
Iedomājieties, ka jūs braucat ar bērnu elektromobili, kura gāzes pedālis ir tikai divās pozīcijās: vai nu motors ir pilnībā izslēgts, vai arī tas griežas ar fiksētu ātrumu. Kopumā tur ir vienkāršs slēdzis. Tavs uzdevums ir samazināt ātrumu, piemēram, uz pusi. Sērijā ar motoru var ieslēgt jaudīgu rezistoru, kas radīs daudz siltuma. Un jūs varat ātri nospiest un atlaist gāzes pedāli. Jums iet saraustīts, jo vairāk pamanāms, jo zemāka frekvence, bet vidējais ātrums samazināsies, kā jums nepieciešams. Mainot attiecību starp laiku, kurā ķēdes pārtraucējs ir ieslēgts, un bez darba ciklu - jūs varat mainīt vidējo ātrumu. Un slēdzis gandrīz nesasilda, jo tā pretestība ir tendence uz bezgalību, pēc tam uz nulli. Gandrīz visa jauda tiks piešķirta motoram. Kāpēc tas notiek, ir viegli aprēķināt, zinot Ohmas likumu.
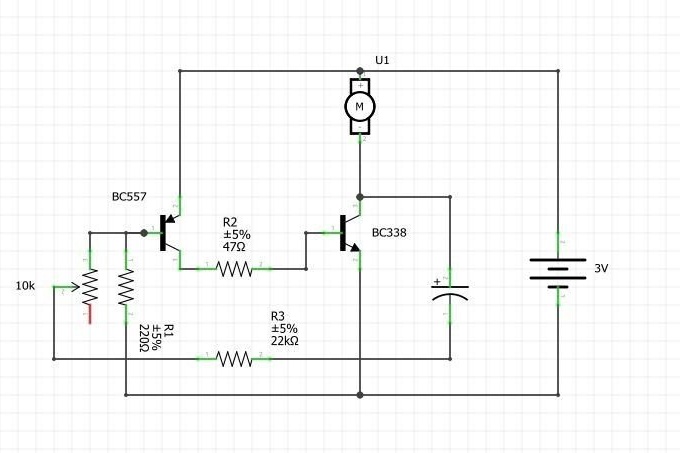
Tātad jūs saprotat, kas īsi ir impulsa platuma modulācija - PWM. Visu iepriekš aprakstīto var uzticēt automātiskai ierīcei, ko sauc par PWM kontrolieri. Tas var būt sarežģīts, saturot visu Arduino. Tas var būt vienkāršāks - divu elementu ģenerators NAND, mainīgs rezistors un divas diodes. Un tas var būt pavisam vienkārši - uz diviem tranzistoriem (salīdziniet ar to, cik tranzistoru ir Arduino):
To sauc par KISS principu, sākot no "saglabāt to vienkārši, muļķīgi". Protams, ne tiešā nozīmē - faktiski tiek saprasts, ka dizaineris, tieši cenšoties vienkāršot dizainu, ir ļoti gudrs, jo tas palielina uzticamību, apkopi un redzamību. Patiesībā, uz papildu aizsardzības, elastības un pārkonfigurācijas brīvības rēķina.
Ir skaidrs, ka piemērā pieminētais bērnu elektromobiļa motors šo ķēdi vilks tikai ar papildu kaskādi. Un bez tā - tikai mazs motors no rotaļlietas. Bet PWM kontroliera darbības princips ir parādīts pēc iespējas skaidrāk.
Šī shēma, kuru jums izgudroja Instructables ar segvārdu TheCircuit, ir asimetrisks multivibrators ar dažādu struktūru tranzistoriem. Tieši tāds pats kā B.S. Ivanovs, V.G. Borisovs.Tam ir pievienoti tikai divi rezistori: mainīgs rezistors un ar to virknē savienota konstante, lai visas ķēdes pretestība nekļūtu pārāk zema. Tie ir iekļauti ķēdē tā, ka, pielāgojot multivibratora radīto vibrāciju darba ciklu, mainās.
Dažādu struktūru tranzistoru izmantošana multivibratorā ļauj samazināt tajā esošo kondensatoru skaitu līdz vienam. Šeit tas ir elektrolītisks, pie 100 uF un 60 V, šis spriegums tiek izvēlēts ar labu rezervi. Rezistori: nemainīgi - 47 omi, 22 kOhm, 220 kOhm, noregulēšana (varat izmantot lielu mainīgo) - 10 kOhm. Tranzistori - BC557 un BC338. Strāvas avots ir divi AA vai AAA elementi, labāk nekā sāls elementi, tāpēc, ja kaut kas noiet greizi, nekas nekļūst pārāk karsts. Krava ir mazjaudas elektromotors no rotaļlietas. Paralēli viņam ir labi savienot diodi ar apgrieztu polaritāti. Tas uzņems pašindukcijas impulsu, kas rodas, pēkšņi izslēdzot motoru, un pasargās tranzistoru no tā.
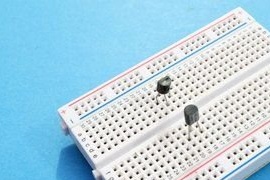
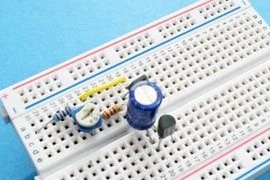
Tā kā TheCircuit samontē ierīci uz maizes dēļa tipa maizes tāfeles, komponentu uzstādīšanas secībai nav nozīmes. Tātad, viņš vispirms nosaka tranzistorus. Ja jūs samontēsit šo regulatoru, lodējot, ielieciet tranzistorus pēdējos, lai tos nepārkarsētu.
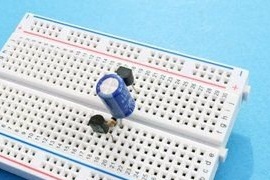
Tad kapteinis ievieto kondensatoru uz tāfeles pareizajā polaritātē:
Rezistori:
Džemperi:
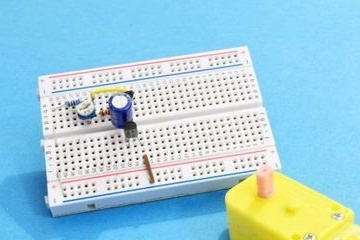
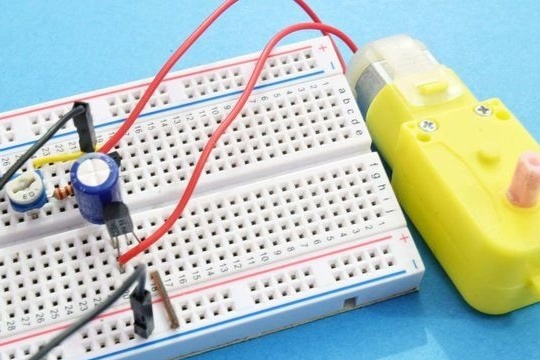
Savieno motoru:
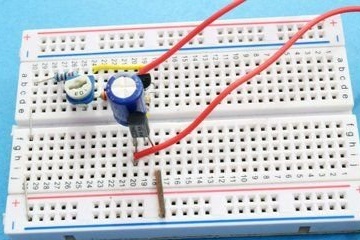
Ja motors vienkārši gulēs uz galda, tā savienojuma polaritāte nav svarīga, un, ja pārvietojat jebkuru mehānismu, ir svarīgi to savienot tā, lai tas pagrieztos vēlamajā virzienā. Starp citu, izstrādātājs ņēma motoru ar pārnesumkārbu, kas palielina redzamību: tas ir skaidri redzams un kādā virzienā tas griežas, un ar kādu ātrumu. Bet barošanas avota savienojuma polaritātei jāsakrīt ar diagrammā norādīto: plus augšpusē. Šeit kapteinis nonāk pie viņa:
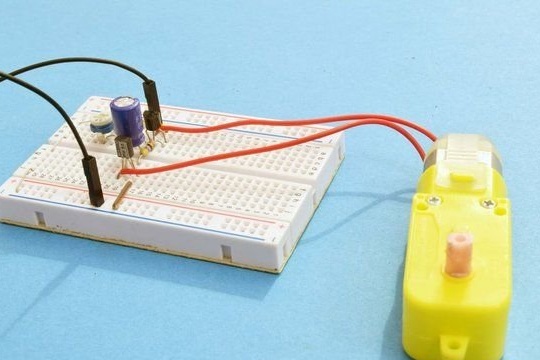
Tagad jūs varat pagriezt tūninga pretestību (vai mainīgu, atkarībā no tā, kuru iestatāt), skatīties, kā mainās ātrums, un pārliecinieties, vai otrā tranzistora sildīšana pie jebkura ātruma ir maza (un pirmais, un vēl jo vairāk). Tagad pabeidziet ķēdi ar slēdzi, kas virknē savienots ar enerģijas avotu, un pievienojiet apvalku.