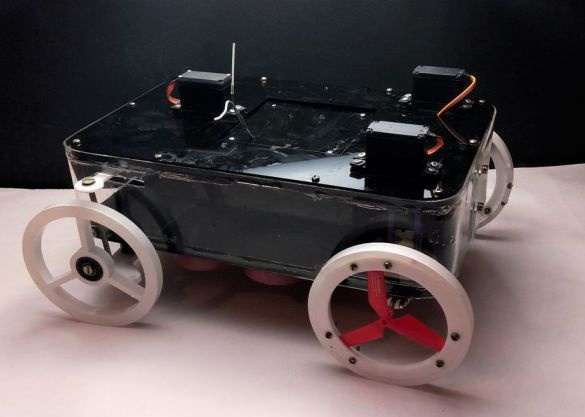



Šajā rakstā mēs apskatīsim Indijas amatnieku izgatavotu visurgājēju, kas pārvietojas gan uz sauszemes, gan uz ūdens. Visurgājējs sastāv no peldošas platformas ar riteņiem un propellera. Mehānismus kontrolē ar tālvadības pulti, izmantojot Arduino UNO.
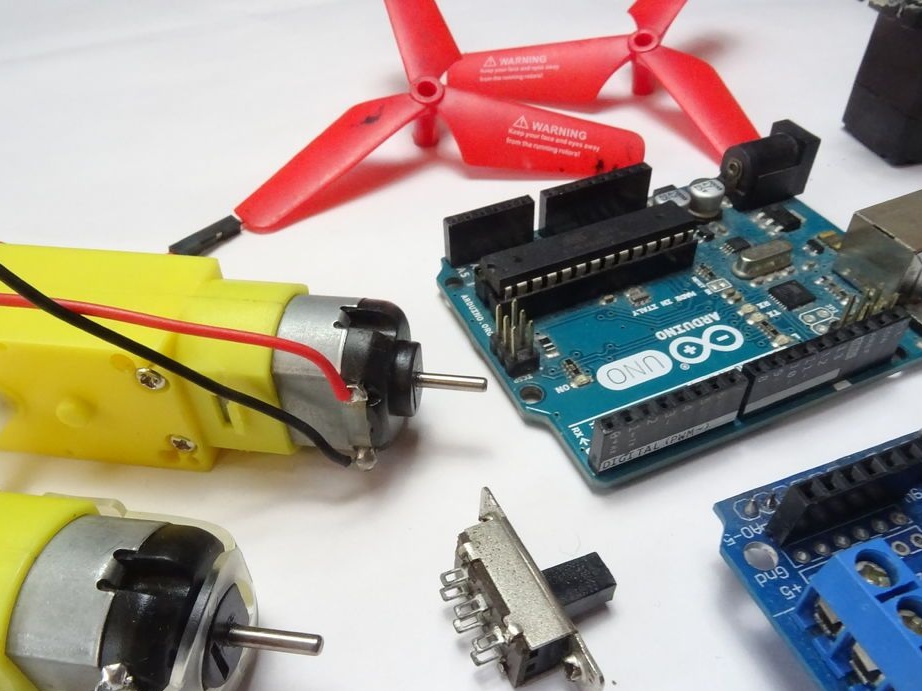
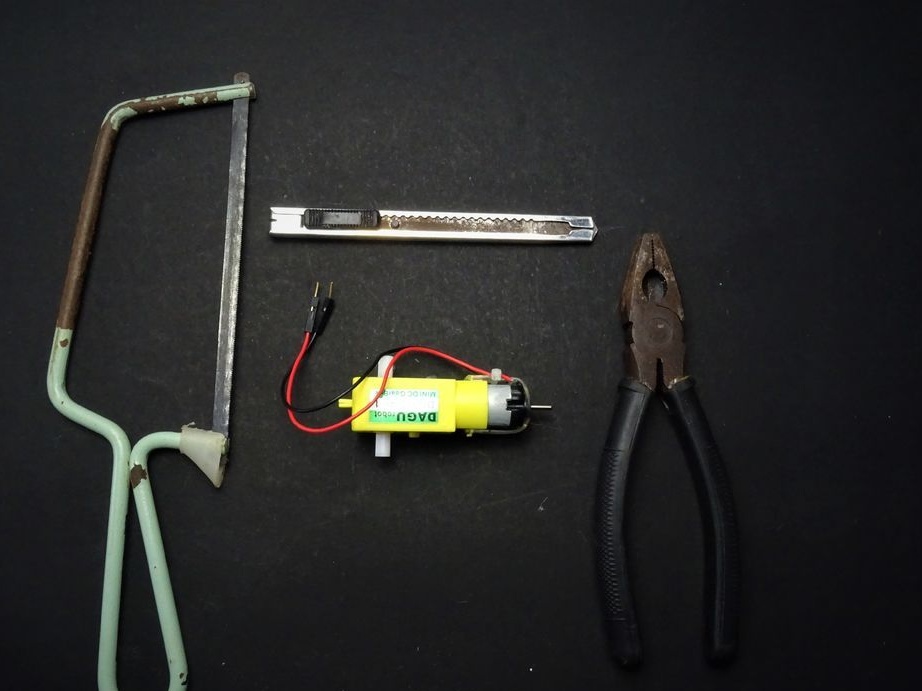
Instrumenti un materiāli:
-
-AKB 9V;
-Slēdzis;
-Akrils;
-Saplāksnis;
(ar atsauci gultnis ir 8 x 16 x 5 mm, autors norāda 8 * 22 mm)
-Divas dzenskrūves;
-Stiprinājumi;
-Pludiņi;
-Līmes pistole;
-Super līme;
Epoksīdsveķi;
-Kausēšanas dzelzs;
-Drill;
-Lāzera griezējs;
-Savu;
- skrūvgriezis;
-Drill;
-Kausēšanas dzelzs;
-Valde;
-Dators ar programmatūru;


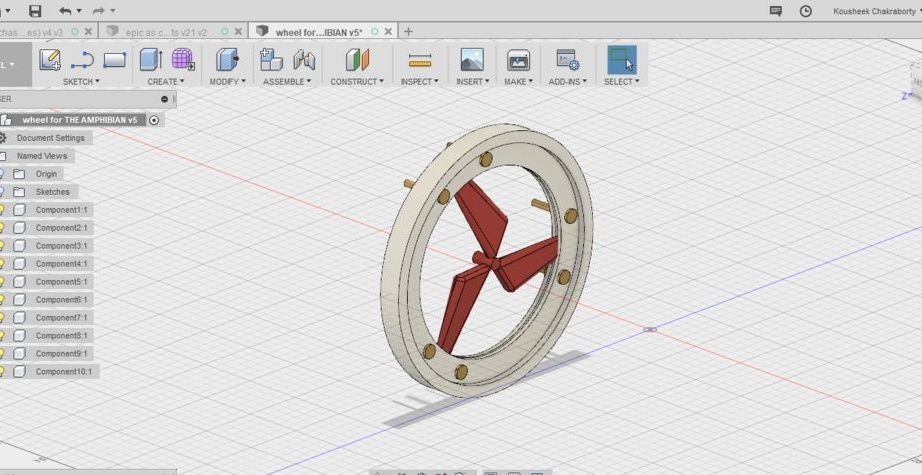
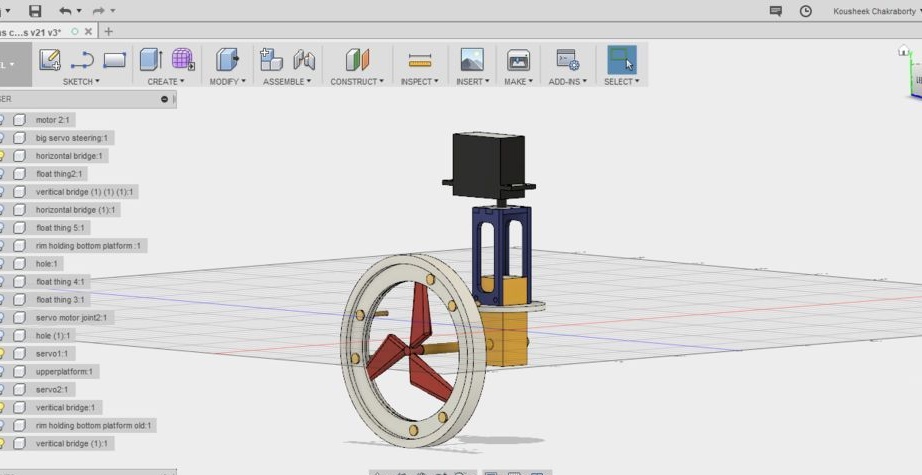
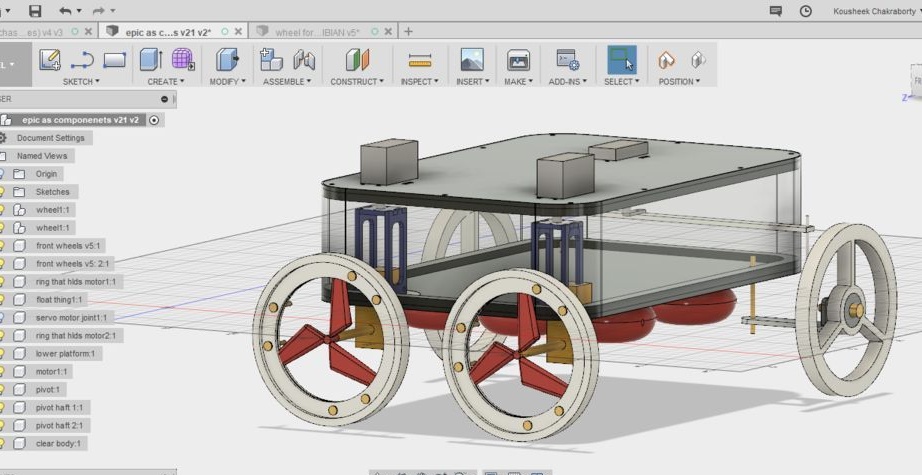
Pirmais solis: dizains
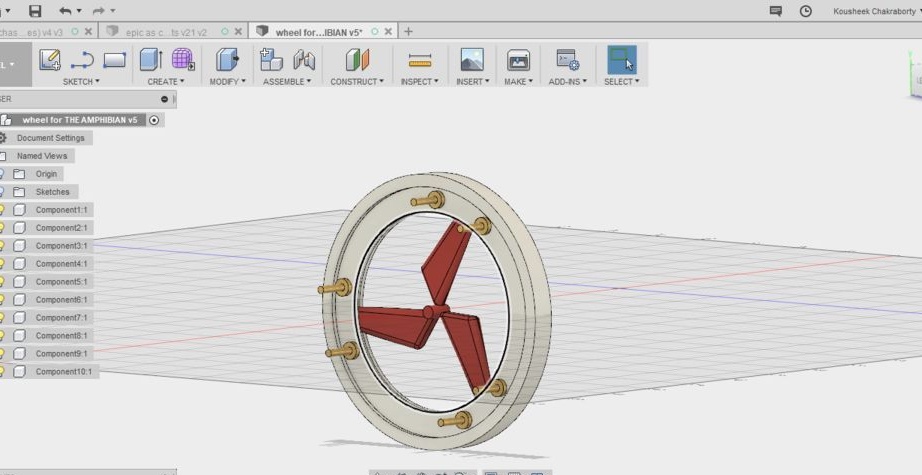
Projekta izveidošanai meistari izmantoja programmu Fusion 360. Visas grūtības bija apvienot pārvietošanos uz sauszemes un ūdenī. Projektējot riteņus, meistari izstrādāja sistēmu, kurā skrūves atvērsies ūdenī, bet, ņemot vērā konstrukcijas sarežģītību, viņi vienkārši integrēja dzenskrūves no bērnu rotaļlietas riteņa iekšpusē. Tas ļauj riteņiem visurgājēju pārvietot uz sauszemes, un, nonākot ūdenī, skrūves tiek ieslēgtas.
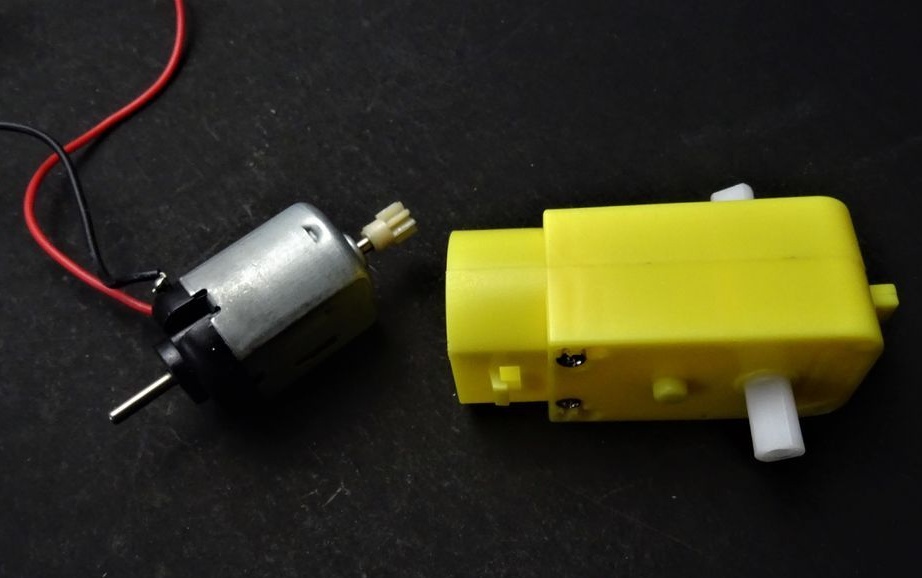
Lai īstenotu šo ideju, braucot pa ūdeni, jums jāspēj pagriezt aizmugurējos riteņus perpendikulāri visurgājējam. Tas kļuva iespējams, kad motora pārnesumus izņēma no rāmja. Plastmasas pārnesumkārbas un ūdens, kas tajās nonāk, nekaitēs.
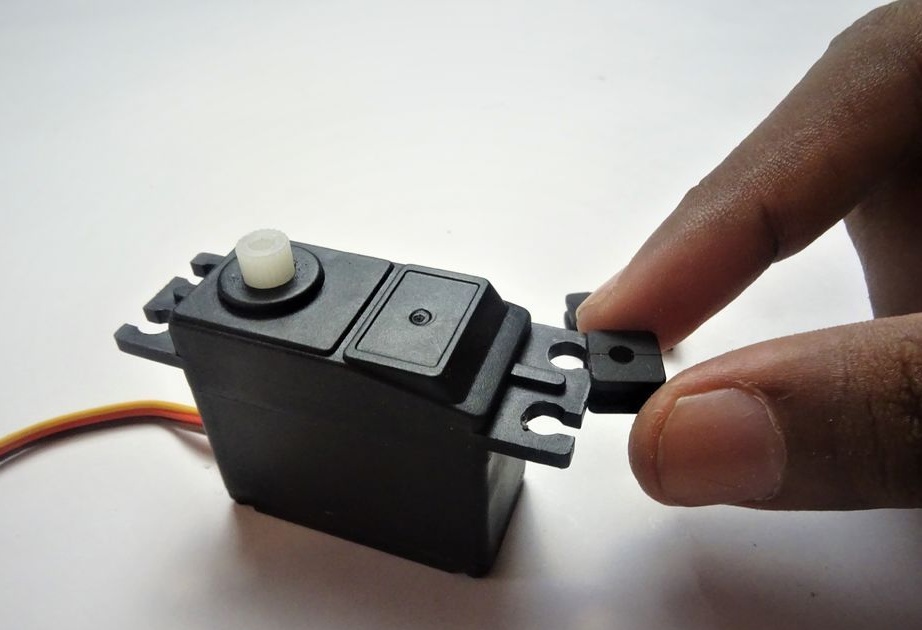
Riteņu skrūvju pagriešana tiks veikta, izmantojot servopiedziņu.
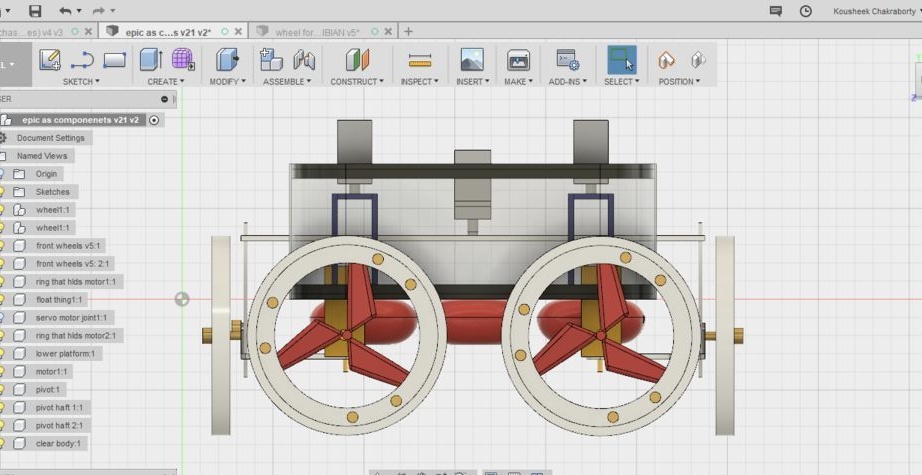
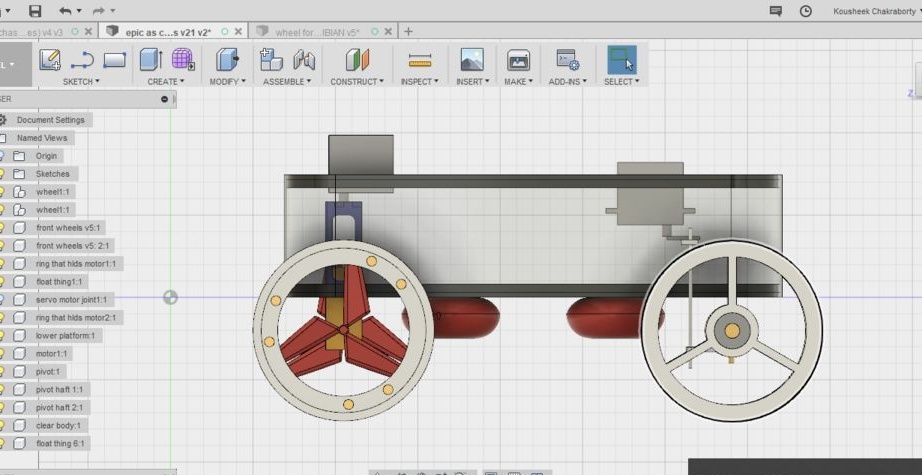
Visurgājējam ir divi pagrieziena mehānismi. Viens, lai kontrolētu dzenskrūvju aizmugurējos riteņus ūdenī, un otrais, lai vadītu sauszemes, kontrolē priekšējos riteņus. Priekšējo riteņu griešanās leņķis ir 35 grādi, kas ļauj veikt asus pagriezienus.
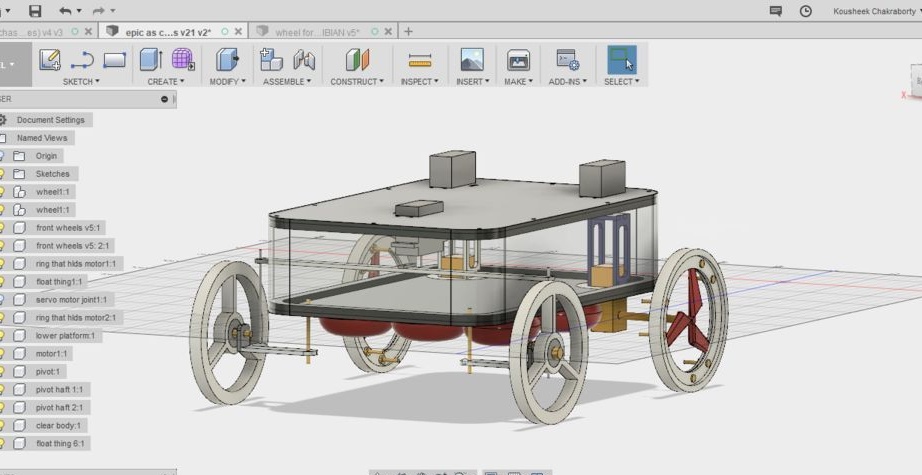
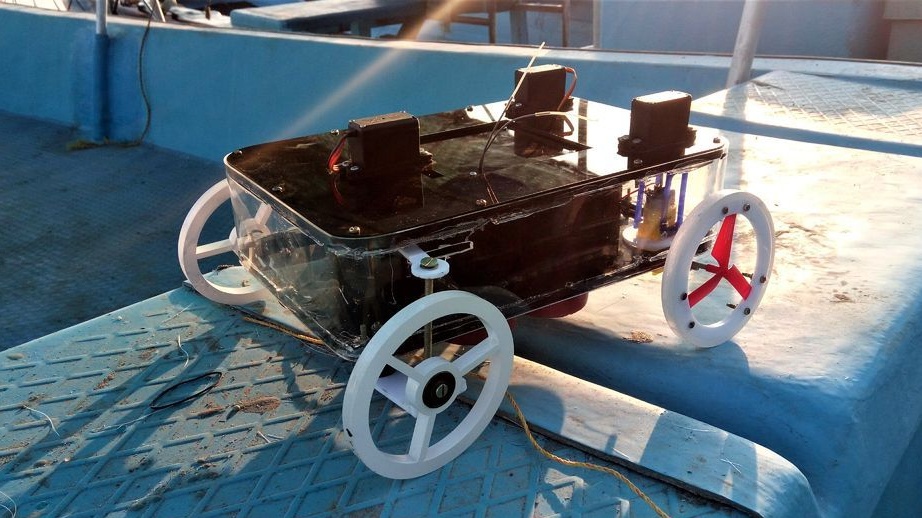
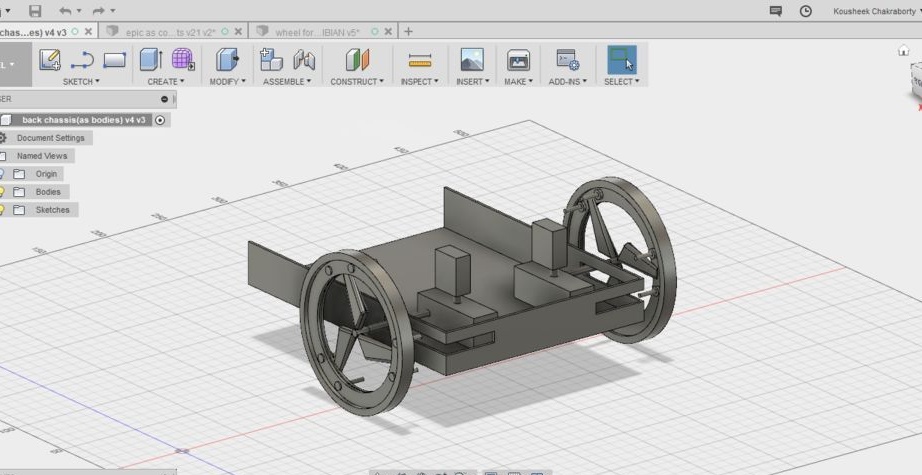
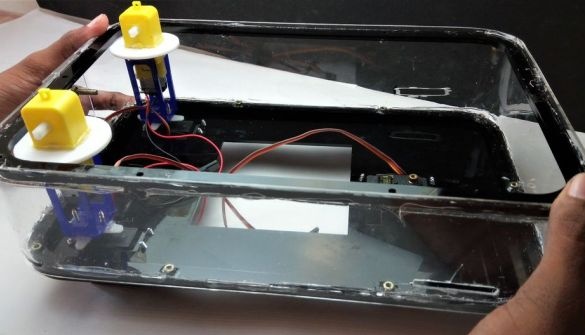
Zemāk redzamajos attēlos varat redzēt visurgājēja pārveidi, pārvietojoties pa zemi un ūdeni.
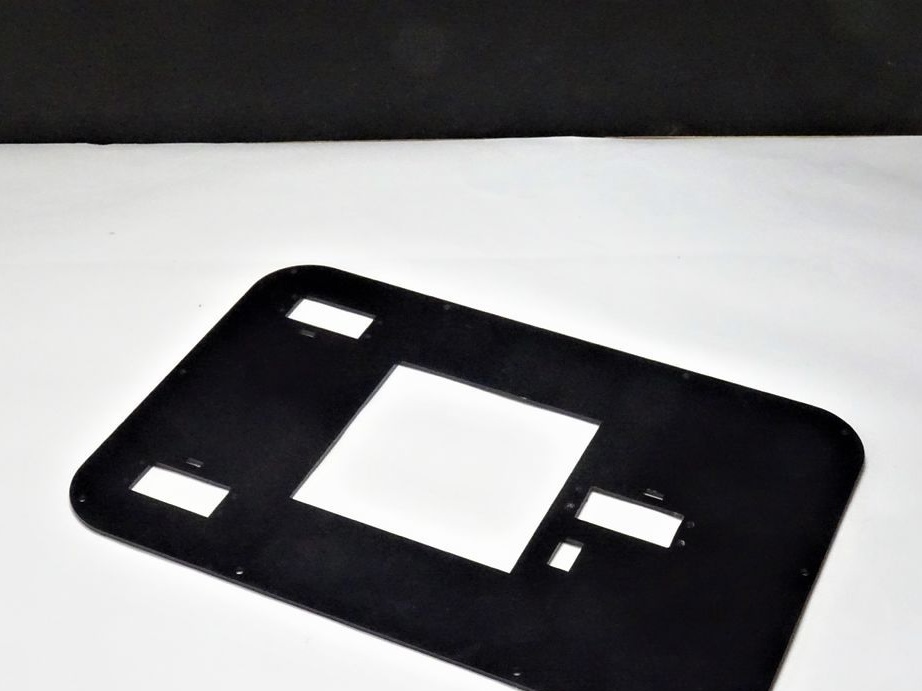
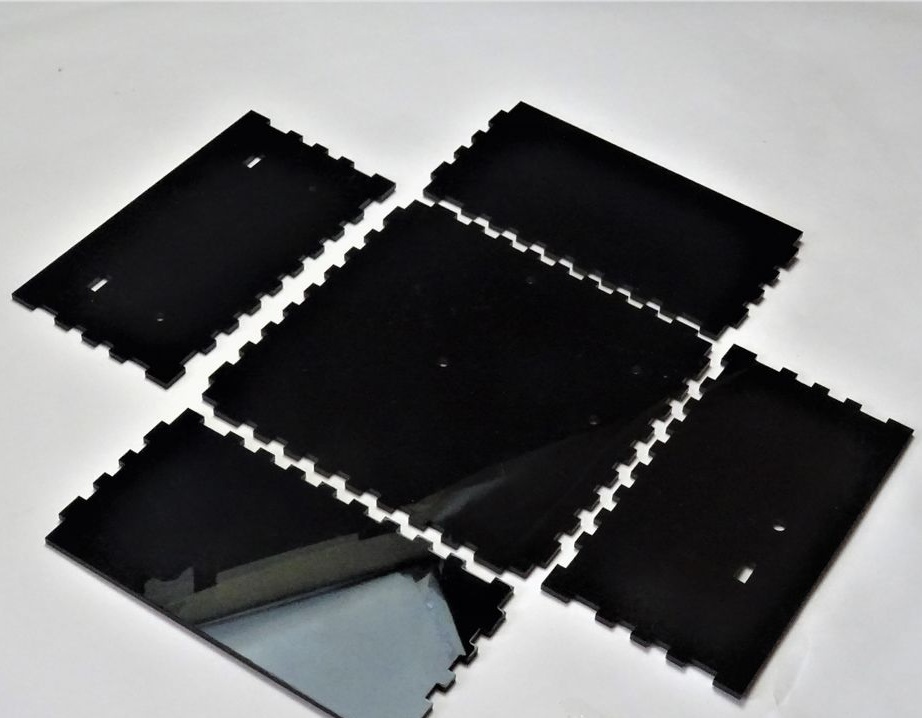
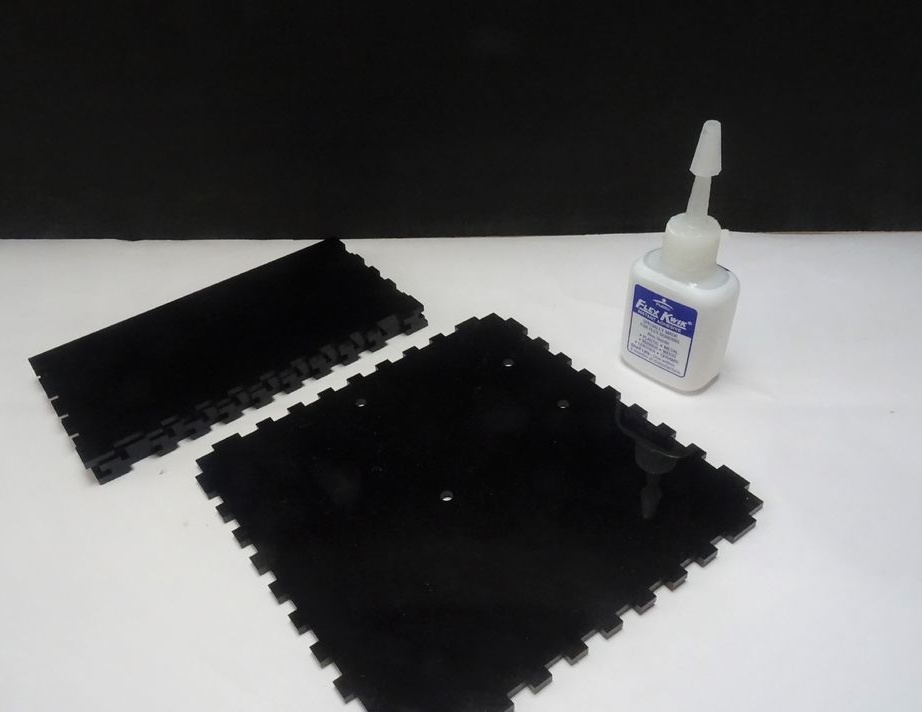
Otrais solis: griešana ar lāzeru
Apvidus automašīnai kapteinis izmantoja dažāda biezuma un krāsas akrilu.
Melns virskārta 3 mm x 1
Apakšējais slānis melns 3 mm x 1
Melnais sānu rāmis 5 mm x 2
Sānu siena caurspīdīga 2 mm x 1
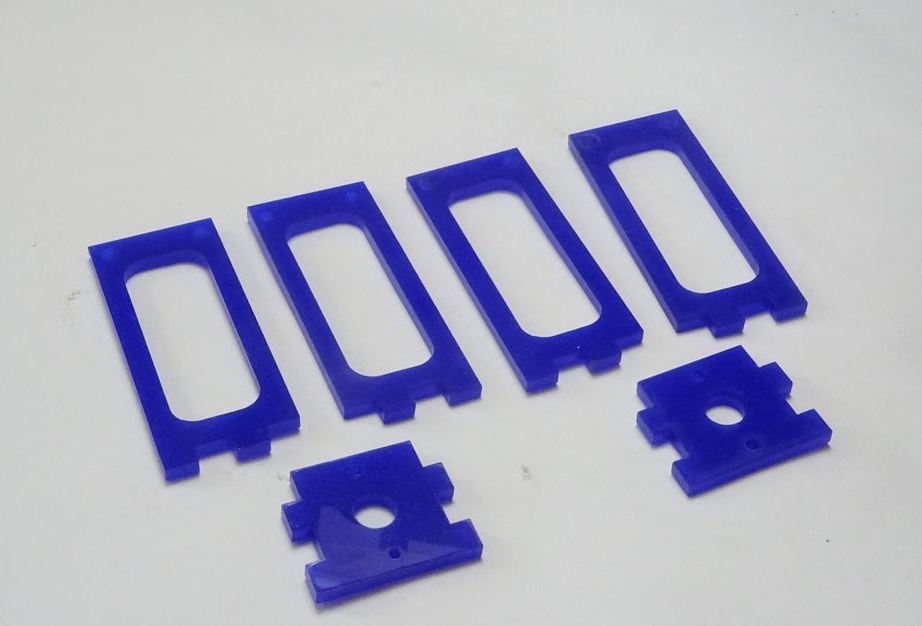
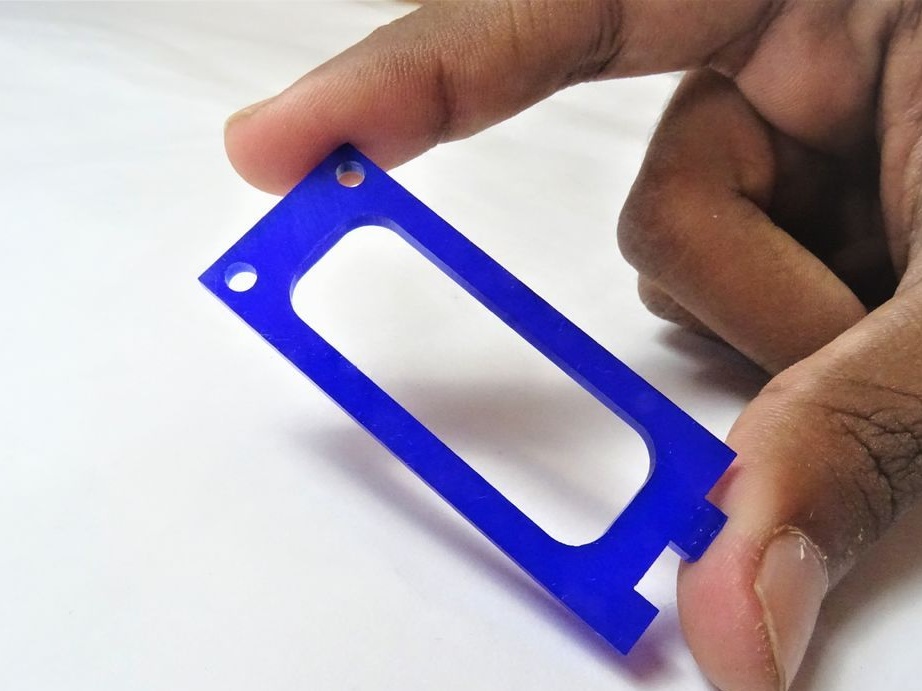
Barošanas puse zila 3 mm x 4
Tilts augšējais gabals zils 3 mm x 2
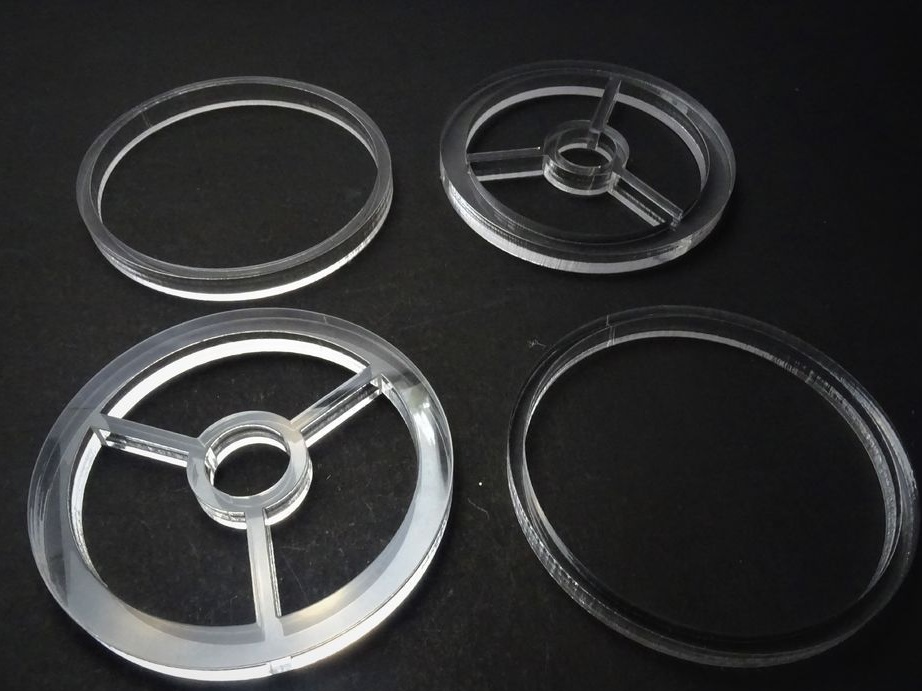
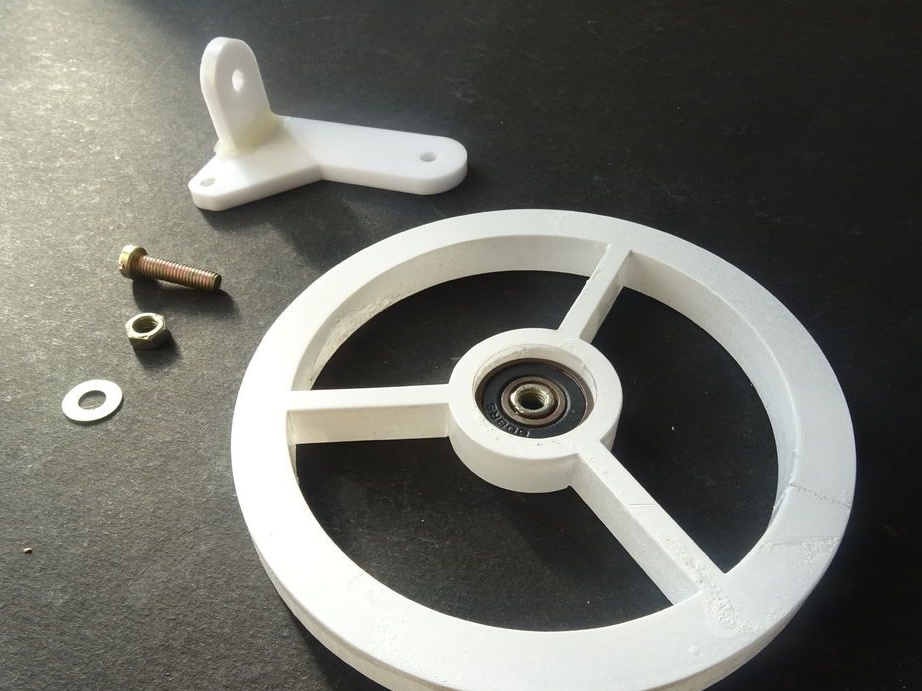
Dzinēja disks balts 3 mm x 2
Priekšējais ritenis balts 10 mm x 2
Iekšējais loks (aizmugurējais ritenis) balts 3 mm x 4
Ārējā mala (aizmugurējais ritenis) Balta 10 mm x 2
Stūres iekārta Balta 3 mm x 1
Atvilktņu skapis melns 3 mm x 1
Melns nodalījuma vāks 3 mm x 1
Aizmugurējā motora ass Balta 3 mm x 2
Priekšējais panelis balts 5 mm x 2



CNC failu var lejupielādēt no saites.
Lāzera griešanas Rover Parts.zip
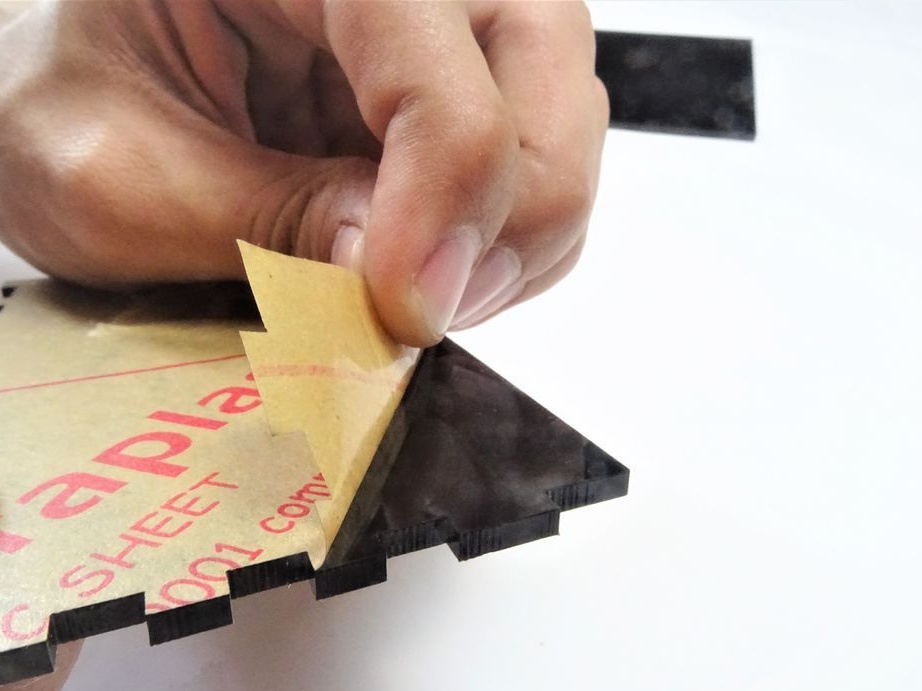
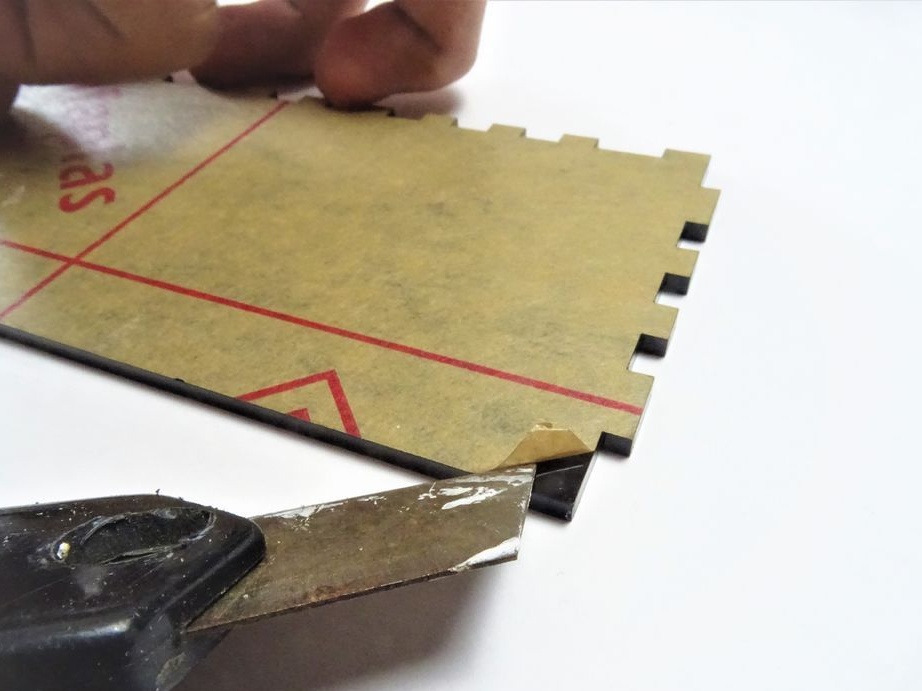
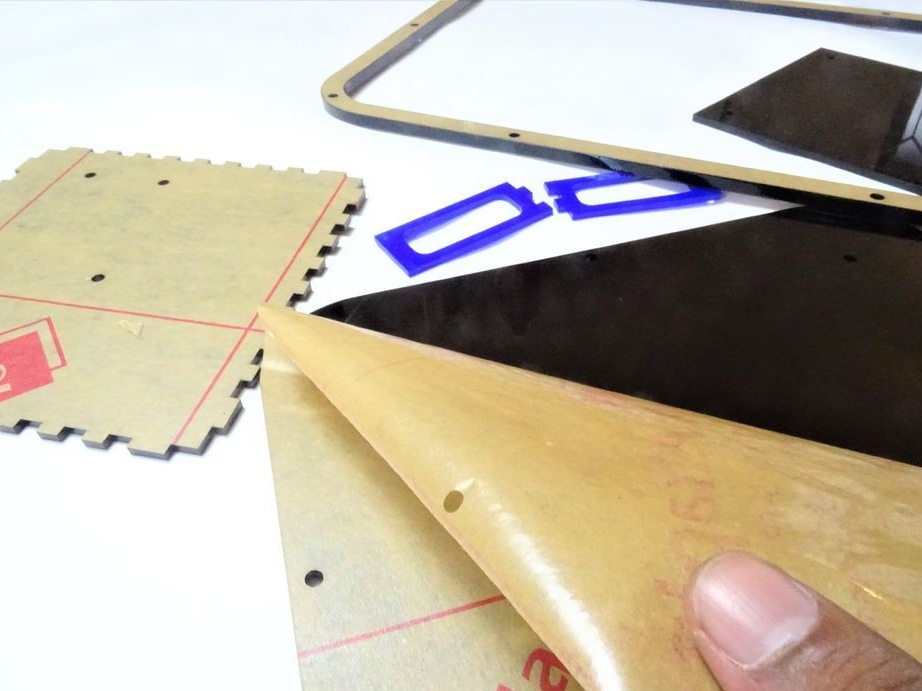
Pēc detaļu izgatavošanas noņem no tām aizsargkārtu.
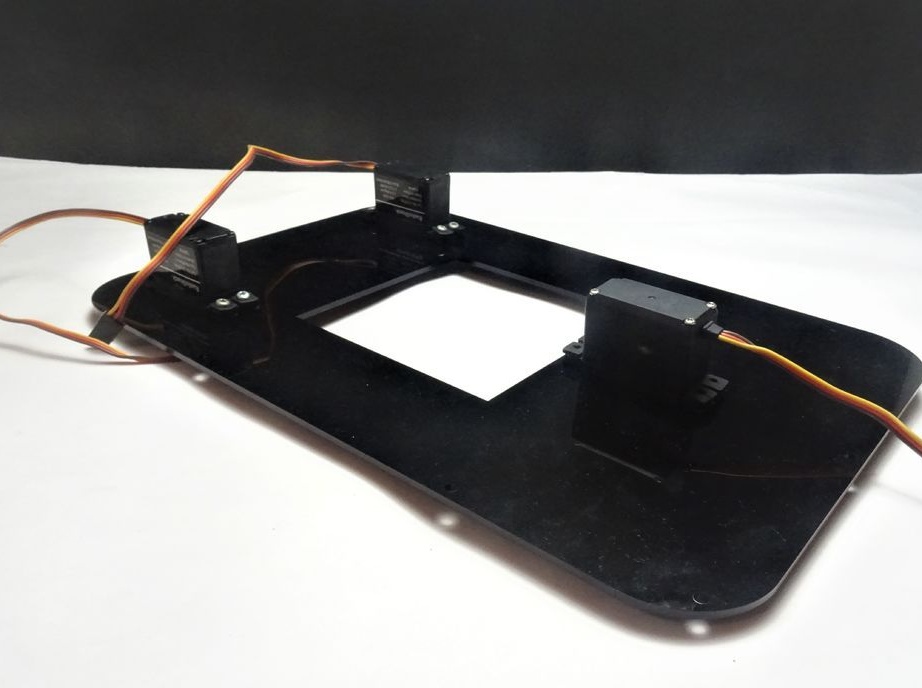
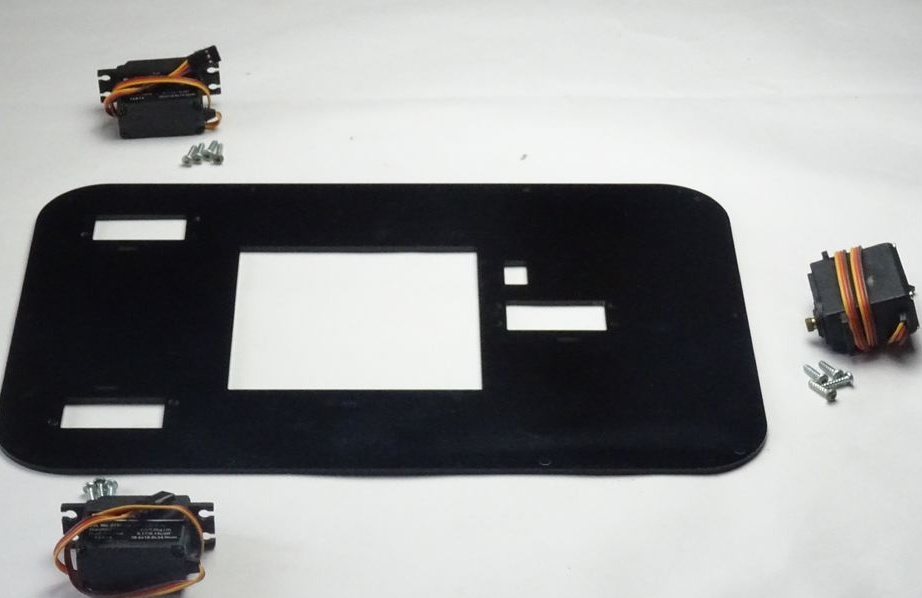
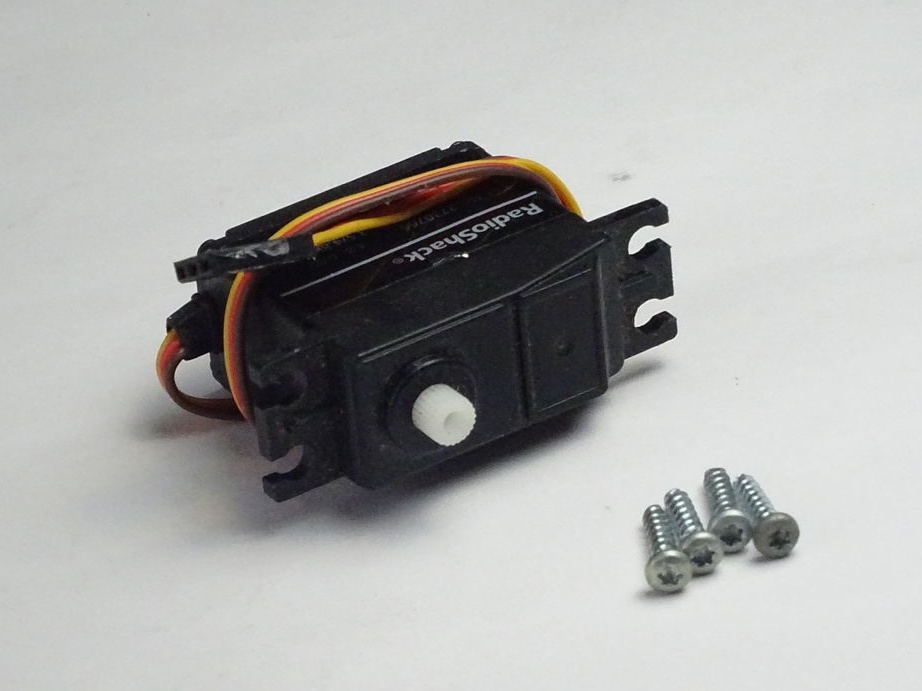
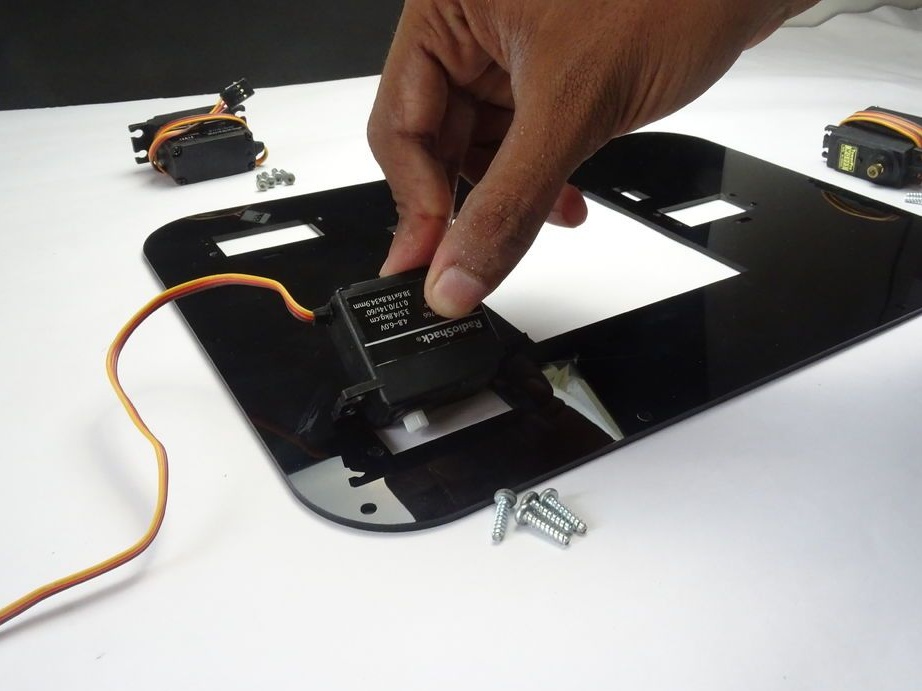
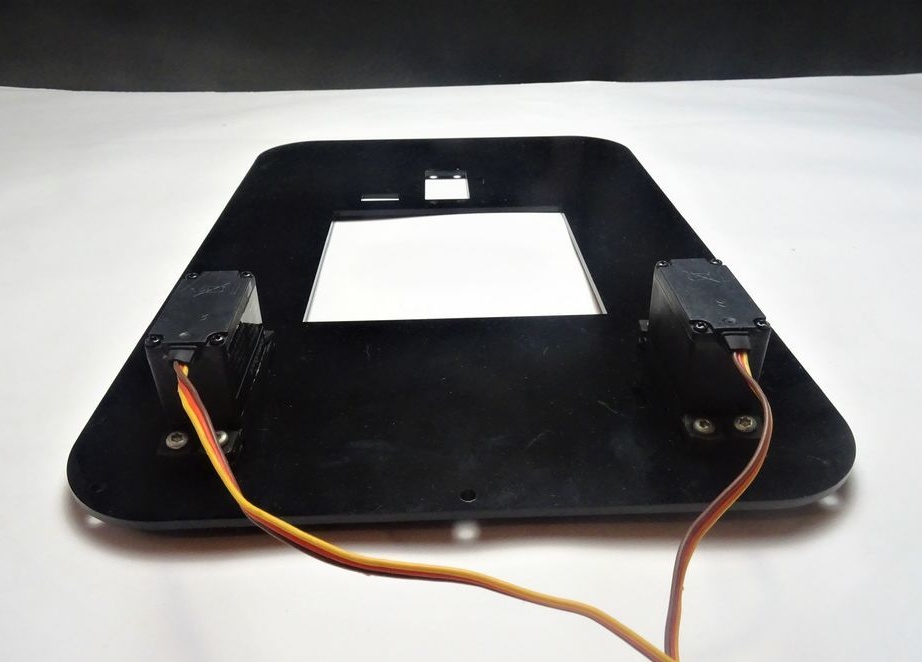
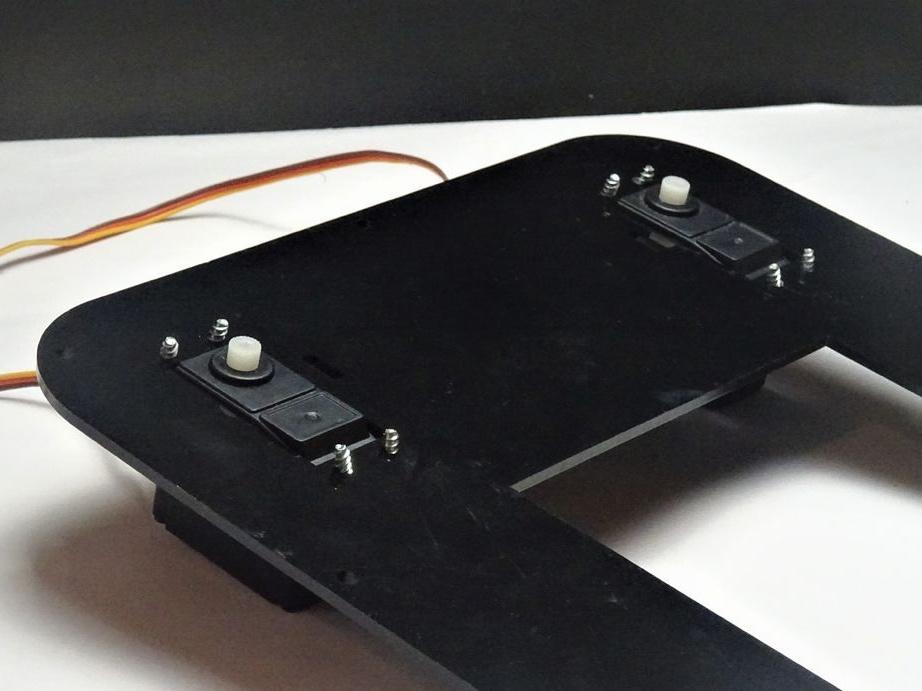
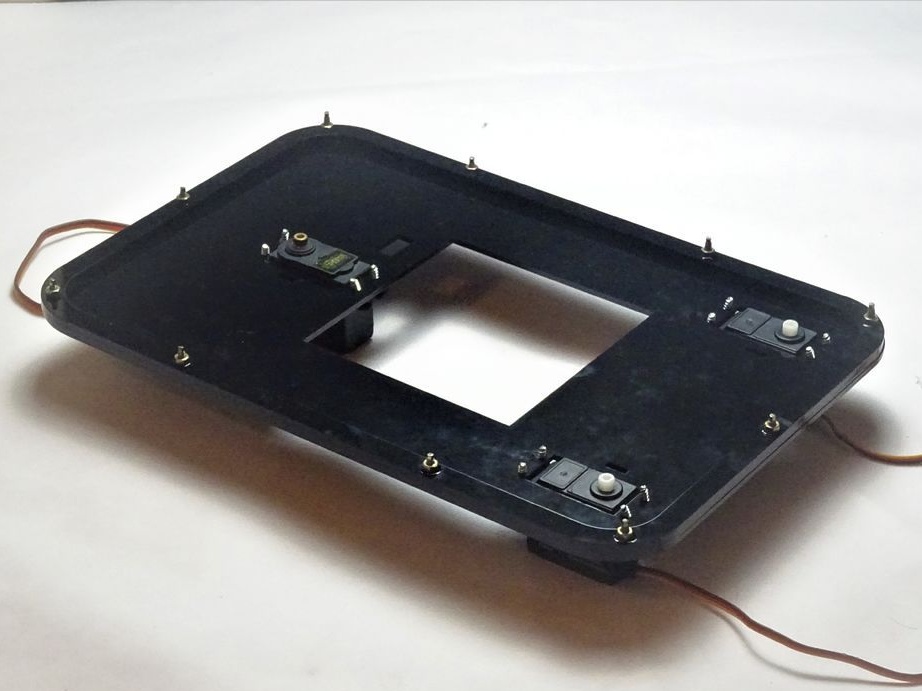
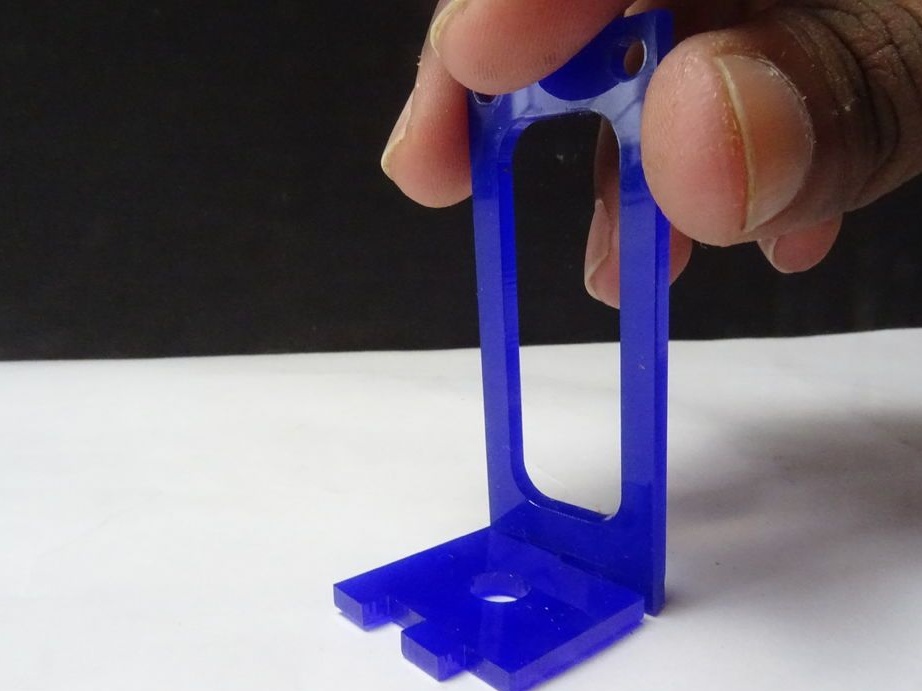
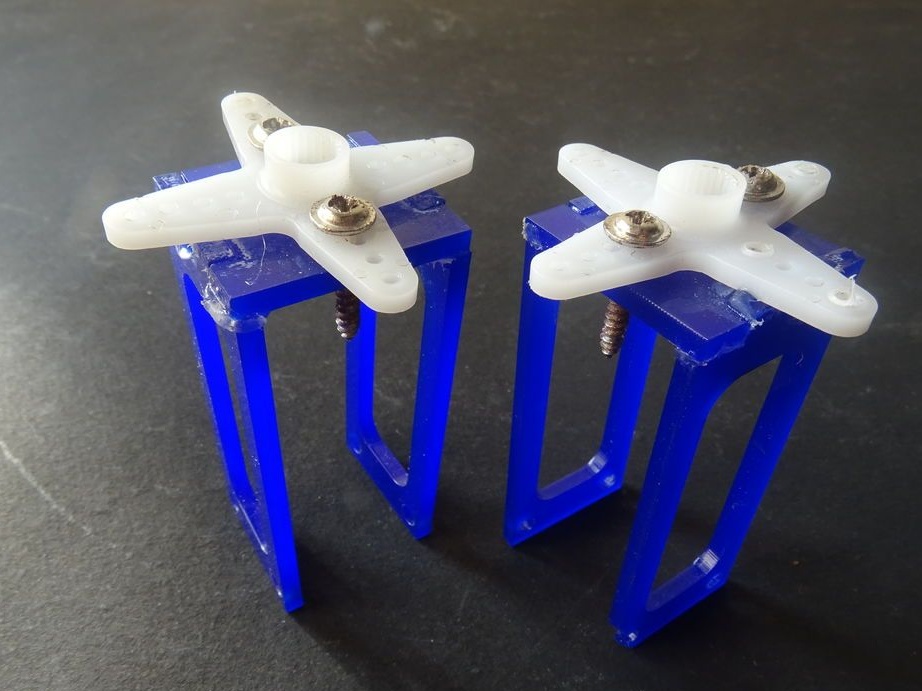
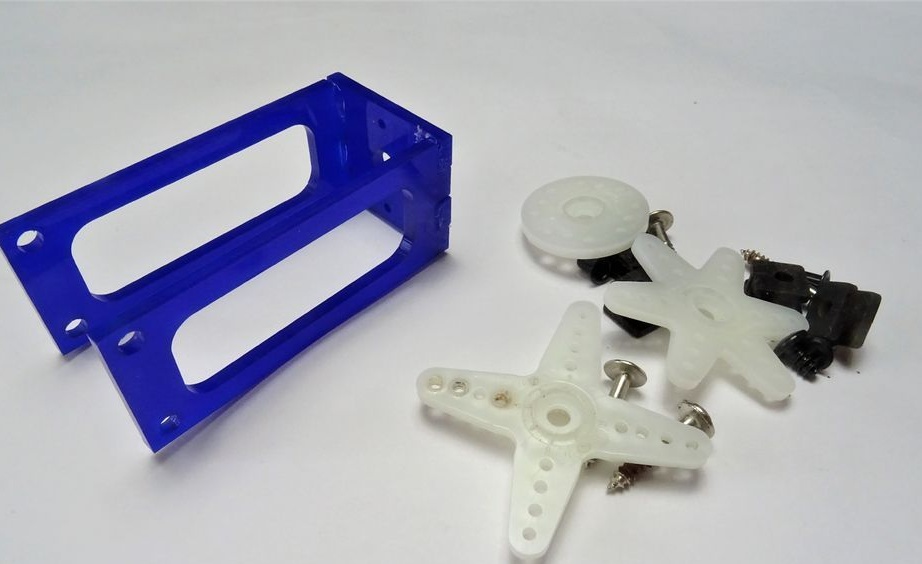
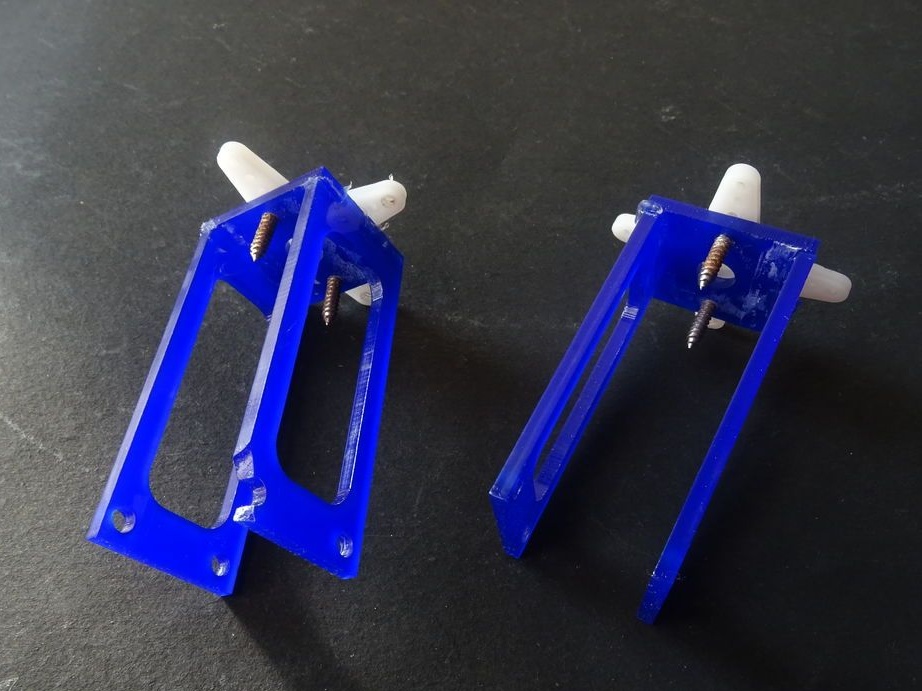
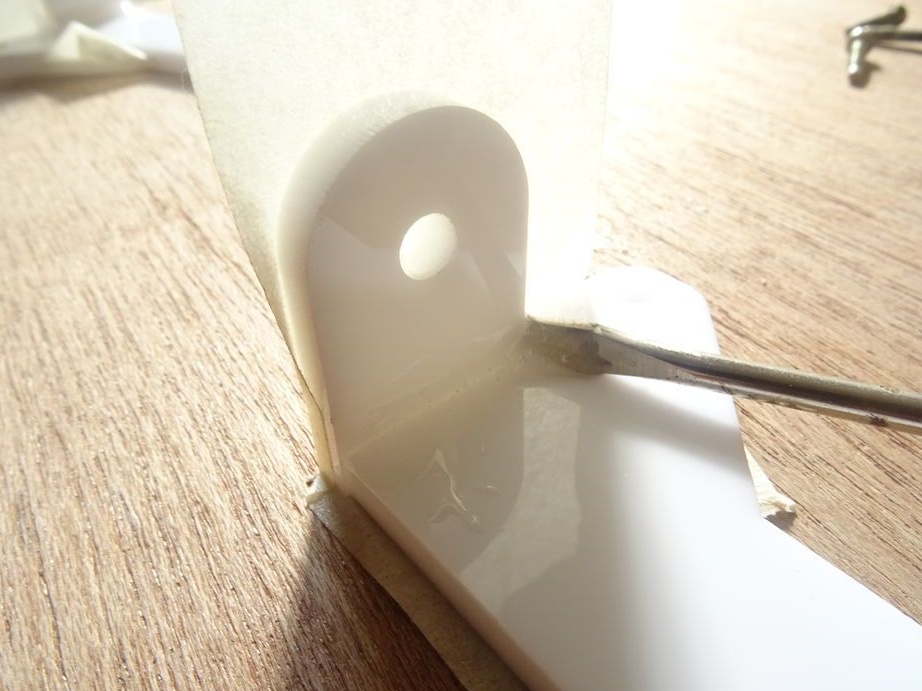
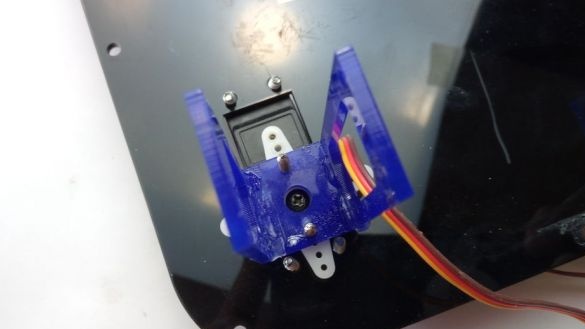
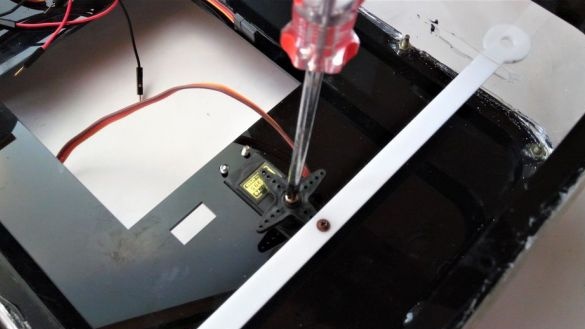
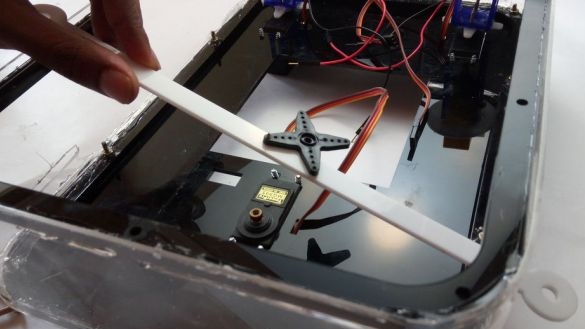
Trešais solis: instalējiet servo motorus
Visi trīs servodzinēji ir pieskrūvēti pie platformas. Divas uz aizmuguri un viena uz priekšu.

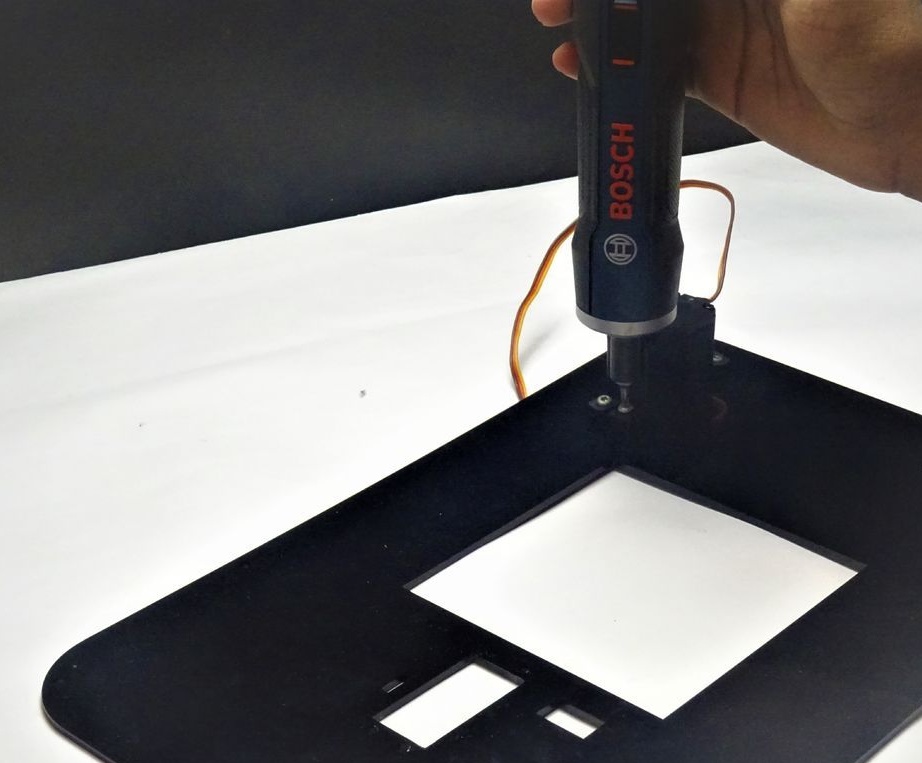
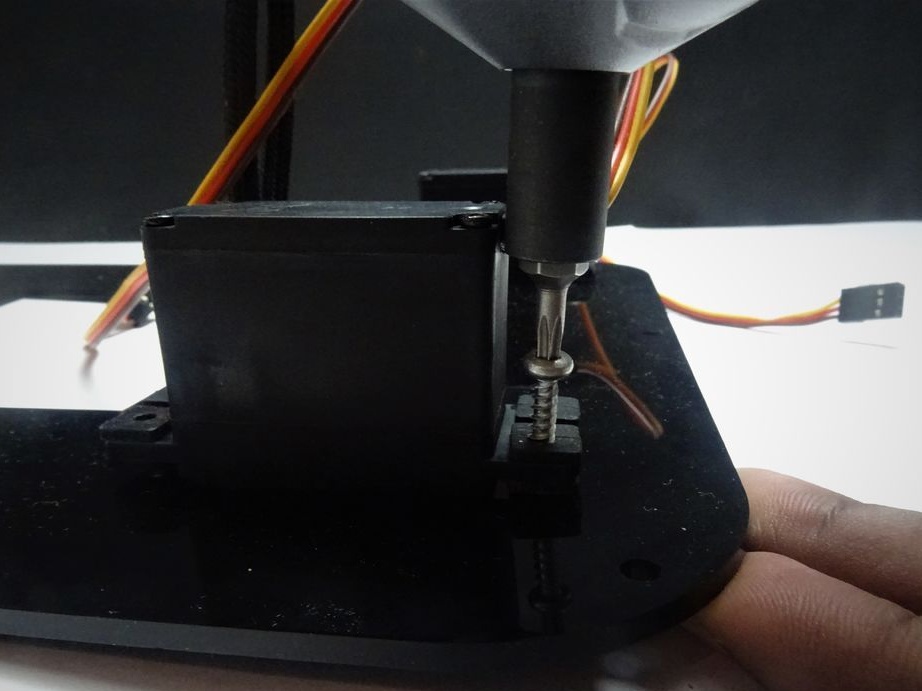
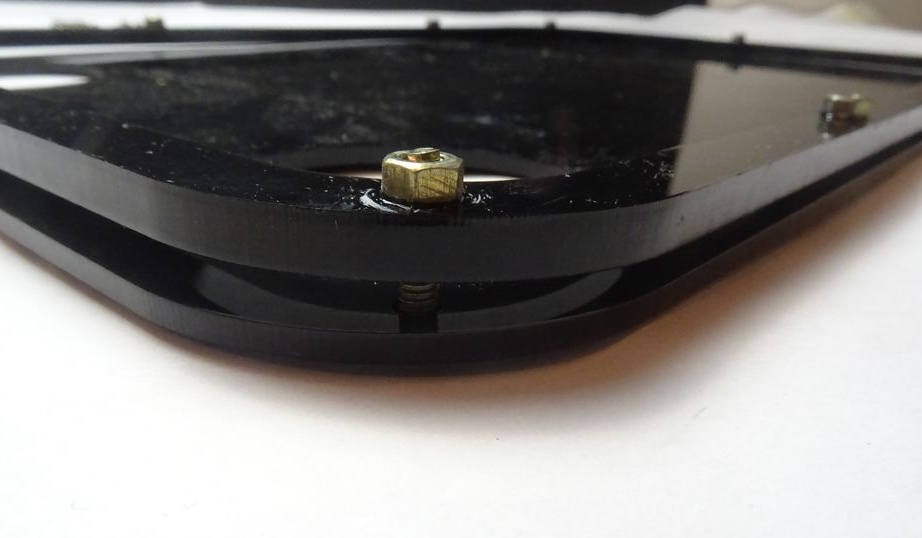
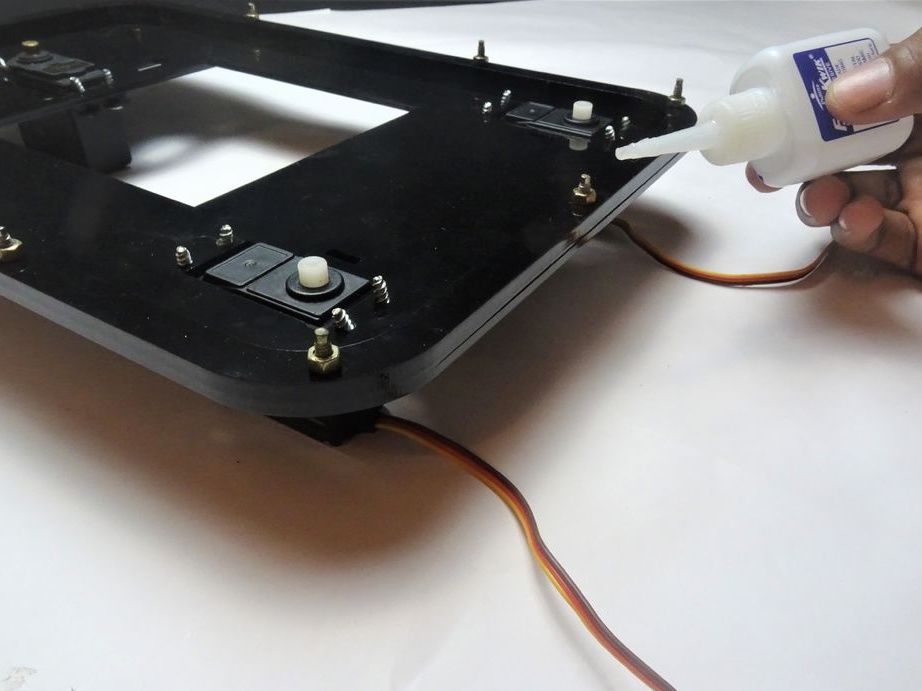
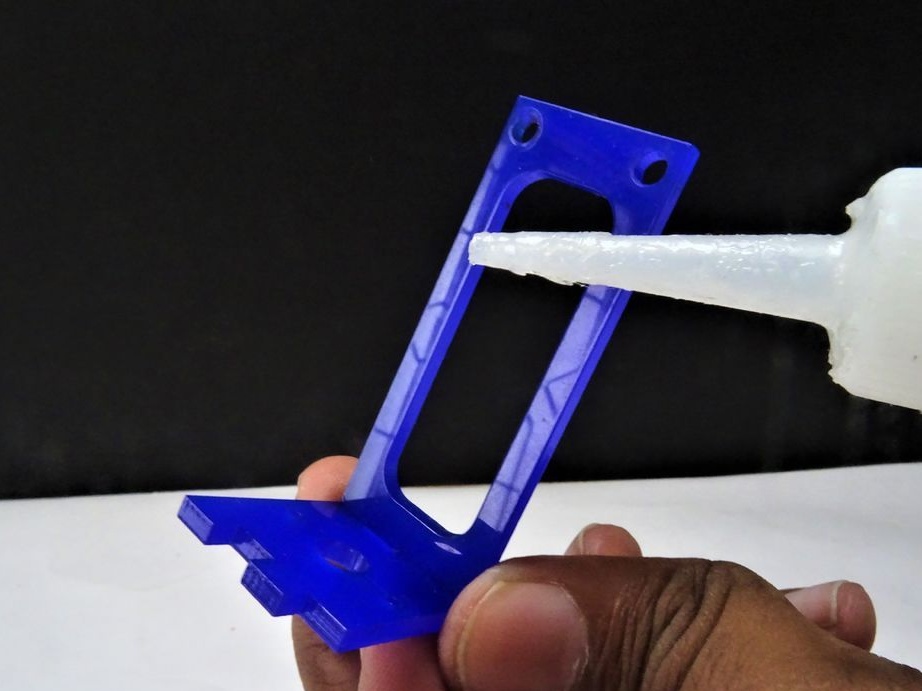
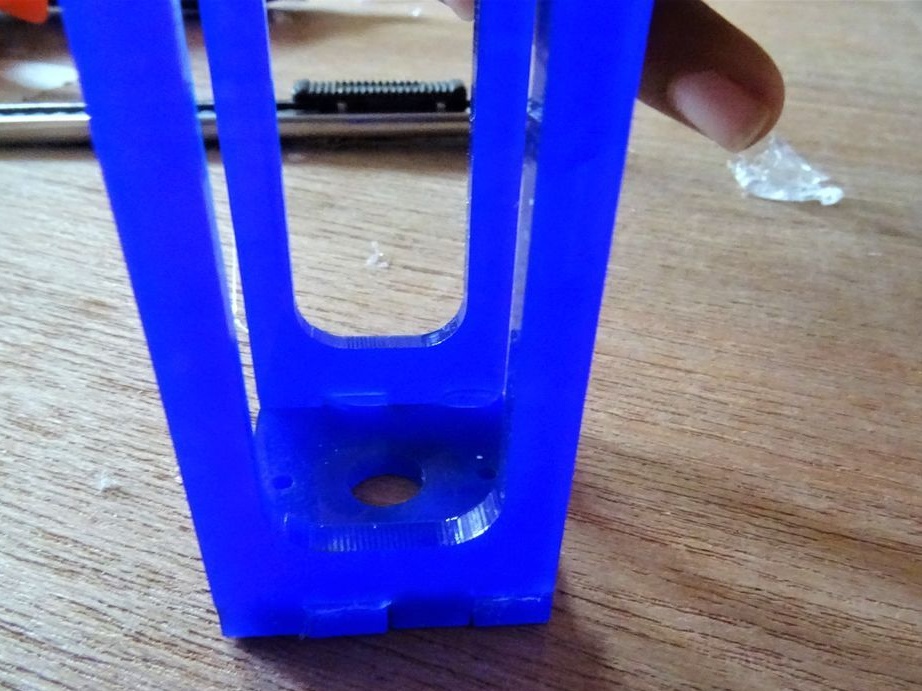
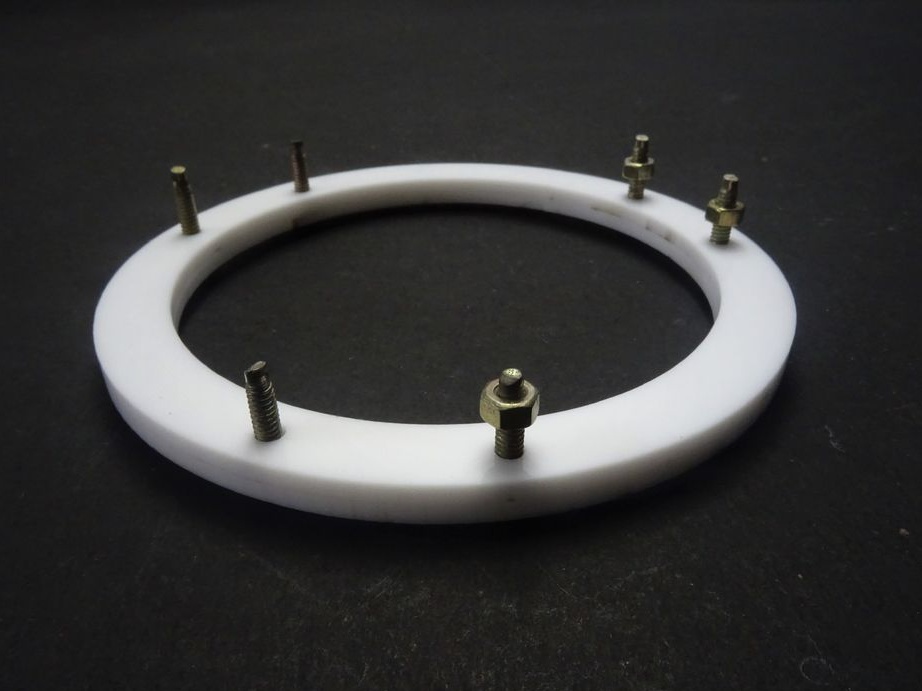
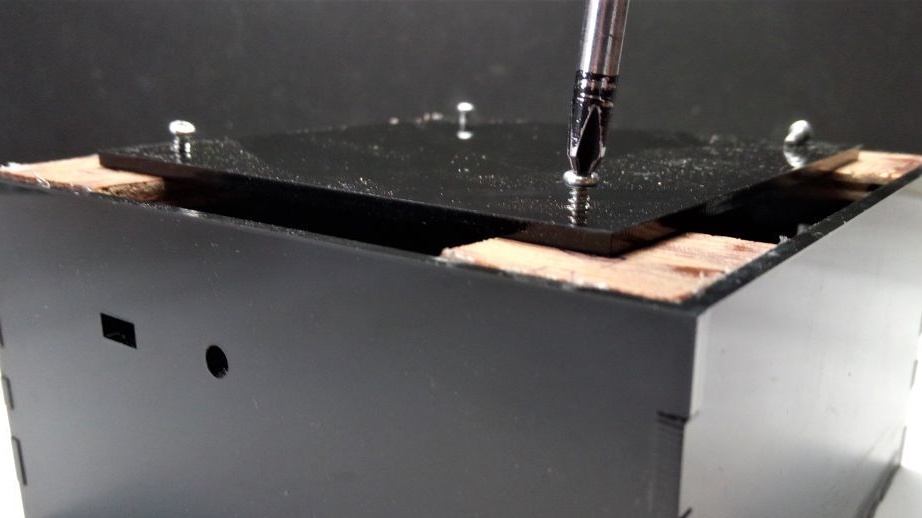
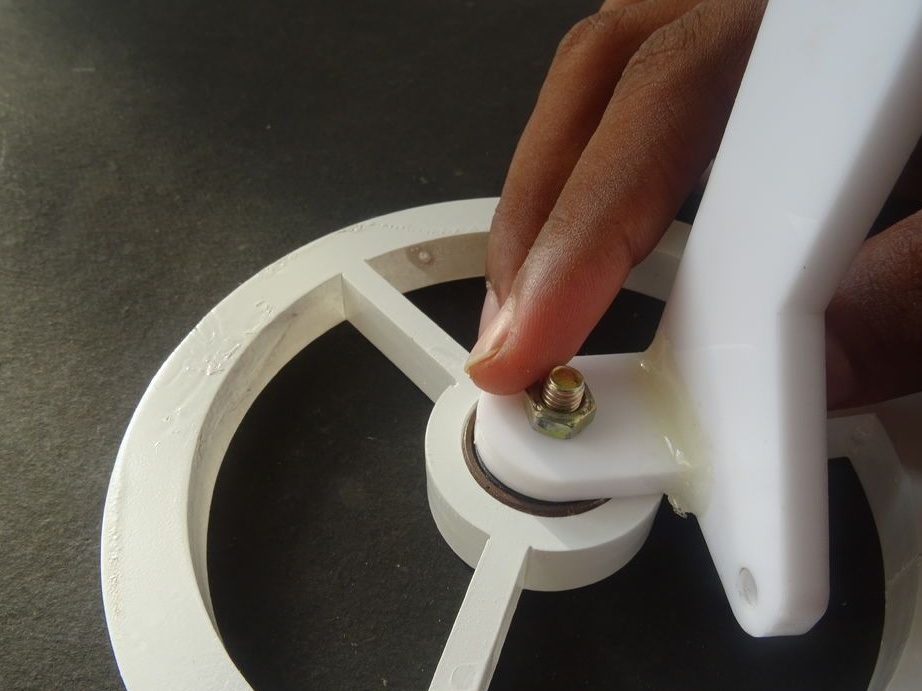
Ceturtais solis: rieksti
Lai piekļūtu mehānismiem, augšējā un apakšējā daļa ir pieskrūvēta kopā. Līmējiet superlīmes riekstus pie rāmja un pēc tam to pastiprina ar epoksīdu.


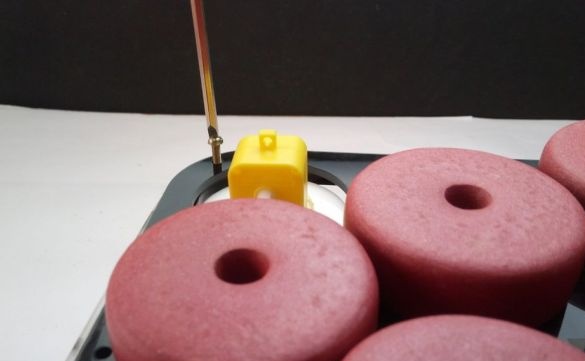
Piektais solis: pludiņi
Līmes pludiņi.



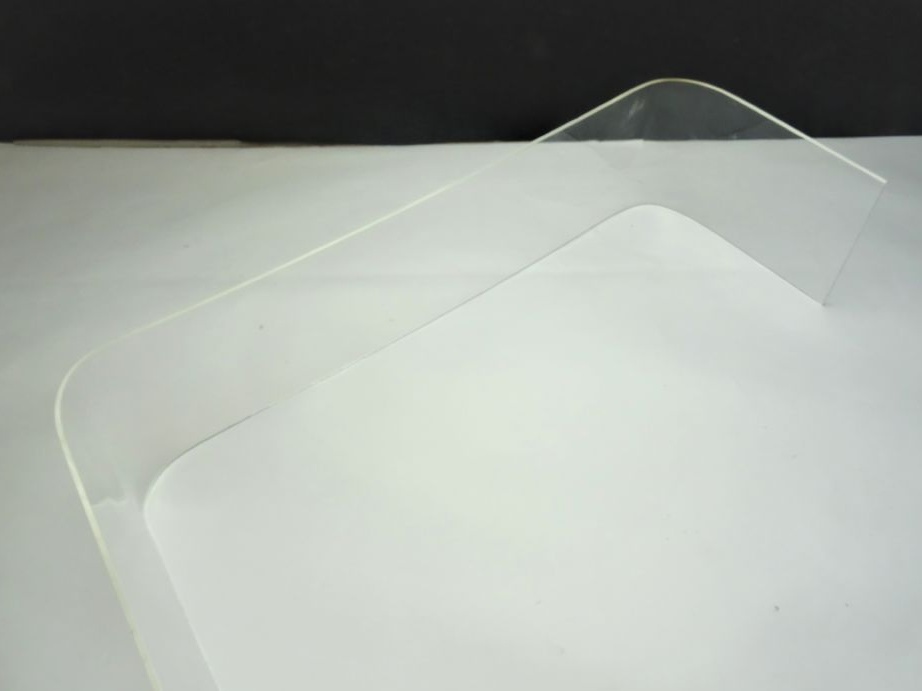
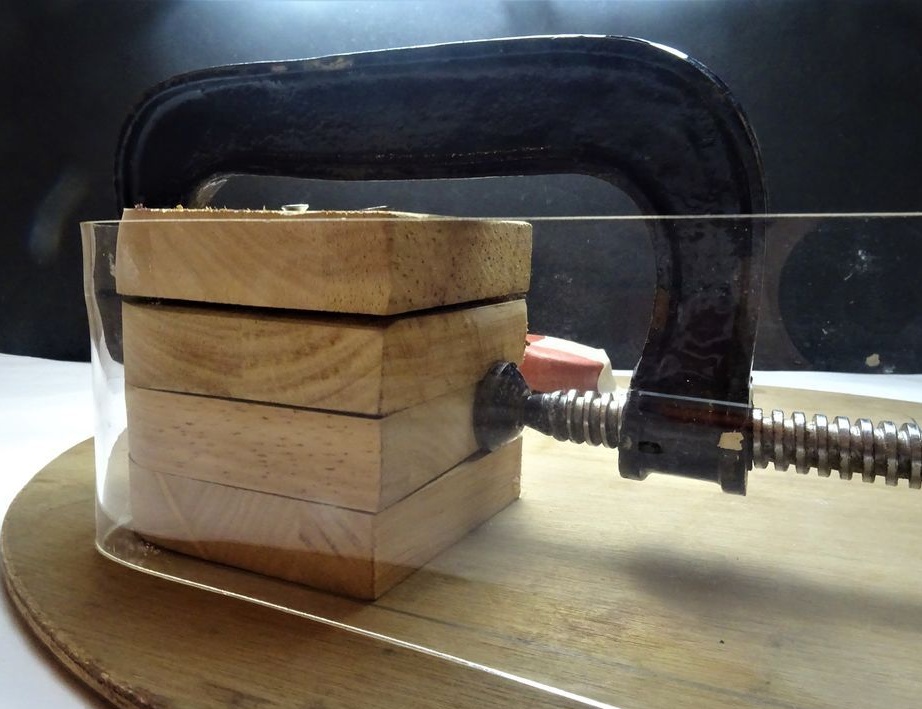
Sestais solis: Akrila veidošana
Lai saliektu akrilu, amatnieks no koka izgatavo veidni.



Viņš sastiprina daļu ar skavu un, sildot to ar fēnu, piešķir tai daļu vēlamo formu.





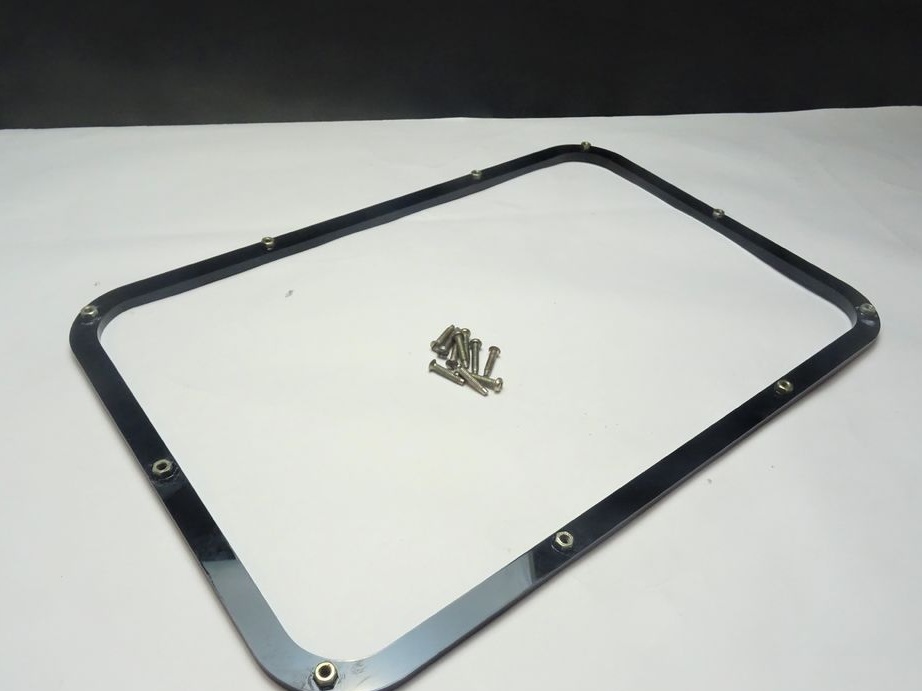
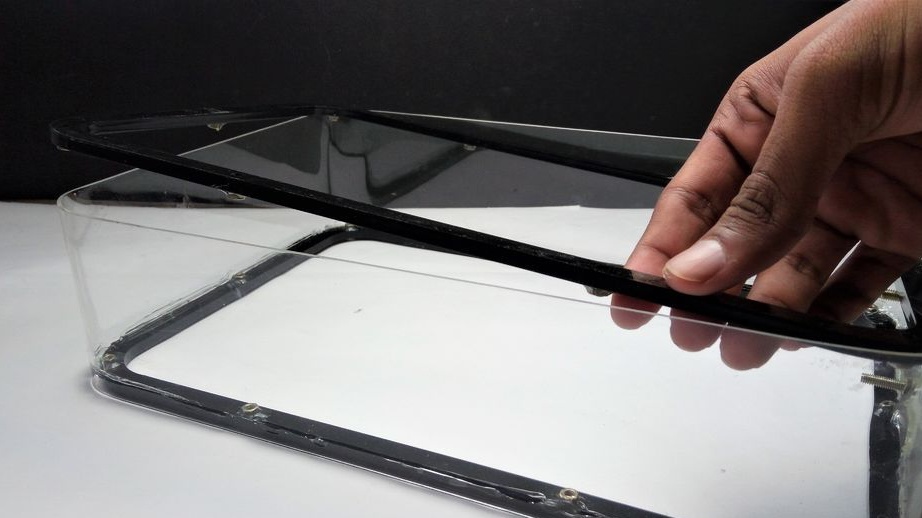
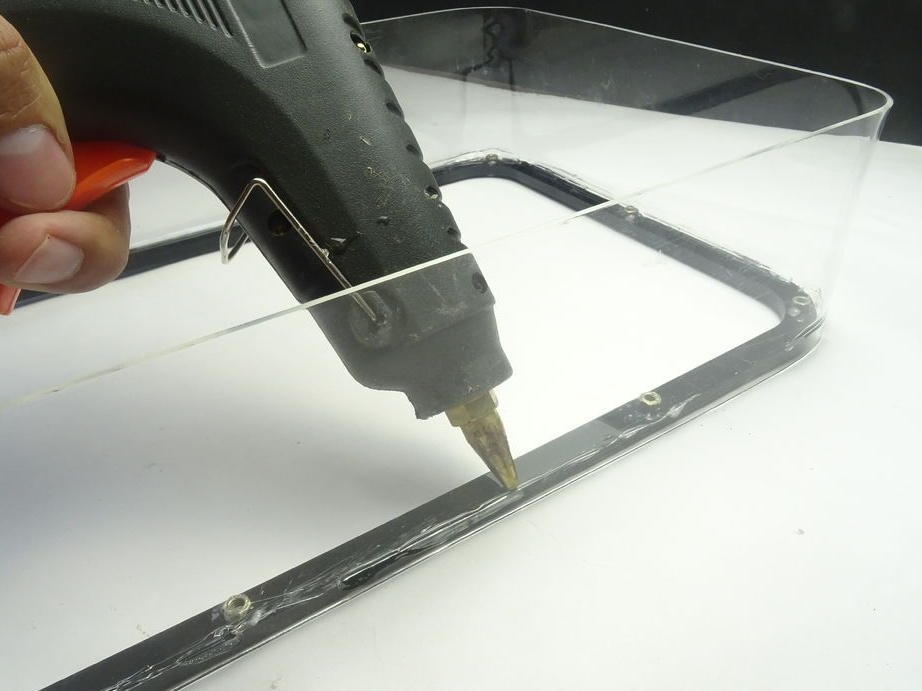
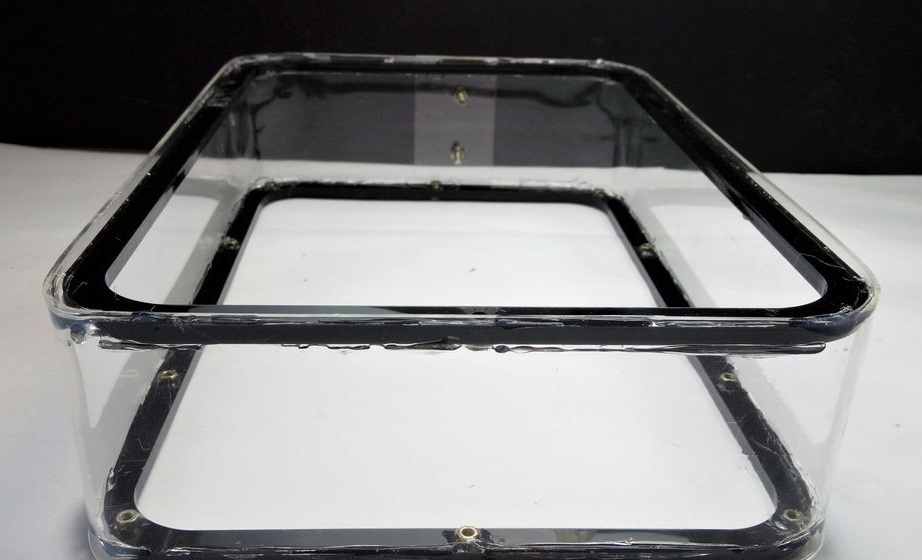
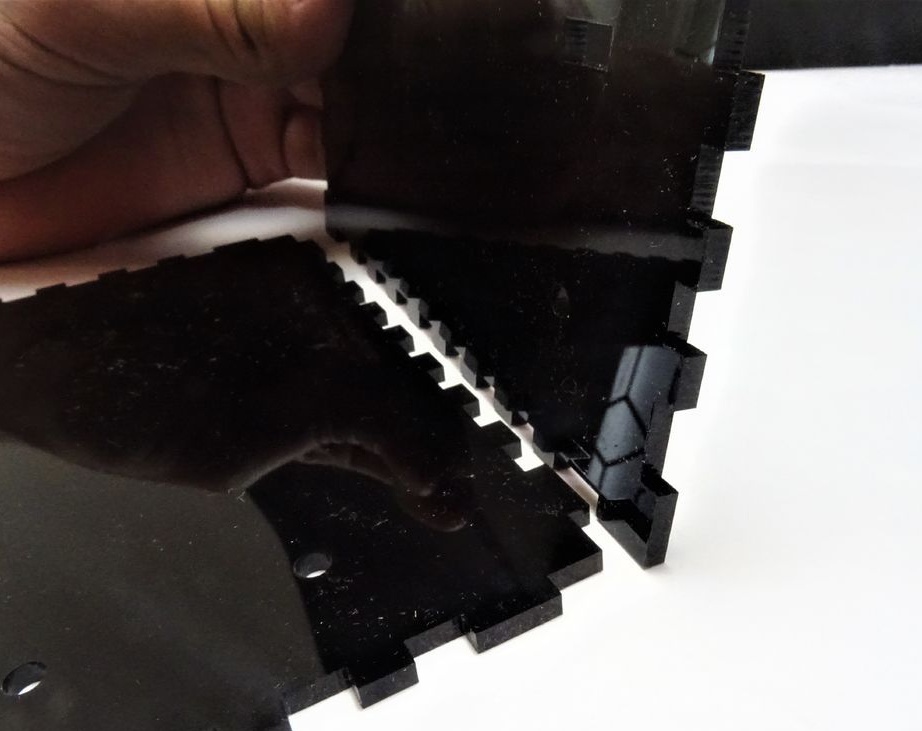
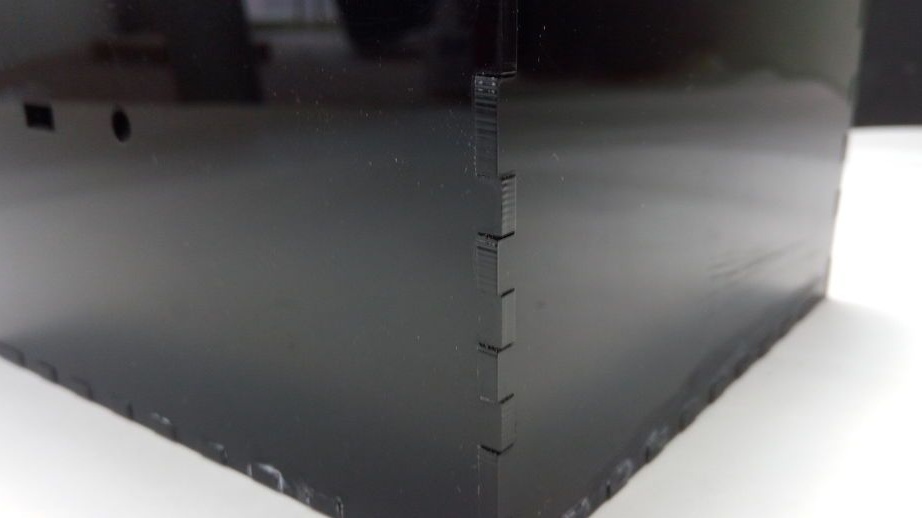
Septītais solis: ietvars
Līmē augšējo un apakšējo rāmi caurspīdīgam ķermenim. Šuves ir rūpīgi noslēgtas ar karstu līmi.







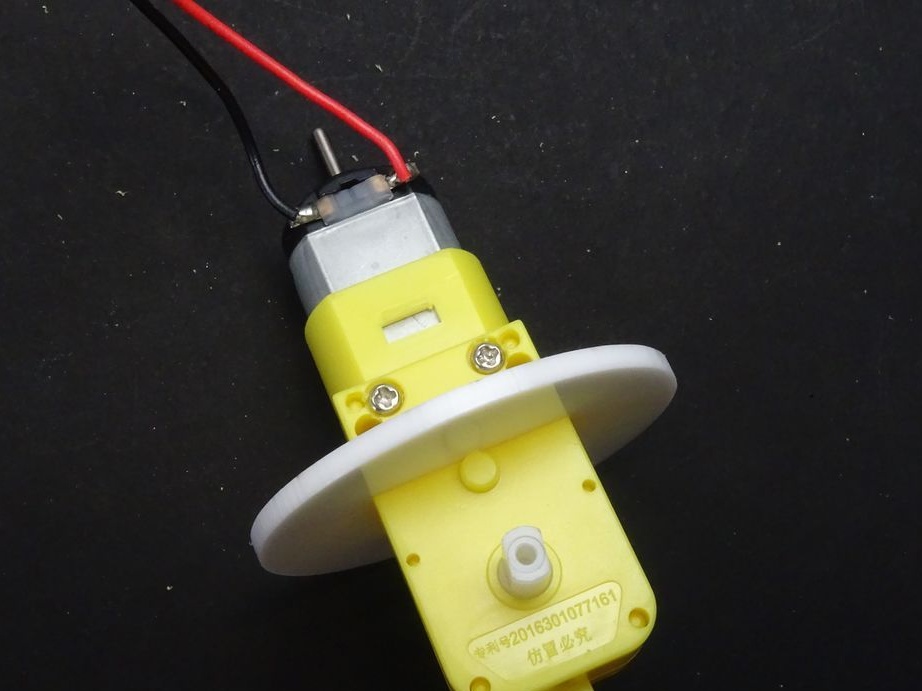
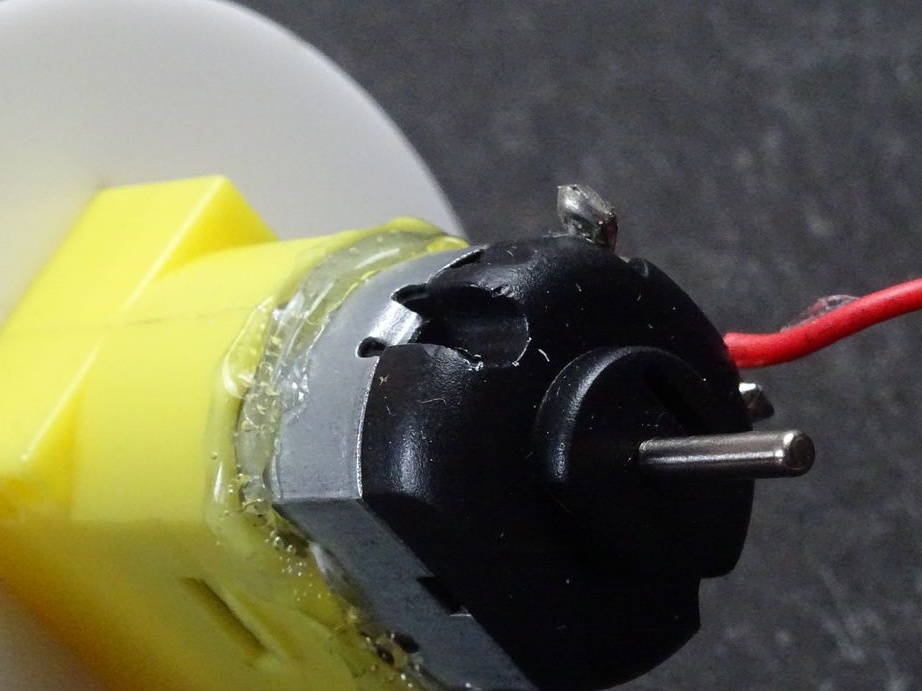
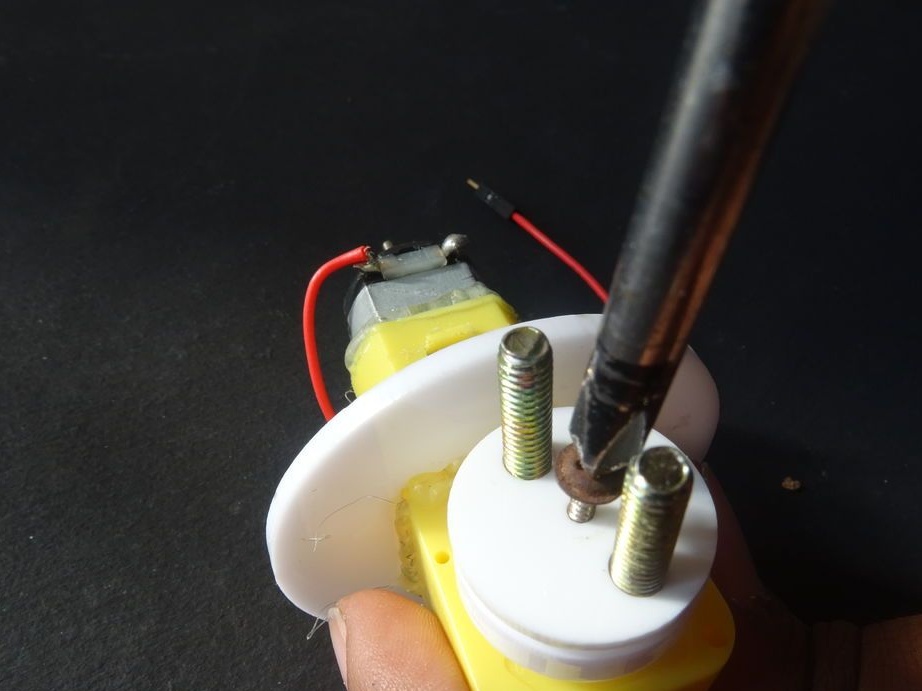
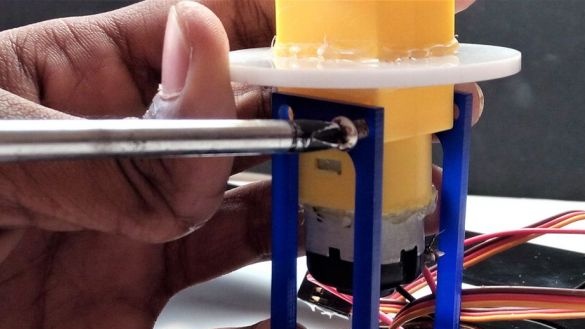
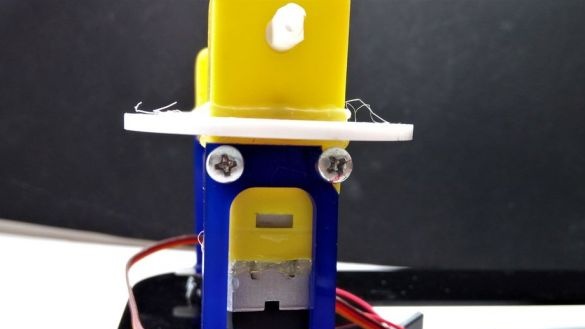
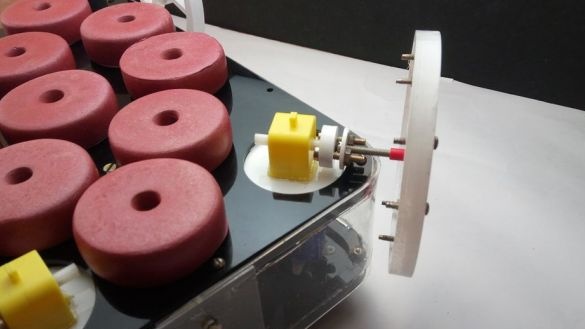
Astotais solis: motora iestatīšana
Tagad jums jāapstrādā motora korpuss, lai tajā uzstādītu detaļas.
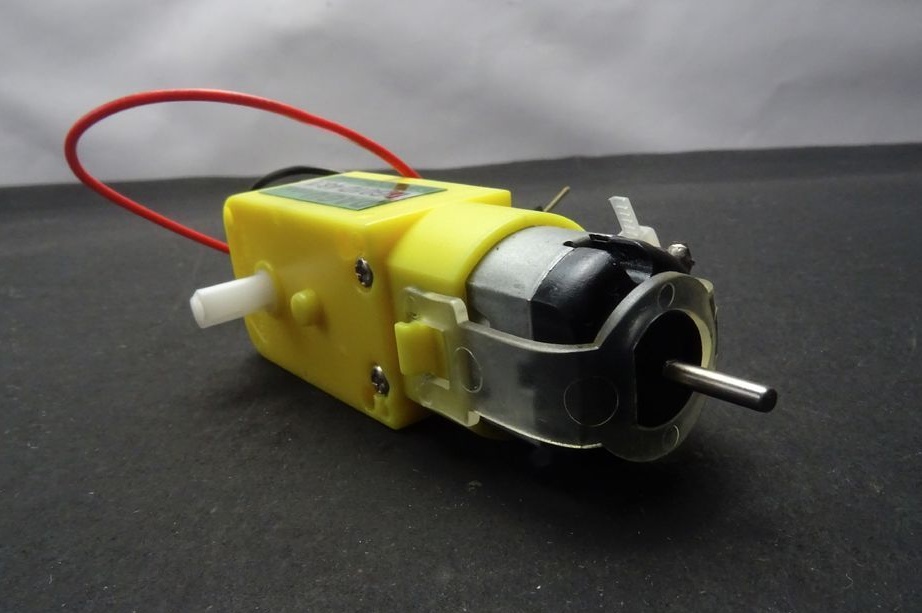
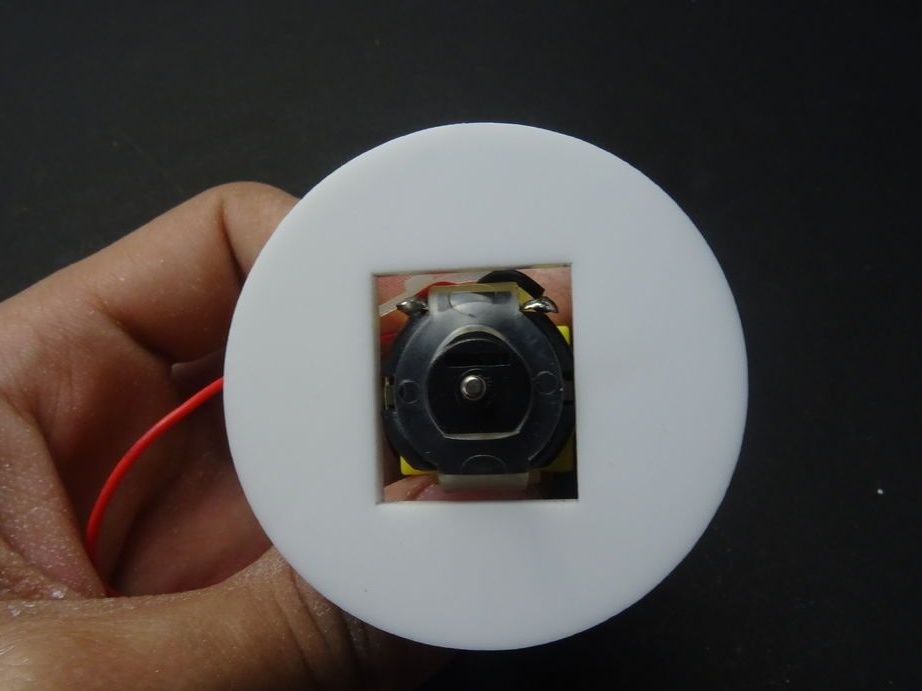
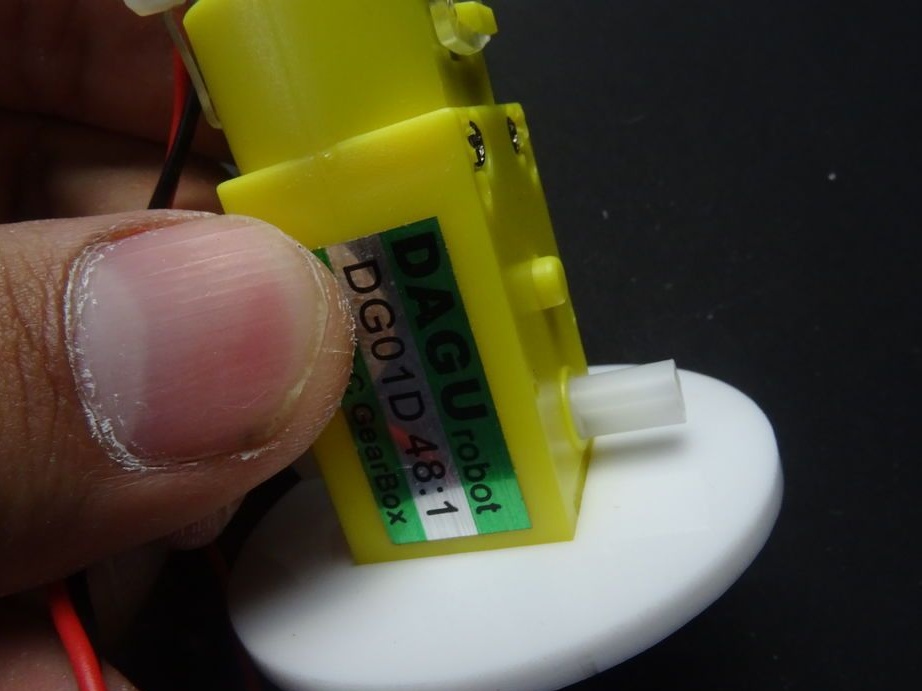

No ķermeņa izspiež visas izvirzītās daļas līdz uzlīmei.
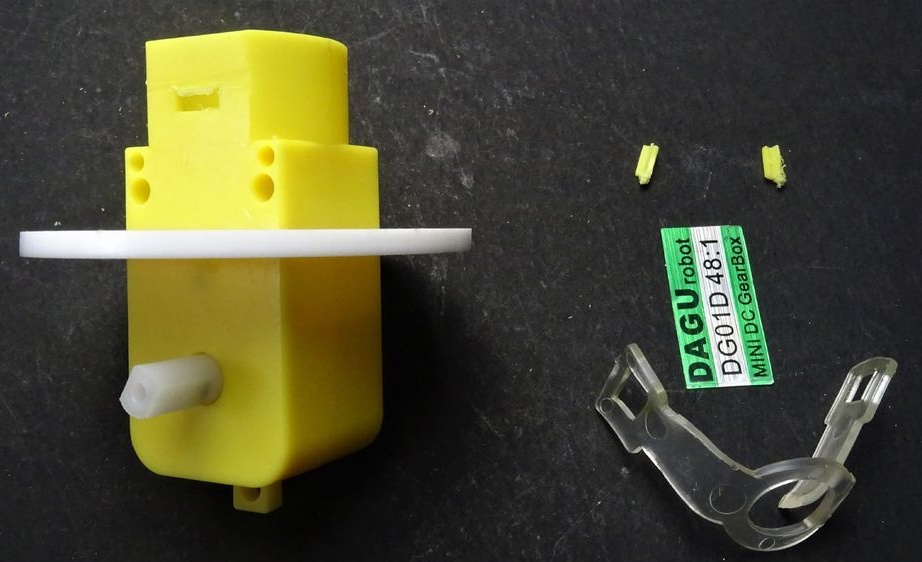

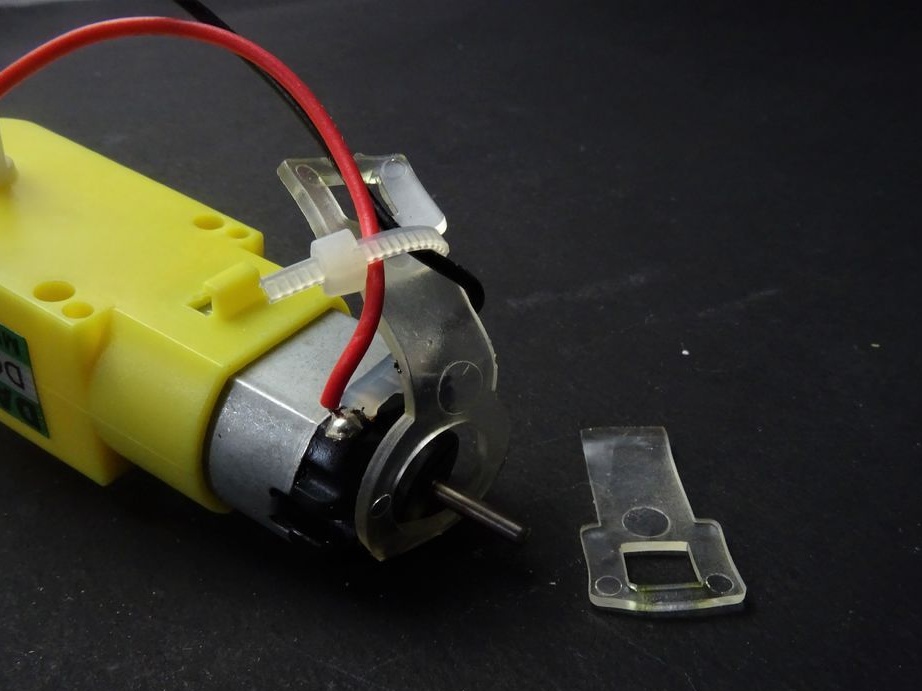
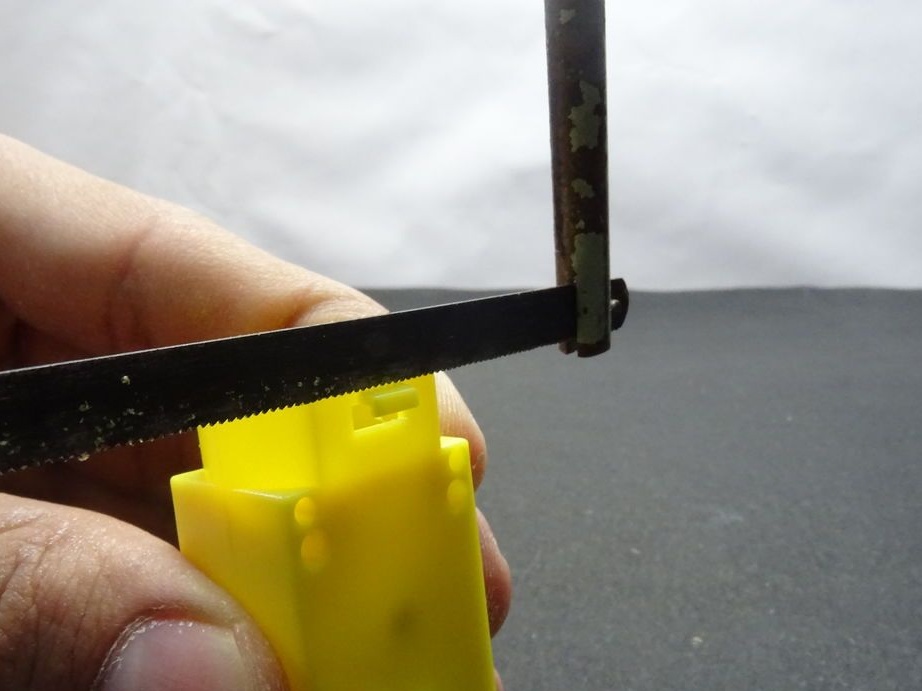


Uzstāda daļu uz ķermeņa un pielīmē to. Tā kā bija nepieciešams nogriezt motora stiprinājumu (aizbīdņus), dzinējs tiek fiksēts arī ar līmi.

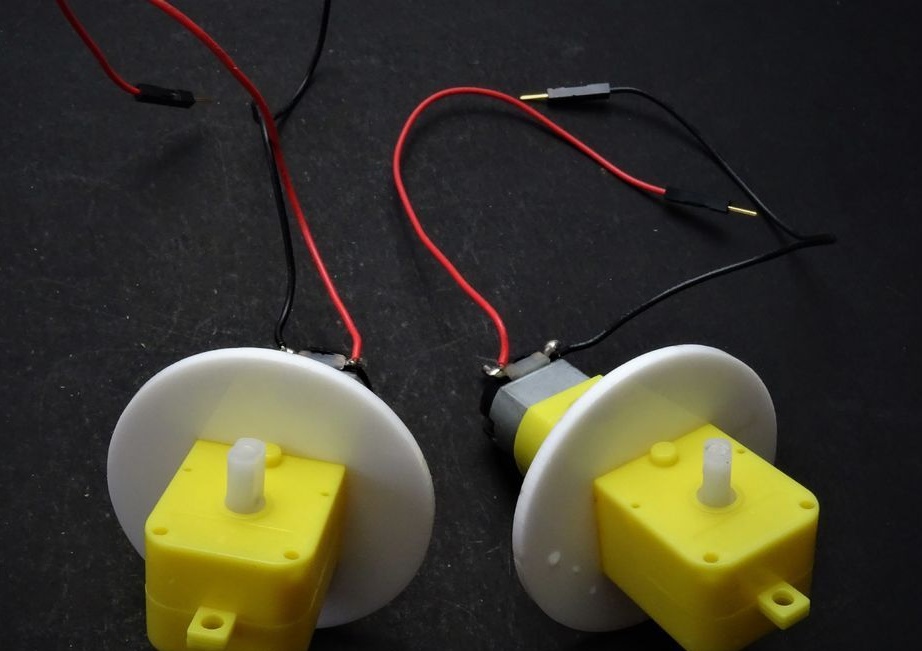

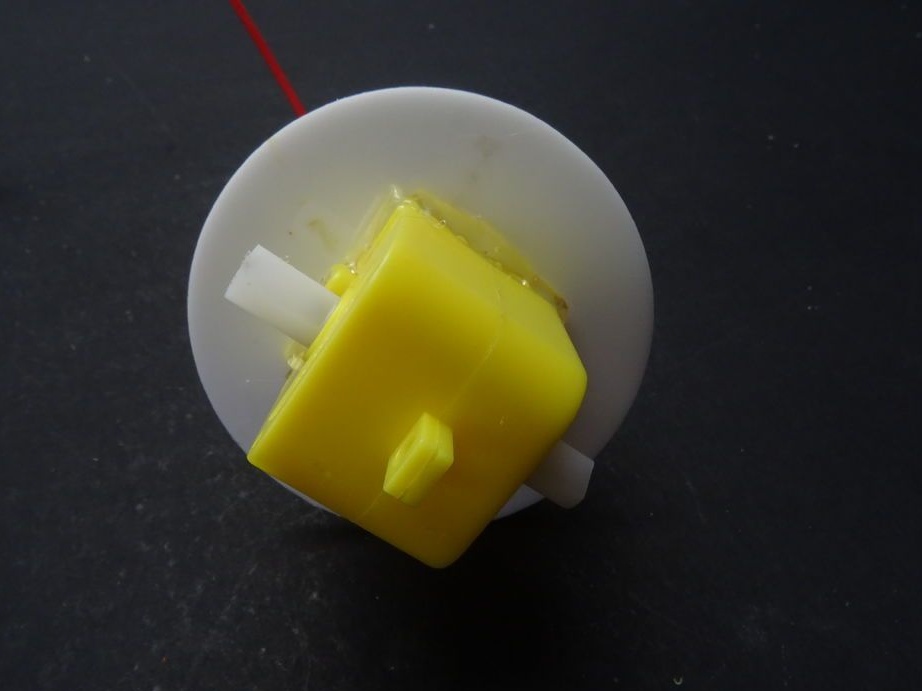
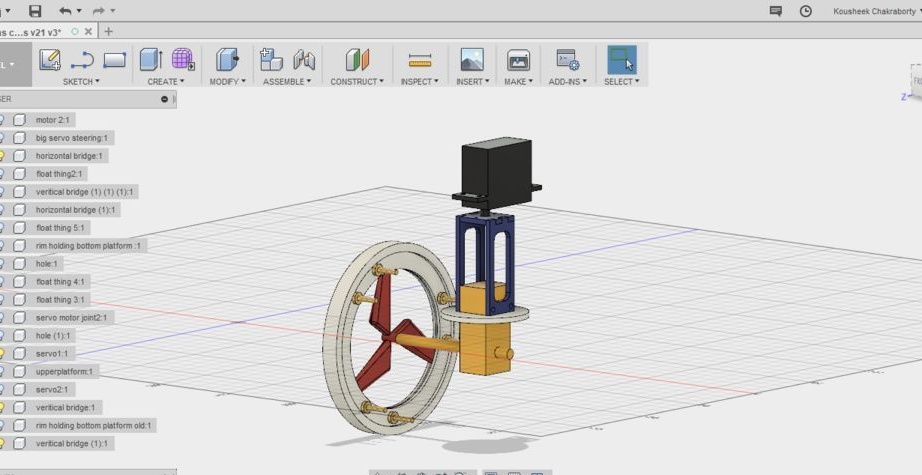
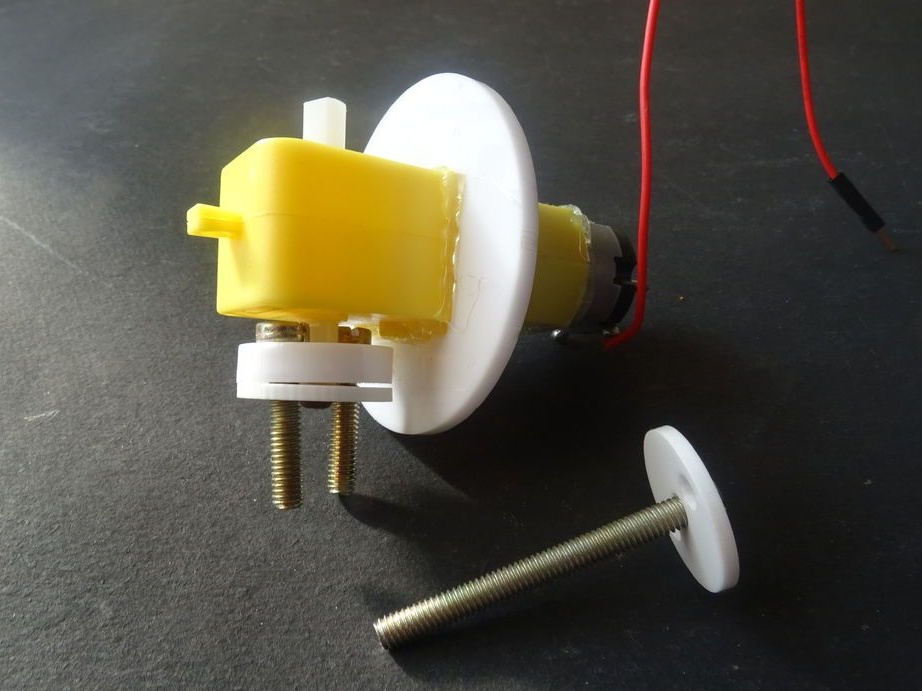
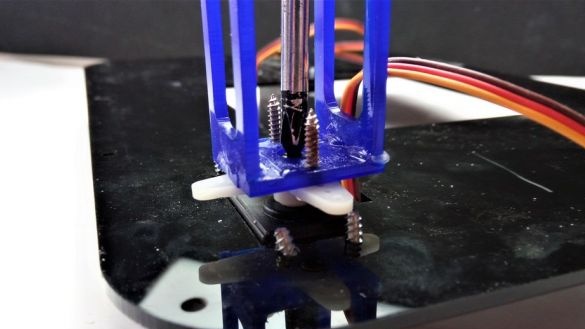
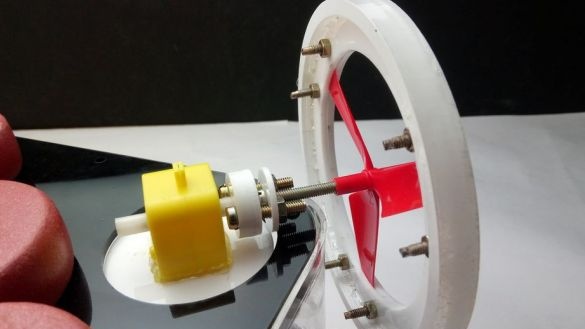
Deviņs solis: Grozāmais mehānisms
Saliek rotējošu korpusu. Tajā tiks uzstādīts motors, un tas tiks savienots ar servo piedziņu.
Līmē lietu.


Skrūves uz savienotāju.


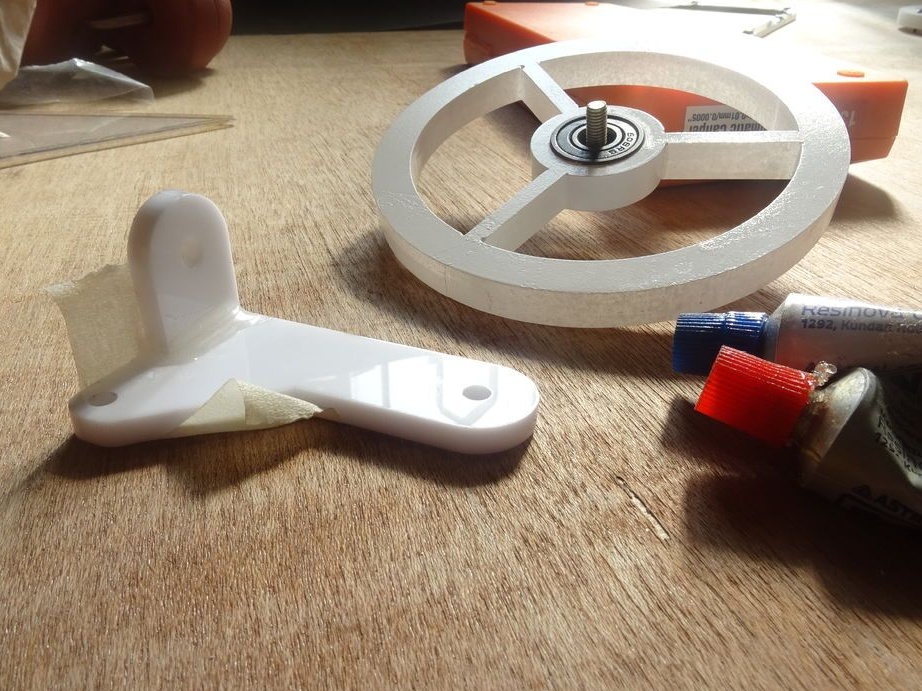
Desmit solis: gleznošana
Tā kā meistaram nebija vajadzīgā biezuma balta akrila, riteņi un mala tika izgriezti no caurspīdīga akrila un pēc tam nokrāsoti baltā krāsā.




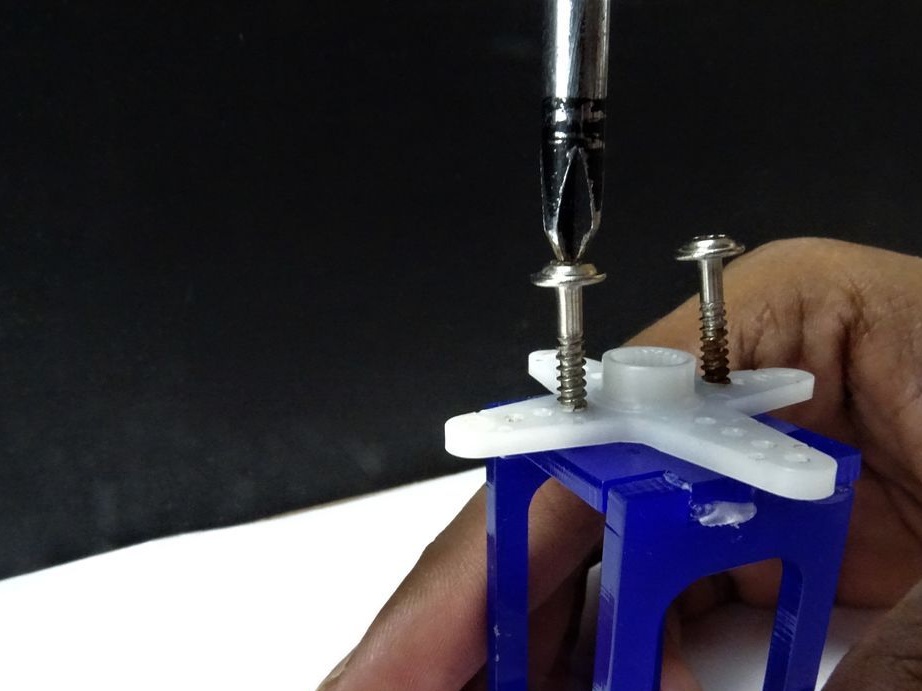
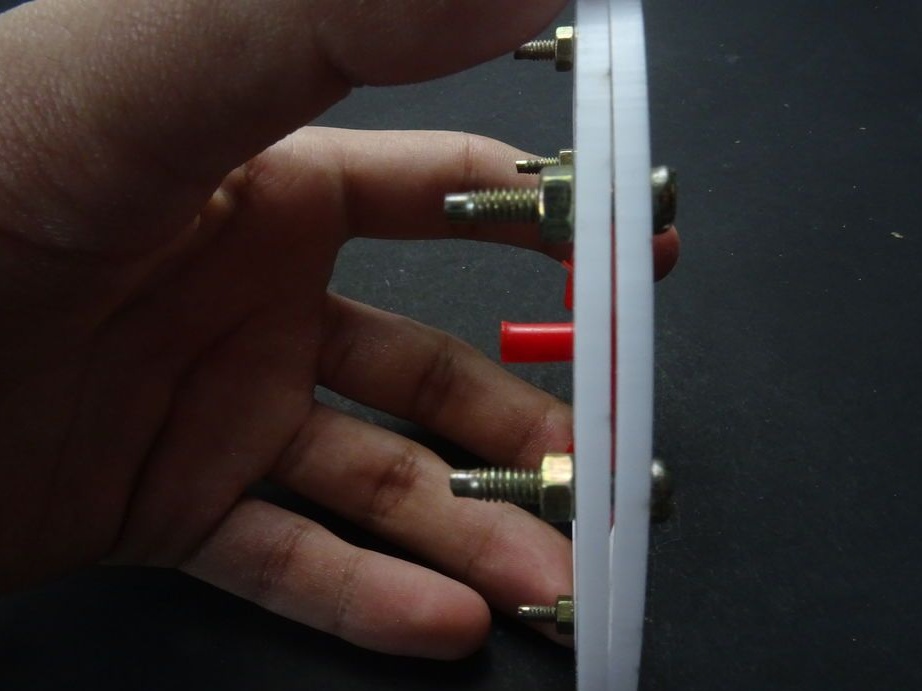
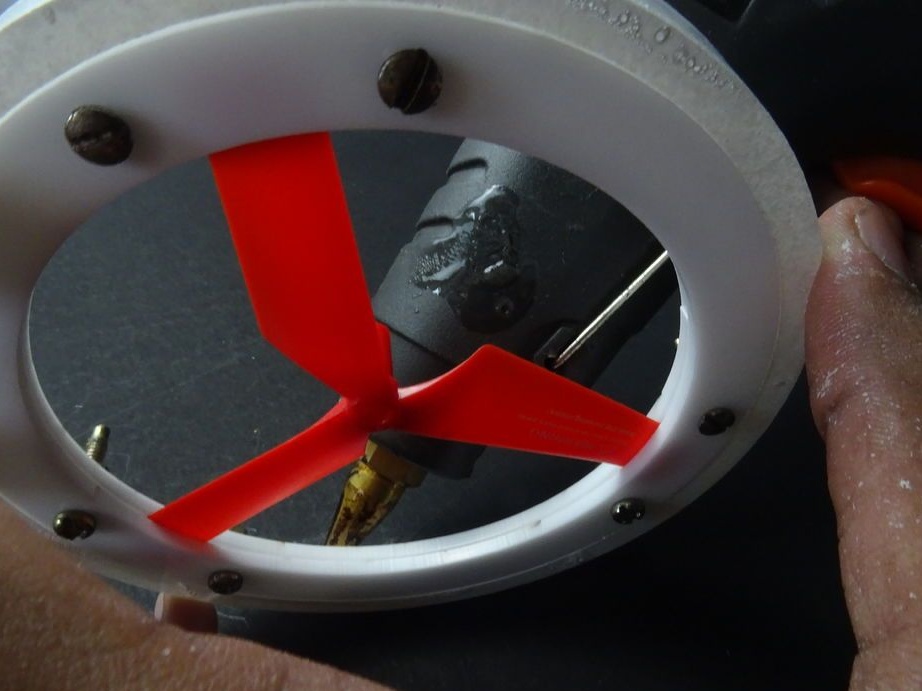
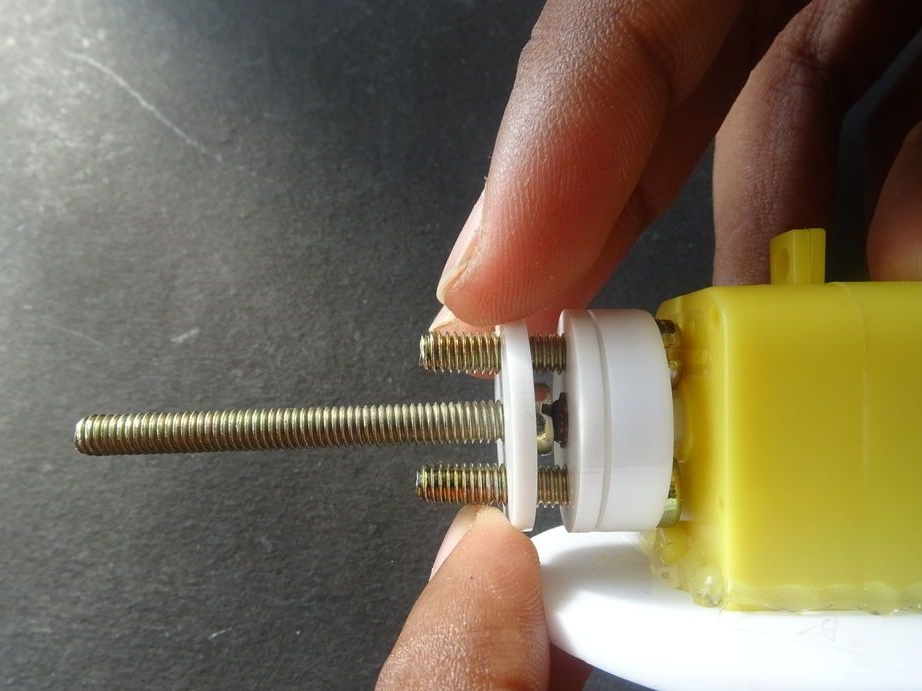
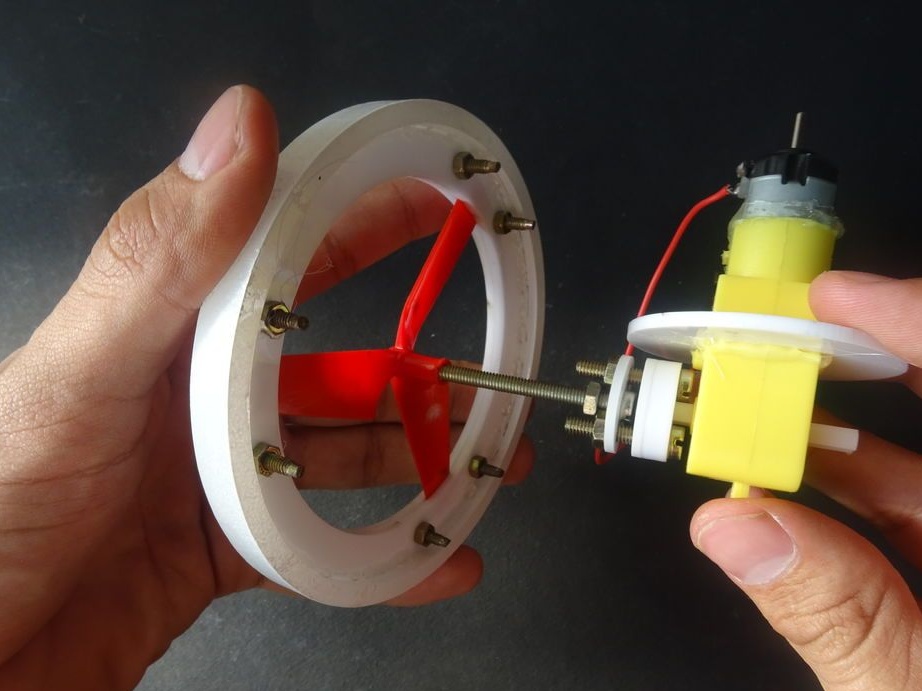
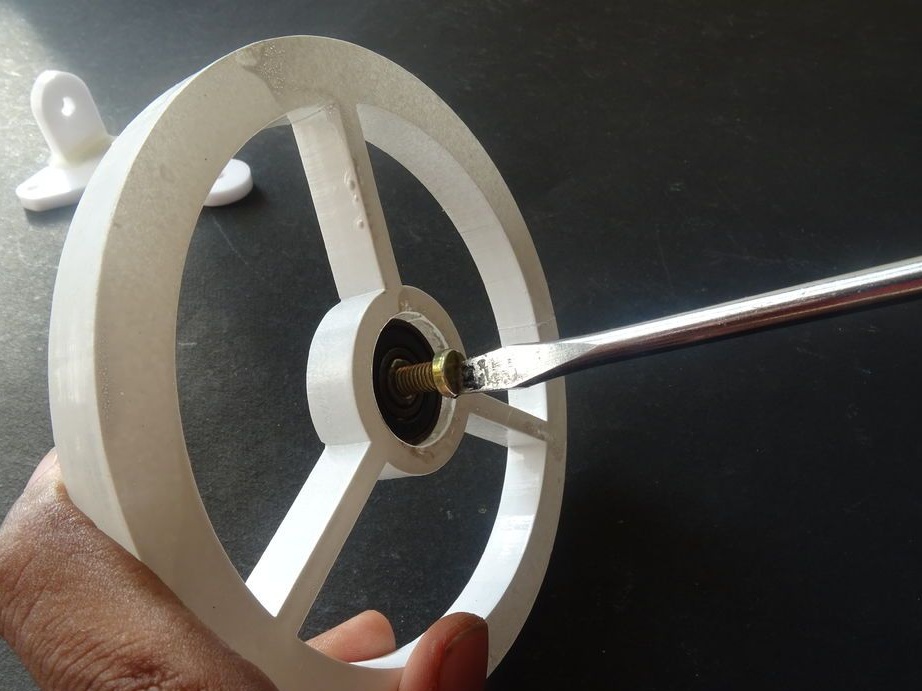
Vienpadsmitā darbība. Riteņu montāža
Uz skrūvēm savāc divu riteņu lokus. Skrūves nav pilnībā pievilktas.




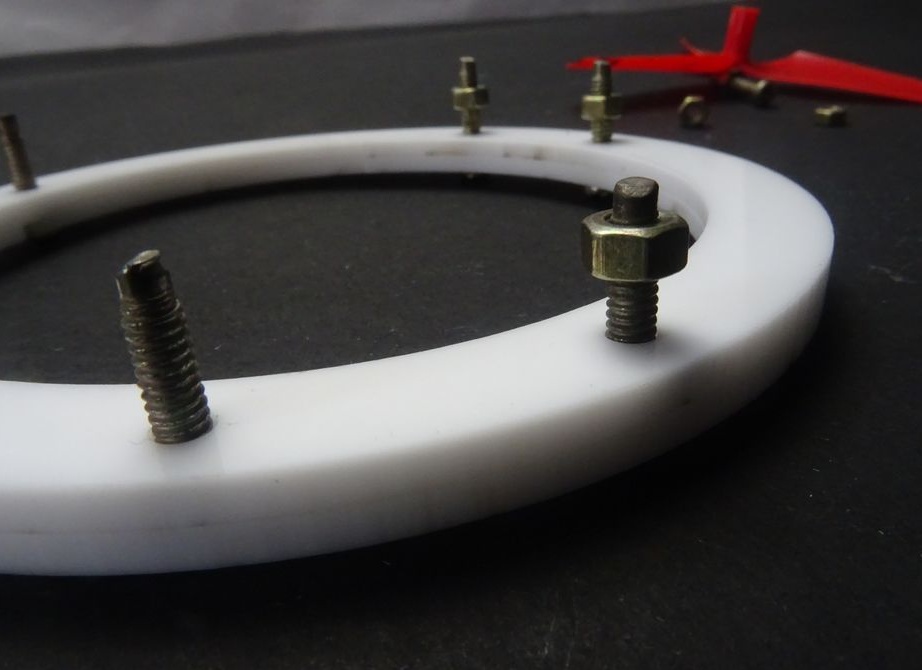
Starp diskiem uzstādiet skrūves un pievelciet skrūves. Uzstādot skrūvi, jums jāizmanto veidne, lai to centrētu.
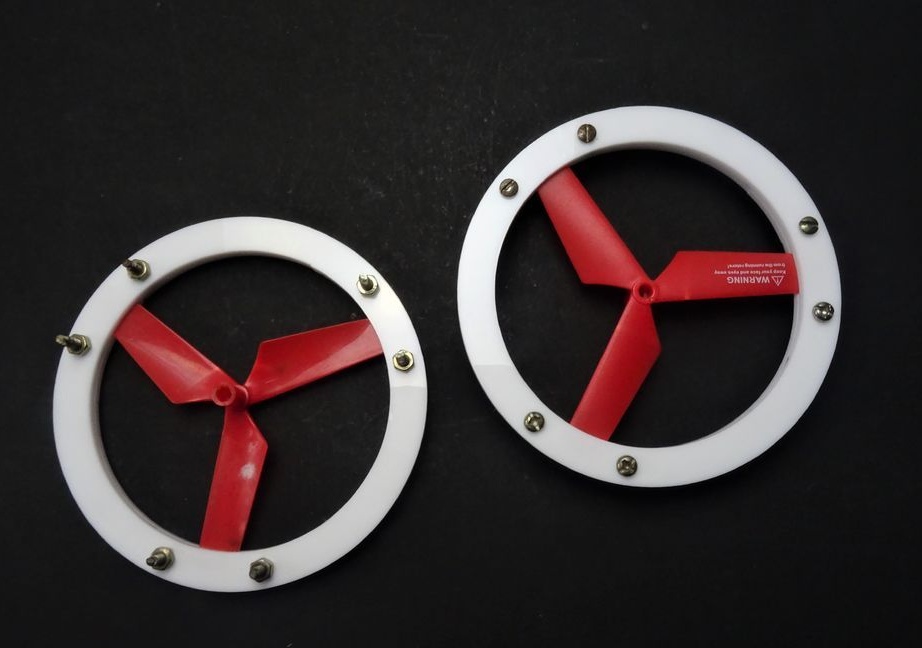
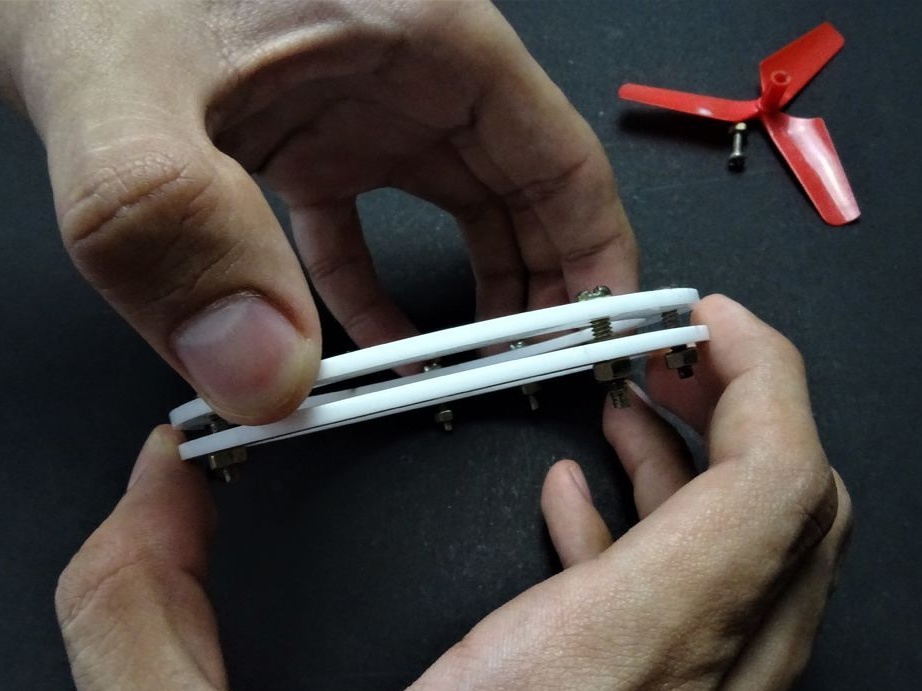
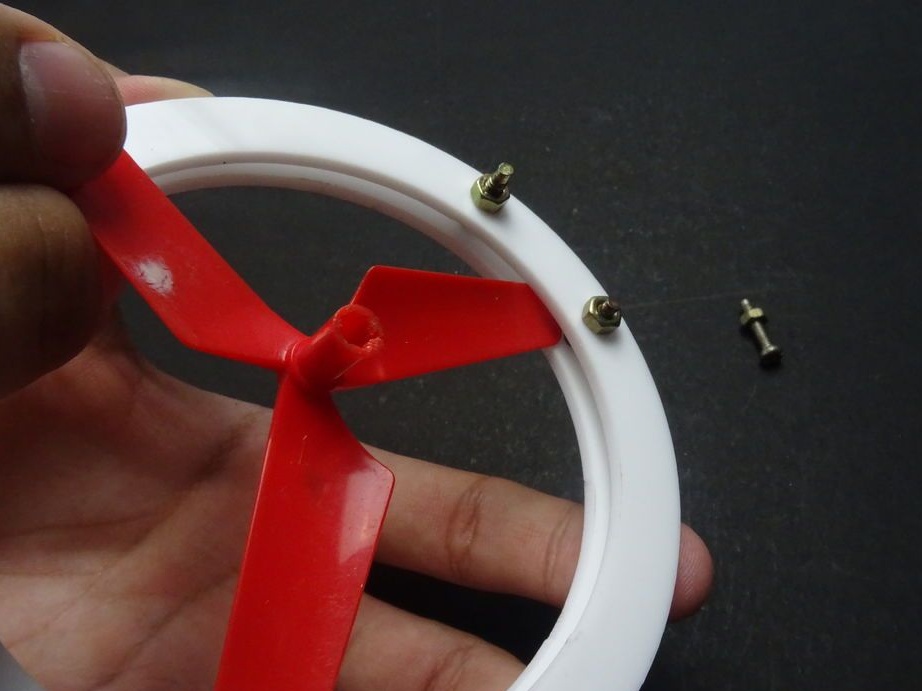
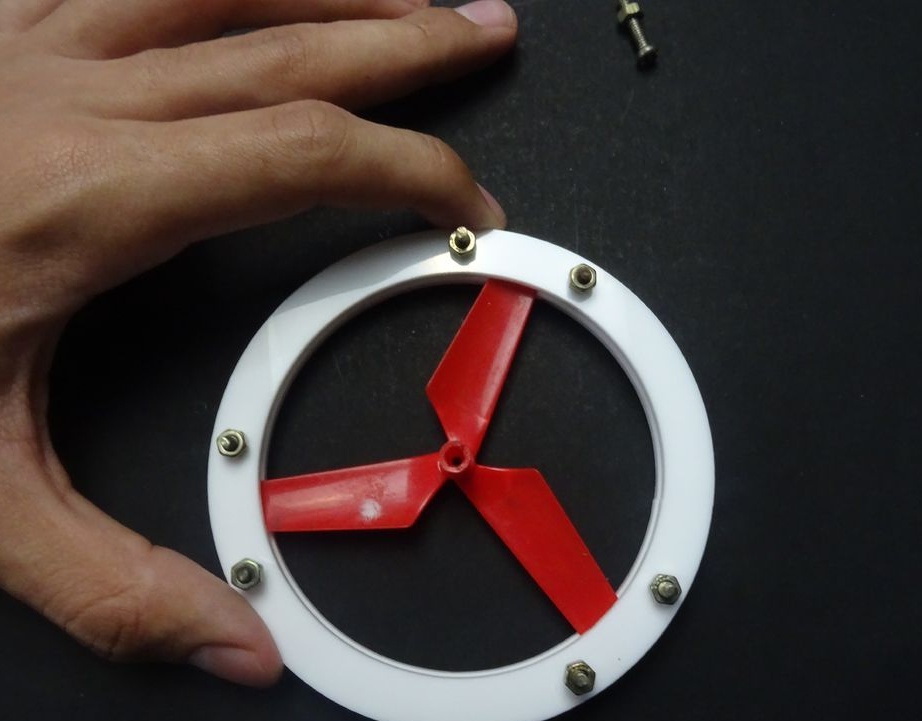

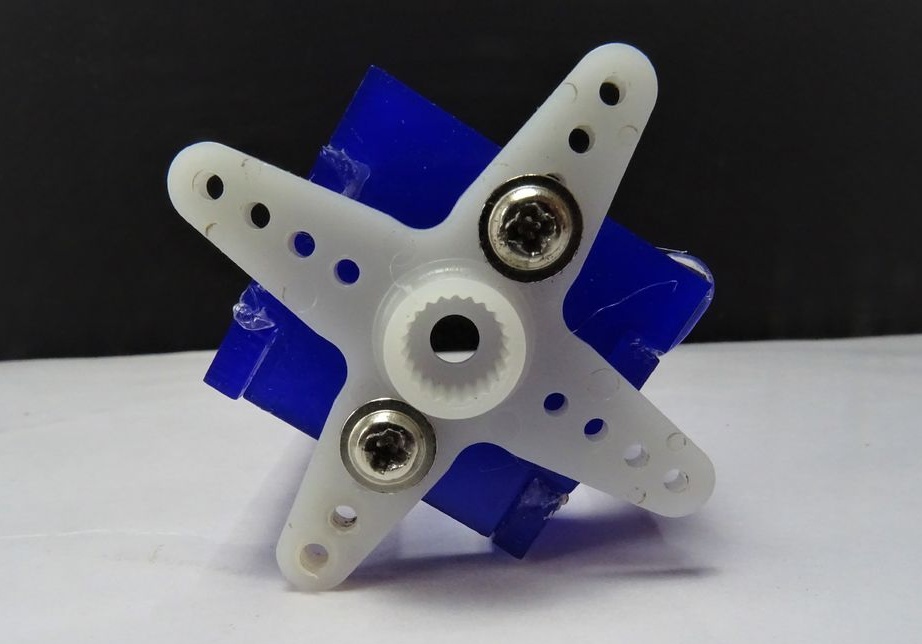
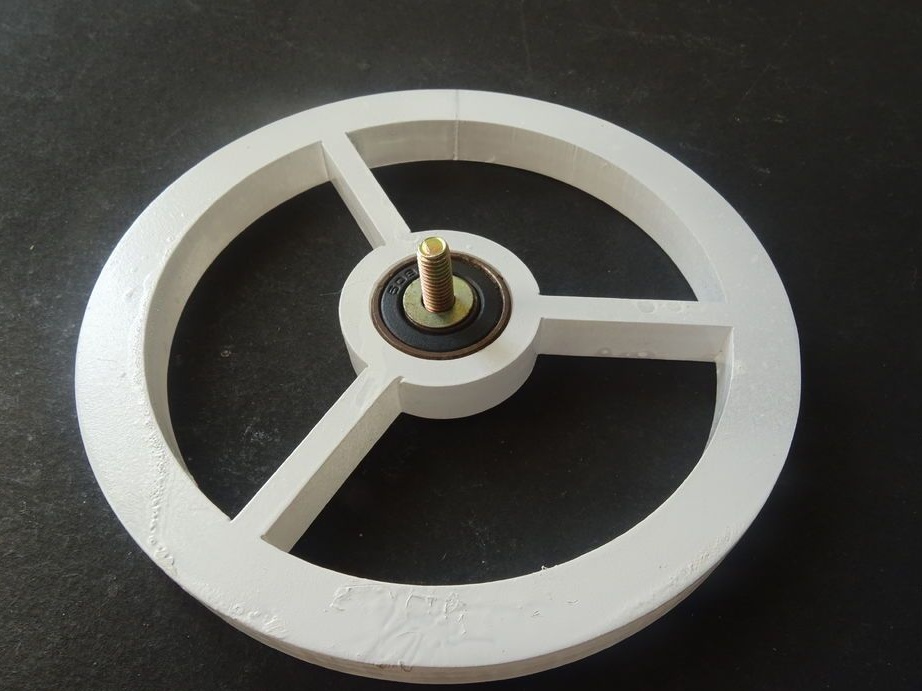
Iestata riteņa ārējo malu. Lokam jābūt vienā līmenī ar iekšējo disku.
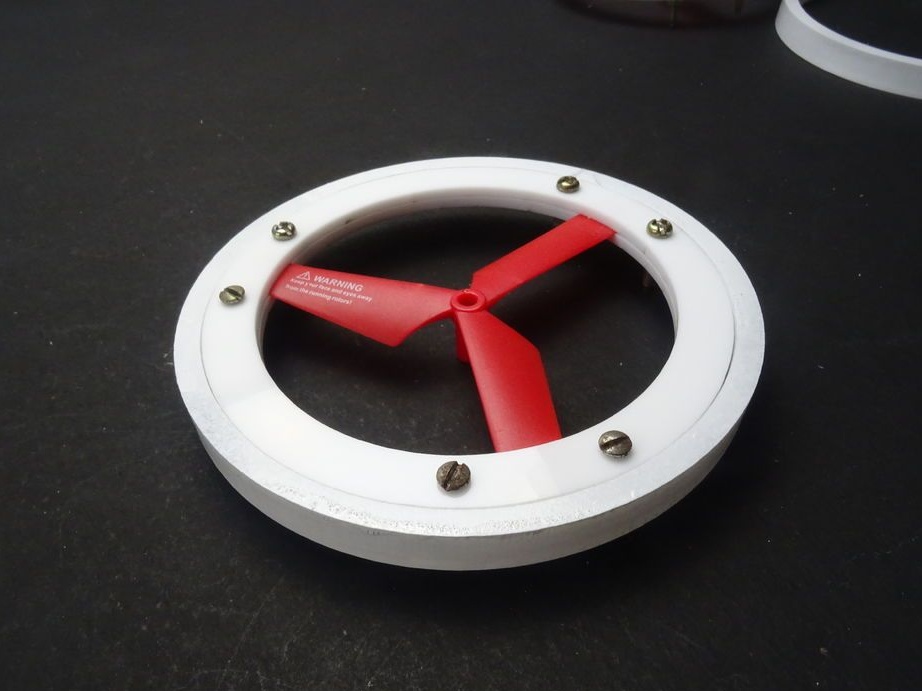

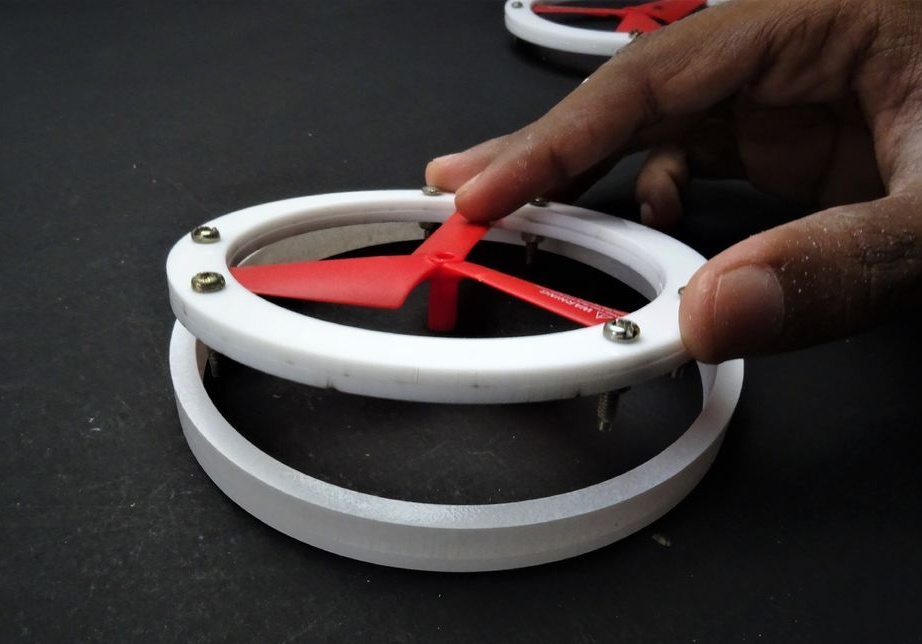
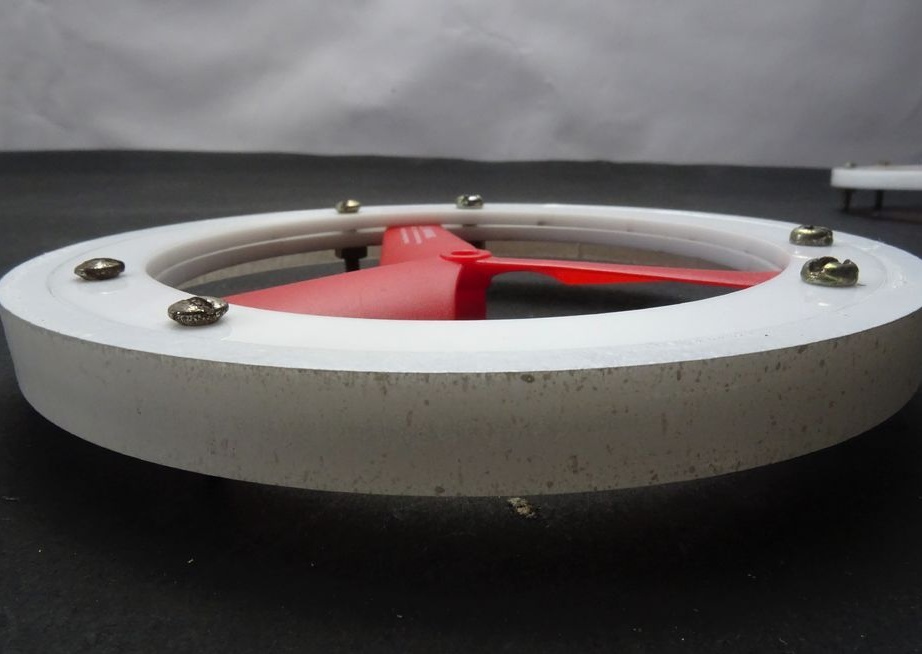

Uz savienojuma uzklājiet karstu līmi.


Tagad savāc priekšējos riteņus.
Piemērota izmēra uzgrieznis aizsērē gultņa iekšējā skrējienā. Iespiež gultņus priekšējos riteņos.
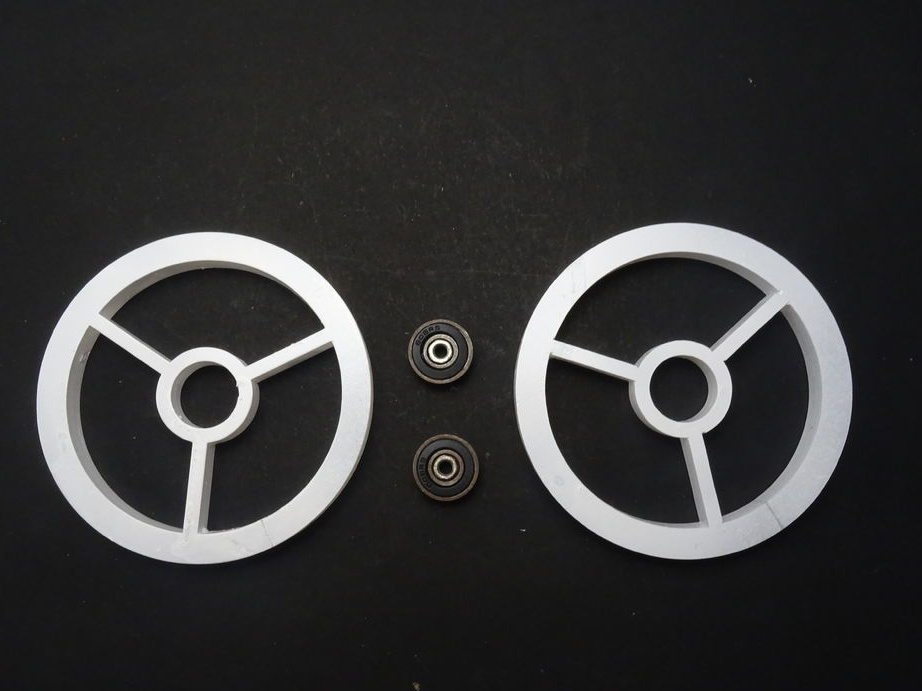



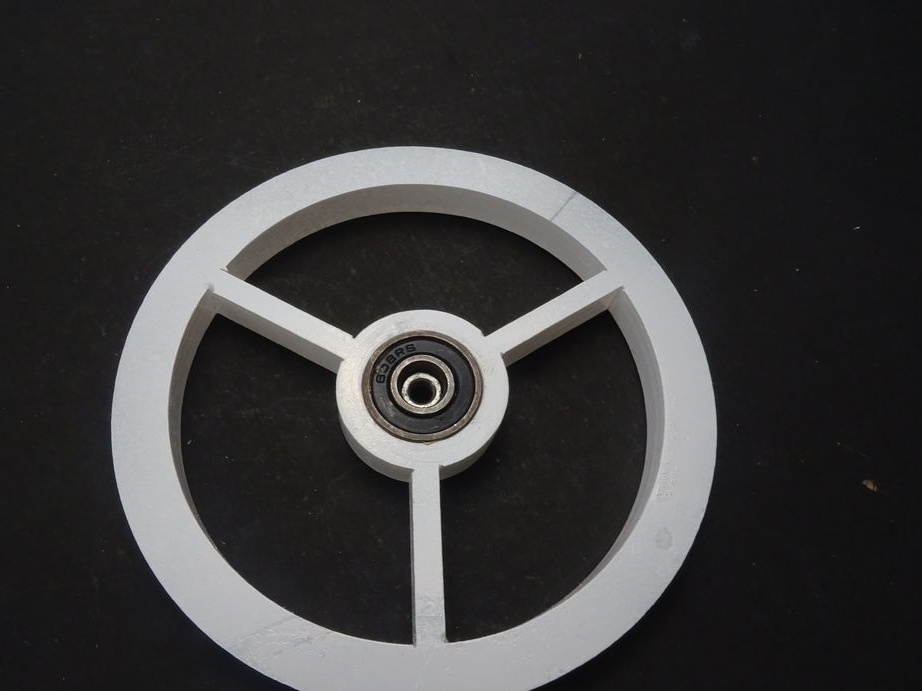
Riteņi ir gatavi.

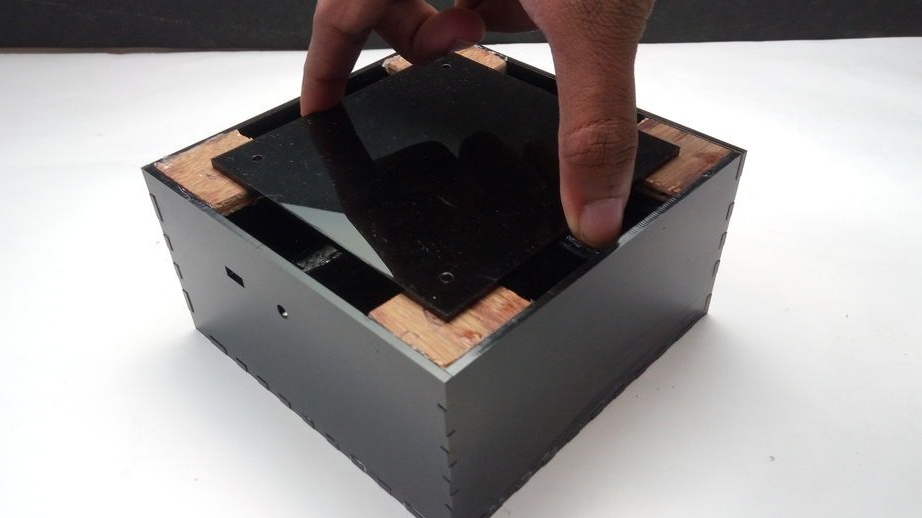
Divpadsmitā darbība: elektronikas korpuss
Līmē elektronikas korpusu.

Šajā lodziņā būs viss elektroniska sastāvdaļas, kas nozīmē, ka tā ir jā hidroizolē pēc iespējas rūpīgāk.


Kastes stūros no dēļa tiek sagriezti un pielīmēti četri kvadrāti. Viņiem tiks piestiprināts kastes vāks.



Trīspadsmit solis: riteņa stiprinājums
Tagad jums ir jāsavieno riteņi un pārnesums ar sajūgu.





Skrūvē priekšējos riteņus vilkšanai.


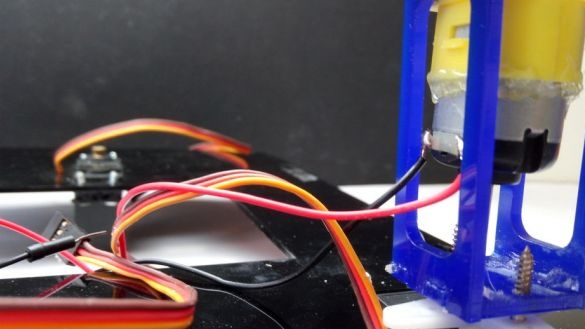
Četrpadsmit solis: pievienojiet elektroniku
Saskaņā ar shēmu tas uzstāda elektriskās daļas.
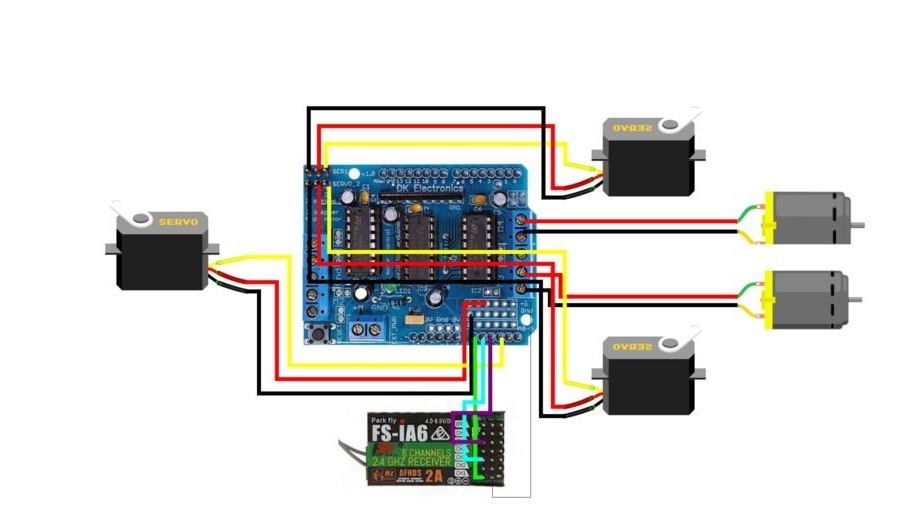

Kreisā dzinēja vadi uz M1, pa labi uz M2. Savieno dzinēja vadītāju. Savieno servos. Uzstāda uztvērēju: uztvērēja gnd - Gnd Arduino; +5 V uztvērējs līdz +5 V Arduino; tapa 3 līdz A0; tapa 1 līdz A1; 5. tapa līdz A2. Pieslēdz akumulatoru.
Piecpadsmit solis: lejupielādējiet kodu
Vispirms jums ir nepieciešams lejupielādēt bibliotēka.
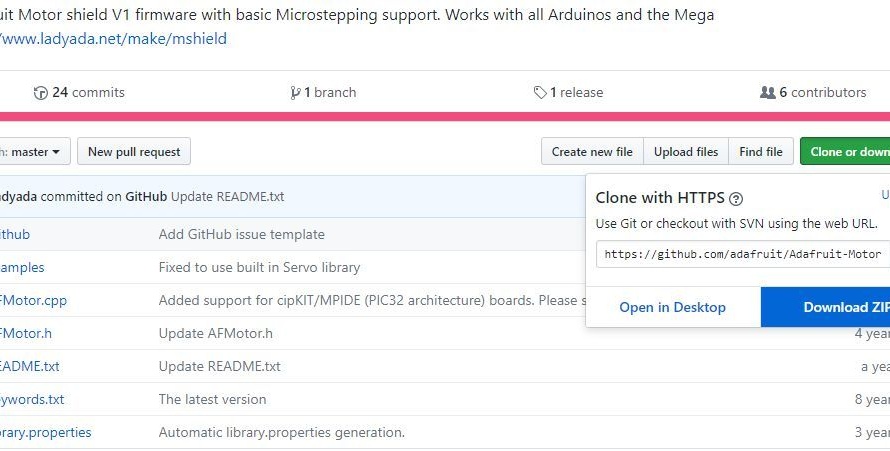
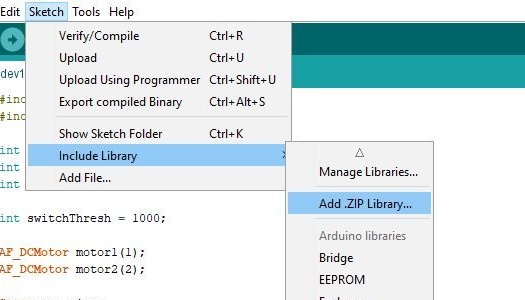
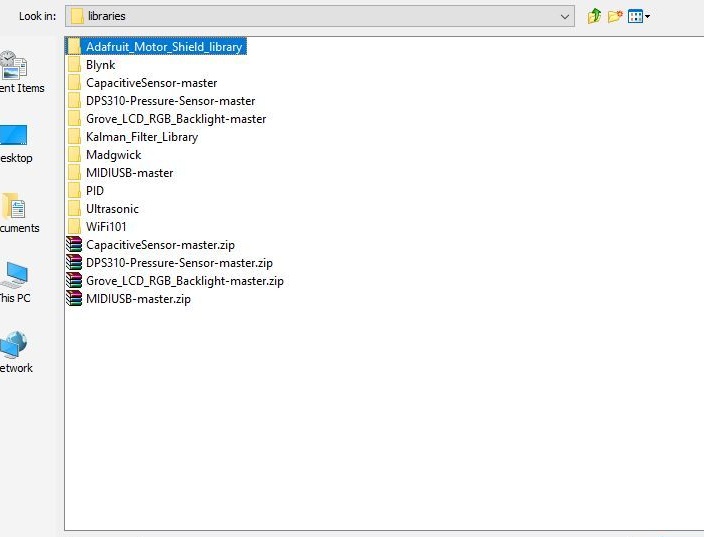
Pēc tam lejupielādējiet kodu. Iekraušanas laikā akumulators ir jāatvieno.
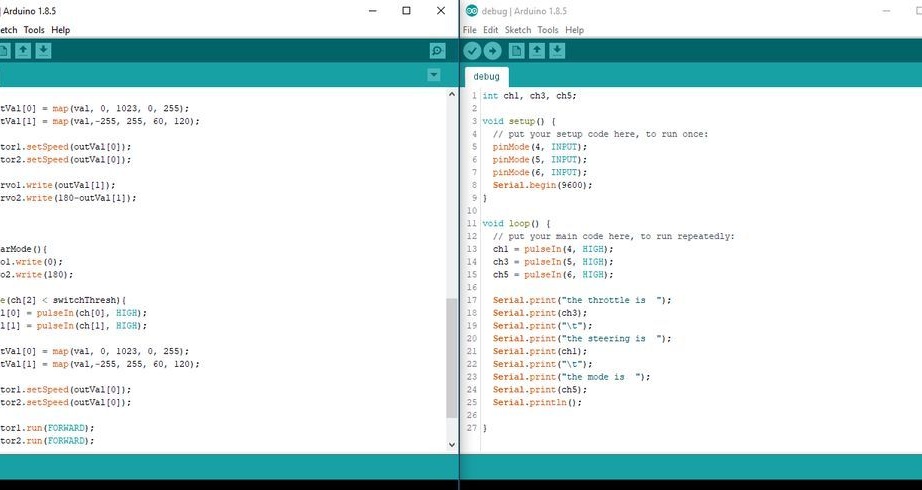
Lejupielādējiet zemāk esošo kodu.
amfībijas_uzdevums_kods.ino
Pēc koda lejupielādes tas pārbauda motoru un piedziņu darbību.
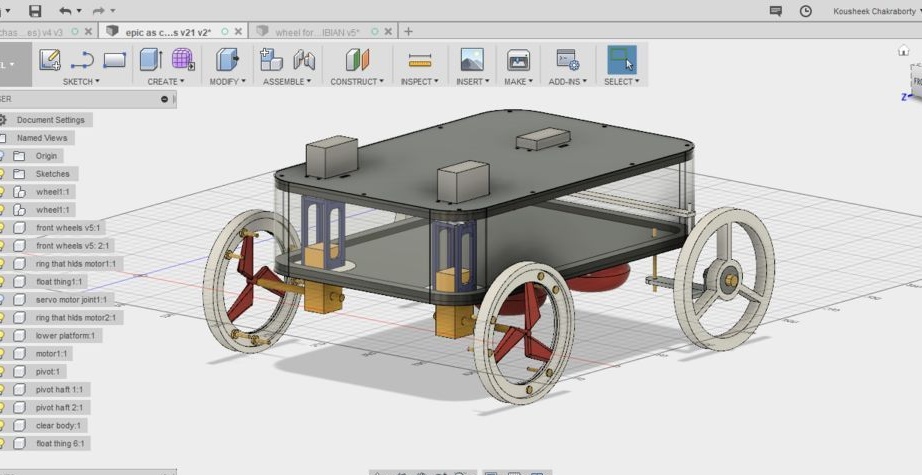
Sešpadsmit solis: montāža
Tagad ir laiks salikt visurgājēju.
[centrs[/ centrs]
Instalē servos. Instalē reduktordzinējus.

Nostiprina riteņus. Savelk abas ķermeņa puses.






Viss ir gatavs, un tagad jūs varat pārbaudīt.