Šajā instrukcijā mēs apskatīsim, kā izgatavot ļoti vienkāršu kvadrocopteru. Nav sarežģītas elektronikas, sensoru vai kaut kas cits. Vienīgā elektronika ir kontrolieris, ar kura palīdzību jūs varat vadīt kvadrocopteru pa gaisu. Tās jauda ir pietiekama, lai paceltu mazu kameru. Celtspēja lielā mērā būs atkarīga no izmantotajiem materiāliem, motora jaudas un dzenskrūves lieluma.
Lai atvieglotu dizainu, karsto līmi var aizstāt ar superlīmi, dažās vietās sagriezt dažas rāmja daļas, padarīt motora stiprinājumus šaurākus un tā tālāk.
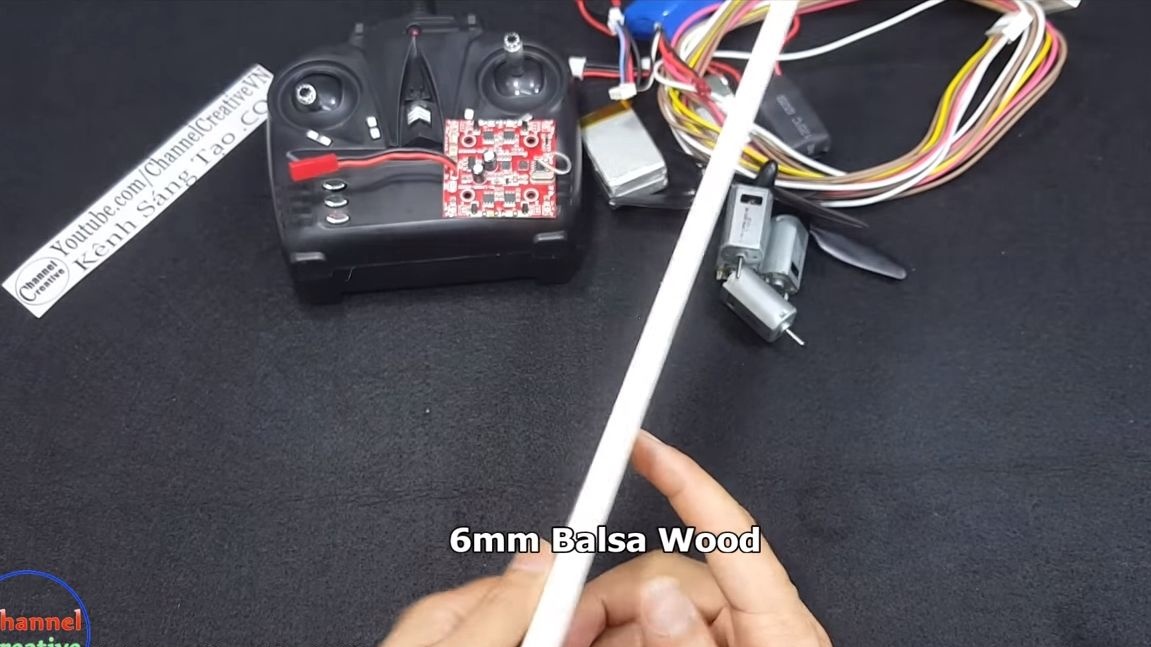
Autors kā galveno rāmja izgatavošanas materiālu izmantoja balsa. Šis koks ir viegls, ar to ir viegli strādāt, un materiālam ir pietiekama izturība mājās gatavots. Motori ir uzstādīti uz stiprinājumiem, kas izgatavoti no lokšņu alumīnija.
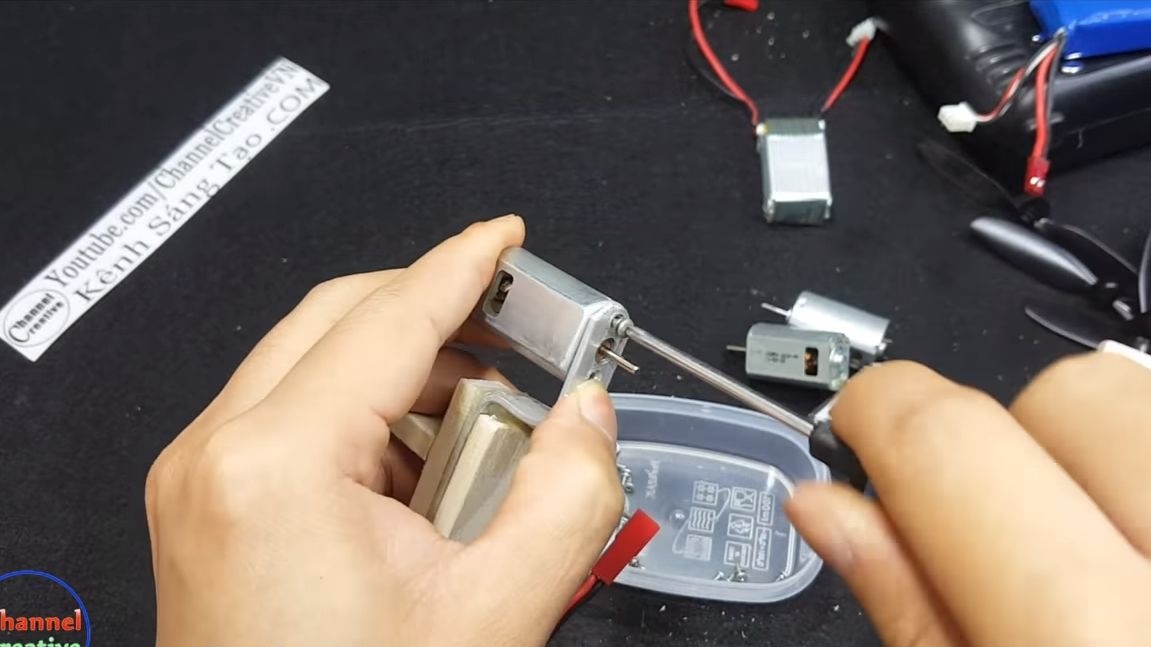
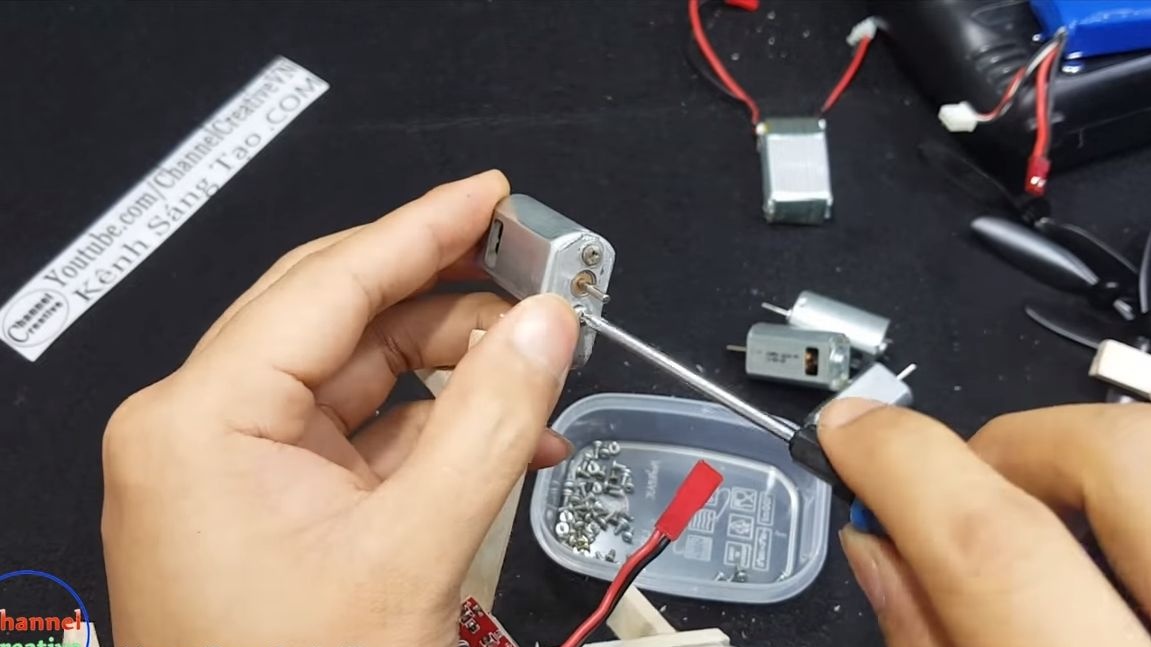
Kā dzinēji šeit tika izmantoti četri 180 modeļa dzinēji, tie darbojas kopā ar 10 cm skrūvēm. Projektācijā tiek izmantotas divas “labās” un divas “kreisās” skrūves, tās ir uzstādītas pa diagonāli.
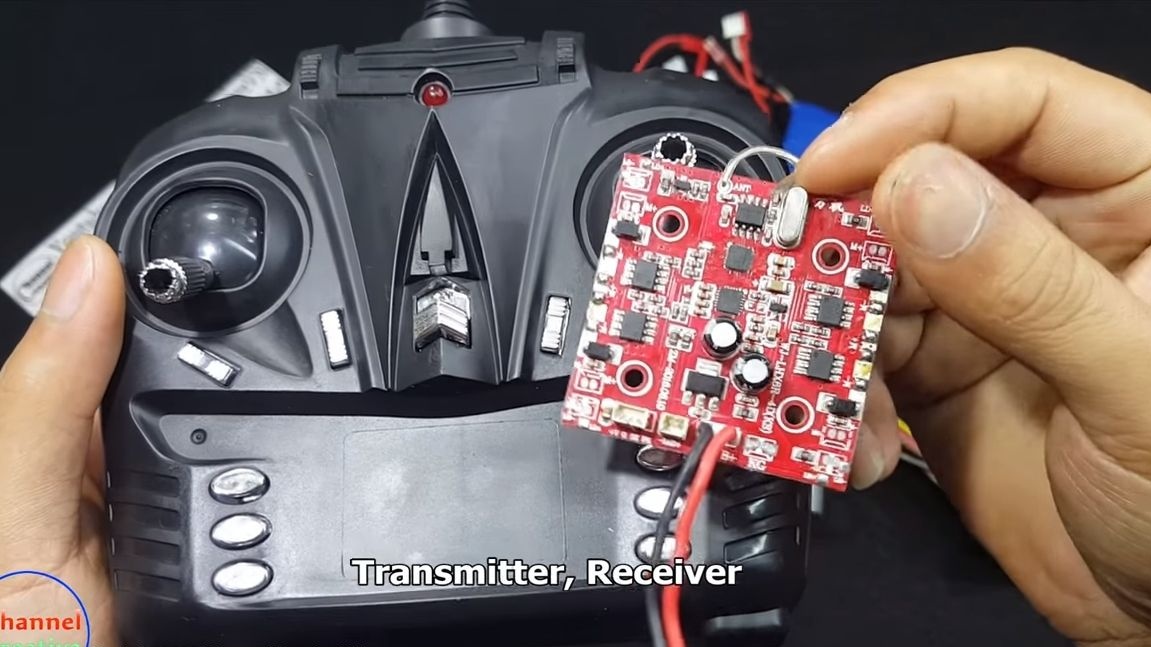
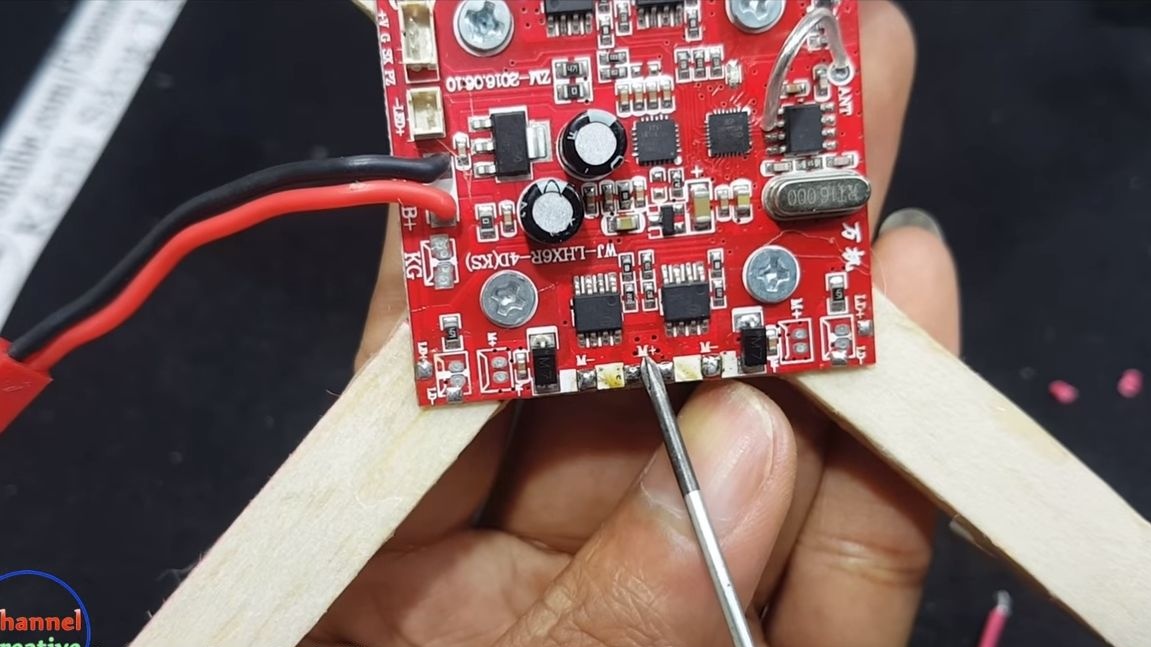
Kā vadības elektronika tika nolemts izmantot WJ-LHX6R-40 plati.
Tātad, mēs sākam montāžu.
Materiāli un instrumenti, ko izmantoja autore:
Materiālu saraksts:
- balsa dēlis ar biezumu 6 mm;
- alumīnija stūris (kā lokšņu alumīnija avots);
- ;
- (divi pa labi un divi pa kreisi 10 cm);
- (WJ-LHX6R-40);
- baterijas;
- vadi;
- plastmasas saites;
- zobrati un citas lietas.




Instrumentu saraksts:
- urbis;
- metāla zāģis;
- pārrakstīšanās nazis;
- lineāls;
- zīmulis;
- līmes pistoli;
- šķēres;
- lodāmurs.
Quadrocopter ražošanas process:
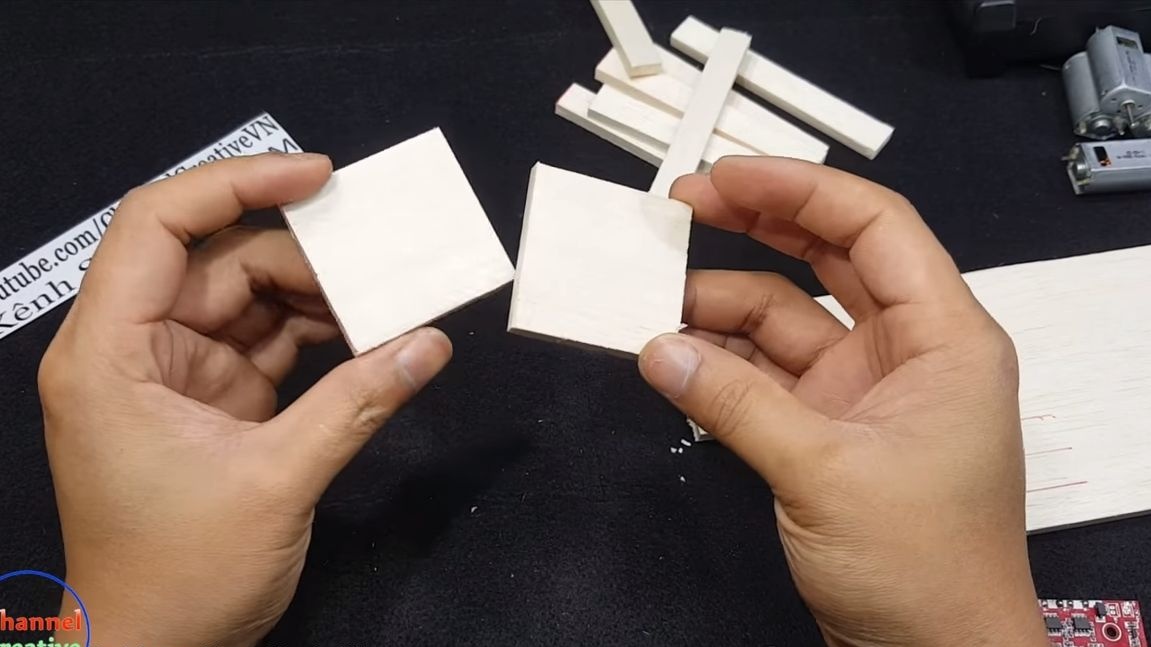
Pirmais solis. Rāmja centrālās daļas izgatavošana
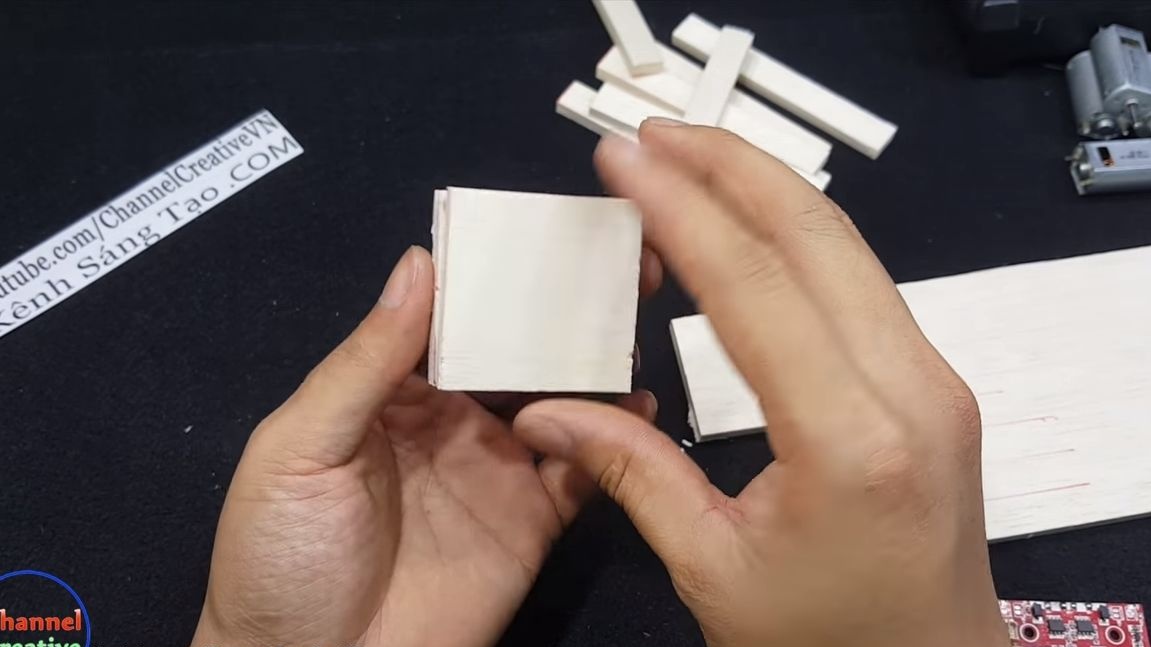
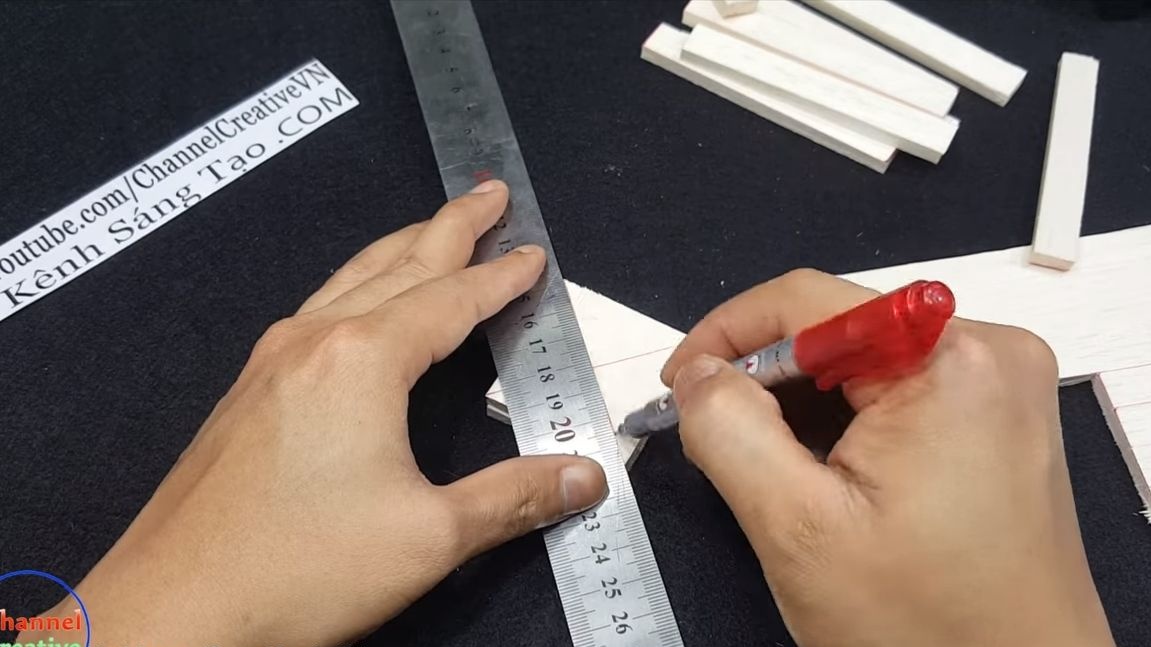
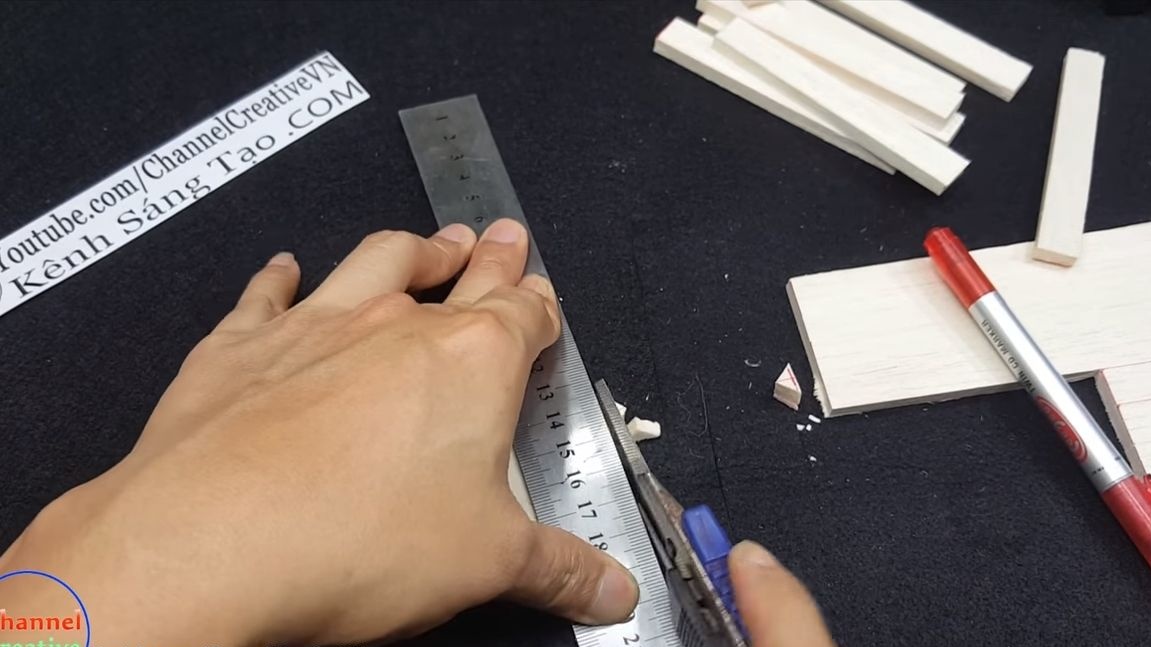
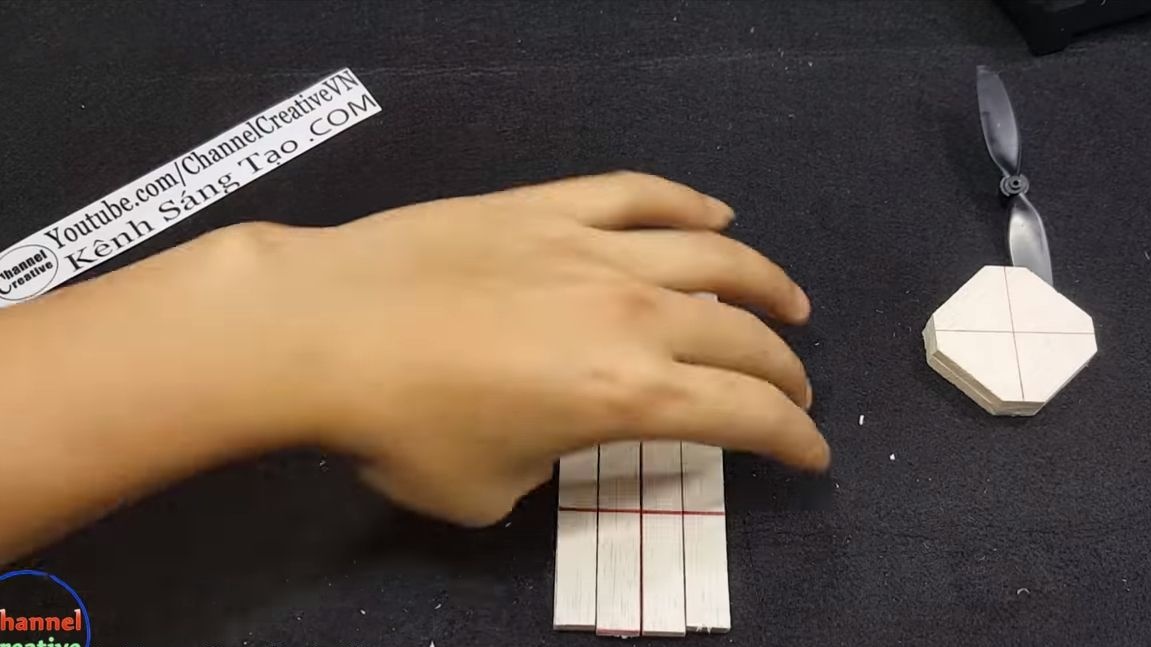
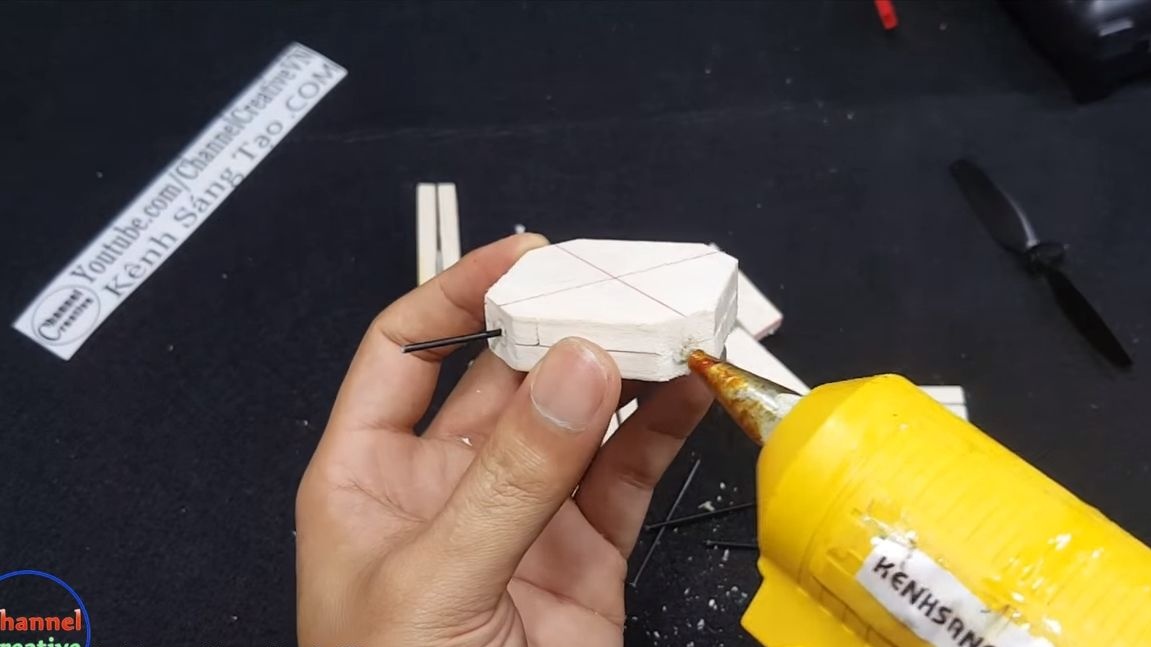
Lai izgatavotu šo daļu, no balsa vajadzēs izgriezt divus kvadrātus un salīmēt tos kopā, izmantojot karstu līmi. Detaļas lielums tiek izvēlēts atkarībā no izmantotā kontrollera un bateriju izmēriem. Quadcopter jābūt labi līdzsvarotam, visa krava ir skaidri novietota centrā.
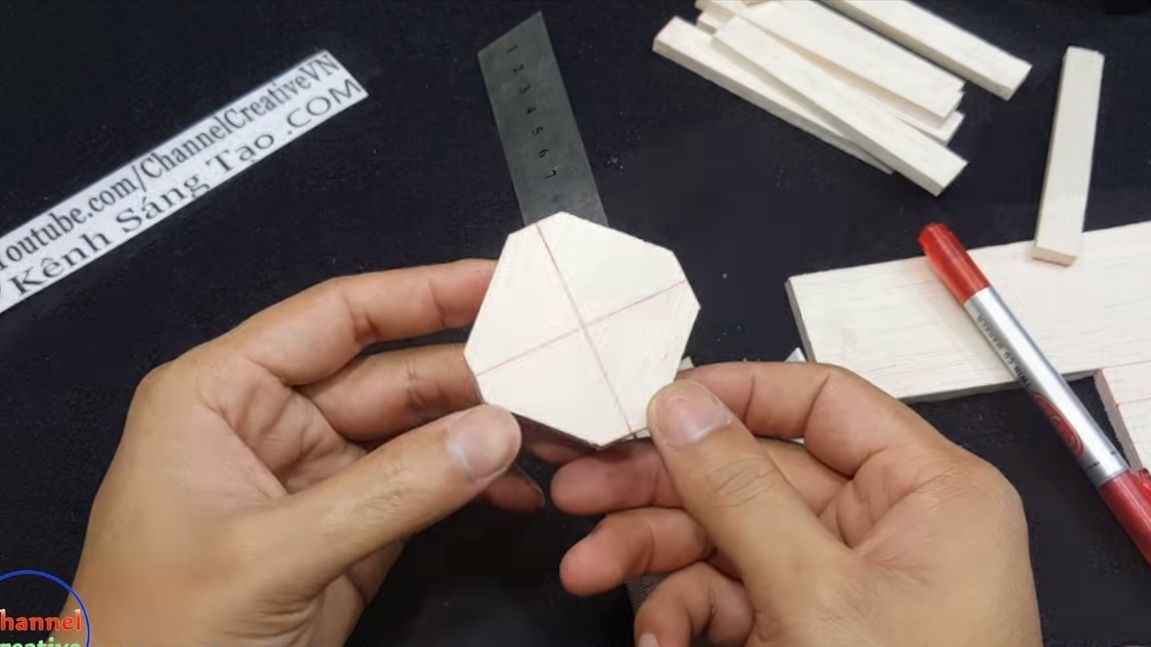
Tālāk izgrieziet laukuma stūrus tā, lai iegūtu 8 gonus. Tas ļaus centrālajā daļā piestiprināt sviras, uz kurām ir uzstādīti motori.
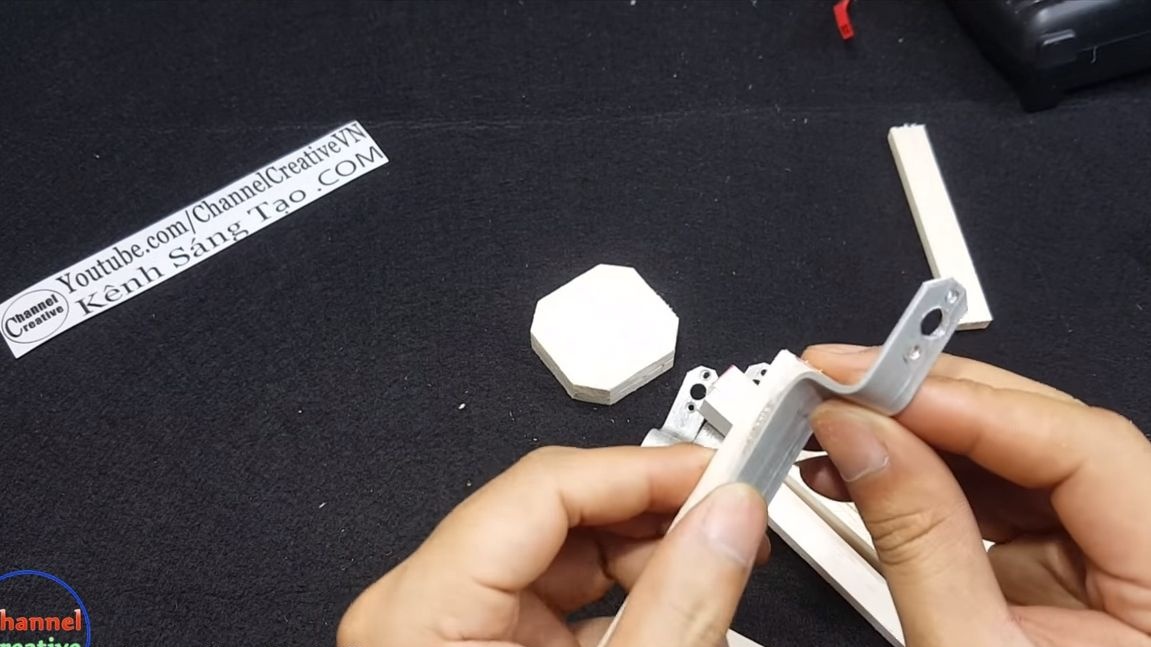
Otrais solis Dzinēja stiprinājumu izgatavošana
Dzinējiem jābūt stingri nostiprinātiem; šajos nolūkos autors nolēma izgatavot iekavas no alumīnija loksnes.Materiāla avots bija alumīnija stūris, nogrieza nepieciešamās plātnes visā garumā, metālam izmantojot zāģa zāģi. Pēc tam uz katras plāksnes jums būs jāizklāsta 3 caurumi, viens centrālais motora vārpstai un korpusa izvirzītajai daļai, bet vēl divi - stiprināšanas skrūvēm.






Pēc tam piešķiriet plāksnēm tādu formu, kādu darīja autors. Izgatavotajām iekavām jābūt precīzi vienāda garuma, pretējā gadījumā kvadrocopterā būs nelīdzsvarotība.
Trešais solis Sviru izgatavošana
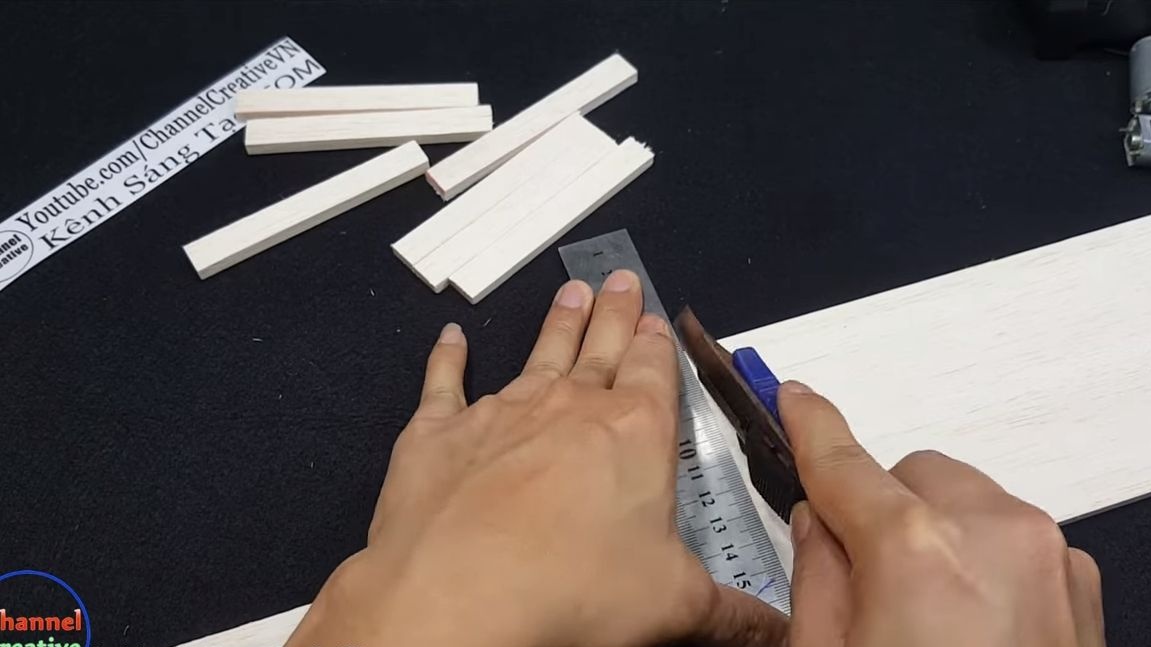
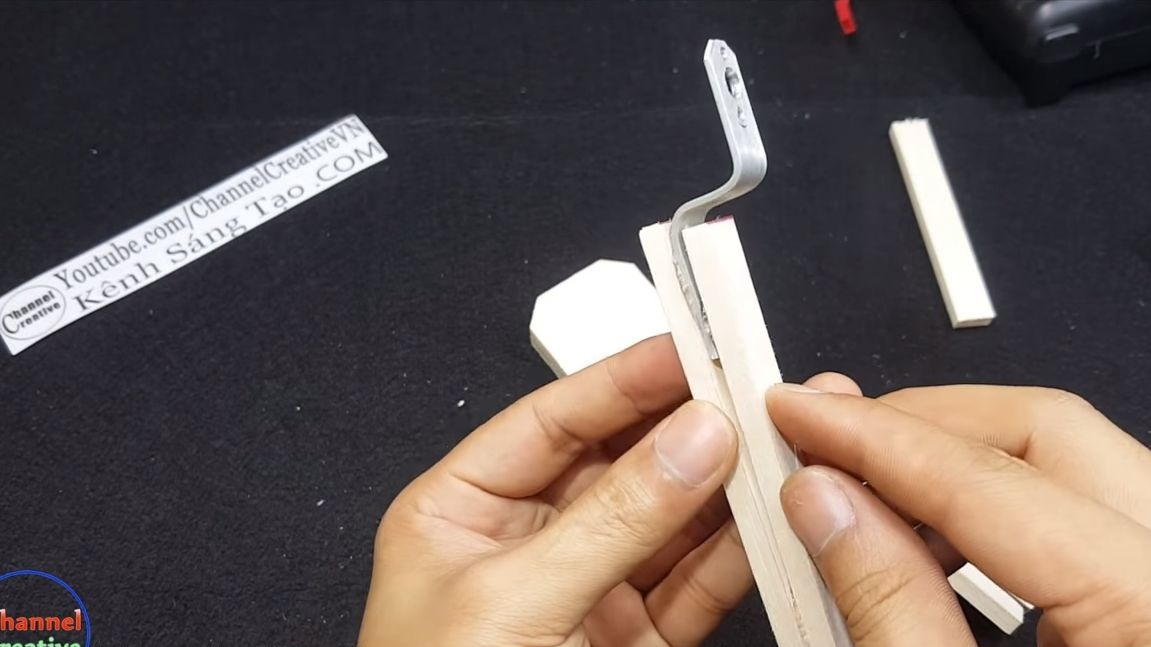
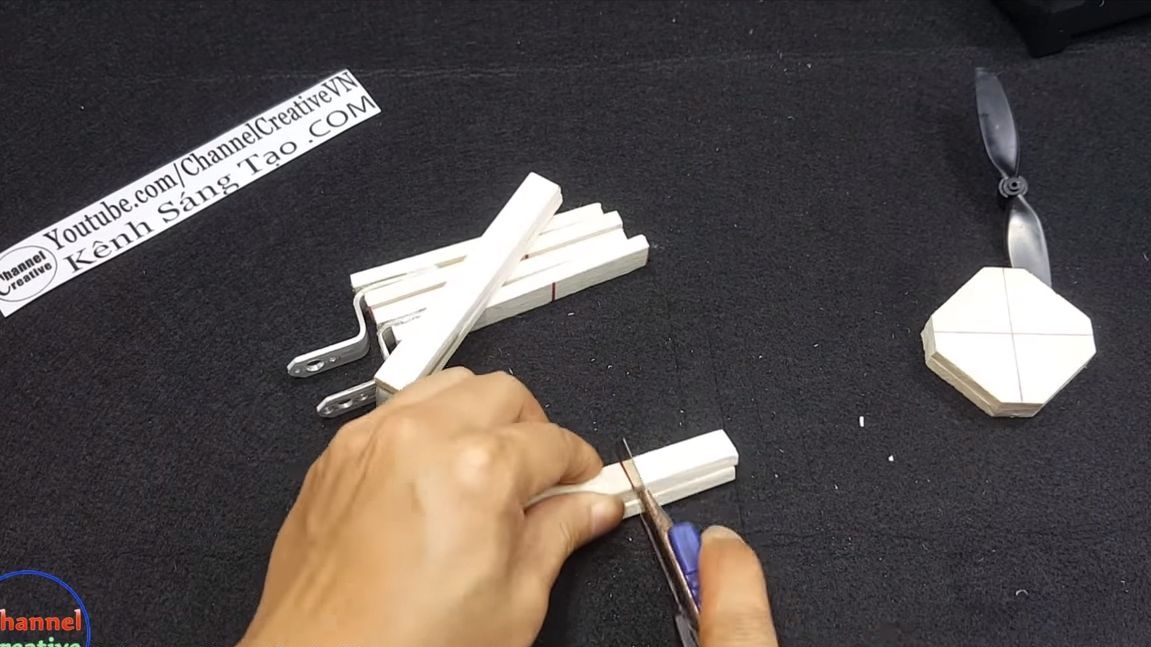
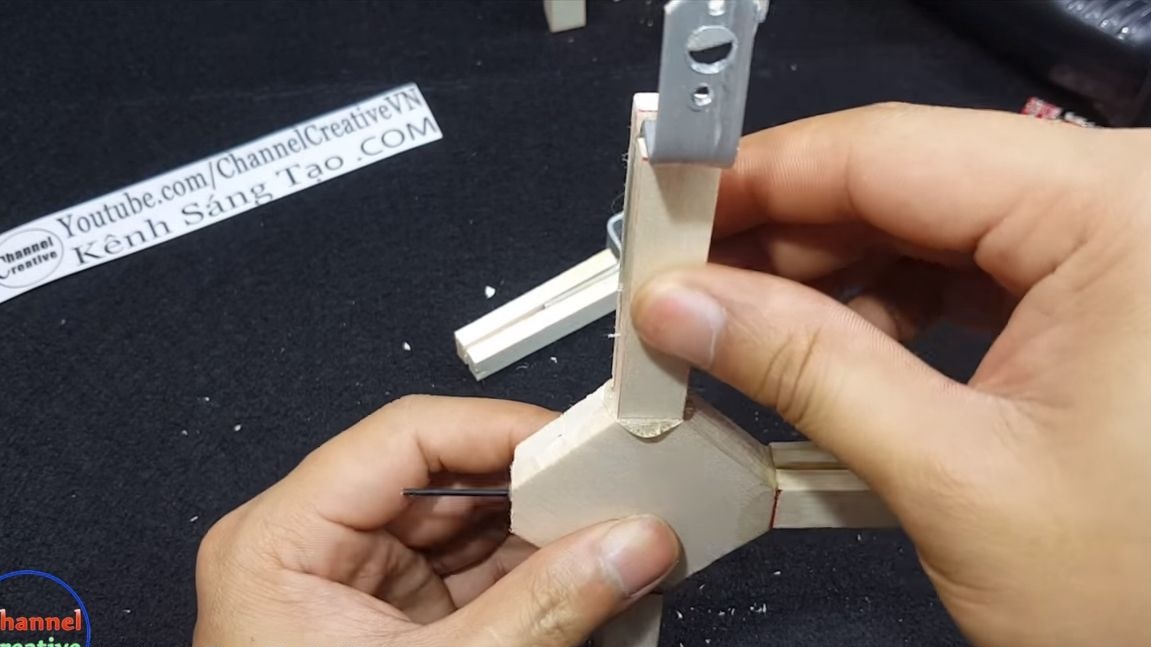
Pie centrālās daļas ir piestiprinātas 4 sviras 8-gon formā, kuru beigās ir uzstādīts motors. Mēs izgatavojam balsa sviras, katra svira ir divslāņu, tas ir, kopumā nepieciešami 8 gabali. Mēs visu atzīmējam uz balsa dēļa un izgriežam to ar biroja naža palīdzību, šo koku sagriež ļoti viegli.
Mēs ņemam karstu līmi un līmējam kronšteinu pie sviras. Bet šeit precizitāte ir ārkārtīgi svarīga, labāk ir jau iepriekš ar zīmuli iezīmēt vietu uzstādīšanai. Tad mēs atkal izmantojam karstu līmi un otro virsmu iestata. Tā rezultātā mūsu kronšteins tiek stingri iespiests starp diviem gabaliem un nostiprināts ar karstu līmi. Līdzīgi tiek ražotas atlikušās trīs rāmja daļas.
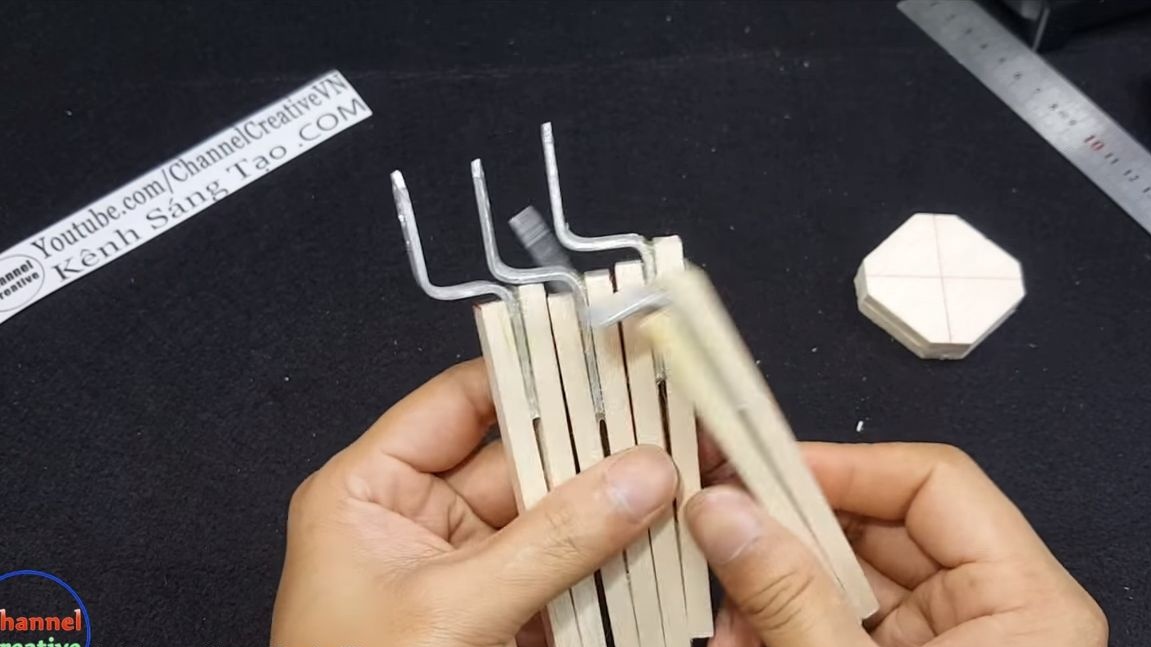
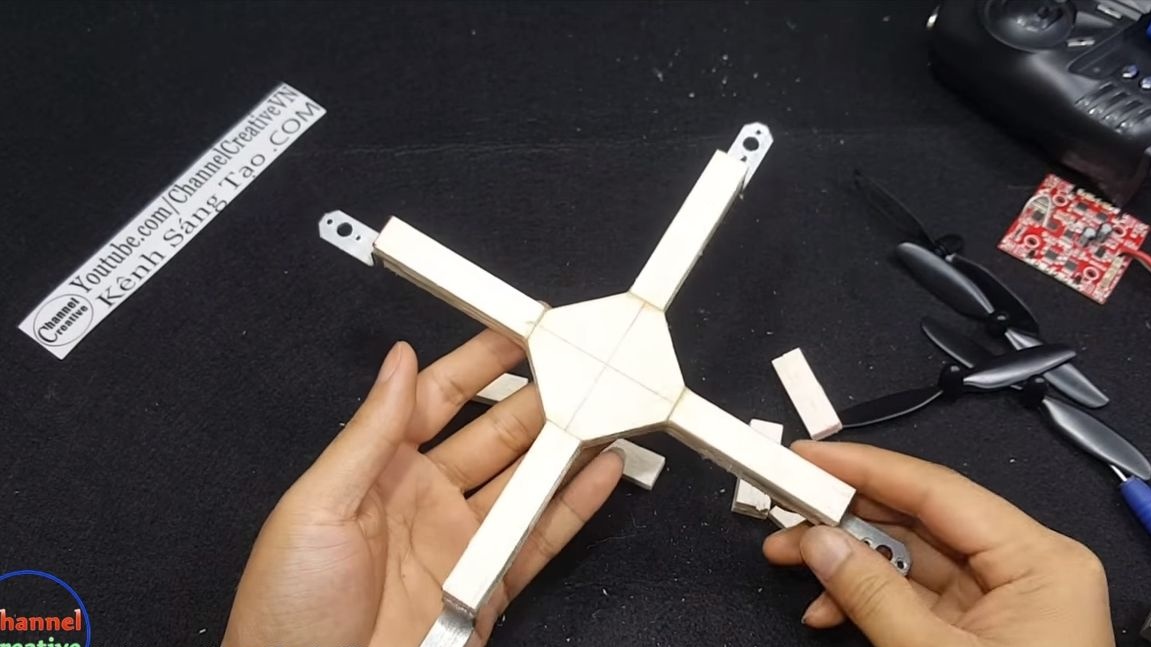
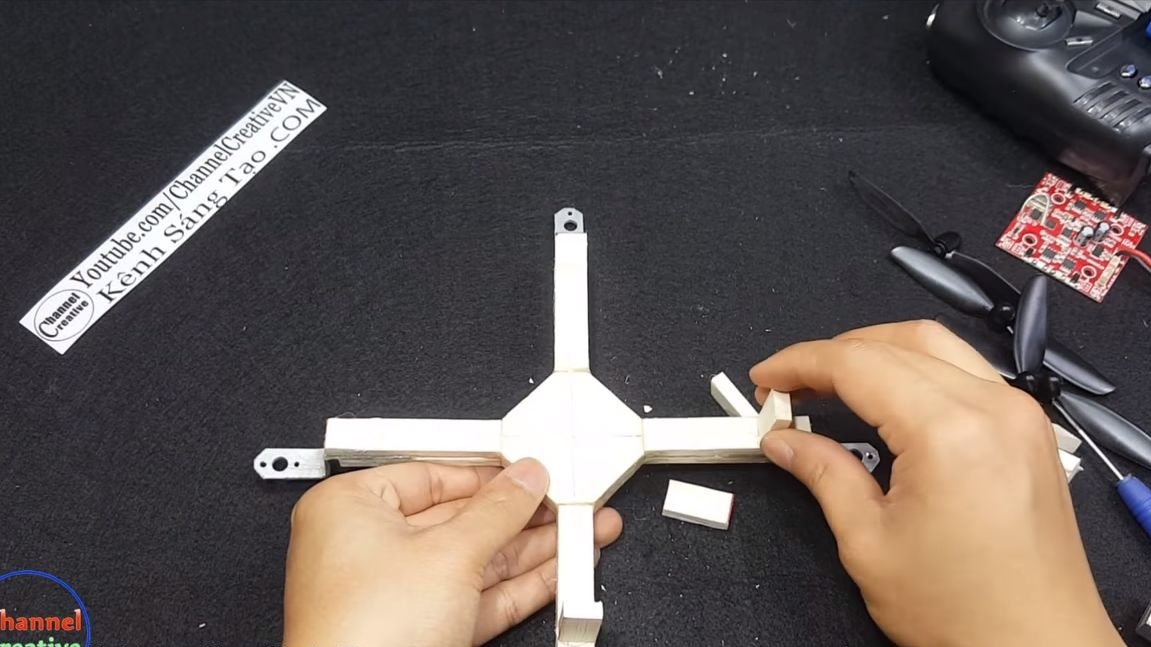
Ceturtais solis Rāmja montāža
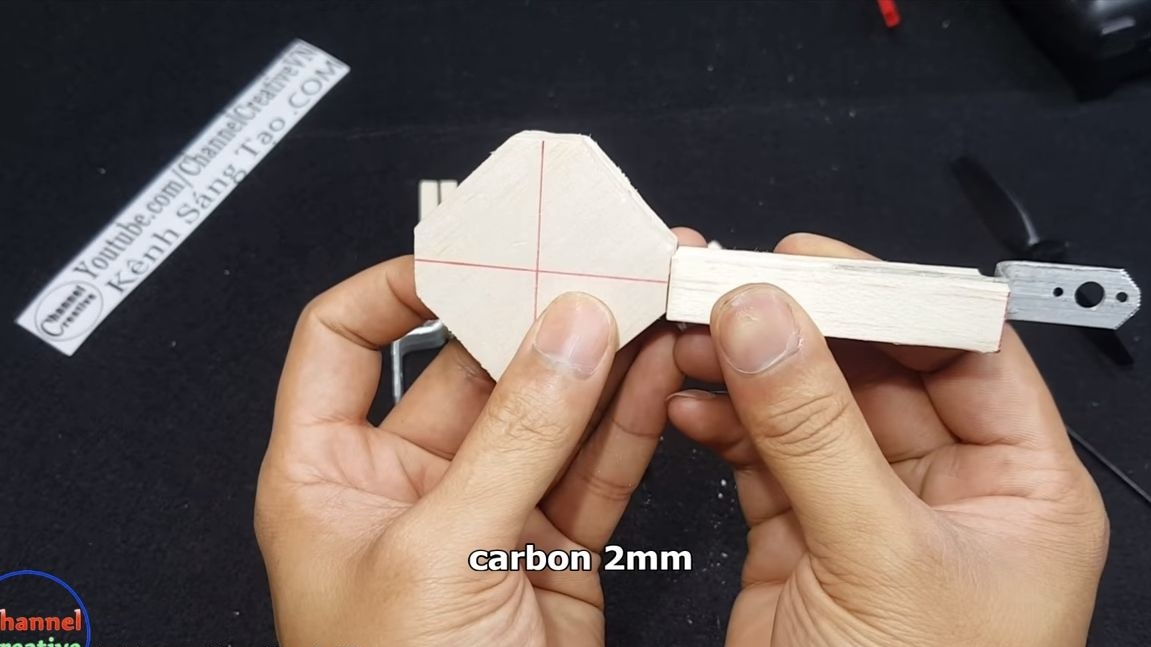
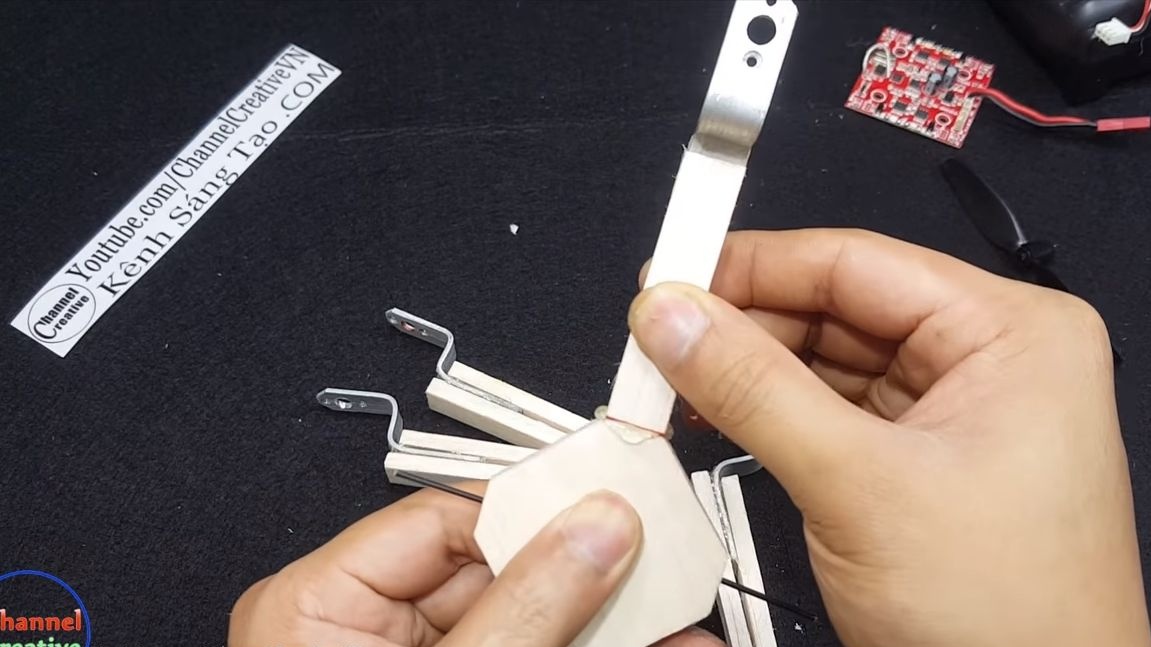
Izlīdziniet visas 4 “sviras” vienādā garumā un pēc tam urbjiet beigās caurumus. Centrālajā daļā būs jāizurbj arī caurumi, pa vienai katrai svirai. Sviras ir piestiprinātas pie centrālās daļas, izmantojot karstu līmi, un oglekļa šķiedras kodols pastiprina dizainu. Jūs varat arī izmantot ampulas no pildspalvām, zobu bakstāmiem vai kaut ko tamlīdzīgu.
Rāmja galā pielīmējiet 4 kājas pie pamatnes. Tie būs nepieciešami, lai kvadrocopters varētu nolaisties, nesabojājot rāmi. Mēs izgatavojam kājas no balsa. Varat arī būt gudrs un pielīmēt virtuves sūkli vai kaut ko tamlīdzīgu, lai kvadrocopters mīksti nolaižas.
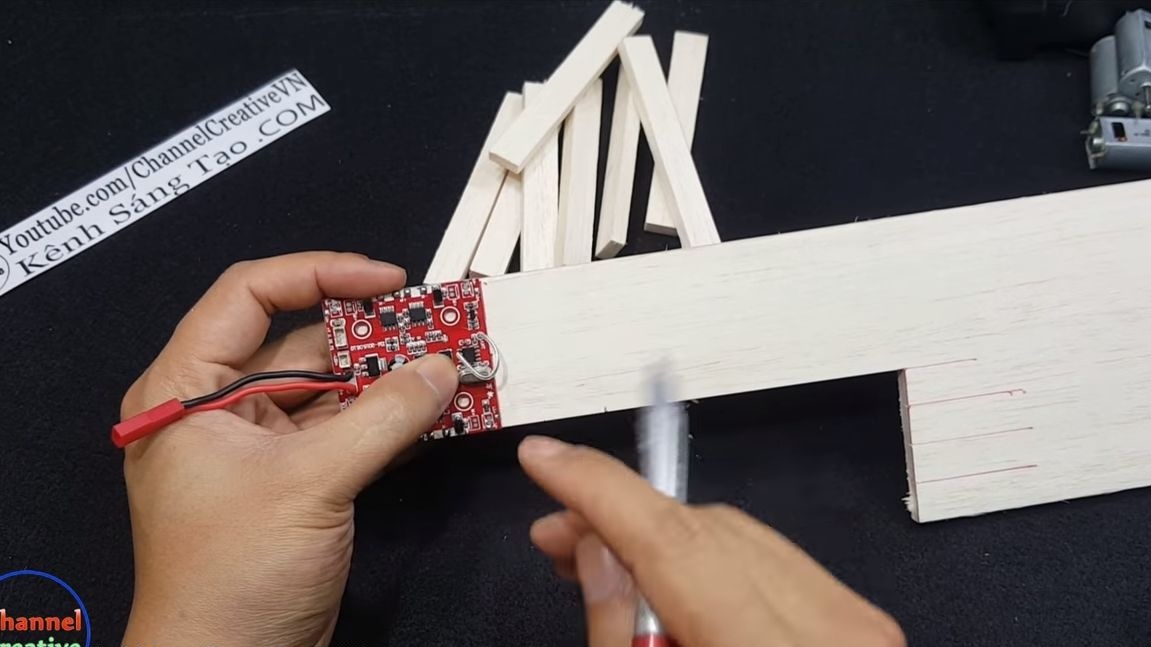
Piektais solis Instalējiet kontrolieri
Kontrolieris būs jāfiksē centrā norādītajā vietā. Autore to piestiprina, izmantojot koka skrūves. Nākotnē kontrolieris ir jāaizsargā no mitruma un putekļiem, jo ir daudz mazu sastāvdaļu, kuras var viegli sabojāt, ja nokļūst netīrumi.
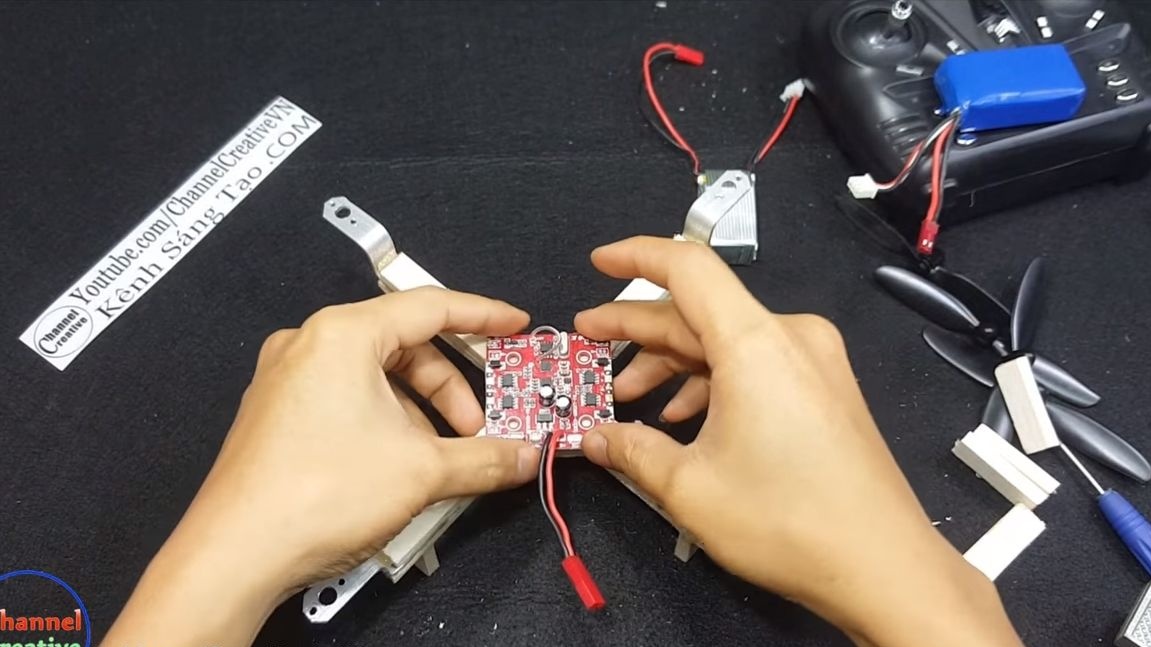
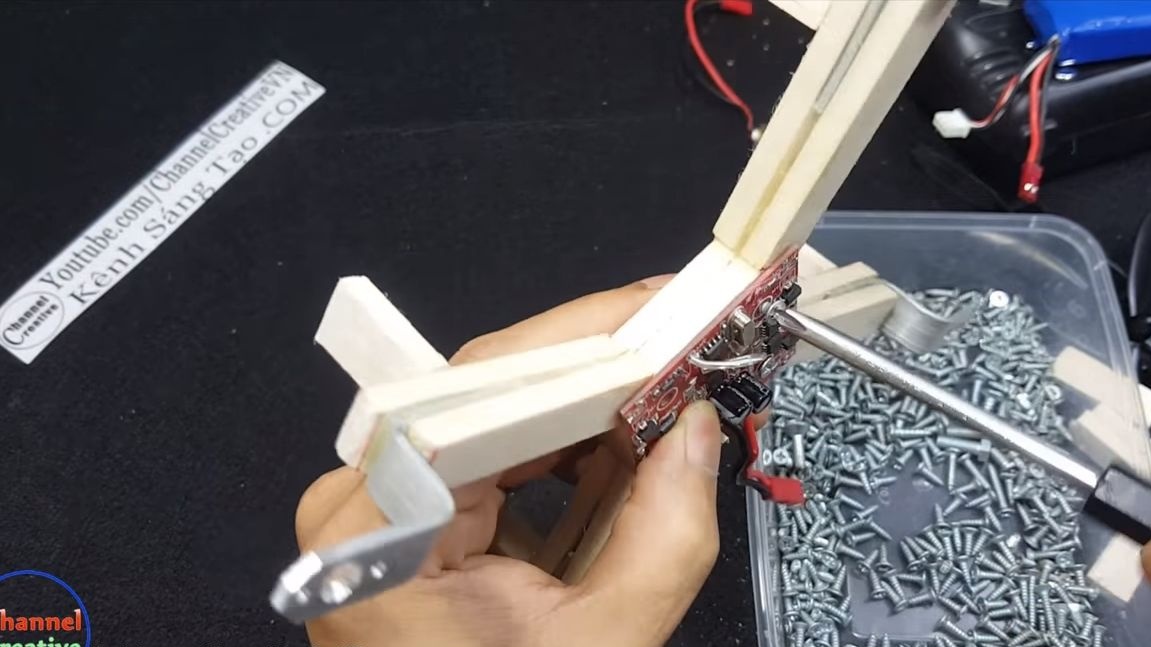
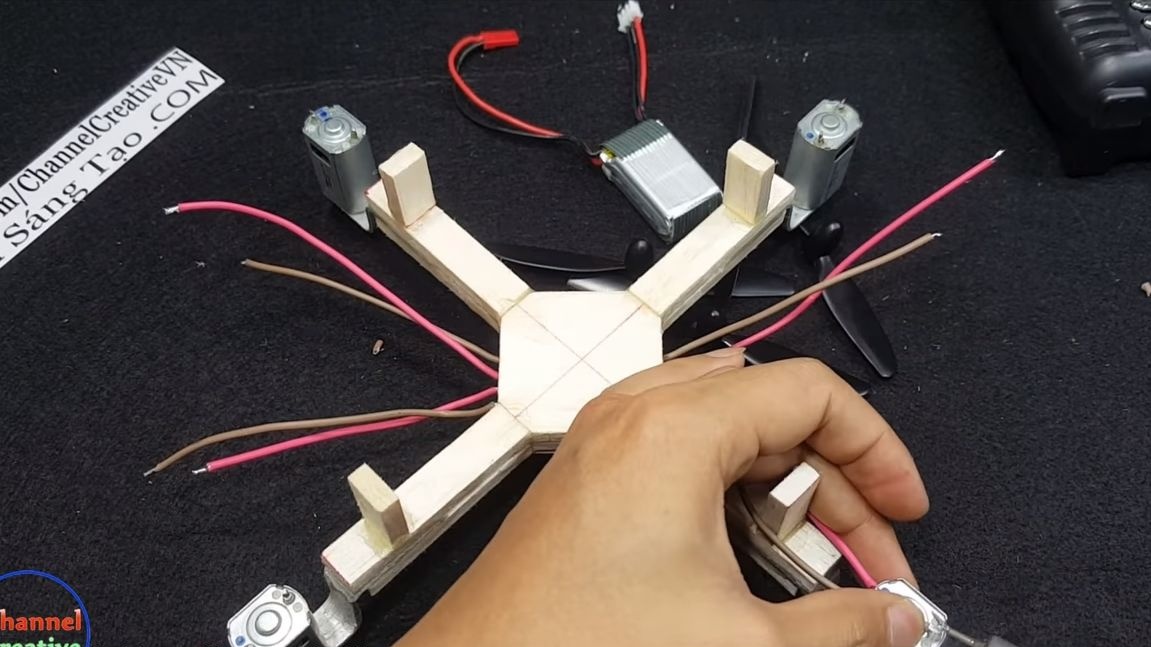
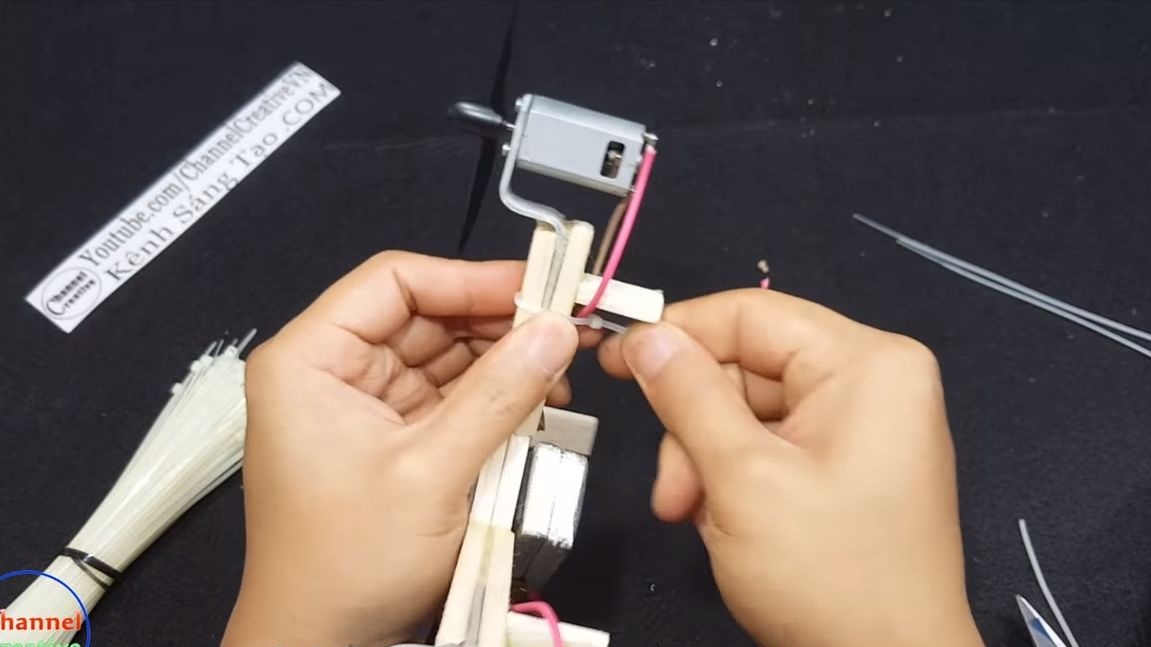
Sestais solis Mēs uzstādām un savienojam motorus
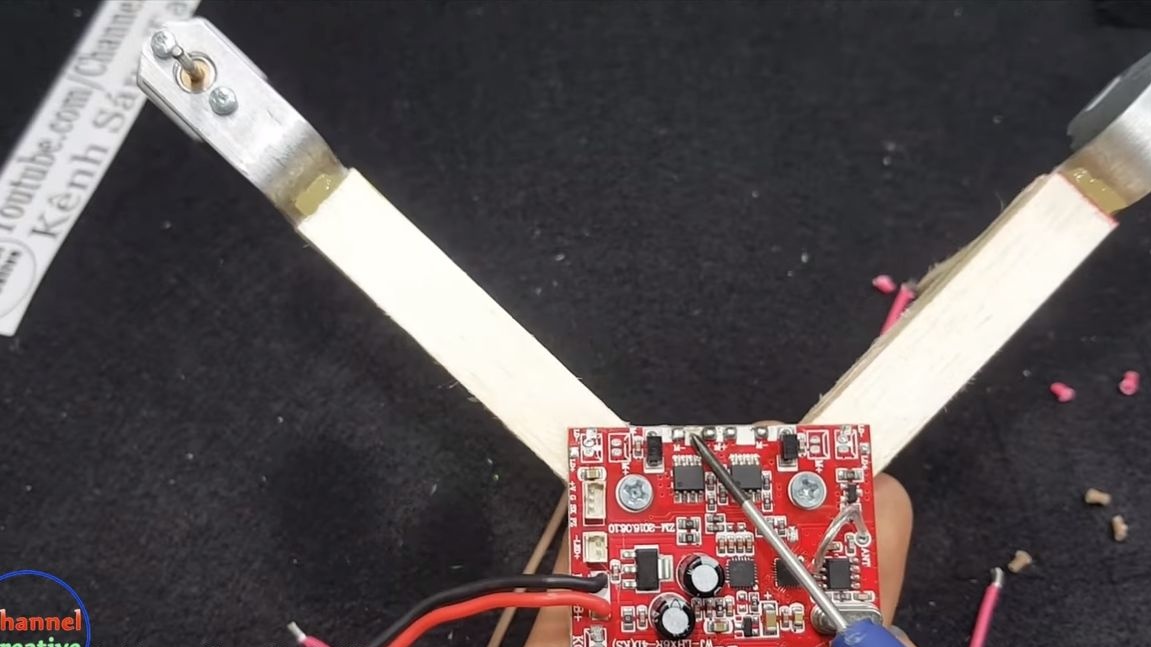
Ar skrūvēm piestipriniet motorus pie stiprinājumiem. Tagad ir pienācis vissvarīgākais brīdis - dzinēju pievienošana kontrolierim. Kopumā kontrolierim ir 8 izejas, tas ir, katram motoram ir divi kontakti atsevišķi. Lodēt vadus pie dēļa un motoriem, ievērojot polaritāti. Detalizētāk varat redzēt savienojuma shēmu fotoattēlā.
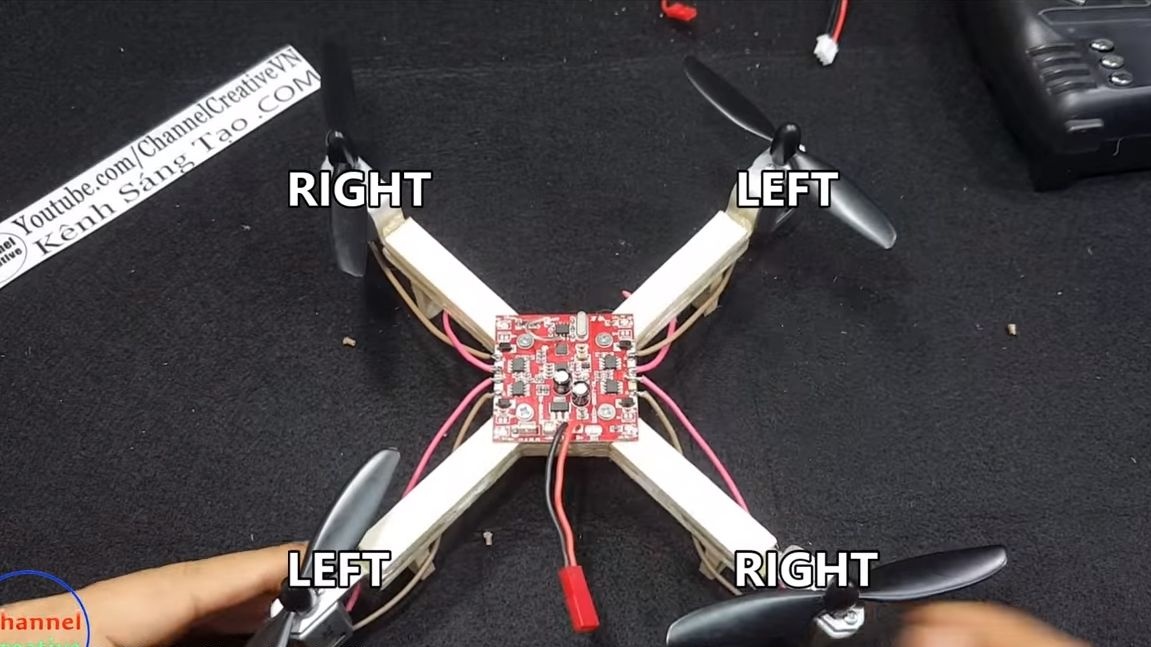
Tagad atliek uzstādīt dzenskrūves uz motora vārpstām. Mums tie ir pa labi un pa kreisi, un tie ir jāuzstāda pa diagonāli. Tas ir, labajā pusē pa labi un pa kreisi pa kreisi pa diagonāli pa rāmi. Tas ļaus izvairīties no kvadrocoptera rotācijas ap savu asi.

Septītais solis. Montāžas pēdējais posms
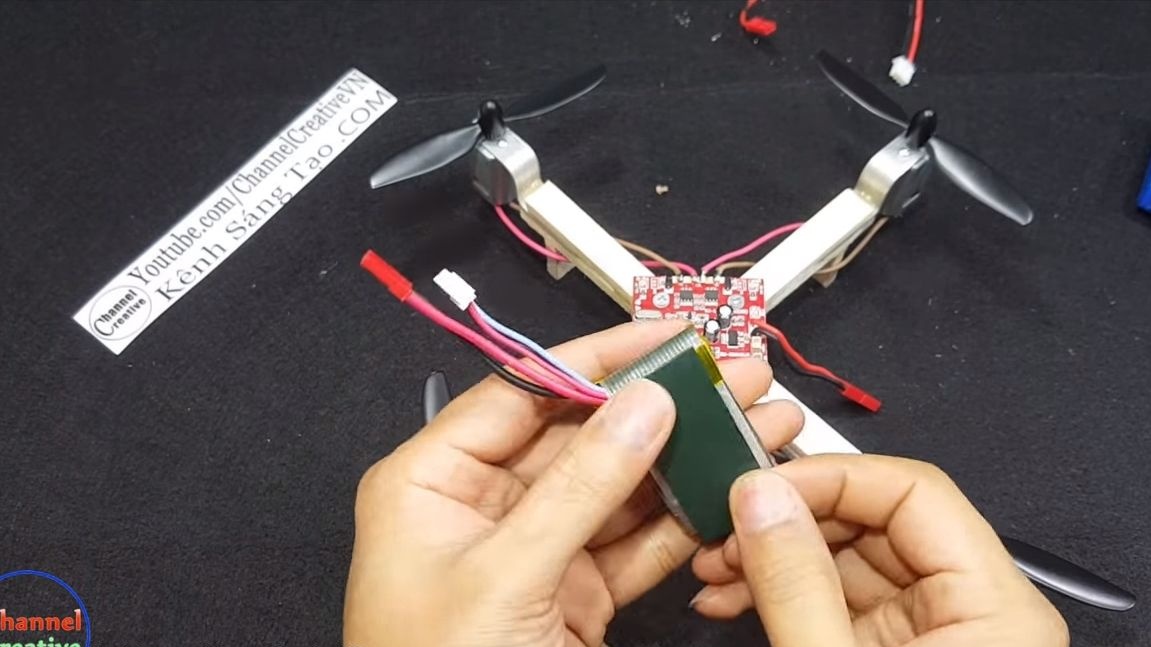
Quadrocopter ir gandrīz gatavs, apdares darbi paliek. Jums būs jāinstalē akumulators, to var būt vairāki, tas viss ir atkarīgs no ierīces jaudas un vajadzībām. Autore izmantoja divas baterijas ar darba spriegumu 7,4 volti, to ietilpība joprojām ir noslēpums. Vispirms pievienojiet baterijas viens otram, tos var ietīt ar lenti vai pielīmēt ar abpusēju līmlenti. Tālāk paņemiet abpusēju lenti un pielīmējiet akumulatoru uz kvadrocoptera pamatnes. Ar to vajadzētu pietikt, lai salabotu akumulatoru.
Jums būs vajadzīgas arī plastmasas saites. Izmantojot tos, piestipriniet vadus, kas iet uz motoriem, lai nekas nekur nekarājas. Ja vadi karājas, laika gaitā tie nokrīt no piestiprināšanas vietām.
Šajā ražošanā kvadrocopterus jau var uzskatīt par pabeigtiem. Varat turpināt testus, taču vispirms neaizmirstiet labi uzlādēt akumulatorus.Pie autora kvadrocopters diezgan ātri lido uz video, un to lieliski kontrolē. Un tas viss, neskatoties uz to, ka trūkst sarežģītas vadības elektronikas. Protams, ierīce nebija ļoti jaudīga un pietiekami viegla, tāpēc vējainā laikā to nav ieteicams pārbaudīt. Tas ir viss, veiksmi un iedvesmu pašdarinātu izstrādājumu izgatavošanā!