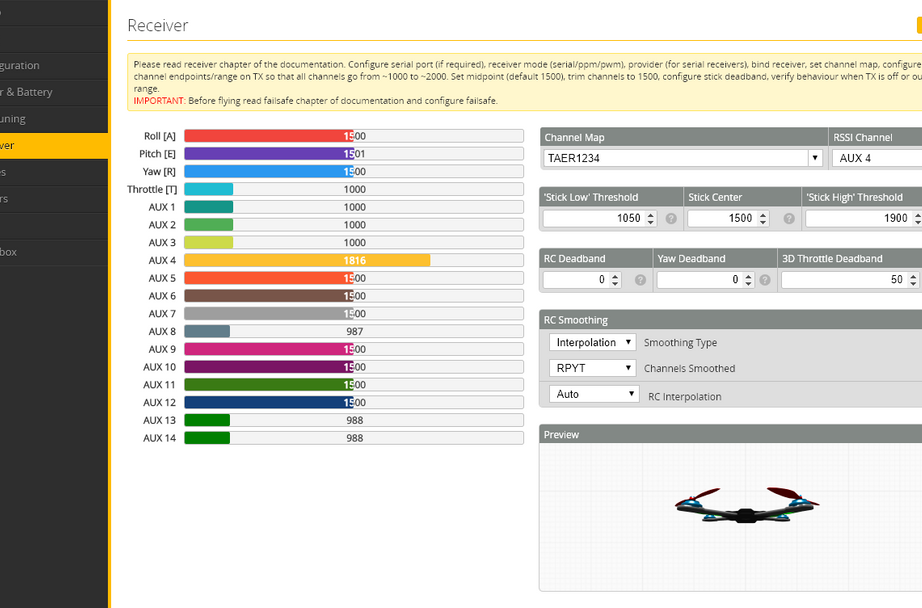
2. Norādiet ostas - UART1 - Sērijas RX SBUS RC uztvērēja pievienošanai
3. Saglabāšana un atsāknēšana
4. Izveidojiet savienojumu starp uztvērēju un raidītāju
5. Pārslodze
6. PID galvenā parametra vērtība ir 250
7 Pievienojiet akumulatoru
8. Pielāgojiet spriegumu.
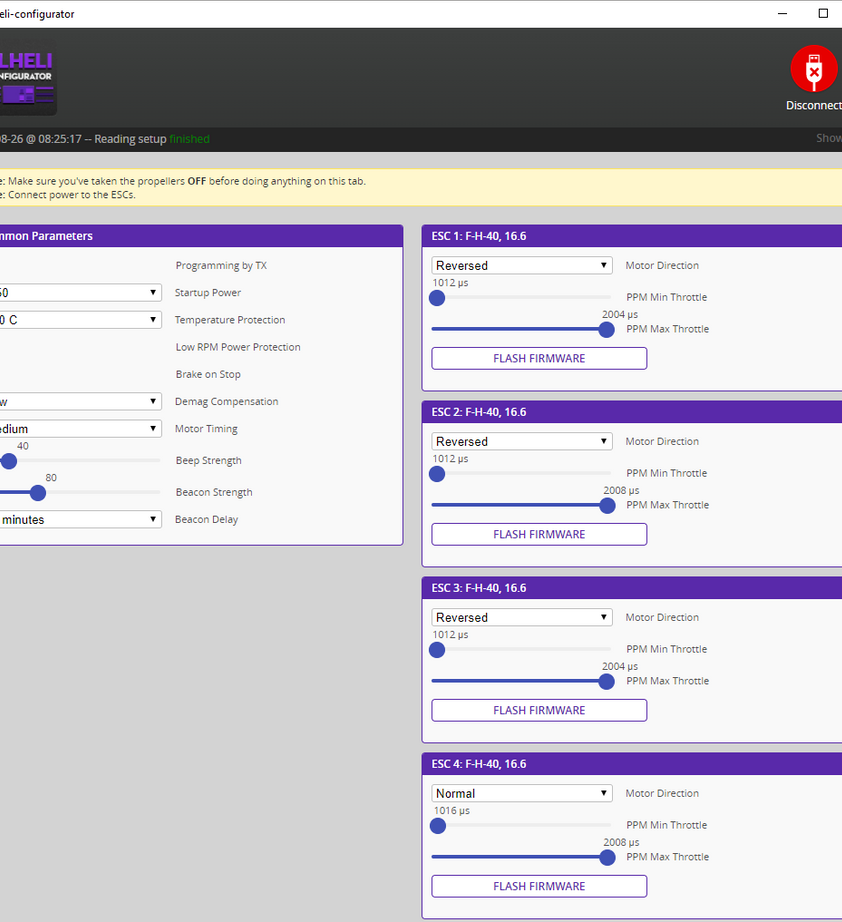
9. Pārliecinieties, vai kanāla displejs un vadības virziens ir pareizi. Kad viss ir iestatīts, kvadricikla modeļa attēlam labajā apakšējā stūrī jāpārvietojas visos pareizajos virzienos, pārvietojot kursorsviras uz RC regulatora.
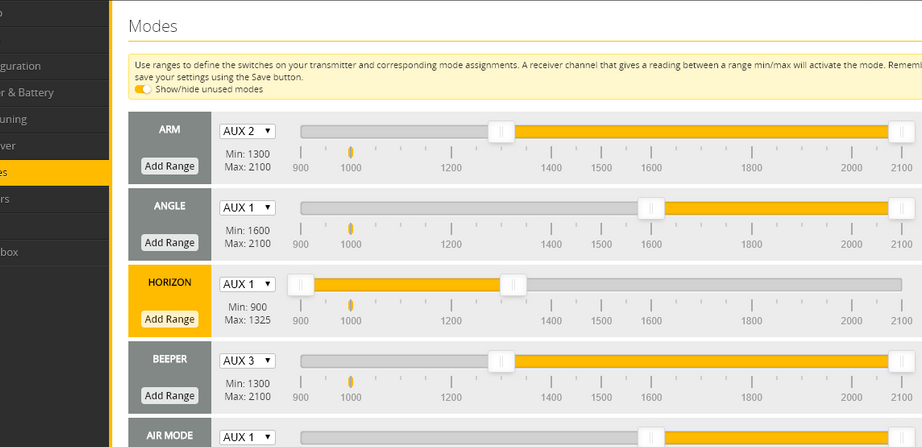
Konfigurē režīmus.
ARM ieslēgšana / izslēgšana
HORIZON pašlīmeņojošs / ACRO tradicionālajam FPV lidojumam
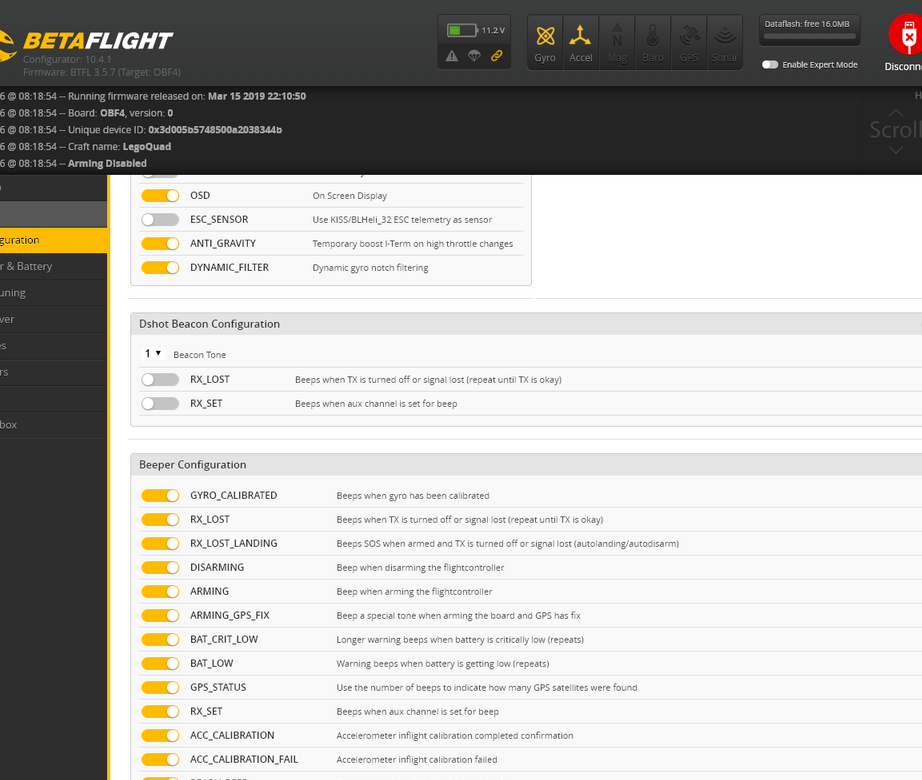
BEEPER - noderīgs, ja modeli pazaudējat garā zālē vai krūmos.
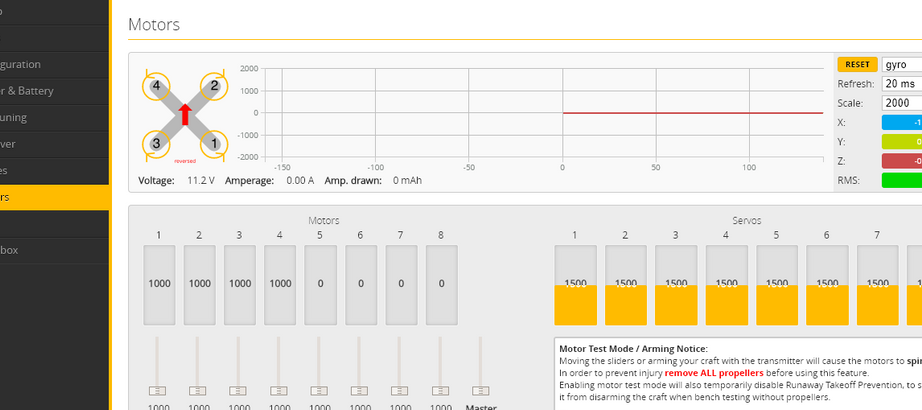
Cilne “Motors” - izmantojiet šo opciju, lai pārbaudītu katru motoru atsevišķi un, kas ir svarīgi, atzīmējiet katra no tiem griešanās virzienu
Izlabojiet nepareizo griešanās virzienu ar BLHELI konfigurētāju
Pēc visām šīm darbībām varat atvienot USB un akumulatoru, pēc tam ieslēgt strāvu un pārbaudīt, vai viss darbojas:
Ieslēdziet raidītāju un strāvu
Pievienojiet akumulatoru un uzstādiet kvadrocopteru uz līdzenas virsmas
Ieslēdziet ARM slēdzi, un motoriem vajadzētu sākt griezties ar nelielu ātrumu.
Pārbaudiet droseļvārstu, vienlaikus palielinot ātrumu
Horizontālajā režīmā mēģiniet noliekt kvadrocopteru un pārliecinieties, ka dzinēji reaģē atbilstoši, piemēram, nolieciet to uz priekšu, un priekšējie motori paātrināsies.

Sestais solis: galīgā asambleja
Praktiski visa lietas struktūra tiek turēta ar montāžas slēdzenēm. Kapteinis motoru uzstādīšanai izmanto tikai karstās kausēšanas līmi.


Viss ir gatavs, un jūs varat pārbaudīt.



