

Autore šo projektu pamatoja ar vienkāršāku versiju. mājās gatavots laivas un to pilnveidoja. Sensori tiek novietoti laivā, lai izvairītos no šķēršļiem un nonāktu gaismā. Kā tiek izmantots kontrolieris laivā Arduino, priekšā ir uzstādīts ultraskaņas sensors, un sānos atrodas gaismas sensori. Šī vienkāršā laiva neiekļūst sienās, un to kontrolē lukturītis.
Materiāli un instrumenti:
- Izolācijas lente / līmlente
- Termolīme ar karstu līmi
- līdzstrāvas motori 2 gab
- plastmasas pudeles 2 gab
- vadi
- mazie dzenskrūves 2 gab
- Arduino, dators un USB kabelis
- plastmasas kaste
- 9 V akumulators un savienotājs
- strāvas diodes (tips 1N4004)
- Rezistori
- tranzistors MOSFET vai TIP 120
- divi fotoelementi un divas pogas
- šķēres
- Lodēšana ar lodāmuru

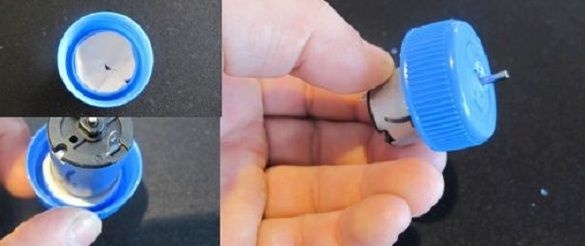
1. solis. Dzinēju uzstādīšana.
No pudelēm tiek noņemti vāki, un katrā no tām tiek izveidots caurums. Vāka iekšpusē autors izspiež karstu līmi, neaizverot caurumus. Viņš ievietoja motora vārpstu caurumā un uzlika to uz līmes. Pēc līmes izžūšanas vārpsta brīvi griežas. Tāda pati procedūra notiek ar otro pārsegu.
2. solis. Pudeļu piestiprināšana.
Pudeles tika savienotas kopā ar spāres principu, izmantojot trīs līmlentes sloksnes.

3. solis. Lodēšana motoriem.
Tā kā spraudņos uzstādītajiem motoriem nebija vadu, bija nepieciešams tos lodēt, vadu garums bija apmēram 25-30 cm.

4. solis. Izgrieziet pudelēs.
Lai vadi iekristu laivas korpusā, no to augšējās malas tiek izveidots neliels slots.

5. solis. Motoru nostiprināšana.
Tālāk autore vērpj pudeļu vākus, jo tie nav savīti labi; man nācās izmantot karstu līmi. Caur sagatavotajiem caurumiem pudelēs tiek izstumti vadi.

6. solis.
Plastmasas kārba pielīp pie divām pudelēm. Šajā elektronikas kapacitātē varat izveidot caurumus vadiem vai turēt vadus caur kastes aizmuguri. Caurumi pudeļu vadiem ir izolēti ar karstās kausēšanas līmi.

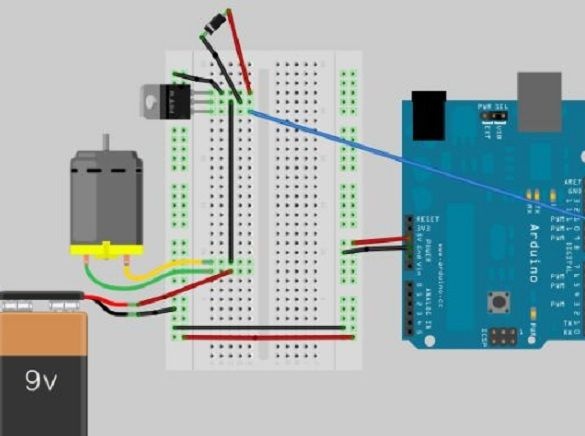
7. solis. Elektroinstalācijas shēma.
Ķēdē kā slēdzis tiek izmantots TIP 120 tranzistors (varat izmantot līdzīgus MOSFET vai Darlington tranzistorus). To izmanto, lai pārslēgtu slodzi, patērējot lielu daudzumu strāvas, jo Arduino nav pietiekami daudz enerģijas motoriem. Šī ķēde ir samontēta pirmajam un pēc tam otrajam motoram (otrajam motoram nav nepieciešama cita baterija).
8. solis. Sensori.
Ultraskaņas sensors ir lieliski piemērots laivas priekšpusei, brīdina par šķēršļiem ceļā. Fotoelementi darbojas kā antenas un tiek izmantoti, lai laiva peldētu gaismā.Pogas sānos tiek izmantotas kā šķērsļu sensori. Varat arī modificēt kodu un izmantot citus sensorus, piemēram, infrasarkano.

9. solis. Sensoru shēmas.
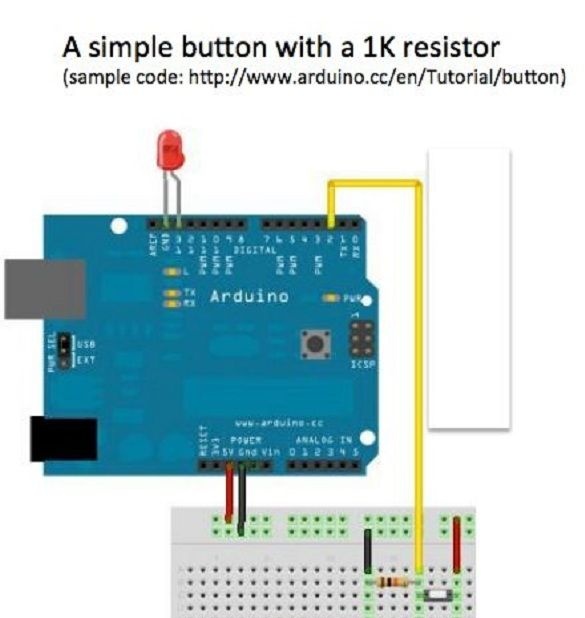
Diagramma parāda vienkāršas pogas un 1K rezistora savienojumu. Abu pogu shēma tiek atkārtota, pogas tiek novietotas abās laivas pusēs. Viņi būs atbildīgi par laivu kustības maiņu sadursmē.
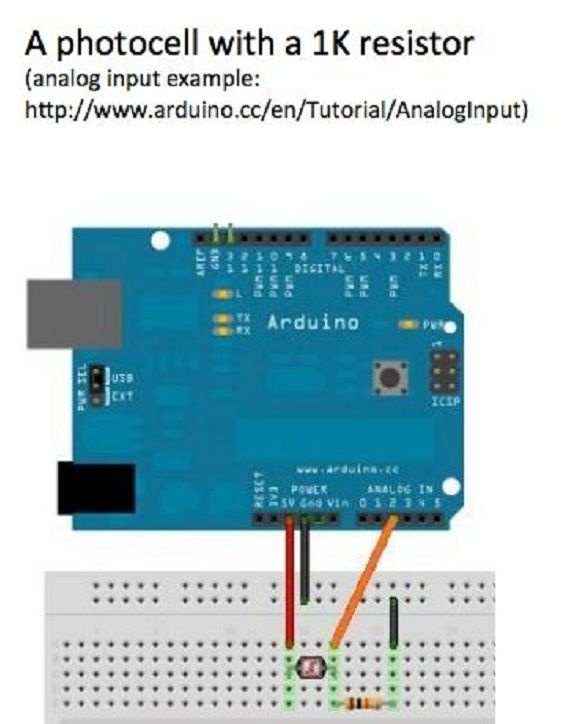
Nākamajā attēlā parādīta shēma ar 1K rezistoru un fotoelementu. Autore to veica 2 reizes un ievietoja fotoelementus laivas pretējās pusēs.
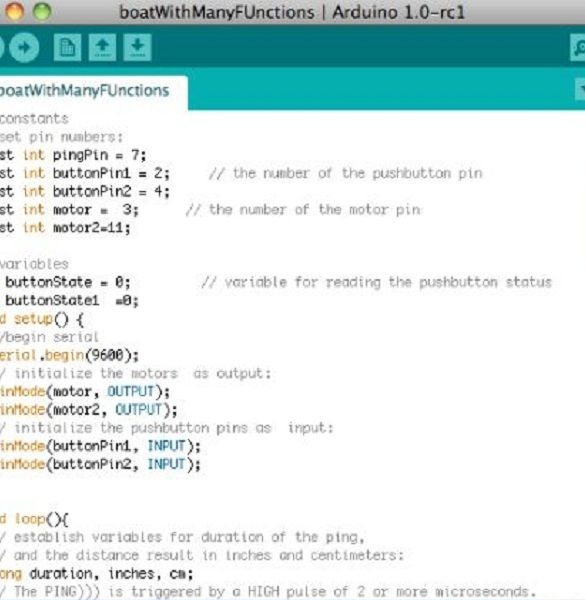
10. solis. Programmas kods.
Autors sniedza iespēju lejupielādēt tā kodu lietošanai, tādējādi nodrošinot pamata funkcionalitāti tiem, kas montēs šādu laivu. Kods ietver atbalstu fotoelementiem, attāluma meklētājam un pogām. Laiva centīsies izvairīties no šķēršļiem sev priekšā un, saskaroties ar šķēršļiem no sāniem, pagriežas pretējā virzienā. Ja nav vēlēšanās izmantot visu sensoru komplektu, bet tikai dažiem no tiem ir kods katram atsevišķi. Visus kodus varat lejupielādēt rakstā.
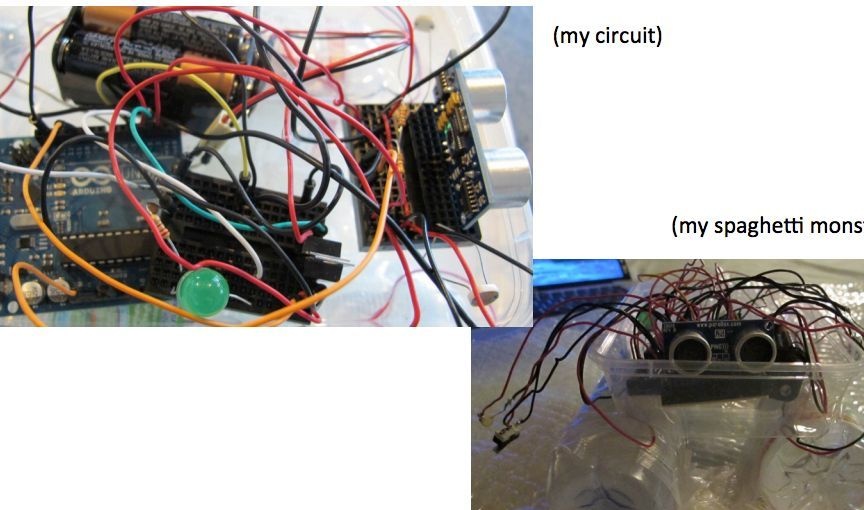
11. solis. Laivas salikšana.
Samontēta shēma, Arduino un baterijas ir kastē.
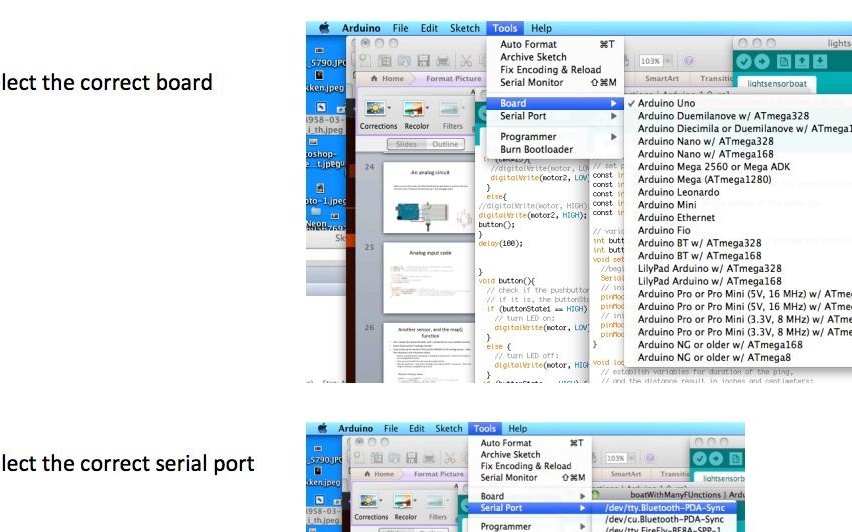
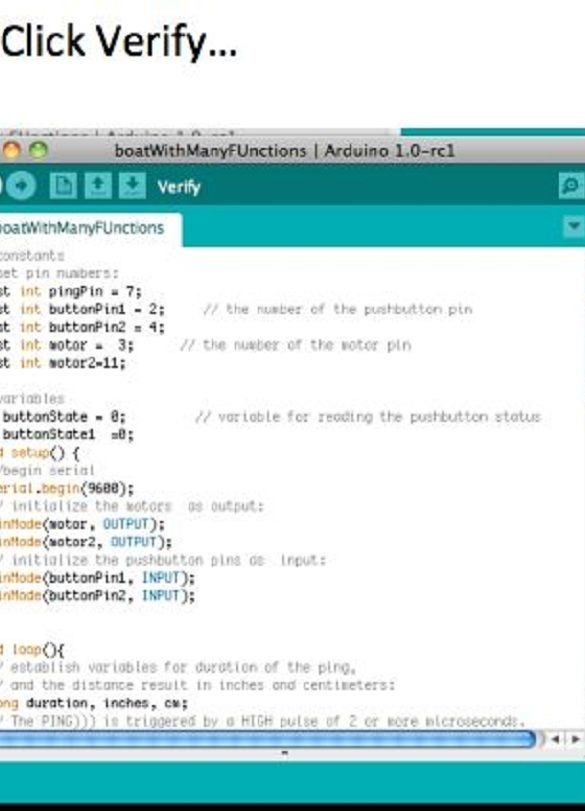
12. solis. Lejupielādējiet skici.
Tālāk tiek atvērts Arduino IDE, izvēloties pareizo failu un portu, pēc kura autors apkopoja un augšupielādēja kodu kontrolierim.
13. solis. Ūdens izturīgs un pārbaudiet.
Autore papildus izolēja visas iespējamās ūdens iekļūšanas vietas ar karstu līmi. Izolēti arī visi vadi no īssavienojuma. Tvertne ar Arduino ir pārklāta ar to pašu kastīti un aizzīmogota ar elektrisko lenti. Propelleri ir piestiprināti pie motoriem. Šeit laiva ir gatava, tagad jūs varat sākt testēšanu uz ūdens.



Video ar iepriekšēju laivu pārbaudi: