

Bieži vien forumos ir jautājumi par to, kā padarīt mazu robotu dari pats no improvizētiem materiāliem. Kāds vēlas pārbaudīt savas stiprās puses un prasmes mini-robotu izveidē, un kāds vēlas vienkārši pārsteigt draugus vai viņu bērnu. Patiesībā viss ir pavisam vienkārši, jums vienkārši ir jāparāda nedaudz pacietība un atjautība.
Mēs vēršam jūsu uzmanību uz šo videoklipu:
Lai izveidotu mazu kukaiņu robotu, jums būs nepieciešams:
- dārza lampa (saules baterija);
- divi kondensatori;
- motors;
- tranzistors VD135;
- tranzistors A733P;
- LED;
- rezistors;
- lodāmurs;
- vara stieples;
- nazis;
- karstā līme;
- saspraudes.
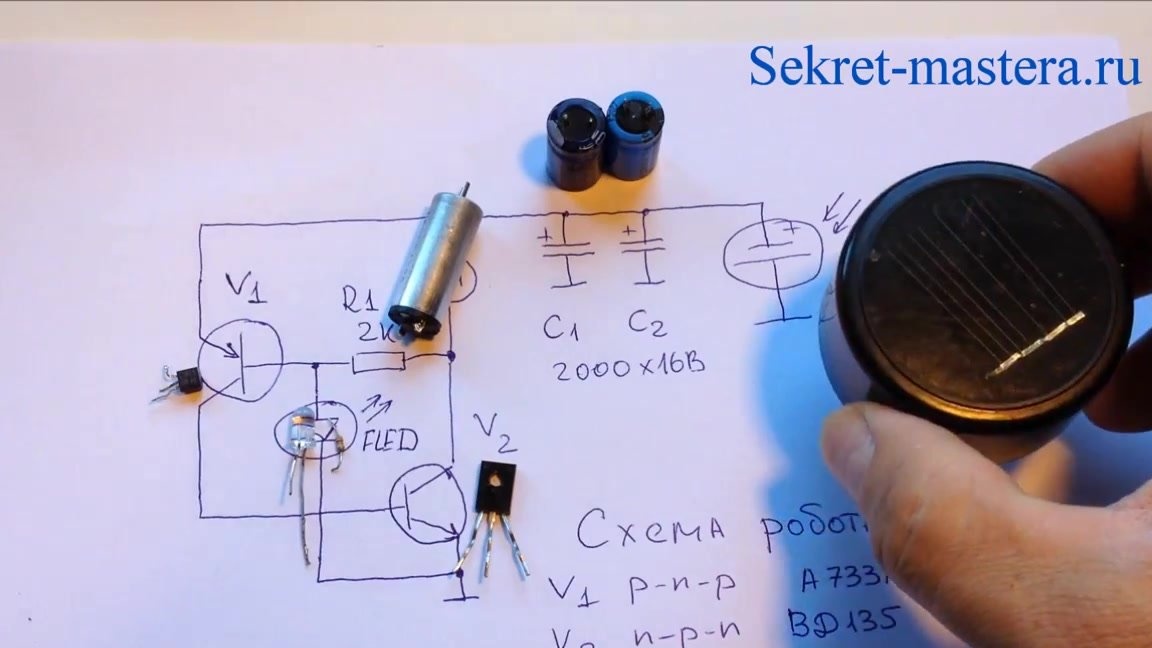
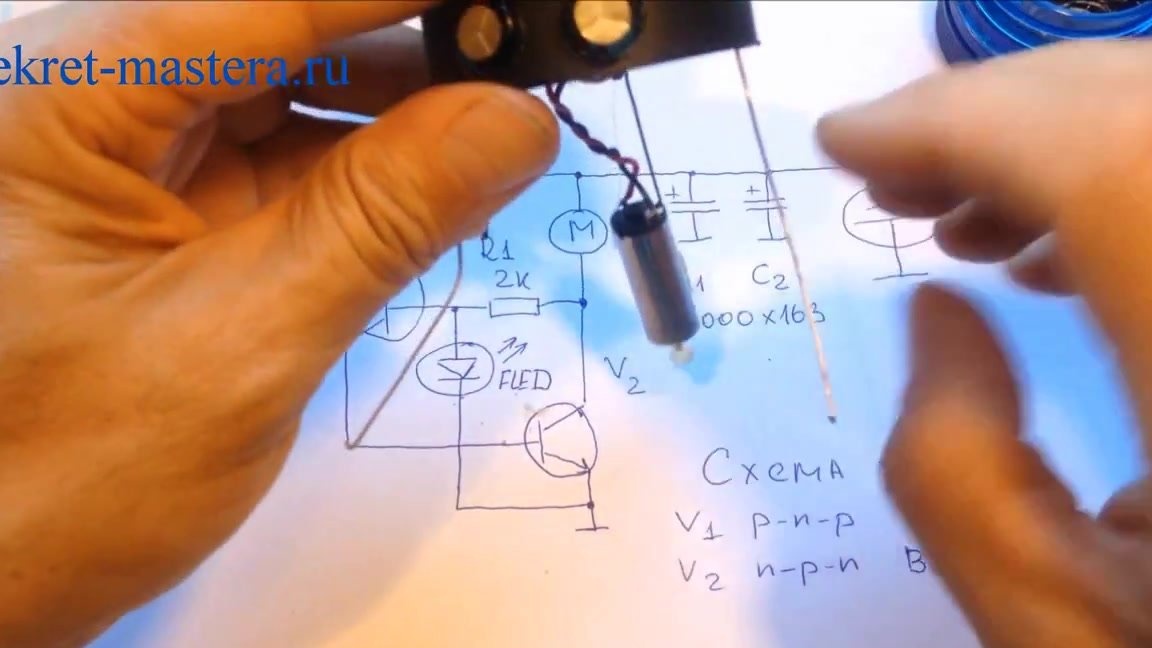
Katra kondensatora kapacitāte ir 2000 μF, nominālā spriegumam 16V.
Dzinēju var izmantot no vecās zobu sukas, un jūs varat izmantot arī motoru no vecās filmas fotokameras.
Spēcīgs tranzistors (to ir atļauts aizstāt ar vidējas jaudas tranzistoru), n-p-n struktūra, šajā gadījumā tiks izmantots VD135.
P-n-p struktūras otrais tranzistors šajā gadījumā izmantos A733P.
Mirgojoša gaismas diode, kas mirgo ar regulāriem intervāliem.
2 kΩ rezistors.

Kad visi vajadzīgie radioelementi ir sagatavoti, mēs sākam strādāt.
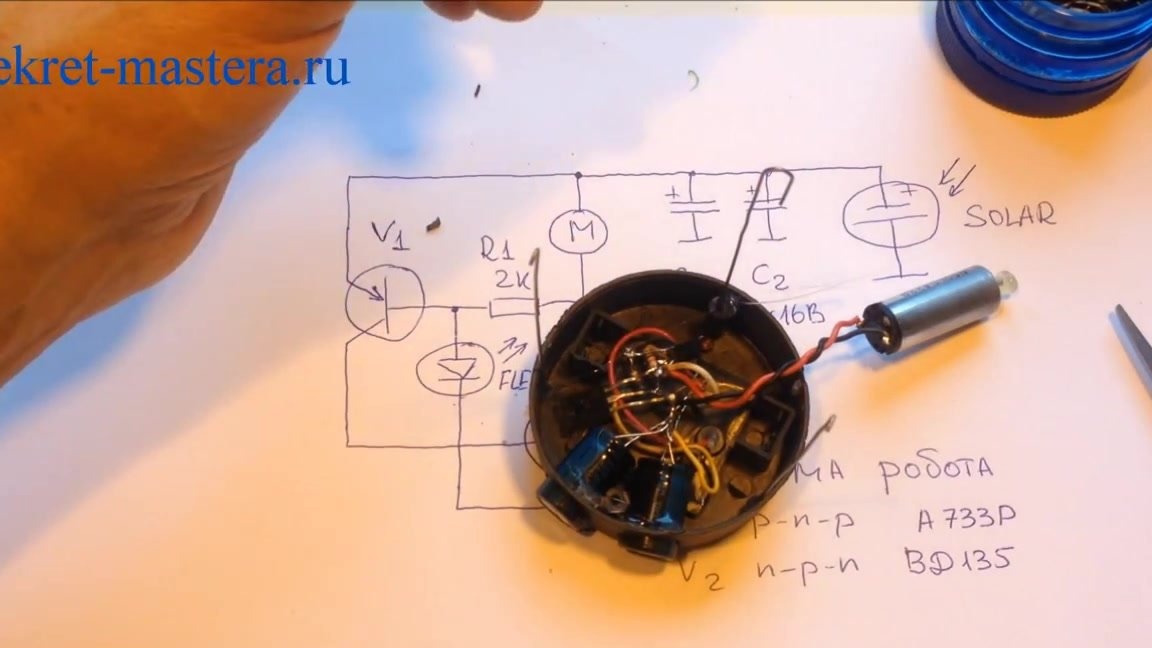
Darbības princips:
Saules akumulatora enerģija tiek uzkrāta uz diviem kondensatoriem, un ar noteiktu frekvenci tiek aktivizēta gaismas diode, kas motoram piegādā enerģiju caur jaudīgu atslēgas tranzistoru. Šajā gadījumā motors izlādē kondensatoru un veic dažas rotācijas kustības.
Montāža:
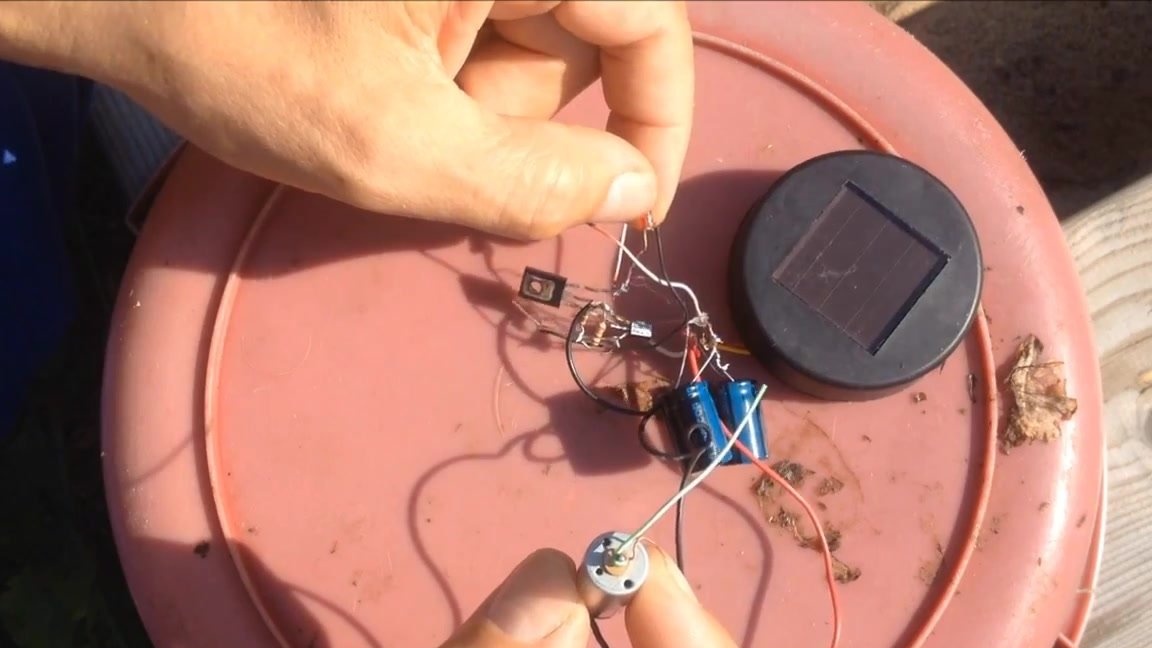
Saules baterijas gadījumā mēs ar nazi izveidojam divus caurumus un ievietojam tajos kondensatorus - tās būs mūsu kukaiņu acis. Mēs tos salabojam ar karstās kausēšanas līmi.
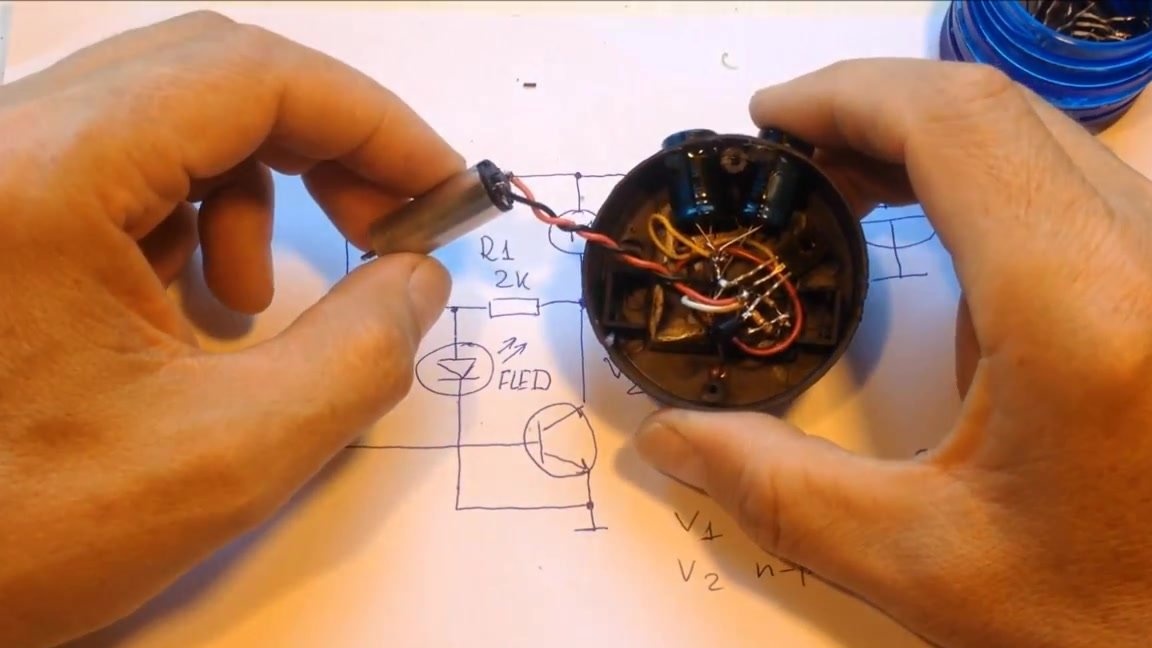
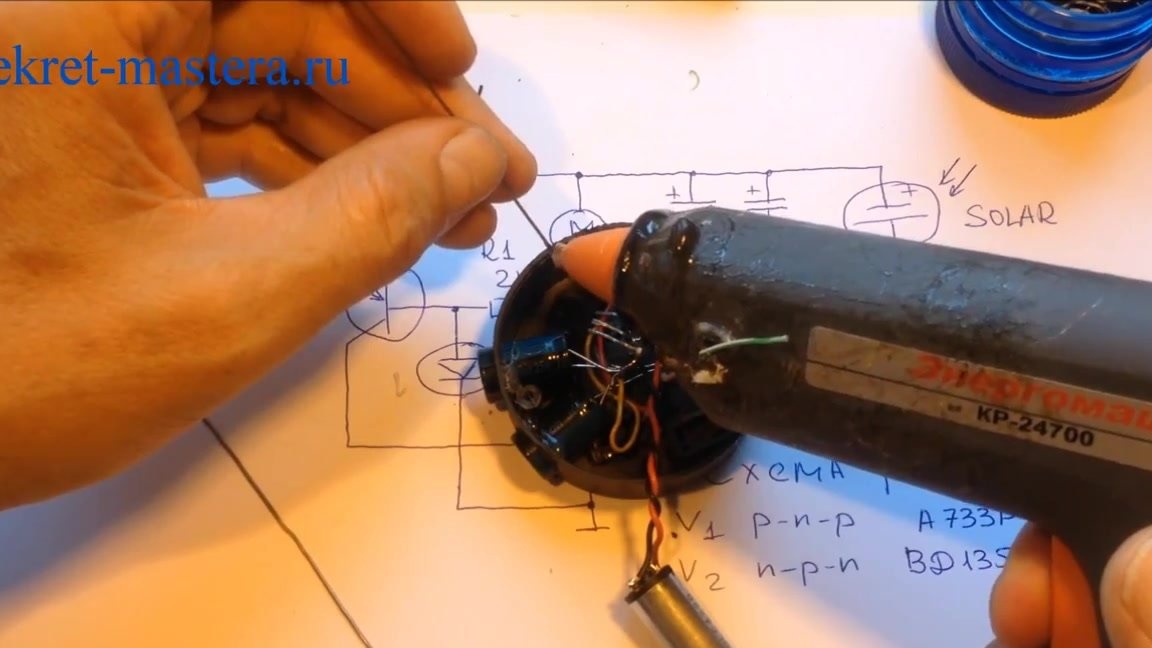
Pēc tam, izmantojot lodāmuru un vadus, mēs savācam visus radio elementus saskaņā ar shēmu.
Visi elementi ir fiksēti saules baterijas korpusa iekšpusē, uz iegarenas stieples atstājam tikai motoru un to nenofiksējam.
Motora ass galam tiek uzlikts liels līmes piliens, jūs pat vairākas reizes varat izveidot nelielu bumbiņu uzgali.
Mēs izveidosim sava kukaiņa kājas no parastajiem saspraudēm.Iztaisnojiet saspraudi, atstājot tikai mazo galu neasinātu, un piestipriniet to pie korpusa ar karsti kausējamu līmi. Kopumā mums būs trīs kājas.
Mēs piestiprinām savu motoru pie vienas no kājām, lai tā robots noliecās uz tā galā izveidoto bumbiņu.
Pēc izvēles jūs varat piešķirt kājām nepieciešamo formu, nedaudz saliekt vai iztaisnot.
