
Invertors 12–220 volti uz Arduino tīrā sinusa ar pilnu programmas kodu.
Teorija
Sinusoidālā viļņa izejas sasniegšana ir diezgan sarežģīta, un to nevar ieteikt invertoriem, jo elektroniska ierīcēm parasti nepatīk strauji pieaugošs strāvas vai spriegums. Tā kā invertorus galvenokārt ražo, izmantojot cietvielu elektroniskas ierīces, sinusoidālo viļņu formu parasti novērš.
Elektroniskās barošanas ierīces, strādājot ar sinusoidāliem viļņiem, dod neefektīvus rezultātus, jo ierīces, kā likums, tiek uzkarsētas salīdzinājumā ar taisnstūrveida impulsiem.
Tādējādi labākais risinājums sinusoidālā viļņa ieviešanai uz invertora ir PWM, kas nozīmē impulsa platuma modulāciju vai PWM.
PWM ir uzlabots eksponenciālās viļņu formas ekspozīcijas veids (digitālā versija), izmantojot proporcionāli mainīgus kvadrātveida impulsu platumus, kuru neto vērtību aprēķina precīzi atbilstoši izvēlētās eksponenciālās viļņu formas neto vērtībai, šeit "tīrā" vērtība attiecas uz RMS vērtību. Tāpēc aprēķināto PWM attiecībā pret konkrēto sinusoidālo viļņu var izmantot kā ideālu ekvivalentu dotā sinusoidāla viļņa atkārtošanai. Turklāt PWM būs ideāli saderīgi ar elektroniskām barošanas ierīcēm (mosfets, BJT, IGBTS) un ļaus tos izmantot ar minimālu karstumu.
Kas ir SPWM?
Visizplatītākā metode ir PWM sinhronā starojuma (sinusoidālā viļņa) vai SPWM iegūšana, piemērojot vairākus eksponenciāli mainīgus signālus operatīvā pastiprinātāja ieejai nepieciešamajai apstrādei. Starp diviem ieejas signāliem frekvencei vajadzētu būt daudz augstākai, salīdzinot ar otru.
Izmantojot divus ieejas signālus
Kā minēts iepriekšējā sadaļā, šī procedūra paredz divu eksponenciāli mainīgu signālu piegādi operatīvā pastiprinātāja ieejām.
Šeit operacionālais pastiprinātājs ir konfigurēts kā tipisks salīdzinātājs, tāpēc mēs varam pieņemt, ka operatīvais pastiprinātājs nekavējoties sāks salīdzināt šo divu uzlikto signālu momentānos sprieguma līmeņus brīdī, kad tie parādās vai tiek piemēroti tā ieejām.
Lai operatīvais pastiprinātājs pareizi izvadītu nepieciešamo sinusoidālo PWM pie tā izejas, ir nepieciešams, lai vienam no signāliem būtu daudz augstāka frekvence nekā otram. Lēnākā frekvence šeit ir tā, kurai vajadzētu būt parauga sinusoidālajam vilnim, ko imitē (atkārto) PWM.
Ideālā gadījumā abiem signāliem jābūt sinusoidāliem (viens ar augstāku frekvenci nekā otrs), tomēr to pašu var realizēt, iekļaujot trīsstūrveida viļņu (augstas frekvences) un sinusoidālo vilni (selektīvs vilnis ar zemu frekvenci). Kā redzams turpmākajos attēlos, augstfrekvences signāls vienmēr tiek padots uz operatīvā pastiprinātāja apgriezto ieeju (-), bet vēl viens lēnāks sinusoidālais signāls tiek piegādāts uz operācijas pastiprinātāja neinvertējošo (+) ieeju. Sliktākajā gadījumā abi signāli var būt trīsstūrveida viļņi ar ieteicamajiem frekvences līmeņiem, kā aprakstīts iepriekš. Tomēr tas palīdzēs sasniegt samērā labu PWM sinewave ekvivalentu.
Signālu ar augstāku frekvenci sauc par nesēja signālu, savukārt lēnāka parauga signālu sauc par modulējošu ieeju.
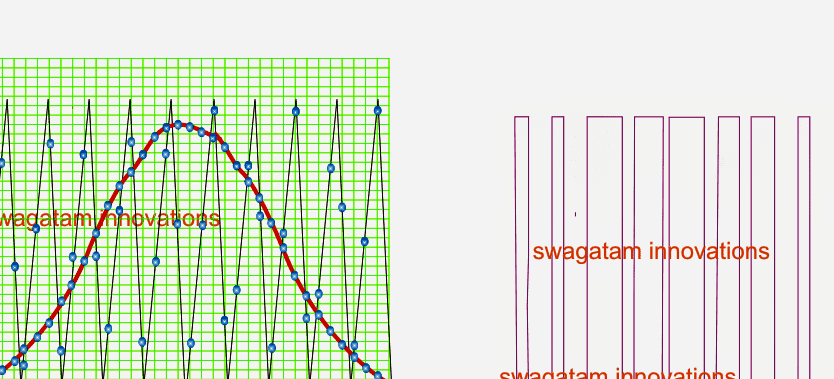
Izveidojiet SPWM ar trīsstūrveida un cīpslu vilni
Atsaucoties uz iepriekš minēto attēlu, caur attēlotajiem punktiem ir iespējams skaidri vizualizēt abu signālu dažādos sakritības vai pārklāšanās sprieguma punktus noteiktā laika posmā. Horizontālā ass parāda viļņu formas laika periodu, savukārt vertikālā ass parāda 2 vienlaicīgi darbojošos sprieguma līmeņus - viļņa formu. Attēlā ir norādīts, kā operatīvais pastiprinātājs reaģēs uz parādītajiem divu signālu momentānajiem sprieguma līmeņiem un izvadē attiecīgi mainīgu sinusoidālu PWM. Darbības pastiprinātājs (op-amp) vienkārši salīdzina, strauja trīsstūra viļņa sprieguma līmeņus uzreiz maina sinusoidālo vilni (tas var būt arī trīsstūra vilnis), un pārbauda gadījumus, kad trīsstūra viļņu formas spriegums var būt zemāks par sinusoidālā viļņa spriegumu un reaģē nekavējoties izveidojiet augstu loģiku izejām.
Tas tiek uzturēts tik ilgi, kamēr trīsstūra potenciālais vilnis turpina būt zemāks par sinusa viļņa potenciālu, un brīdī, kad tiek noteikts, ka sinusa viļņa potenciāls ir mazāks par trīsstūra viļņa momentāno potenciālu, izejas atgriežas ar minimumu un iztur, līdz situācija atkārtojas.
Šis nepārtrauktais divu savstarpēji pārklāto viļņu formu potenciālo līmeņu salīdzinājums pie diviem operatīvā pastiprinātāja ieejām noved pie attiecīgi mainīgu PWM, kas var precīzi atkārtot sinusoidālo formu, kas piemērota operējamā pastiprinātāja neinversajai ieejai.
Darbības pastiprinātājs un SPWM
Nākamais attēls parāda modelēšana iepriekšminētā darbība:
Šeit mēs varam novērot, kā tas tiek īstenots praksē, un tas ir tas, kā operētājsistēmas pastiprinātājs darīs to pašu (lai arī ar daudz lielāku ātrumu, MS).
Darbība ir diezgan acīmredzama un skaidri parāda, kā operatīvajam pastiprinātājam jāapstrādā PWM sinusoidālais vilnis, salīdzinot divus vienlaicīgi mainīgus signālus pie tā ieejām, kā aprakstīts iepriekšējās sadaļās.
Faktiski operatīvais pastiprinātājs sinusoidālo PWM apstrādā daudz precīzāk nekā iepriekš parādītā simulācija, tas var būt 100 reizes labāks, izveidojot ārkārtīgi vienveidīgu un labi izmērītu PWM, kas atbilst piegādātajam paraugam. Sinusa vilnis.
Arduino invertora divas shēmas
detaļu saraksts
Visi 1/4 vatu rezistori, 5% CFR
• 10K = 4
• 1K = 2
• BC547 = 4gab
• MOSFET IRF540 = 2 gab
• Arduino UNO = 1
• Transformators = 9-0-9V / 220V / 120V.
• Akumulators = 12 V
Visi 1/4 vatu rezistori, 5% CFR
• 10K = 4
• 1K = 2
• BC547 = 4gab
• MOSFET IRF540 = 2 gab
• Arduino UNO = 1
• Transformators = 9-0-9V / 220V / 120V.
• Akumulators = 12 V
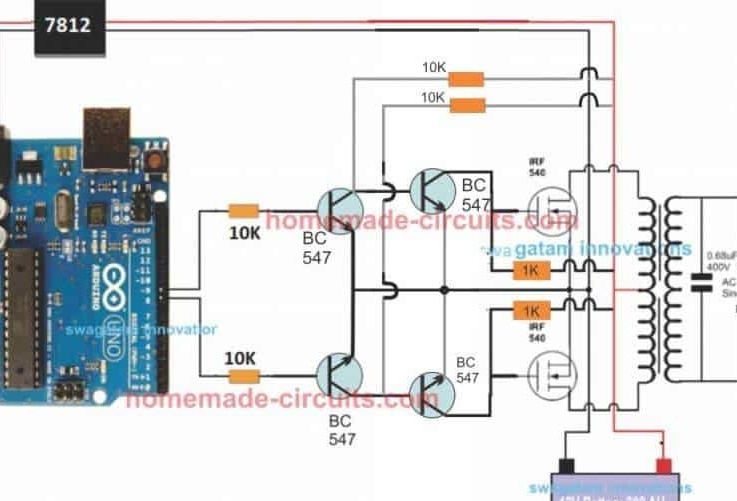
Dizains faktiski ir ļoti vienkāršs, kā parādīts nākamajā attēlā.
8. un 8. piespraude izveido pārmaiņus PWM un pārslēdz Mosfets ar to pašu PWM.
Mosfet savukārt, izmantojot akumulatora jaudu, uz transformatora inducē SPWM viļņu formu, piespiežot transformatora sekundāro daļu radīt identisku viļņu formu.
Piedāvāto Arduino invertora ķēdi var uzlabot līdz jebkuram vēlamajam augstākam jaudas līmenim, attiecīgi attiecīgi vienkārši aizstājot Mosfets un transformatoru, kā alternatīvu varat to pārveidot arī par pilna tilta vai H-tilta sinusoidālo viļņu invertoru.
Arduino valdes spēks
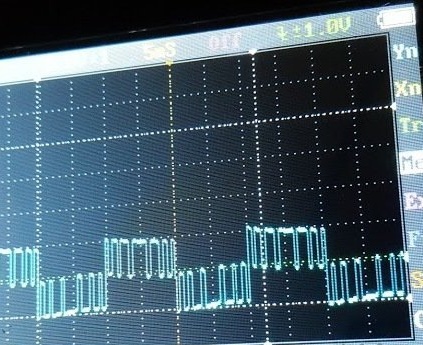
Viļņu formas attēli Arduino SPWM
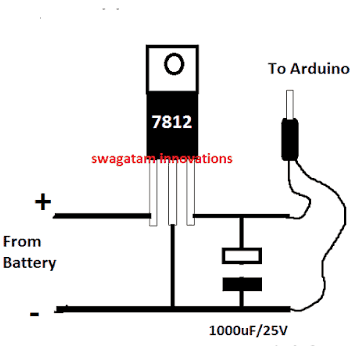
Tā kā Arduino ražos 5 V izvadi, tas, iespējams, nav ideāls tiešai MOS tranzistoru vadībai.
Tāpēc ir nepieciešams paaugstināt strobo līmeni līdz 12 V, lai Mosfets darbotos pareizi bez sildīšanas ierīcēm.
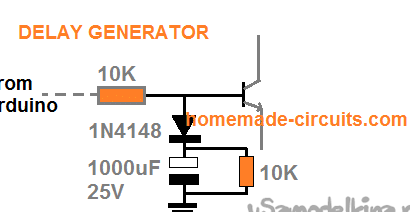
Lai pārliecinātos, ka Mosfety nesākas, kad Arduino sākas vai sākas, jums jāpievieno sekojošais aizkaves ģenerators un jāpievieno tam BC547 tranzistoru pamatnē: Tas aizsargās Mosfets un neļaus tiem izdegt strāvas slēdža laikā un kad Arduino sāk darboties.
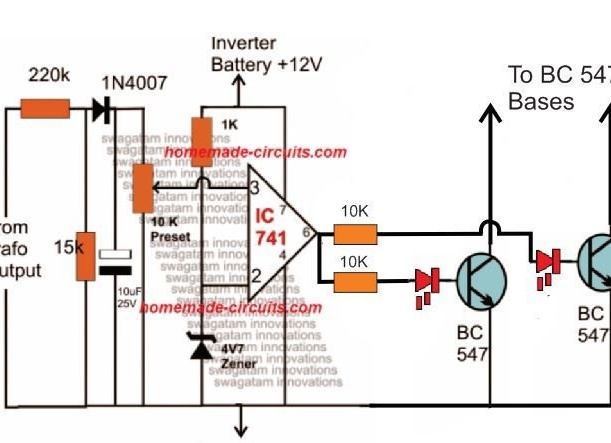
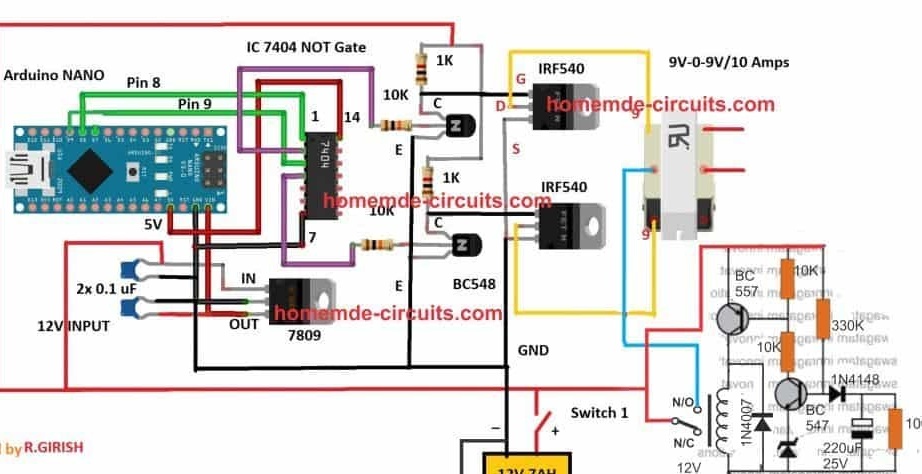
Automātiskā sprieguma regulatora pievienošana
Tāpat kā uz jebkura cita invertora, šī dizaina izejā strāva var pieaugt līdz nedrošām robežām, kad akumulators ir pilnībā uzlādēts.
Lai to kontrolētu, pievienojiet automātisko sprieguma regulatoru.
BC547 kolektoriem jābūt savienotiem ar kreisā BC547 pāra pamatnēm, kuras ar 10K rezistoriem ir savienotas ar Arduino.
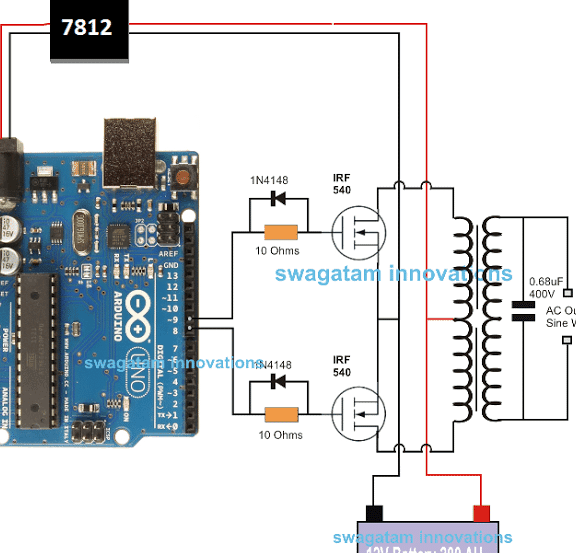
Invertora otrā versija, izmantojot mikroshēmu sn7404 / k155ln1
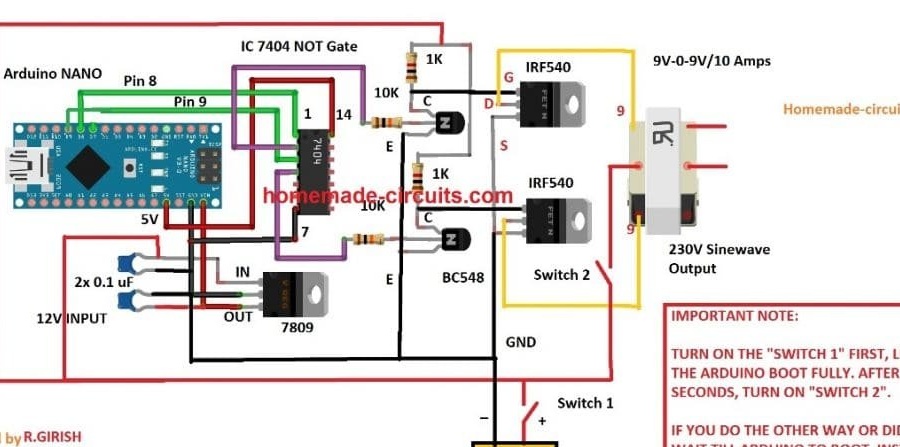
Svarīgi:
Lai izvairītos no nejaušas ieslēgšanas pirms Arduino iekraušanas, iepriekšminētajā dizainā var iekļaut vienkāršu taimera ķēdes aizkavēšanos, kā parādīts zemāk:
Programmas kods:
/ *
Šī koda pamatā bija Swagatam SPWM kods ar izmaiņām, kas veiktas, lai noņemtu kļūdas. Izmantojiet šo kodu tāpat kā citus Swagatam darbus.
Atton risks 2017
* /
const int sPWMArray [] = {500,500,750,500,1250,500,2000,500,1250,500,750,500,500}; // Tas ir masīvs ar SPWM vērtībām, kas tās maina pēc vēlēšanās
const int sPWMArrayValues = 13; // Jums tas ir vajadzīgs, jo C nedod masīva garumu
// Tapas
const int sPWMpin1 = 10;
const int sPWMpin2 = 9;
// Tapa pārslēdzas
bool sPWMpin1Status = true;
bool sPWMpin2Status = true;
iestatīšana nav spēkā ()
{
pinMode (sPWMpin1, OUTPUT);
pinMode (sPWMpin2, OUTPUT);
}
tukšs cilpa ()
{
// 1. cilpas cilpa
for (int i (0); i! = sPWMArrayValues; i ++)
{
if (sPWMpin1Status)
{
digitalWrite (sPWMpin1, HIGH);
kavēšanāsMikrosekundēs (sPWMArray [i]);
sPWMpin1Status = nepatiess;
}
cits
{
digitalWrite (sPWMpin1, LOW);
kavēšanāsMikrosekundēs (sPWMArray [i]);
sPWMpin1Status = patiess;
}
}
// 2. tapas cilpa
for (int i (0); i! = sPWMArrayValues; i ++)
{
if (sPWMpin2Status)
{
digitalWrite (sPWMpin2, HIGH);
kavēšanāsMikrosekundēs (sPWMArray [i]);
sPWMpin2Status = nepatiess;
}
cits
{
digitalWrite (sPWMpin2, LOW);
kavēšanāsMikrosekundēs (sPWMArray [i]);
sPWMpin2Status = patiess;
}
}
}Lai veicas.