

Laba diena visiem dārgajiem draugiem! Šodienas rakstā es gribētu parādīt diezgan interesantu mājās gatavots, proti, pašdarināts kvadrocopters. Ja jums patīk lidmašīnu modelēšana, bet jums ir diezgan grūti salikt lidmašīnu, varat sākt ar kvadrocopteru. Šajā rakstā tiks detalizēti aprakstīts, kā salikt pašmāju četrkodolu. Šī montāža sastāvēs no lētākajiem komponentiem, kas iegādāti Ķīnas veikalos. Protams, šis mikro kvadrocopters nevarēs lepoties ar savām lidojuma īpašībām un pat ar dažiem citiem parametriem. Bet tas palīdzēs jums apgūt pareizo masas atrašanās vietu lidojošajā ierīcē, pamata iestatījumus un kvadrocoptera pamatfunkcijas. Ak, labi, pietiek ar garo priekšvārdu, iesim!
Un tā, šim pašmāju izstrādājumam mums ir nepieciešams:
- elektromotori 4 gab. (2gab CW un 2gab CCW tiek pārdoti 4gab komplektā.)
- piemērotas skrūves elektromotoriem 4 gab.
- Piemērota izmēra 3,7 V akumulators.
- akumulatora uzlādes kabelis.
- vadības pults.
- vadības paneļa aprīkojums.
- ABS plastmasas loksne (varat izmantot kastīti no DVD diska).
- vadi.
- termiņu saraušanās.
No rīkiem, kas mums būs nepieciešami arī:
- lodāmurs.
- pārrakstīšanās nazis.
- urbis.
- urbji.
- lineāls.
- marķieris.
- dubultā līmlente.
- terma līme.
- superlīme.
Pirmkārt, mums vajadzētu izgatavot rāmi, uz kura montēs kvadrocopters. Rāmja ražošanai mums jāņem plastmasas loksne, vispiemērotākā ir ABS plastmasa, jo tā ir ļoti viegla, kas ir ļoti piemērota mikro kvadrocopteram. Bet, ja jums šādas plastmasas nav, tad perfekta ir kastīte no DVD diska vai pārtikas konteinera.

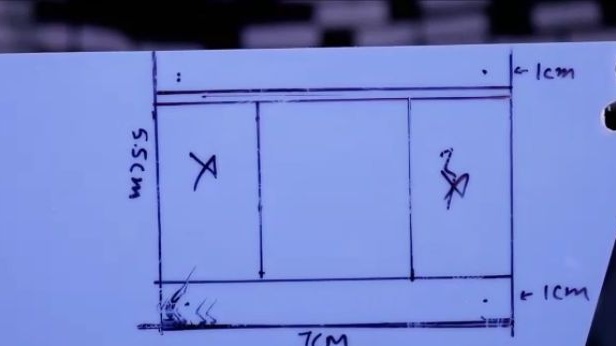
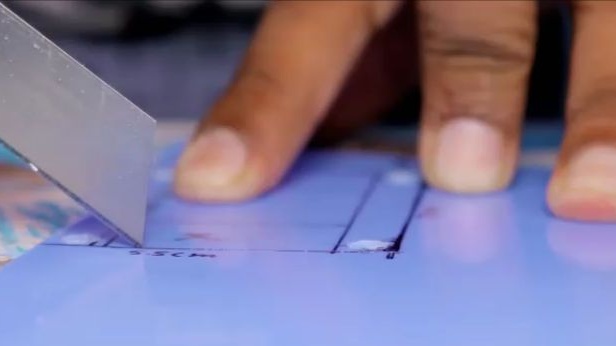
Pēc rāmja plastmasas apstrādes uz pašas plastmasas mēs veidojam aptuveni līdzīgas atzīmes, piemēram, tās, kas parādītas zemāk esošajā fotoattēlā. Jums jāpievērš uzmanība arī atzīmētajiem punktiem, šajās vietās tiks uzstādīti elektromotori, kas nozīmē, ka tie ir jāmarķē pēc iespējas precīzāk un simetriski.
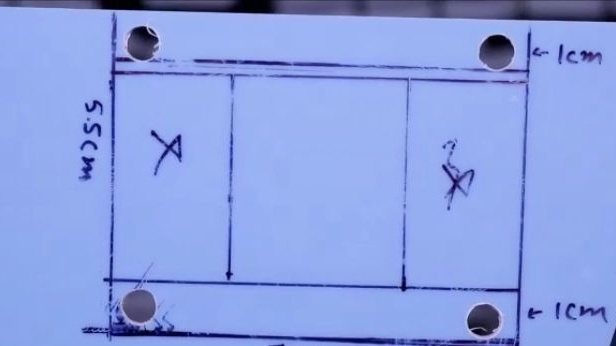
Nākamais solis ir urbt caurumus motoru montāžai. Šis ir ļoti svarīgs posms, jo no tā būs atkarīga kvadrocoptera vadāmība un vispārējā izturēšanās. Urbšanai labāk ir izmantot pakāpju urbi, viņiem būs ļoti ērti izdarīt skaidru kontūru. Bet, ja tāda jums nav, tad jums vienkārši jāņem piemērota diametra urbis, tas ir, urbja diametram vajadzētu sakrist ar elektromotora diametru.

Tad mums ir jāizgriež pats rāmis.Mēs sagriezīsim, izmantojot pārrakstīšanas nazi. Es iesaku to izdarīt, izmantojot lineālu, uzliekot lineālu, cieši nospiežot, turot ar nazi un nolaužot, saliekot plastmasu. Centieties to darīt pēc iespējas uzmanīgāk.
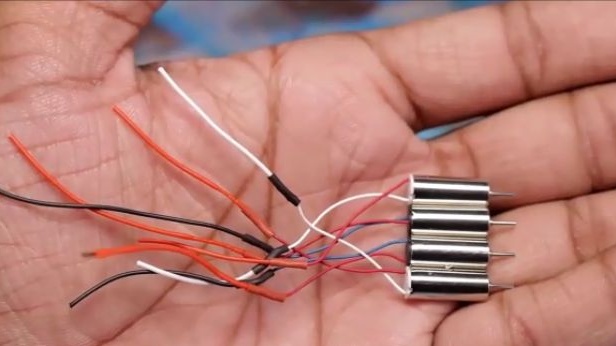
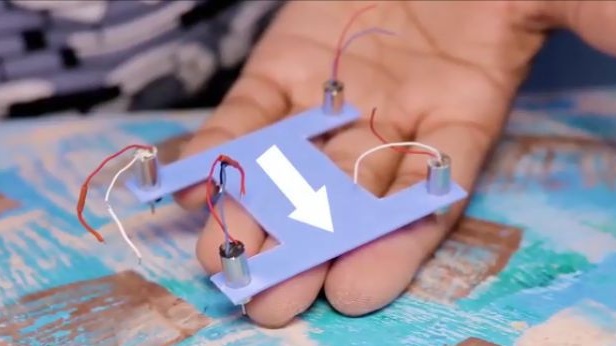
Pāriesim pie elektromotoru uzstādīšanas. Tas nav tik vienkārši, kā varētu šķist, jo iegādātajā ķīniešu komplektā ir 2 CW formāta un 2 CW motori. Bet vispirms mēs palielinām vadu garumu uz elektromotoriem, jo to garums mums vienkārši nebūs pietiekams. Lodiet 3-4 cm stieples segmentus un izolējiet terminu ar saraušanos.
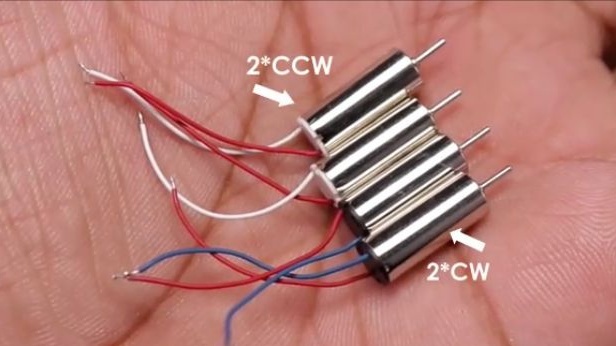
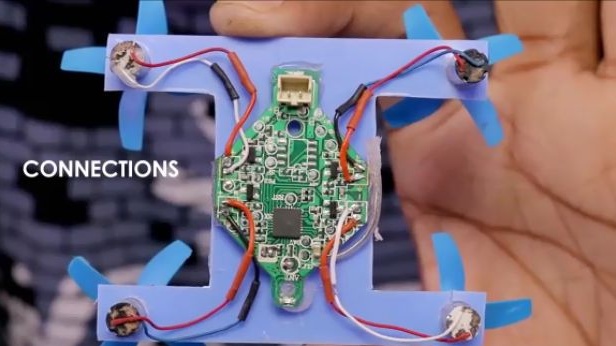
Zemāk redzamajā attēlā parādīts, kā uzstādīt elektromotorus. Attēlā redzamā bultiņa norāda uz kvadrocoptera priekšpusi. Un uzstādiet elektromotorus atbilstoši attēlam.
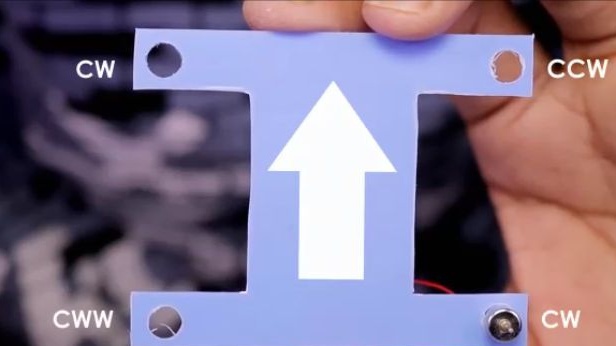
Nākamais solis ir skrūvju uzstādīšana uz motora vārpstām. Arī šeit nav tik vienkārši. Ja jūs rūpīgi aplūkojat skrūvi, tad uz tā jūs varat redzēt uzrakstu "B1" vai "A2". Ko tas nozīmē, ka uz motora ar CW jāuzstāda skrūve ar vērtējumu "B1", bet uz CCW motora - skrūve "A2".
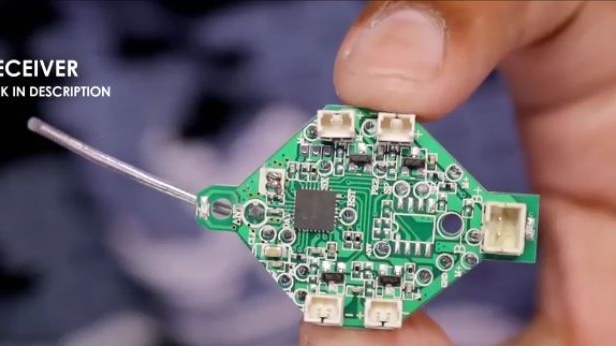
Tad mēs ņemam kvadriciklu vadības paneli un no tā atvieno visus elektromotoru savienotājus.



Vadības pults stingri jāpielīmē pie kvadrocoptera rāmja, kā norādīts zemāk esošajā fotoattēlā. Un šī dēlis jāuzstāda, izmantojot līmes terminu, protams, labāk būtu skrūvēt dēli ar skrūvēm, taču skrūves ir daudz smagākas nekā pāris pilieni līmes termina.
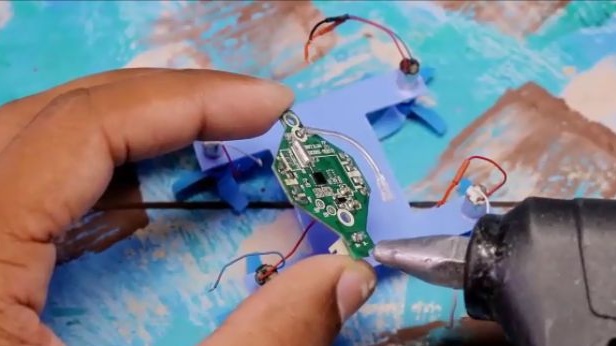
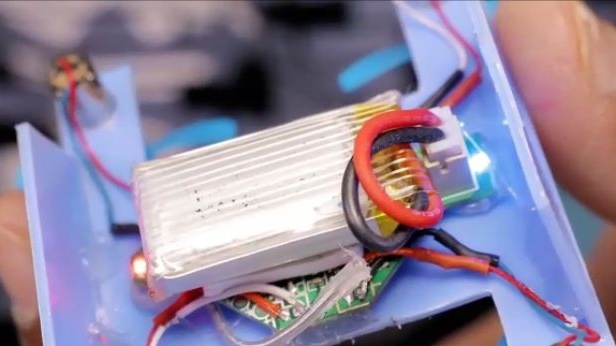
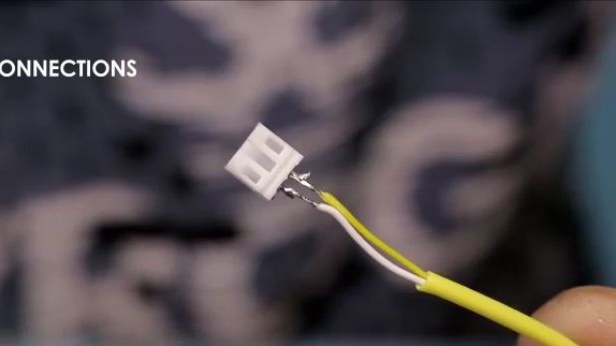
Lodēt kontaktus no elektromotoriem uz vadības paneli tādā pašā veidā, kā parādīts zemāk esošajā fotoattēlā.
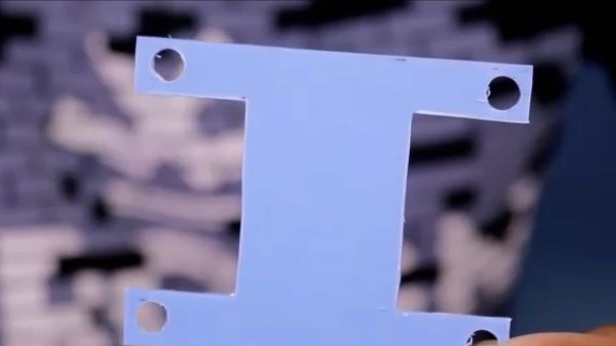
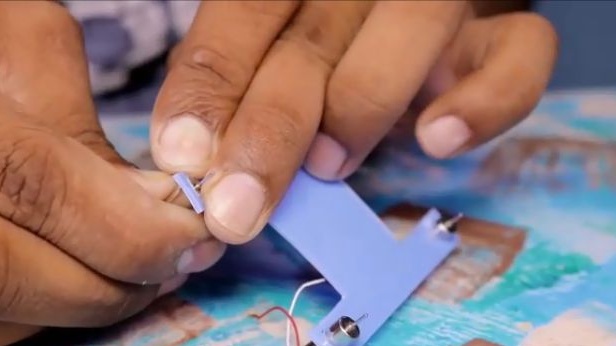
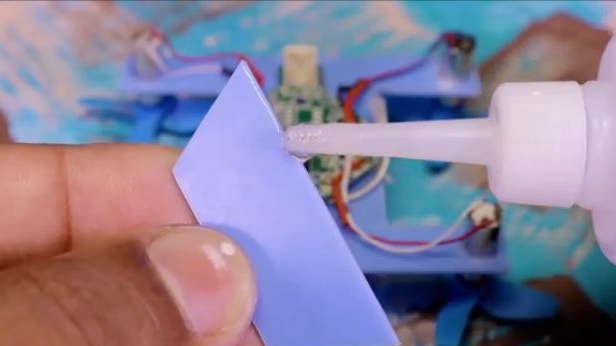
Tālāk no tās pašas plastmasas mēs izgriezām piemērotu trapecveida. Mums vajag 2 gabalus šādu sagatavi. Viņi izpildīs abu kāju un quadrocopter aizsardzības lomu.

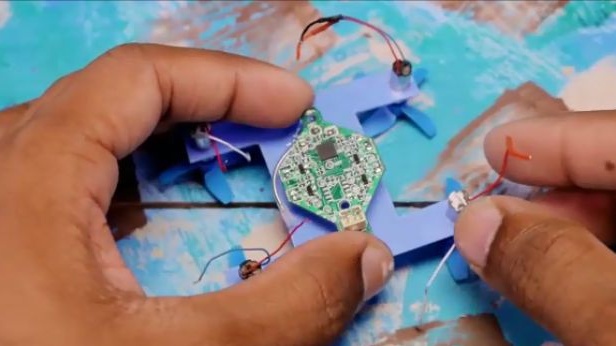
Grieztais trapecveida jāpielīmē norādītajās vietās. Vislabāk līmējiet uz superlīmes. Mēs uzliekam superlīmi uz trapecveida, pagaidiet apmēram vienu minūti, uzklājiet to uz rāmja un gaidiet, līdz līme iestatīsies.


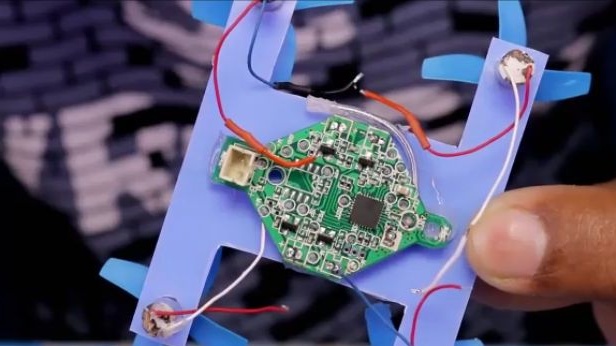
Tad mums vajadzētu salabot akumulatoru uz korpusa, mēs piestiprināsim, izmantojot dubultā lenti.
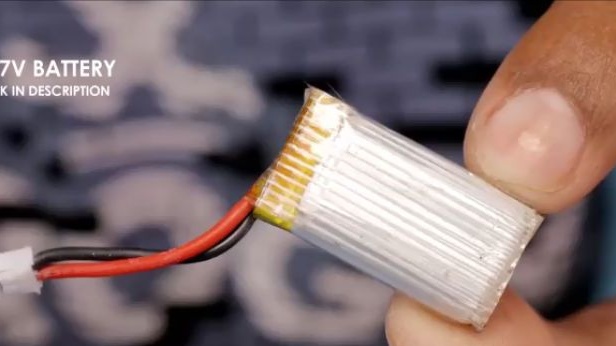

Mēs ievietojam savienotāju no akumulatora vadības panelī, un, ja iedegas zils LED, tad viss ir kārtībā.
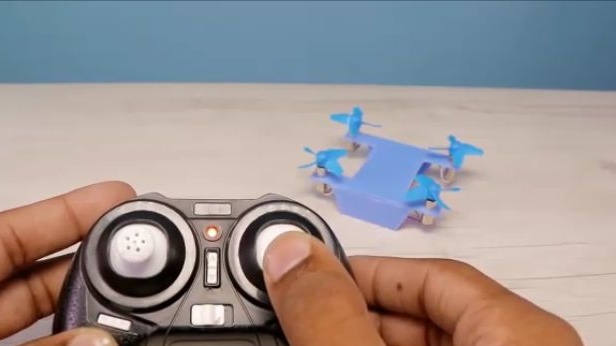
Pēc vadības paneļa ieslēgšanas ieslēdziet aprīkojumu. Pārvietojot nūjas, aprīkojums tiek savienots ar vadības paneli, un zilā gaismas diode pārstāj mirgot.

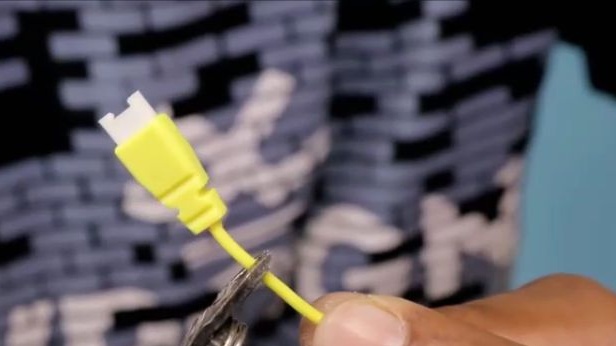
Jums vajadzētu padomāt par mūsu mikro kvadrocoptera akumulatora uzlādi. Lai to izdarītu, paņemiet gatavu USB kabeli ar uzlādes moduli. Bet, tā kā savienotāji nederēja, pašmāju izstrādājuma autors savienotājus vienkārši pielodēja.
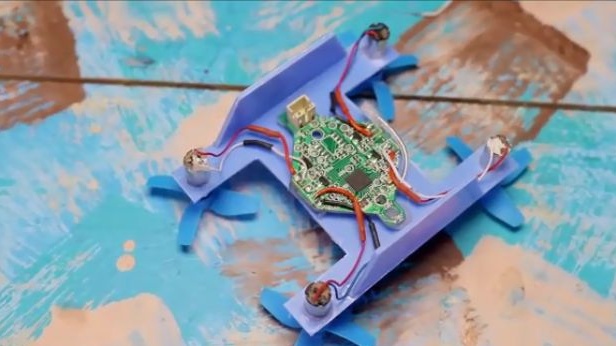
Viss ir gatavs! Tagad atliek pielāgot katra dzinēja ātrumu un izbaudīt lidojumu. Jāpiebilst arī, ka, lai iedarbinātu elektromotorus, ir jāsamazina nūjas līdz centram, un motori sāks griezties ar minimālo ātrumu. Rezultātā mēs saņēmām smieklīgu kvadrocopteru, ar kuru būs interesanti spēlēt gan ar bērnu, gan ar pieaugušo, jo viņš zina, kā veikt apvērsumus un diezgan ātri lidot.

Šeit ir autora video ar detalizētu šī pašdarinātā izstrādājuma montāžu un testēšanu:
Nu, paldies visiem par uzmanību un veiksmi turpmākajos projektos, draugi.