


Materiāli un instrumenti montāžai:
- rotācijas kontrolieris;
- intels Edisons ar Arduino Izlaušanās padome
- I2C PWM draiveris;
- reāllaika pulksteņa pārtraukšana;
- mini I2C OLED;
- divas servos;
- Trīs servo ar metāla pārnesumiem;
- divi vadi servo piedziņai 30 cm garumā;
- spraudņa montāžas ligzda;
- divu pozīciju pārslēgšanas slēdzis;
- suka un zobu pasta;
- strāvas padeve 5V 3A;
- plastmasas šļirce;
- uzgriežņi un skrūves;
- uzgrieznis un vītņots stienis;
- caurspīdīga akrila gabals, kura izmēri ir 61 cm x 61 cm x 3 mm;
- saplāksnis ar izmēru 91 cm x 61 cm x 6 mm;
- 3D printeris.
Robotu montāžas process:
Pirmais solis. Mehāniskā daļa
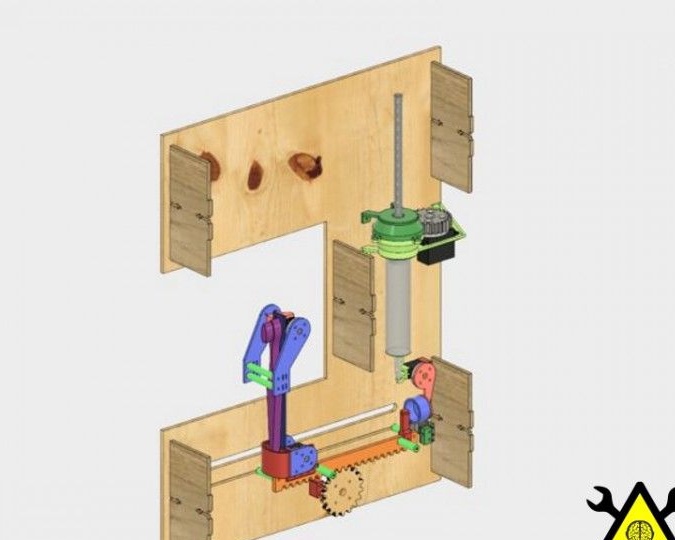
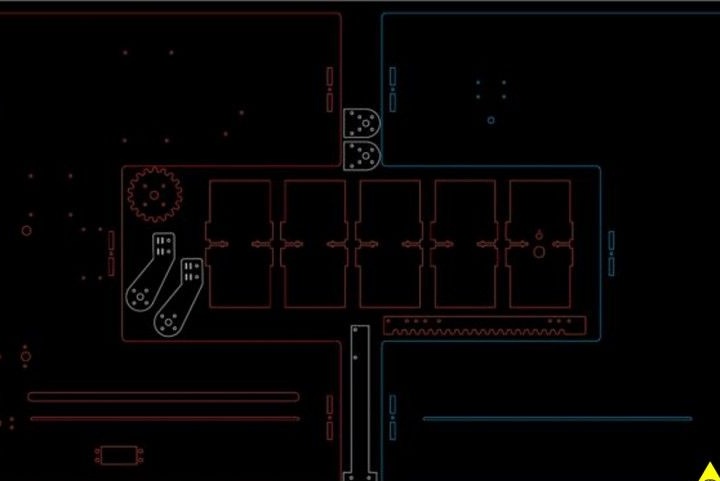
Vispirms ierīce tika modelēta, izmantojot Fusion 360 un Illustrator kombināciju. Procesa laikā tika izveidota visa tehnoloģija, kas ietver 3D drukāšanu, kā arī metāla griešanu ar lāzeru. Kopumā sistēmu var iedalīt četros galvenajos mezglos. Tas ietver ratiņus, zobu sukas turētāju, galveno korpusu un dozatoru.
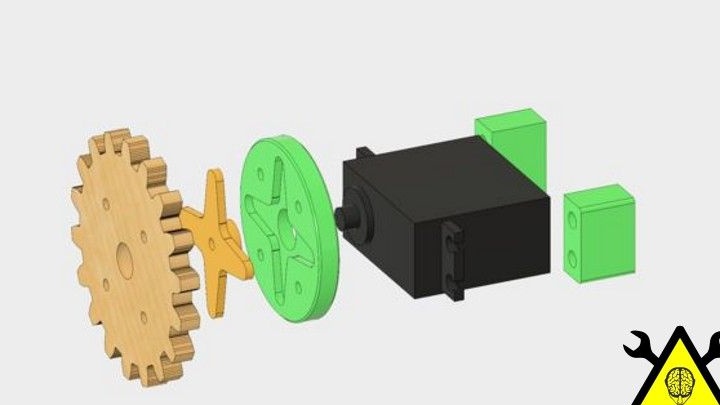
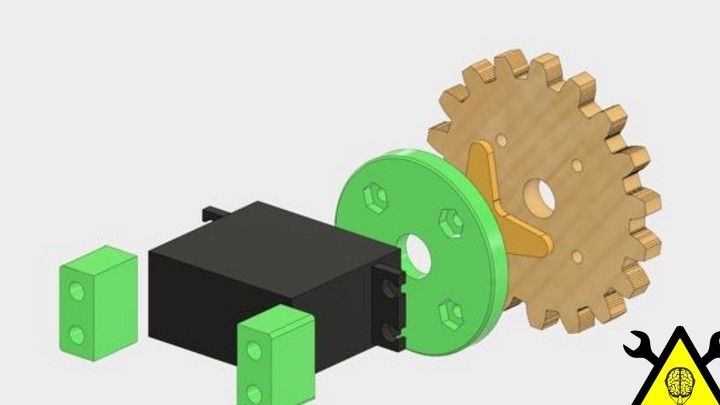
Lai mājās gatavotus izstrādājumus varētu izmantot plašākām vajadzībām, tika nolemts modelēt adapterus standarta un mikroservoziem. Šiem adapteriem ir spraugas standarta vārpstu piestiprināšanai, kā arī vieta četriem uzgriežņiem aizmugurē. Sakarā ar to, ka adapteri tika izstrādāti šahtām, tie jāpiestiprina vai nu pie plāksnēm, vai citiem priekšmetiem.

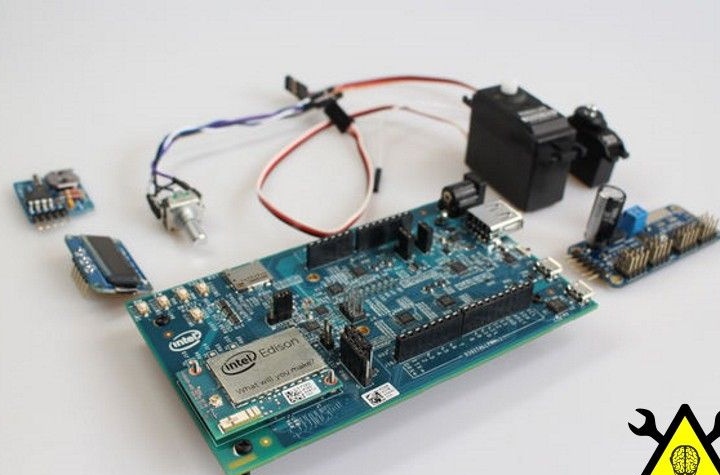
Otrais solis Ierīces elektriskā ķēde
Kā strāvas avots tiek izmantots 5 V un 3A avots. Tas ir pietiekami, lai darbinātu vienu motoru. Runājot par galveno dēli, tas patērē apmēram 500 mA, un motora piedziņa, oriģinālais LED un reālā laika pulkstenis patērē nelielu daudzumu strāvas.
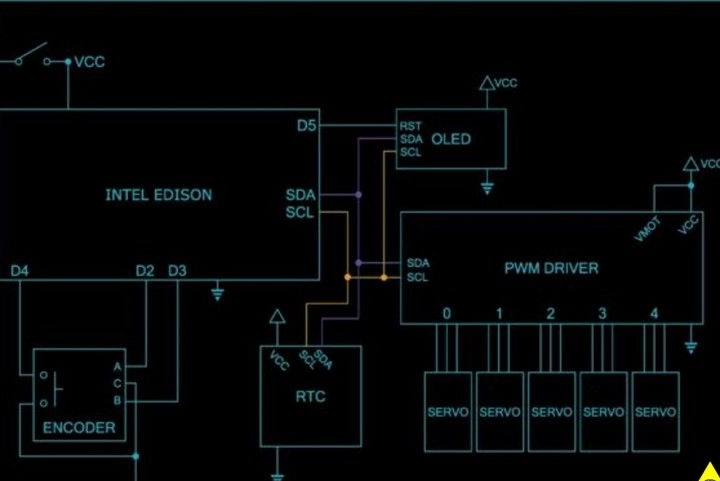
Kā galvenais sistēmas kontrolieris tiek izmantots Intel Edison procesors. Sakarā ar dēļu atdalīšanos procesors var viegli sazināties ar citiem elektronikas komponentiem. Dēlis tiek savienots ar motoru, pulksteni un ekrānu.
Lai kontrolētu piecas servos, tiek izmantota PWM plate. Dzinēju jaudu var kontrolēt, izmantojot ārēju avotu, taču autors nolēma piesiet Vmot ar VCC tapu.Pateicoties tam, visu sistēmu darbina 5 V.
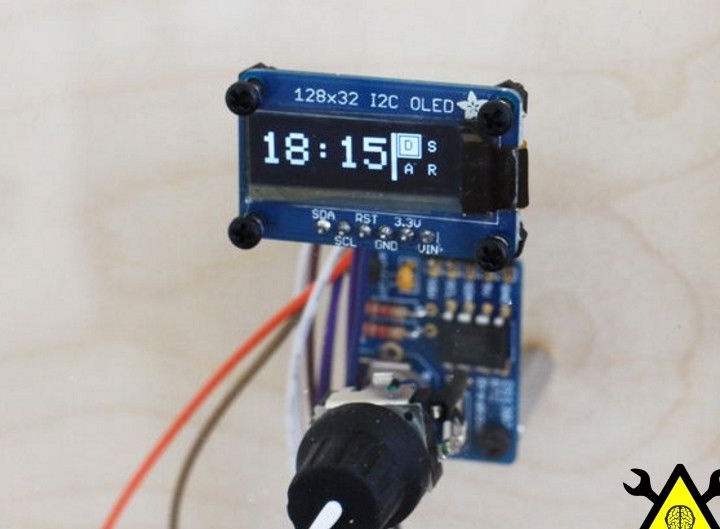
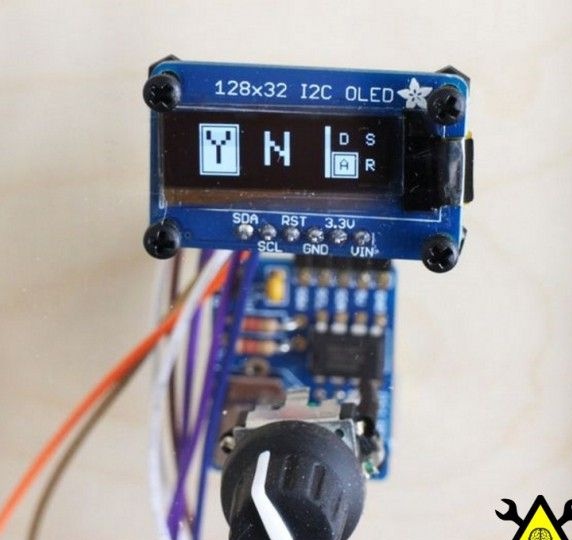
Lai ierīci varētu vadīt, tiek izmantots neliels displejs 128 x 32. Rotācijas sensors darbojas kā galvenā lietotāja ieeja. Sensora izejas ir savienotas ar procesora digitālajiem kontaktiem.
Trešais solis Virsbūves montāža
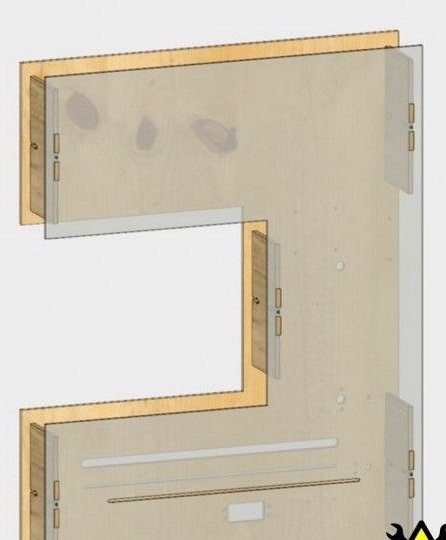
Aizmugurējā daļa darbojas kā korpusa balsts, tā ir izgatavota no 6 mm biezas saplākšņa. PWM un procesora nostiprināšanai tiek izmantotas četras skrūves. Edisons ir uzstādīts priekšpusē, bet PWM - aizmugurē.
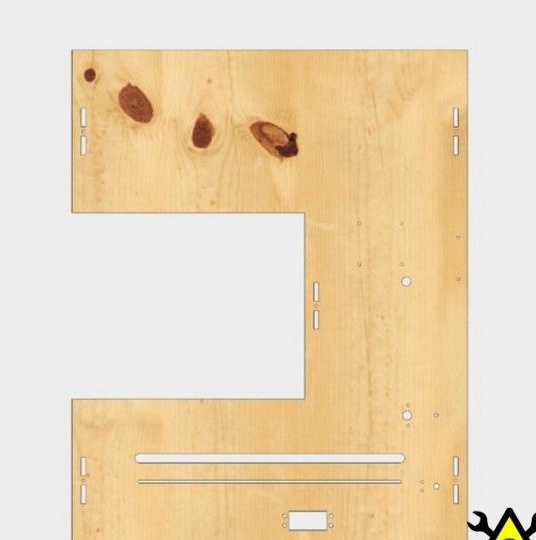
Priekšējā un aizmugurējā paneļa savienošanai tiek izmantotas piecas starplikas. Starplikas ir piestiprinātas pie plāksnēm ar skrūvēm un atbilstošiem uzgriežņiem. Plāksnes ir gandrīz simetriskas, bet izvirzījumi vienā malā ir īsāki, tie nepagarinās uz priekšu. Slēdzis kopā ar strāvas savienotāju ir piestiprināts pie apakšējā statņa.

Kas attiecas uz priekšējo paneli, tas galvenokārt ir nepieciešams, lai aizsargātu ierīci darbības laikā. Ekrāna nostiprināšanai tiek izmantotas četras skrūves, rotācijas sensors ir piestiprināts arī ar uzgriežņiem.
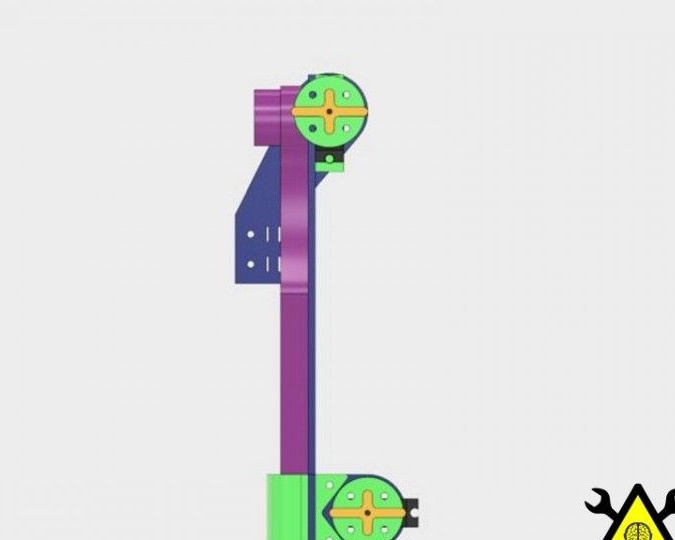
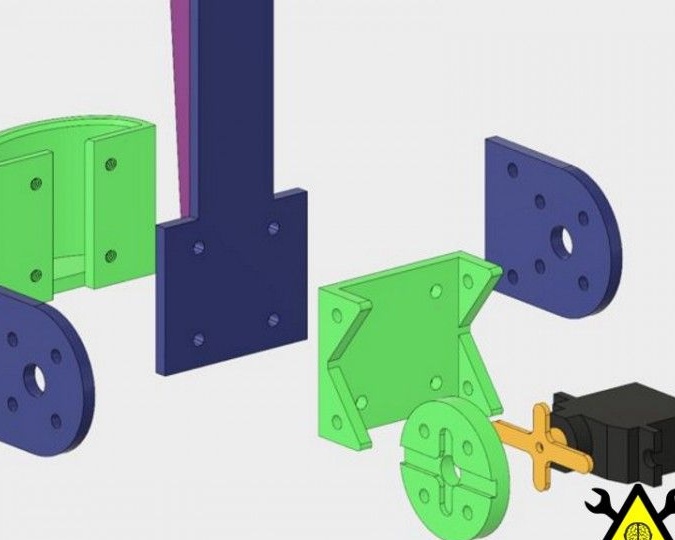
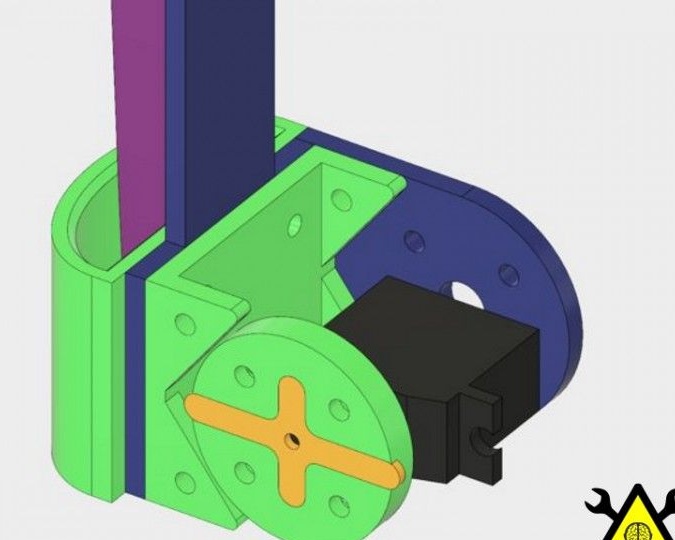
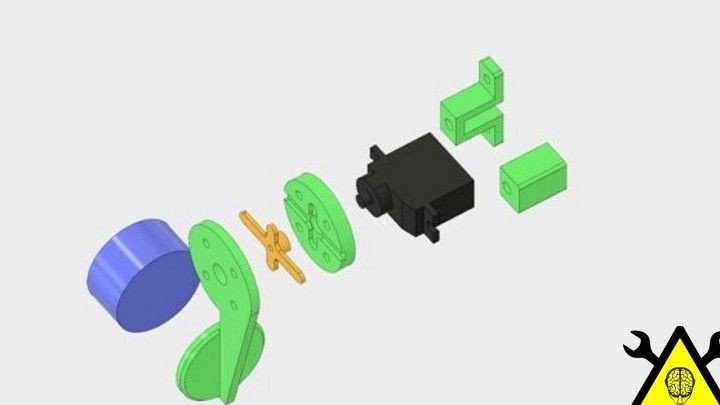
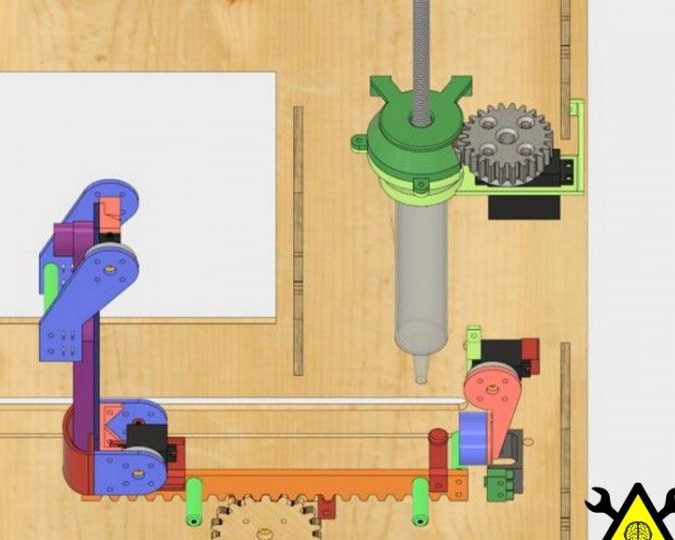
Ceturtais solis Zobu birstes stiprinājums
Uz zobu sukas turētāja ir divas servos, kuras darbina komponenti - pamatne un “galva”. Attēlā var redzēt zilās un zaļās krāsas elementus. Tas, kas tika sagriezts ar lāzera griezēju, ir zilā krāsā, un elementi, kas ir uzdrukāti uz 3D printera, ir zaļā krāsā.

Pateicoties galvai, zobu suka nenokrīt. Rokas vada viena servo piedziņa, tās ir piestiprinātas ar divām blīvēm. Lai piestiprinātu servomotoru galvenajai plāksnei, tiek izmantots 3D adapteris un divas skrūves. Plāksnē ir četras spraugas, caur kurām ar melnu gumijas joslu palīdzību ir piestiprināta zobu suka.
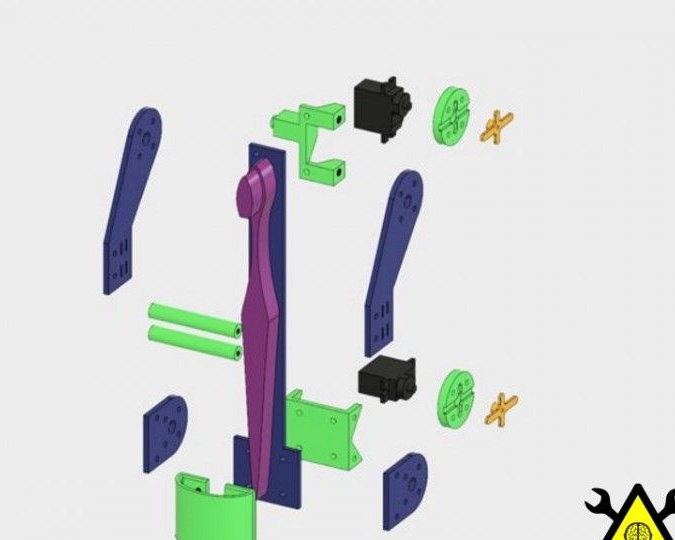
Pamats ir mazs 3D kauss, tas novērš suku no krišanas. Pēc tam, kad zobu suka ir ielādēta montāžā, servo piedziņa to notur un pagriežas. Plākšņu savienošanai tiek izmantotas astoņas skrūves.


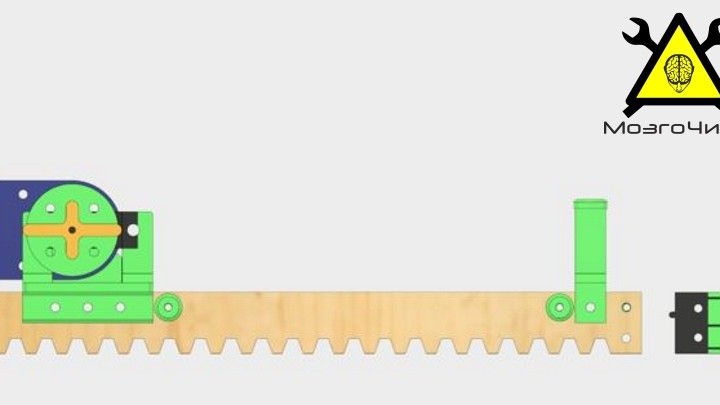
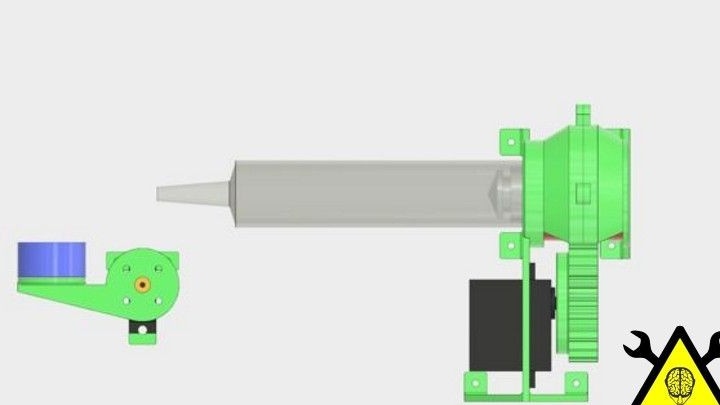
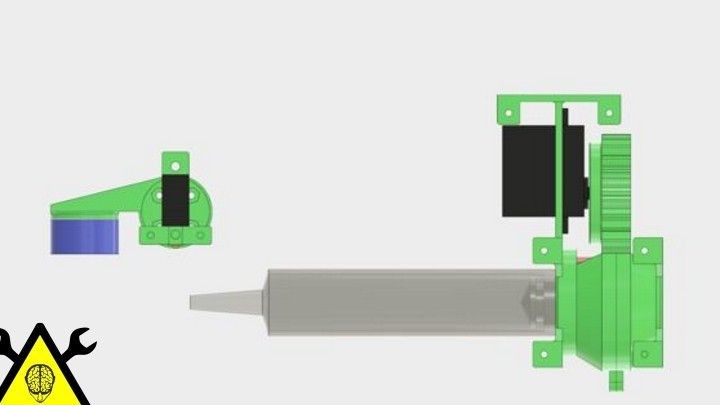
Piektais solis Sliedes montāža
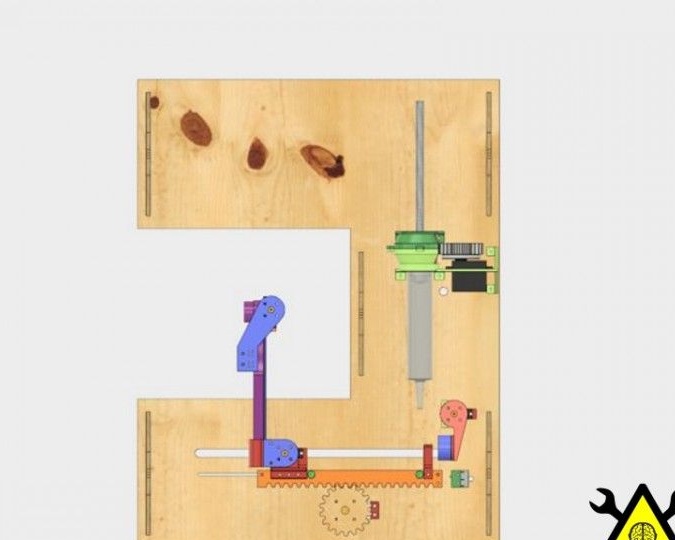
Rāmis sastāv no trim unikālām daļām, tas ir galvas balsts, kariete un statņi. Izmantojot karieti, tiek piestiprināts rāmja turētājs. Pats ratiņi ir piestiprināti ar trim skrūvēm. Galvas balsts ir nepieciešams, lai samazinātu galvenā servo turētāja slodzi, tas tiek uzstādīts tālāk uz karkasa uz rāmja.
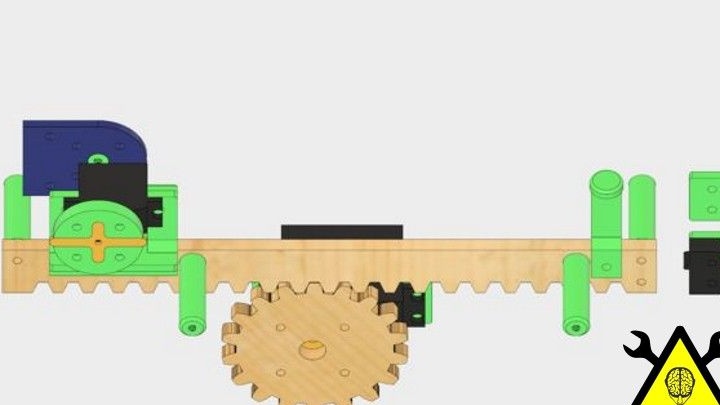
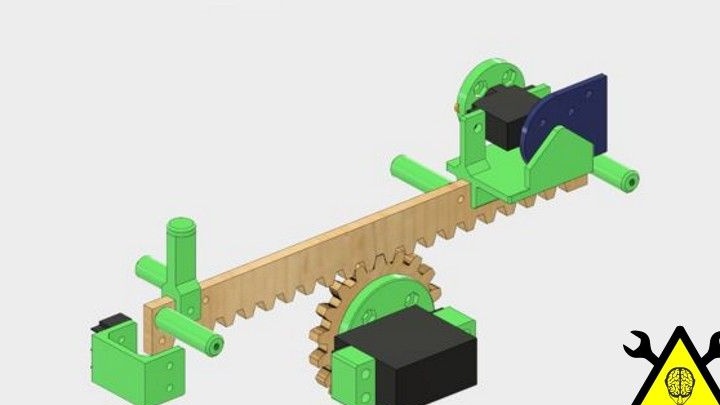
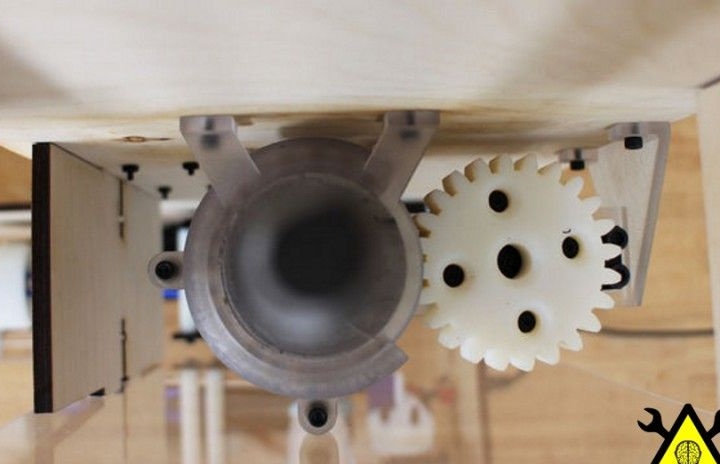
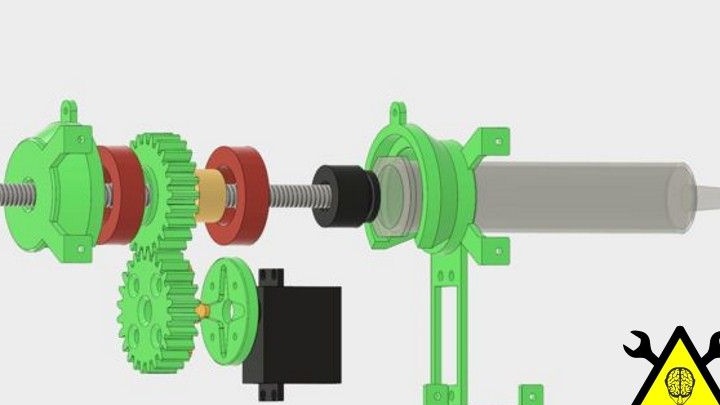
Pārnesums ir uzstādīts zem rāmja. Tas ir izgriezts no 6 mm biezas saplākšņa un piestiprināts pie standarta servovārpstas. Pati servo piedziņa ir novietota nedaudz no pamatnes plāksnes, saistībā ar to uz tās ir identiski taisnstūrveida statņi. Pats servo ir piestiprināts pie pamatnes ar četrām skrūvēm.
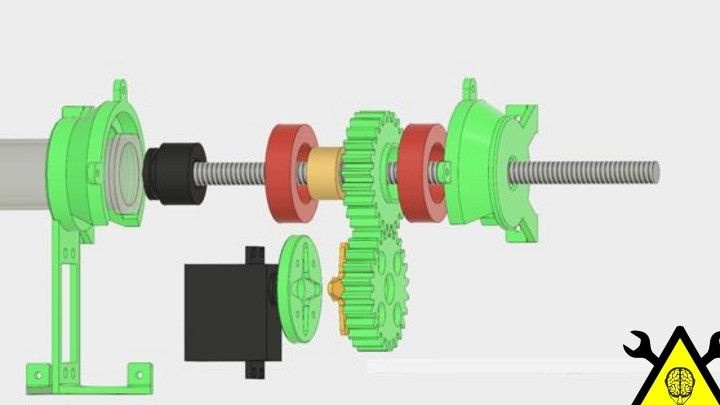
Sestais solis Dozētāja uzstādīšana
Sarežģītākais ierīces mehānisms ir lineārā piedziņa. Pateicoties viņam, pastas deva notiek. Ierīces kodols ir vītņots stienis un uzgrieznis, ar tā palīdzību caurule tiek saspiesta. Piedziņas nostiprināšanai tiek izmantotas sešas skrūves.
Septītais solis. Programmatūra
Kopumā programmai ir trīs funkcijas: laika iestatīšana, "trauksmes" iestatīšana, kā arī ierīces palaišanas funkcija.
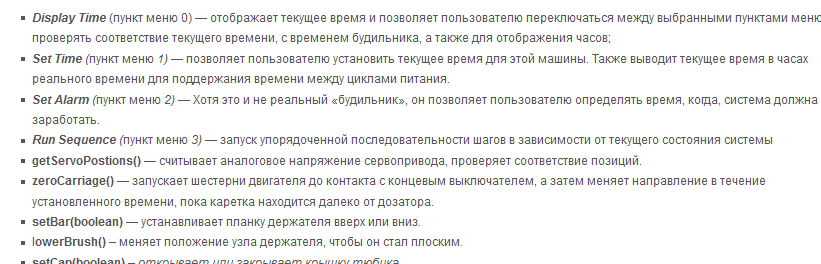
Tas viss, pēc mirgošanas un konfigurēšanas ierīce ir gatava lietošanai.