


Tātad, sāksim darbu. Vispirms jums jāizlemj par komponentiem un shēmām. Ķēdes darbības princips ir vienkāršs: vājš signāls no mikrofona tiek pastiprināts un nosūtīts uz Arduino analogo tapu. Kā pastiprinātāju izmantošu operatīvo pastiprinātāju (salīdzinātāju). Tas nodrošina daudz lielāku ieguvumu, salīdzinot ar parasto tranzistoru. Manā gadījumā LM358 mikroshēma kalpos kā šis salīdzinātājs, to var atrast burtiski jebkur. Un tas maksā diezgan lēti.
Ja jūs nevarējāt atrast LM358, tad tā vietā varat ievietot jebkuru citu piemērotu darbības pastiprinātāju. Piemēram, fotoattēlā parādītais salīdzinātājs stāvēja uz televizora infrasarkanā uztvērēja signāla pastiprinātāja paneļa.

Tagad apskatīsim sensora ķēdi.
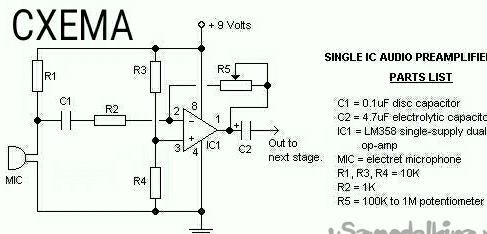
Papildus operatīvajam pastiprinātājam mums būs nepieciešami daži vieglāk pieejami komponenti.
Parastākais mikrofons. Ja mikrofona polaritāte nav norādīta, tad vienkārši apskatiet tā kontaktus. Mīnuss vienmēr iet uz lietu, un attiecīgi ķēdē tas ir savienots ar "zemi".

Tālāk mums ir nepieciešams 1 kΩ rezistors.
Trīs 10 kΩ rezistori.

Un vēl 100 kΩ rezistors ir 1 MΩ.
Manā gadījumā par “zelta vidējo” tiek izmantots 620 kOhm rezistors.
Bet ideālā gadījumā jums ir jāizmanto atbilstoša reitinga mainīgais rezistors. Turklāt, kā parādīja eksperimenti, lielāks vērtējums tikai palielina ierīces jutīgumu, bet parādās vairāk “trokšņu”.

Nākamais komponents ir 0,1 uF kondensators. Tas ir apzīmēts ar "104".

Un vēl viens kondensators pie 4,7 uF.
Tagad mēs pārejam uz montāžu. Es montēju ķēdi ar uzstādītu instalāciju.

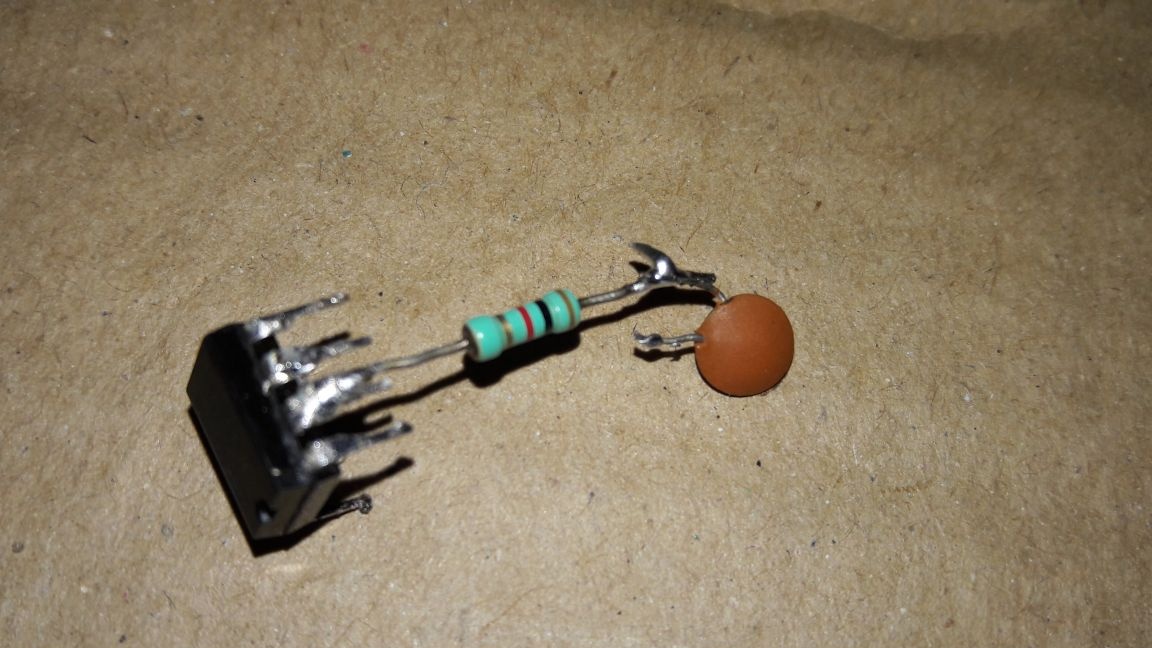
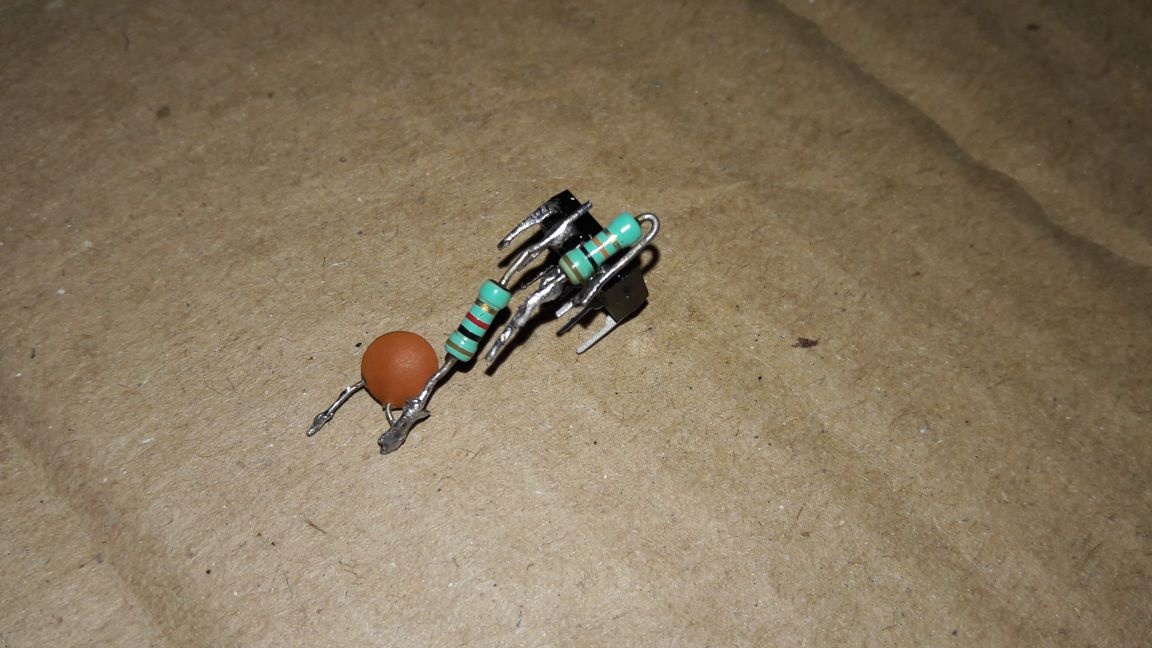







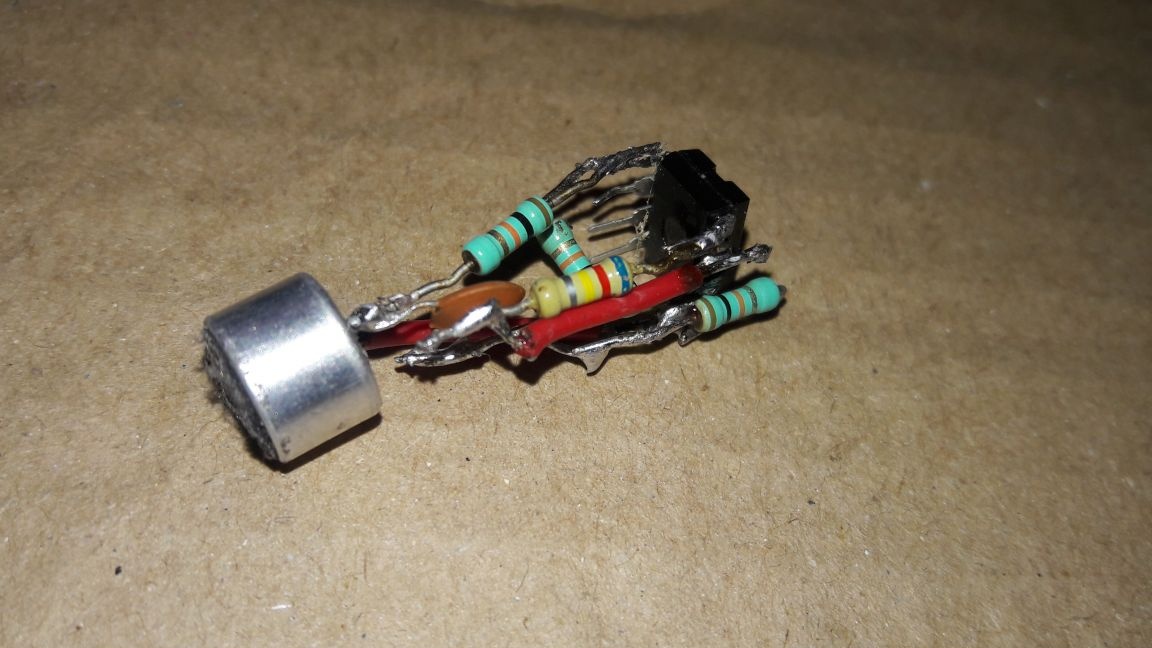

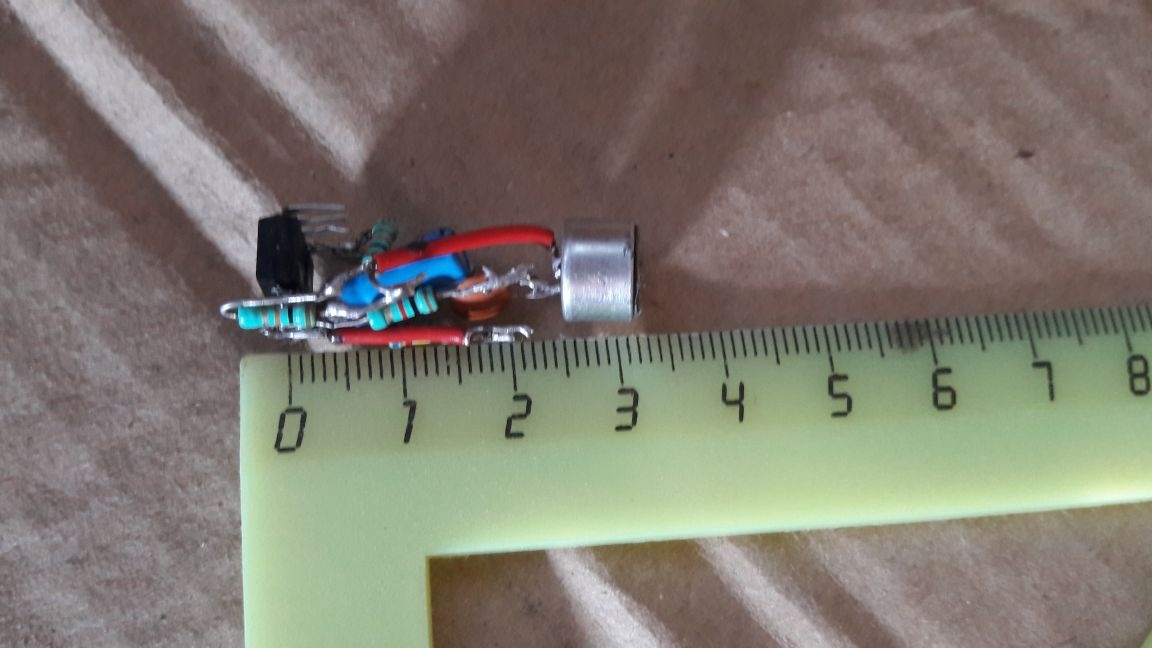
Montāža pabeigta.Es uzstādīju ķēdi gadījumā, kuru izgatavoju no neliela plastmasas caurules gabala.
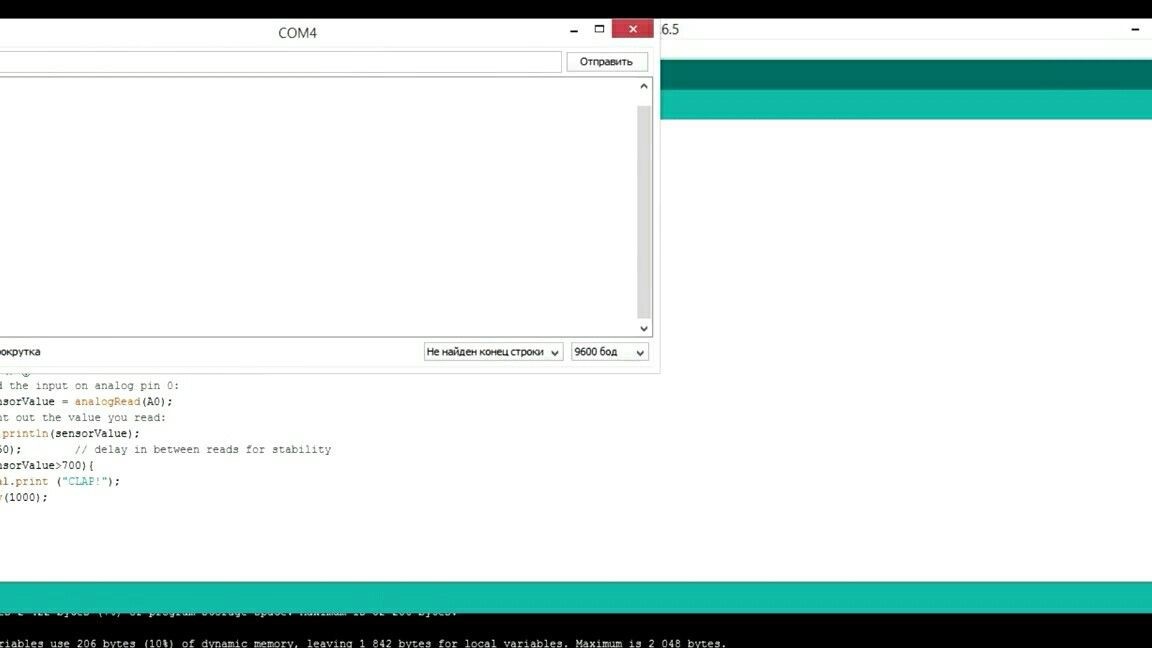
Mēs turpinām ierīces pārbaudi. Es to savienos ar dēli Arduino UNO. Mēs pārietam Arduino attīstības vidē un sadaļā Pamati atverim AnalogReadSerial piemēru.
Nederīga iestatīšana () {
Serial.begin (9600); // pievienojiet seriālo savienojumu ar ātrumu 9600 baud
}
tukšs cilpa () {
int sensorValue = analogRead (A0); / * nolasiet vērtību no nulles analogās tapas un saglabājiet to mainīgajā sensorValue * /
Serial.println (sensorValue); // izejas vērtība uz ostu
kavēšanās (1); // nogaidiet stabilizāciju vienu milisekundi
}Pirms iekraušanas dēļā, mēs mainām aizkavēšanos par 50 milisekundēm un ielādējam to. Pēc tam mēs izgatavojam testa kokvilnu un sekojam norādēm. Aplaudēšanas laikā viņi lec, mēģina aptuveni atcerēties šo vērtību un atgriežas pie skices.
Skicē pievienojiet pāris līnijas.
if (sensorValue> X) {
Serial.print ("CLAP");
kavēšanās (1000);
}“X” vietā ievietojiet to pašu vērtību, ielādējiet un atkal salieciet. Tāpēc turpiniet, līdz atrodat optimālo atbildes vērtību. Ar pārvērtētu vērtību nosacījums tiks izpildīts tikai ar kokvilnu ļoti tuvu attālumā. Ar zemāku vērtību nosacījums tiks izpildīts pie mazākā trokšņa vai pakāpienu skaņas.
Arī ar pareizu rezistora R5 izvēli šis sensors var pārvērsties digitālajā, un to var izmantot aparatūras pārtraukumos. Šī dizaina potenciāls ir milzīgs, uz tā pamata jūs varat salikt daudz dažādu projektu, un tā vienkāršība padara ierīci pieejamu visiem.
Noslēgumā es ierosinu noskatīties video, kurā viss ir skaidri parādīts. Arī daudz vienkāršāka kokvilnas slēdža kalibrēšanas process un montāža ir izskaidrots.
Es ceru, ka jums patika. Es novēlu jums veiksmīgu montāžu!